二维平台设计
基于单片机二维数控实验平台设计与实现
优秀设计基于单片机的二维数控实验台的设计与实现摘要本设计结合机电一体化课程教学环节需要,设计用单片机作为控制系统的X-Y工作台。
通过论述X-Y工作台机械结构设计和控制电路接口设计,阐述了机电一体化设计中的共性和关键技术.基于单片机二维数控系统是以单片机为主体,二维数控实验平台为核心的系统。
主要应用单片机作为控制核心,LED点阵显示芯片与数控系统相结合的系统。
充分发挥了单片机的性能。
其优点硬件电路简单,软件功能完善,控制系统可靠,性价比较高等特点,具有一定的使用和参考价值。
该系统设计是一个开环控制系统,其结构简单.实现方便而且能够保证一定的精度.降低成本,是控制技术的最简单的应用.它充分的利用了单片机软件硬件功能以实现对机床的控制;使机床的加工范围扩大,精度和可靠性进一步得到提高.系统设计是利用AT89S51单片机,及27128,6264存储器及8155芯片等硬件组成,在控制系统的硬件上编写一定的程序以实现一定的加工功能.其基本思想是:通过单片机控制使电机运动从而实现工作台的移动。
关键词:X—Y工作台;单片机;机电一体化设计NC-based single-chip two-dimensional test-bed designand implementationAbstractThe combination of mechanical and electrical design aspects of the integration of teaching needs, the design of control systems with single-chip microcomputer as the XY table. XY table through on the design of mechanical structure and control interface circuit design, mechanical-electrical integration on the design of the common and key technologies.Two-dimensional numerical control system based on single-chip based on single-chip microcomputer as the main body, the experimental two-dimensional numerical control system as the core platform. The main application of single-chip microcomputer as control core, LED dot matrix display system chips with a combination of CNC system. Give full play to the single-chip performance. Advantage of simple hardware circuit, software functions, the control system reliable and cost-effective features such as high, with a certain degree of use and reference value.The system design is an open-loop control system, its simple structure, convenient and can realize. Sure. Reduce cost, is the most simple control technology application. It fully utilize the MCU software and hardware function to realize the control of machine tools, Machine processing expanded, accuracy and reliability is further improved.System design is to use 27128,6264,AT89S51 and memory and 8155 chips, hardware composition in the control system of the hardware written procedures to achieve certain processing function. The basic idea is: through the single-chip microcomputer control make motor sports so as to realize the worktable moving.Key words: X-Y table; singlechip; mechatronics design目录第1章绪论………………………………………………………………………… .11.1课题意义 (1)1.2课题研究主要内容 (1)第2章机械系统设计 (2)2.1设计参数的确定 (2)2.2 总体方案设计 (2)2.2.1传动部件的选择 (3)2.2.2控制系统的设计 (3)2.2.3步进电机的选用 (4)2.2.4滚珠丝杠的设计计算 (5)2.2.5滚动导轨的参数确定 (7)2.2.6 滚动轴承选型…………………………………………………… .82.2.7 滚动导轨刚度及预紧 (9)2.2.8步进电机惯性负载的计算 (9)第3章控制系统设计 (11)3.1 硬件配置 (11)3.2 总体接口设计 (17)3.2.1键盘设计 (17)3.2.2 显示器设计............................................................... .19 3.3 步进电机驱动电路和工作原理 (22)3.4总体程序控制 (23)第4章基于单片机的二维数控实验台的实现 (26)4.1 搭建单片机电路 (26)4.2 调试程序 (27)4.3 单片机控制完成,实现功能要求 (28)总结 (29)致谢 (30)参考文献 (31)第1章绪论1.1课题意义二维数控实验平台系统设计是一个开环控制系统,其结构简单.实现方便而且能够保证一定的精度.降低成本,是控制技术的最简单的应用.它充分的利用了单片机软件硬件功能以实现对机床的控制;使机床的加工范围扩大,精度和可靠性进一步得到提高.1.2课题研究主要内容二维数控实验平台系统设计是利用AT89S51单片机,及27128,6264存储器及8155芯片等硬件组成,在控制系统的硬件上编写一定的程序以实现一定的加工功能.其基本思想是:通过单片机控制使电机运动从而实现工作台的移动。
二维扫码平台设计方案

二维扫码平台设计方案二维码是一种手机扫描二维码的平台,它可以将二进制数据以图形的方式储存在二维码中,用户可以通过扫描二维码来获取相关信息。
二维码的应用非常广泛,可以用于支付、身份验证、商品信息查询等多个领域。
下面是一个二维扫码平台的设计方案。
1. 用户端用户端是用户使用二维码扫描功能的终端,可以是手机、平板电脑等设备。
在用户端,需要有一个二维码扫描功能的应用程序,用户通过打开应用程序后,可以使用手机摄像头对二维码进行扫描。
扫描后,应用程序会解析二维码中的数据,并将相应的信息展示给用户。
2. 服务器端服务器端是承担二维码解析和数据处理的部分。
在服务器端,需要有一个二维码解析的算法,可以将扫描的二维码中的数据解析出来。
解析后的数据可以是网址、文本、图片等形式。
服务器端还可以对解析出来的数据进行处理,例如验证身份、查询商品信息等。
3. 数据库在二维扫码平台中,需要有一个数据库来存储用户的数据。
数据库可以存储用户的扫描记录、用户的个人信息等。
数据库还可以用来存储商家的商品信息、用户订单等。
数据库的设计需要考虑到数据的安全性和可靠性。
4. 商家端商家端是商家使用二维码生成的终端。
在商家端,商家可以生成二维码,并将二维码打印在商品上,或者在店铺中展示出来。
商家还可以通过商家端的应用程序来查询和管理二维码的使用情况,例如查看扫描记录、统计销量等。
5. 安全性设计在二维扫码平台中,安全性是非常重要的一个方面。
为了保证用户的数据安全,可以采用加密算法对用户的数据进行加密存储。
同时,二维码的生成和扫描也需要考虑到安全性,可以采用防伪措施,防止二维码被恶意篡改。
6. 用户体验设计在二维扫码平台的设计中,用户体验是一个重要的方面。
为了提供良好的用户体验,可以设计简洁明了的用户界面,提供易于操作的功能,减少用户的操作步骤。
同时,还可以提供扫描记录的查询和管理功能,方便用户对扫描的数据进行查看和管理。
综上所述,二维扫码平台的设计方案需要考虑到用户端、服务器端、数据库、商家端、安全性和用户体验等多个方面。
基于组态王的二维示教实验平台设计
、
对象 。每轴使用 一个编码 器用于将位 置坐标转 化为光 电脉 冲
量。 编码器选用的是 IC88O 1一 50 增量式旋转编码器。 H30一0G20 ,
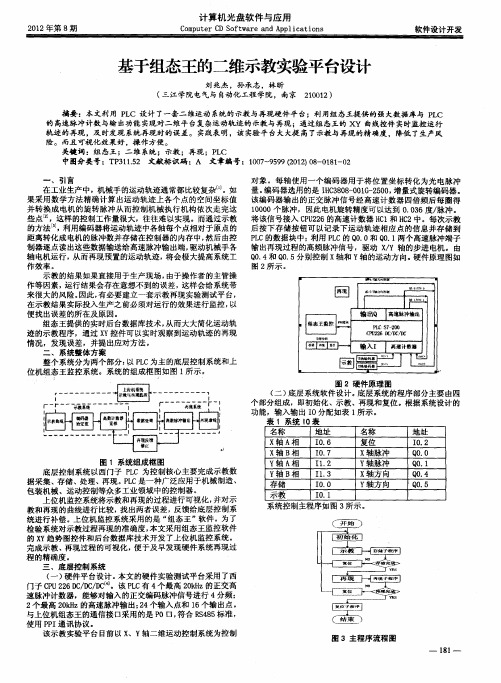
该编码器 输 出的正交脉冲信 号经高速计 数器 四倍频 后每 圈得 10 0个 脉冲 ,因此 电机旋转精度可 以达 到 0 0 6度/ 冲。 00 .3 脉 将该信号接入 C U 2 P 2 6的高速计数器 H I H 2中。每次示教 C和 C 后按 下存储按钮 可 以记录 下运动轨迹 相应点 的信 息并存储 到 P C的数据块 中; L 利用 P C的 Q . L o 0和 Q . 两个 高速脉冲 端子 OI 输 出再现过程 的高 频脉 冲信 号,驱动 X Y轴 的步进 电机 。 由 / Q. O 4和 Q . O 5分别控制 x轴和 Y轴的运动方 向 硬件 原理 图如
图 3主程序流程图
一
l 1— 8Байду номын сангаас
图 2所 示 。
图 2硬件原理图 ( ) 二 底层系统软件设计。底层系统的程序部分主要 由四 个部分组成,即初 始化、示教、再现和复位 。根据系统设计的 功能,输入输 出 I O分配如表 l 示。 所 表 1系统 l 0表 名称 地 址 名称 地址 X轴 A相 工 . O6 复位 X轴 B相 1 . 07 X 轴脉 冲 Y轴 A相 I . 12 Y轴脉冲 Y轴 B相 I . 13 X 方向 轴 存 储 I. OO Y 方向 轴 示教 1 . 01 系统控制主程序如 图 3所示 。 1. 02 Q . O0 Q . 01 Q . O4 Q. O5
图 1系统组成框 图 底层控制系统 以西门子 P C为控制 核心 主要完成示教数 L 据采集 、存储、处理 、再现。P C是一种广泛应用 于机械 制造、 L 包装机械 、运动控制等众 多工业领 域中的控制器 。 上位机监控系统将示教和再现 的过程进行可视化 , 并对示 教和再现的 曲线进行 比较 ,找出两者误差,反馈给底层控制系 统 进行补偿 上位机监控系统采用 的是 “ 组态王 ”软件 。为 了 检 验系统对示教过程再现 的准确度 , 本文采用 组态 王监 控软件 的x Y趋势图控件和后 台数据库技术开发 了上位机 监控 系统 。 完成示教 、 再现过程的可视化 , 便于及早 发现 硬件 系统再现过 程 的精 确度。 三 、底层控制系统 ( 一)硬件平 台设计 。 本文 的硬件实验测试平 台采 用了西 门子 c U2 6D / c D 。该 P C有 4个最高 2 k z的正交高 P 2 C D / c L 0H 速脉冲 计数 器,能够对输入 的正交编码脉冲信 号进行 4分频 ; 2个最 高 2 k z的高速脉冲输 出;4个输入点和 1 0H 2 6个输 出点。 与上位 机组 态王的通信接 口采用 的是 P O口, 符合 R 4 5标准 , S8 使用 P I 讯协议。 P通 该示教实验平 台 目前 以 X 、Y轴二维运动 控制系统为控制
二维运动平台课程设计

二维运动平台课程设计一、课程目标知识目标:1. 学生能理解二维运动平台的基本概念,掌握其在物理运动中的应用。
2. 学生能运用公式计算二维运动平台的速度、加速度和位移。
3. 学生能解释二维运动中的力的合成与分解,理解牛顿运动定律在二维运动中的应用。
技能目标:1. 学生能够运用物理知识分析并解决二维运动平台的相关问题。
2. 学生通过实际操作,培养动手能力和团队合作能力,提高解决实际问题的能力。
3. 学生能够运用数学工具,如坐标系、图形等,进行二维运动轨迹的描述和分析。
情感态度价值观目标:1. 学生培养对物理科学的兴趣,激发探索精神和创新意识。
2. 学生在学习过程中,树立正确的科学态度,尊重事实,严谨求证。
3. 学生通过团队合作,学会倾听、沟通与协作,培养集体荣誉感和责任感。
课程性质分析:本课程为物理学科,针对学生年级特点,注重理论与实践相结合,提高学生的物理素养和解决实际问题的能力。
学生特点分析:学生处于好奇心强、求知欲旺盛的阶段,具备一定的物理和数学基础,但需要引导他们将知识应用于实际问题。
教学要求:1. 教师需采用生动有趣的教学方法,激发学生学习兴趣。
2. 教学过程中注重培养学生的动手能力和团队合作精神。
3. 教师应关注学生个体差异,给予个性化指导,提高学生的综合素质。
二、教学内容1. 二维运动平台基本概念:介绍二维运动平台的定义、构成和应用场景,使学生理解其在现实生活中的重要性。
- 教材章节:第二章第二节2. 二维运动平台的运动学分析:- 速度、加速度和位移的计算公式;- 运用坐标系描述二维运动轨迹;- 教材章节:第三章第一节、第二节3. 力的合成与分解在二维运动中的应用:- 牛顿运动定律在二维运动中的体现;- 合力与分力的计算方法;- 教材章节:第四章第一节、第二节4. 实际操作与案例分析:- 设计二维运动平台实验,让学生亲自动手操作,观察和分析实验现象;- 分析典型案例,使学生掌握解决实际问题的方法;- 教材章节:第五章5. 数学工具在二维运动中的应用:- 坐标系、图形等数学工具在二维运动轨迹描述和分析中的作用;- 教材章节:第六章教学安排与进度:本教学内容共计10课时,具体安排如下:1-2课时:二维运动平台基本概念;3-4课时:二维运动平台的运动学分析;5-6课时:力的合成与分解在二维运动中的应用;7-8课时:实际操作与案例分析;9-10课时:数学工具在二维运动中的应用。
二维精密工作台设计

⼆维精密⼯作台设计⽬录第⼀节《测控仪器课程设计》要求 (1)第⼆节国内外现状 (2)第三节⽅案设计 (5)第四节测量控制⽅法设计 (13)第五节未来展望与总结 (18)参考⽂献 (20)第⼀节《测控仪器课程设计》要求⼀课程设计⽬的:测控仪器课程设计是⼀次⽐较完整的仪器设计,它是理论联系实际、培养初步设计能⼒的重要教学环节,完成课程设计的⽬的有⼀下⼏点:(1)培养学⽣综合地考虑使⽤、经济、⼯艺、安全性等⽅⾯的设计要求,确定合理的设计⽅案。
(2)测控仪器设计是综合光学,电学,机械学,控制等多门课程的⼀个系统⼯程,培养学⽣从全局出发,体会各个学科融合的⼀次实战演练。
(3)培养学⽣仔细阅读本课程指导书和随时查阅有关教材。
(4)通过分析⽐较吸取现有结构中的优点,并在此基础上发挥⾃⼰的创造性,⽽不是简单抄袭或没有根据在臆造;(5)培养学⽣制图功底,训练学⽣通过计算参数,最后完成设计制图的能⼒,(6)了解国内外的技术前沿,以及现有企业可以提供的各种封装产品技术参数。
⼆课程设计技术要求课题名称:基于CCD边缘检测的⼆维测量系统设计要求:1. ⼆维精密⼯作台系统X轴⾏程范围10mm,分辨率0.1um,精度要求0.5um;Y轴⾏程范围10mm,分辨率0.1um,精度要求0.5um;2. CCD测量系统边缘识别,精度要求1um;三设计说明书要求1.根据设计任务要求,确定设计⽅案。
2. 详细讨论系统各部分的实现⽅法和原理。
3.按照技术指标要求计算相应的机械结构参数,有国家标准的零部件,过计算选取。
4.完成设计说明书⼀份,仪器⼯作原理图⼀张,总装配图⼀张(0号),零件图5张以上。
5.提交设计报告书。
要求打印,并列出参考⽂献。
设计说明书要求5000字。
第⼆节国内外现状⼀⼆维精密⼯作台系统随着微电⼦⼯程、计量科学与技术、精密加⼯、纳⽶科学与技术等领域的发展,使微纳⽶定位机构得到了越来越⼴泛的应⽤,各国不断发展微动定位的⼯作,不仅要求有⾼的定位精度,⽽且要求在⽐较⼤的范围内做测量。
基于PLC二维数控实验平台设计与实现

优秀设计基于PLC的二维数控实验台的设计与实现[摘要]本论文课题是基于PLC的二维数控实验台的设计与实现,目的是为了了解二维数控实验台的设计方法和特点,以及如何用PLC控制数控实验台的动作,将所学到的理论知识运用到实际设计之中,理论和实践相结合。
本文首先通过对怎样用PLC控制数控实验台的介绍加深人们对PLC控制的了解。
然后对实验台进行分析,最终确定PLC对数控实验台的速度与位移的控制。
在对实验台机械结构进行设计的过程中,主要对滚珠丝杠螺母副和电机进行了计算、选型、校核,确保了机械传动部件的精度和刚度,使之满足系统的要求:通过计算,选择了步进电机驱动。
实验台有极限位置限位,当实验台运行过极限位置时,应将主控电路切断。
运动控制分自动和手动两种,自动和手动的转换,由操作面板上进行设置。
不论是手动还是自动,开始运行时首先启动电机,同时接通I/O回路电源。
如遇到意外,可按急停按钮,停止电机,同时切断回路电源。
[关键字]PLC控制,二维数控实验台PLC-based two-dimensional test-bed CNC Design andImplementation【Abstract】In this paper, the subject is based on the PLC of the two-dimensional test-bed CNC Design and Implementation, In order to understand the purpose of test-bed two-dimensional numerical control design method and characteristics of, PLC control, as well as how to test the action of NC, Learned to use the theoretical knowledge to practical design, combination of theory and practice.In this paper, through the PLC to control how the introduction of NC test-bed to deepen people's understanding of PLC control. And then an analysis of the test-bed, CNC PLC to finalize the test-bed for the speed and displacement control.In the mechanical structure of the experimental design process, Vice-principal of the ball screw and motor calculated, selection, checking to ensure the accuracy of mechanical transmission components and stiffness, So as to meet the system requirements: through the calculation, select the stepper motor driver.There is a limit on the location of test-bed limit, When the test-bed run-off limit, the control circuit should be cut off. Motion control of two sub-automatic and manual, automatic and manual conversion, carried out by the operator panel settings. Whether manually or automatically, First of all, start at the beginning of operation of motors, At the same time to connect I / O circuit power. In case of accident, Stop button can stop the motor, at the same time cut off the power circuit.【Key words】PLC control CNC two-dimensional test-bed目录第一章前言 (1)1.1设计课题的意义 (2)1.2设计任务的介绍 (2)1.3 PLC实验台的组成 (2)第二章方案的确定 (3)2.1设计参数 (3)2.2机械传动部件的选择 (3)2.3控制系统的设计 (4)第三章机械部分的设计 (5)3.1导轨上移部件的重量估算 (5)3.2直线滚动导轨副的计算 (5)3.2.1滑块承受工作载荷的计算 (5)3.2.2导轨额定寿命的计算 (5)3.3滚珠丝杠副的计算 (6)3.3.1滚珠丝杠副最大动载荷的计算 (6)3.3.2初选滚珠丝杠副的型号 (6)3.3.3 传动效率的计算 (6)3.3.4刚度的校验 (7)3.3.5压杆稳定性校验 (8)3.4步进电动机的计算 (8)3.4.1计算加在电动机转轴上的总惯动惯量 (8)3.4.2计算加在电动机转轴上的等效负载转矩 (9)3.4.3步进电机最大静转矩的确定 (10)3.4.4步进电动机的性能校核 (10)第四章PLC控制系统的设计 (13)4.1 PLC的选择 (13)4.2 PLC的I/O地址分配 (15)4.3 位置控制模块的设计 (16)4.3.1定位模块初始化设定 (16)4.3.2定位位置和速度设定 (17)4.4 步进电机驱动器的选择 (18)致谢 (20)附录 (21)参考文献 (22)外文翻译 (23)第一章前言1.1 设计课题的意义机电一体化毕业设计在机电一体化专业教学中占有重要位置,它关系到学生知识的综合运用和学生动手能力的培养及机电产品开发的能力。
直线电机驱动二维精密定位平台的设计研究

基金项 目: 榆林学 院高层次人 才科 研启动基金项 目( 8 K 3 ) 0 G 0 7 作者简 介 : 曹卫锋 (97 ) 男 , 17一 , 陕西 武功人 , 助教 , 在读博 士 , 研究 方 向: 机械设计与制造 的教学 与研 究。
1
Eq i me t u p n Ma ua tig T c n lg . 2 1 n fc r e h oo y No9, 0 2 n
T ANG h - i g , AO Hu - a g , S u yn C i f n MA o q n W ANG e g’ Ru - u , Fn
( . ae t x m n t nC o eai etr f h aet fc B in 0 10C ia 1 P tn E a iai op rt nC ne e t i e ig10 9 ,hn ; o o o T P n O e, j 2 N c a dR da o a t C nr, e ig1 0 8 C ia . ul r n ait nS f y e t B in 0 0 2,hn ) e a i e e j
二维定位平 台总体设计结合 了大范 围超精密定 位系统的技术指标 , 其技术要求如下 : 自由度 : 、 x Y两维 ;
图 1 二 维定 位 平 台 结 构 简 图
在台子 的侧面上 。
收 稿 日期 :0 2 0 - 8 2 1- 6 0 -
重复计算 电机峰值 力和平均连续输 出力 ,校核被选
1 二维定 位平 台的设计
11 总体 设计 .
11. 、7底座导 轨 2上 台 3上 台 电极 动子 4上台输 出部分 5下 台直 . . . . 线 电机 磁轨 6 台光 栅读数头 7下台直线 电机 动子 8 . 上 . . 限位装 机械 置 9 台光栅支架 1 、5 台导 轨 l. . 上 O 1. 上 1 下台光栅支架 1. 台直线 2 上 电机 l . 3 上台光栅读数头 l . 台机械限位 1. 4 上 6 底座
二维平台的力学耦合分析及解耦设计

二 维 平 台 的 力 学 耦 合 分 析 及 解 耦 设 计
苏 文
( 北 电子 技 术 研 究 所 , 宁 东 辽 锦 州 l10 ) 2 0 0
摘
要 : 二维 平 台 为研 究 对 象 , 绍 了影 响 平 台精 度 的 主要 干 扰 源 , 据 平 台 的 结 构 特 点 , 析 了 两 环 间 的转 动 惯 量 耦 合 、 以 介 根 分
为了解除光 学 系统 视 场 角 的 限制 , 光学 系统 将
擦约束 影响平 台的稳 定 性 . 种干 扰 源通 过 机 械连 各
安装 在二维平 台上 , 以扩大 其动态视 场范 围 . 减少 系 统个数 , 提高 系统 的工 作 效率 和 利用 率 是 现 代机 电
装备发 展的一 个重 要 特 点 . 平 台的运 动 会 影 响 系 但
要 问题 .
由于 系统 整体 质 心与 转 动轴线 不 完全 重合 , 平 台在运 动时产 生干扰 力矩使方 位环 与俯仰 环偏离 原 始位置 , 加大力 学耦合 程度 . 12 摩 擦力矩 . 只要平 台有运动 , 就存 在摩擦力 矩 , 主要 包括轴 承的摩擦 力矩 和有 刷 电机 的 电刷 摩 擦 力矩 等 . 摩擦 力矩 的存 在将 增大 动力学耦 合程度 .
c u l g i n te i e n y o e lo o a e . Th a u e fr mi i i n o p i g o y a c n h o p i o x s wh n o l n o p r t t s n s t e me s r o nm z g c u l f d n mis a d t e i n m e h fu c u l e i n o t u t r l e i n a e b o g t t o o n o p e d sg n s r c u a sg r r u h . d d d Ke o d :wo d me s n pa f r ;o p ig; n o pe e i n y w r s t i n i lt m c u l o o n u c u ld d s g
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
设计要求
1、实现X-Y两坐标联动; 2、用步进电机或交流伺服电机作驱动元件; 3、设置工作台的越位报警和紧急事故的急停 开关,并响应中断; 4、任意平面曲线的加工,具有自动换象限的 功能; 5、平台具有快速驱动功能; 6、平台具有断电手动调整功能。
设计内容
1、机械总装配图 在CAXA或AUTOCAD环境下或手绘两维运动平台的结构 图,进行详细设计,最后用A1、A0号图纸打印输出。 2、硬件电路图 控制芯片可采用8031、80C31、基于PLC的运动控 制技术、PLC高速脉冲输出口和运动控制器,在Protel 环 境下或手绘控制电路图的设计,电路图幅A2~A1为宜。 3、设计说明书 要严格按照内蒙古工业大学课程设计(论文)说明 书书写规范认真撰写,说明书不少于6000字。
5、答辩---------------------------------------------------1天
主要参考文献
[1]尹志强等.机电一体化系统设计课程设计指导书[M].北京:机械工 业出版社,2009 [2]山东博特精工股份有限公司: [3] 滚珠丝杠、线性滑轨[OL].天津海特传动机械有限公司. [4]滚珠丝杠、线性滑轨[OL]. 汉意精工. [5] 步进电机及驱动器、交流伺服电机及系统[OL].步进机电有限公 司. [6]步进电机及驱动器[OL].北京斯达微步控制技术有限公司. [7] RORZE高精度步进电机及驱动器[OL].北京伟恒升集团. [8] 步进联轴器,编码器联轴器,微型电机联轴器[OL].广州菱科自动 化设备有限公司:
专业综合设计二题目
通用两维 运动平台 设计 (8)
小型数控卧 式镗铣床主 轴箱升降和 制动装置设 计(3)
小型数控立 式铣床工作 台升降和制 动装置工 作平台 (40)
数控转台(40)
一维振动工作平台(40)
通用两维运动平台设计
课程设计的目的
●通过本次课程设计,培养学生运用所学《机电装备设计》课 程的知识,对典型机电装备的工作原理、组成要素及核心技术 问题的分析能力; ●培养学生应用《机电装备设计》的知识及相关知识体系,掌 握如何将机械和电气驱动、检测技术和计算机控制融合在一 起,如何构成一种性能优良、工作可靠及结构简单的机电装 备的一般设计方法和规律,提高设计能力; ●通过设计实践,熟悉设计过程,学会正确使用资料、正确使 用图书特别是电子图书资源、网络资源,查阅技术文献、设计 计算、分析设计结果及绘制机械、电气图样,在机电一体化技 术的运用上得到训练; ●通过课程设计的全过程,为学生提供一个较为充分的设计空 间,使其在巩固所学知识的同时,强化创新意识,在设计实践 中深刻领会机电装备设计的内涵。
(3)中等:能完成任务书所规定的各项任务,对所 研究的问题表现出一定的分析、计算、论证能力;说 明书、图纸质量一般;完成的软、硬件尚能达到规定 的性能指标;语言较准确,文档基本齐全,书写比较 规范。 (4)及格:基本完成了任务书所规定的各项任务, 对所研究的问题能进行分析、计算、论证;说明书、 图纸不够完整;完成的软、硬件性能较差;语言较准 确,书写尚规范。 (5)不及格:未完成任务书所规定的各项任务,对 所研究的问题分析、计算、论证很少;说明书、图纸 质量较差或有抄袭现象;完成的软硬件性能差;内容 空泛,表述不清。
专业综合设计2的主要内容和要求
以通用两维运动平台设计为例介绍
技术参数: 1、运动平台面尺寸: 200×160;250×200;320×250;400×320; 500×400;600×500;1000×800;1200×1000; 2、工作台移动尺寸: X×Y=125×100;160×125;200×160; 250×200;400×320;500×400;800×600; 1000×800 3、夹具和工件总重:400N;500N;600N;800N; 1000N;1200N;1500N;1800N
成绩评定
1、课程设计、综合设计的成绩评定应以学生 独立完成工作任务的情况、成果的水平、独立 工作能力和创新精神、工作态度和工作作风为 依据。 2、课程设计、综合设计的成绩采用五级计 分:优秀、良好、中等、及格、不及格。
评分标准
(1)优秀:能圆满完成任务书所规定的各项任务, 对所研究的问题分析、计算、论证能力强,在某些方 面有一定的独到见解;说明书、图纸规范,质量高; 完成的软硬件达到或高于规定的性能指标;语言简 洁、准确、流畅,文档齐全,书写规范。 (2)良好:能完成任务书所规定的各项任务,对所 研究的问题分析、计算、论证能力较强,某些见解有 一定新意;说明书、图纸符合规范,质量较高;完成 的软、硬件基本达到规定的性能指标;语言准确、流 畅,文档齐全,书写规范。
4、切削负载:
X向200N;300N;400N;500N;600N;
800N;1000N;1200N Y向300N;400N;500N;600N;700N; 1000N;1200N;1400N Z向400N;500N;600N;700N;800N; 1200N;1500N;1800N
5、最高运行速度: 步进电机运行方式: 空载:1m/min; 切削:0.6m/min; 交流伺服电机运行方式: 空载:15m/min;切削:6m/min; 6、系统分辨率: 开环模式0.01mm/step; 半闭环模式 0.005mm/step; 7、系统定位精度: 开环模式±0.10mm; 半闭环模式 ±0.05mm
对学生的要求
1、学生根据任务书的要求,在教师指导下独立完成设计
任务。
2、在课程设计期间要严格遵守纪律,尊敬老师,爱护公 物,保证设计场所整洁、安静。 3、因事、因病不能参加课程设计,需履行请假手续,否 则按旷课处理。请假超过全过程三分之一或旷课超过全
过程四分之一者,其成绩为不及格。
4、严禁抄袭或找人代作,一经发现,其成绩为不及格。
工作进度安排
1、总体设计分析、确定方案、设计计算-------0.5周 2、机械部分结构设计、装配图绘制-------------1.0周
3、硬件电路设计-------------------------------------0.5周
4、撰写说明书------------------------------------------4天