转轴式注塑机合模机构设计
注塑机合模机构曲轴轴套的间隙配合设计调整研究

注塑机合模机构曲轴轴套的间隙配合设计调整研究摘要:注塑机合模机构曲轴轴套与锁轴之间的间隙配合设计非常特殊,需考虑注塑机实际工况的特殊性及装配工艺特性、不同材质的内孔收缩量以及不同的润滑介质所产生的影响等因素。
特别是轴套材质和润滑介质的更换对设计轴套的内径公差需有一定程度的调整,因在相同的负载和润滑工况下,不同材质的压入装配收缩率不一样,势必会影响润滑油膜形成的厚度。
同样不同的润滑介质所要求的最佳润滑膜厚度也不同,从而对轴套的间隙配合提出修正要求,设计优劣对轴套的使用寿命会产生很大程度的影响。
本文从以上三各方面对注塑机合模机构曲轴轴套的间隙配合设计调整的相关内容进行论述,剖析具体的影响因素和间隙配合的推荐修正量,以期为实践提供有益的借鉴。
关键词:注塑机;曲轴轴套;间隙配合;设计调整前言:合模机构是注塑机的重要部件之一,而曲轴旋转部分轴套与锁轴的间隙配合的设计优劣直接影响合模机构的整体性能及使用寿命。
轴套在整个开合模动作周期内承受较大的周期性变动负荷。
与固定负荷轴套不同,变负荷轴套工作时锁轴与轴套接触位置随轴套负荷的不同而不断变化。
接触位置的不断变化(旋转运动)使得轴套的承载力也成为一个变值,轴套承载力与轴套间隙、润滑油膜厚度、润滑粘度和轴套载荷有关。
而不同材质的轴套其承载形变量是不同的,尽管可以通过不同的工艺热处理得到微量矫正,但实验数据表明,恰当的间隙配合是决定不同材质轴套工作性能和寿命的主要因数。
同样,不同的润滑介质所需求的最佳油膜厚度也有差异。
因此,研究多种因素影响下的轴套间隙配合设计调整,对于保证合模机构正常工作是很有必要的。
1.轴套的特定运动载荷及装配工艺对间隙配合的调整分析以注塑机移动模板支铰轴套为例,注塑机合模尾部的合模油缸通过连杆机构来推动移动模板,从而达到锁紧模具的作用。
注射结束后再次通过合模油缸反拉来拉开移动模板,移动模板的前后移动依靠模板支铰轴套的旋转通过拉杆导向来实现,高压锁模时整个机器的合模反作用力分布在移动模板上的旋转轴套上,如图1所示。
注塑机合模参数设置参考说明

注塑机合模参数设置参考说明锁模结构:双曲肘五铰链斜排内卷式,合模动作位置切换控制:电子尺一.开始合模:1、开始合模压力:初设置值参考为25,当此压力过小而导致速度过慢时,可尝试增加速度,此压力过小,而使速度无法提高至需要时速度每次加+5尝试,注意,该压力设置较大时,会使动模板瞬间加高压改变静止状态变运动,至使动模板孔与拉杆产生巨大的摩擦力,久之加快了机器动模板孔与拉杆的磨损,影响到动模板运动的平稳性与精密度的下降,可能影响到个别对合模机构的精密要求较高模具的生产。
2、开始合模速度:看实际,不过要注意动作不宜过快,该速度要与下一段合模动作具有连贯性的运动,而不是出现明显的停顿动作切换,最好是速度设置高,压力设置低,由压力控制速度。
二,低压合模:由低压低速推动模具,由需要安全保护的距离开始至模具完全闭合终止1、低压合模速度:看实际,速度要慢,过快的速度,就算有设置了低压,惯性运动仍然有巨大的撞击破坏力。
滑快位置偏移、顶针断出.....等出现意外硬障碍物时,而进入合模动作,在有效的低压慢度的合模保护参数条件之下,大大减小撞击的损伤。
其实可以这个速度为几十,然后不动它,再把压力开始调得很低比如5进行测试,以压力控制速度,再一步步加压至适合的合模保护速度。
2、低压合模压力:可以先把速度调得很高,压力调得很低例如5进行合模测试,因为压力低,就算速度设置很大,失去压力的支持,合模速度也不会很快的,以压力控制速度,在5的基础上,一点点往上加至理想的合模保护速度,以最低的压力合模。
3、低压合模开始位置:(即上一段合模终止位置)这个要根据模具大小与结构而设置大小差异较大的数值,一般为模具闭合前的5-20厘米之间,这个位置大家看着办。
很多人就是设置模具合得太近,就才开始用低压,应该提前得到低压保护的距离受到上一段较大压力速度冲击合模,滑快位置偏移、顶针断出......等出现意外硬障碍物时,快猛撞击,这时低压保护无效,来迟了,(重点核心).....4、低压合模终止位置(即高压锁模开始位置):此参数为模具刚好刚完全闭合的位置,即动模板前进已经到尽头停止了,调试时先调好低压压力和速度,再将位置设置为0,关门手动合模测试得出一个低压合模完全闭合位置数值,比如这个数值是2.2,这个数值的大小受电子尺设置调整、调模松紧、合模压力大小影响,并且这个数值会受到机器精度和模具表面细小杂物的影响等原因影响,每次合模可能会有小小变动,所以要将终止位置设置稍大一点点比如加0.2设置为2.4(参考加0.1-0.3),以最低的位置,精确保护模具,如果不把低压合模测试获得的位置数值设置大一点点的话,直接就用2.2,可能经常会出现低压合模位置大于2.2,低压位置结束不了而无法转到高压锁模。
注塑模具结构及设计-5(导向_定位_顶出_复位)
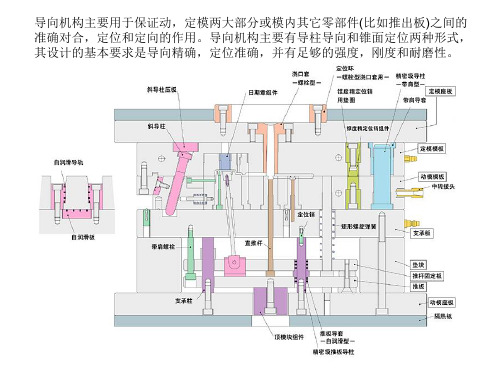
3,导柱的端部通常设计成锥形或半球形,以便导柱顺利进入导向孔。
导柱的端部分别为锥形,半球形,R角,斜角
4,导柱与导向孔通常采用间隙配合,导柱与安装孔通常采用过渡配合。
5,导柱的固定形式 普通导柱的固定形式:
推板导柱的两端都要固定,这样才能 更好的起导向作用。
挂台固定 (通孔)
螺钉固定(盲孔) 导柱配合面研伤更换 时可避免损坏固定孔
定位: 1,在模架上通常增加一些精定位来帮助动, 定模之间更准确的定位。这些精定位的位置 选择要注意关于中心对称,以使受力平衡。 定模 动模
右边为常用的几种 精定位形式(圆锥 面定位型,侧面安 装无锥度型,嵌入 安装锥面定位型)
2,在动,定模芯之间,为了达到更好的定位效果,防止动,定模芯之 间错位,需要增设定位。 动模定位 定模定位
定位到型腔边的距离不 等可能定位效果不理想
4,侧向受力不均匀的 塑件对模具往往有较 大的侧向力,该压力 可能引起型芯和型腔 的偏移,如果传递到 导柱上,将使导柱发 生卡住或损坏的现象, 需要采用定位的形式。
5,有些分型面坡 度过大,合模时受 力不平衡,为了抵 消这些不平衡力, 防止动,定模之间 错位,要设置定位。
动,定模合在一起
定位需带有斜度,合上之后没有间隙
动定模错位导致壁厚不均匀 3,对于成型大型深腔, 高精度或薄壁制品的模具, 型腔可能因为受到大的侧 向压力而向外变形,为消 除动定模之间的断差确保 壁厚均匀需要设置定位。
定 模 涨 开 导 致 动 定 模 之 间 断 差
大型腔或要求壁厚均匀的薄壁塑件的分型面上设置的 定位要随着型腔的外形走
推管顶出后
推管与推管芯的通常固定形式:
3,推块
推块可以有效的增加顶出面积
合模装置的设计1

3合模装置的设计合模装置是注塑机的一个重要部分,它的主要任务是提高足够的合模力,在注射时,使模具锁紧可靠。
同时,在规定的时间内以一定的速度实现模具的启闭动作,顶出制品。
它的结构和性能的好坏不仅直接影响着加工制品的质量,同时也决定着机器生产率的高低。
一个良好的合模装置应满足一下几个要求:1 应有足够的合模力,保证模具在模腔压力的作用下不沿分型面胀开,以免制品形成飞边,影响制品精度。
2 应有足够大的模板面积,模板行程和模板间距以适应不同形状和尺寸的制品的成型要求。
3 应有一定的模板运行速度。
合模时先快后慢,开模时先慢后快再慢,以满足制品的成型要求。
4 应有制品和模板间距调节装置以及安全保护装置。
5 结构尽量简单,便于制造和维修。
合模装置主要由固定模板、活动模板、拉杆、液压缸、肘杆以及调模装置和制品顶出机构等组成。
由于合模机构对注塑机的性能起着至关重要的影响,人们一直对合模机构进行着不断的研究和探索,力求设计出合模力大、运行速度快、耗能低、安全可靠又结构简单的合模装置。
有些学者提出了较符合实际的多目标函数和考虑实际约束条件的理论模型,来对合模机构进行优化设计和研究,并取得了一定的成果。
目前,注塑机上所使用的合模装置从结构上大体可分为液压式和液压肘杆式两大类。
液压式合模机构装置是依靠液体的压力直接锁紧模具,当液体压力解除后,合模力也随之消失,它是以简单的往复运动来实现模具的启闭动作。
目前,液压合模装置主要有单杠直压式、冲压式、充液式和特殊液压式。
液压——曲肘合模机构由液压系统和曲肘机构两部分组成。
它是利用肘杆机构在油压作用下使合模系统产生变形而锁紧模具。
其最大特点是具有自锁作用,即当模具锁紧后,油压撤除,合模力也不会消失,且运动特性也符合开、合模的要求。
3.1 合模装置工作过程中的特性在对合模装置的三个基本要求中(力、速度、位置和行程空间),显然,力是最主要的。
因此,根据液压式和肘杆式两种合模装置的工作原来,首先,讨论一下在力学方面所具有的一些特性。
课设设计任务书-注塑机合模系统结构设计
广东工业大学课程设计任务书题目名称注塑机合模系统结构设计学生学院材料与能源学院专业班级材料成型及控制工程材加11(2)班姓名学号一、课程设计的内容《成型设备课程设计》的设计内容是设计注塑机的合模系统,可采用液压合模系统或液压-双曲肘合模系统,要求能实现模具的开启、闭合和锁紧功能。
设计注塑机合模系统的机械结构,包括其安装位置、结构形状,对关键零件进行强度校核,绘制机械结构原理图,撰写设计说明书。
具体工作量按第三点执行。
二、课程设计的要求与数据1.在规定时间内独立完成自己的设计任务;2.及时了解有关资料,作好准备工作,充分发挥自己的创造性;3.要求计算准确,结构合理,图面整洁,图样和标注符合国家标准;4.设计说明书要求表达清楚,句子流畅,书写工整,插图清晰整齐。
三、课程设计应完成的工作1. 对任务书指定的题目进行动作分析,制定总体工作方案;2.设计合模系统的机械结构,对关键零件进行强度校核;3.采用合适的图纸,绘制合模系统的结构原理图;4.撰写设计计算说明书,按学校毕业设计说明书规定格式编写并装订成册(A4纸约20页)。
四、课程设计进程安排五、应收集的资料及主要参考文献[1]成大先主编.机械设计手册. [M].北京:化学工业出版社,2008.04[2]吴宗泽主编.机械零件设计手册.[M].北京:机械工业出版社,2004.455-488,818-869[3] 王三民编著.机械设计计算手册.[M].北京:化学工业出版社,2012.07[4] 成大先主编.机械设计手册液压传动单行本.[M].北京:化学工业出版社,2010.1[5] 李绍炎主编.自动机与自动线.[M].北京:清华大学出版社,2010.2[6] 北京化工学院、华南理工学院合编.塑料机械设计.[M].北京:轻工业出版社,1990.发出任务书日期:2014年 6月14日指导教师签名:张婧婧计划完成日期:2014年 6 月27日基层教学单位责任人签章:陈绮丽主管院长签章:肖小亭。
塑料成型机合模机构的优化设计

12目标函数目标函数是用来评价一个机械设计方案优劣的标准任何一项机械设计方案的好坏都可以用一些设计指标来衡量这些设计指标可表示为设计变量的函数用来使设计得以优化的函数就称作目标函数记作f13约束条件一个可行设计必须满足某些设计限制条件这些限制条件称注塑机合模机构的优化设计21合模机构原理五孔直排式双曲肘合模机构是注射成型机中应用最早最为广泛的肘杆式合模机构之一按合模过程连杆的运动形式有内翻式外翻式
注塑机的合模系统
THANK YOU FOR WATCHING
液压式合模系统是依靠液压力推动柱塞作往复运动来实现启闭和锁模。 (1)优点:动定模开距大,使成型制品的高度范围大;动模板可在行程范围内 任意停留,使模具的厚度、合模速度和合模力的大小调整方便;运动部件有自 润滑作用,磨损小. (2)缺点:系统复杂且易产生液压油的渗漏,使工作油压不稳定增长而导致合 模力的稳定性差;管路、阀件等的维修工作量大;还须设防止超行程安全装置。
03 合模系统的技术参数
模具厚度
模具厚度是指动模板与前模之间装模的最小模具厚度(Hmin)和最大模具 厚度(Hmax),二者之差(Hmax一Hmin)为最大调模厚度(∆S),由调模装置来完成, 是模具选择的重要参数。
(a)
(b)
制品脱模结构示图:(a)闭模;(b)合模 1─ 动模板;2─ 动模;3─ 定模;4─ 前模板;5─ 制品;6─
若选用注射成型机的锁模力不够,在成型时易使制品产生飞边,不能成 型薄壁制品;若锁模力选用过大,容易压坏模具,使制品内应力增大和造成不必 要的浪费。因此,锁模力是保证塑料制品质量的重要条件。
03 合模系统的技术参数
模板尺寸和拉杆间距
模板尺寸和拉杆间距均表示模具安装面积的主要参数。模板尺寸决定注 射成型用模具的长度和宽度,它应能安装上制品质量不超过注塑机注射量的一般 制品的模具,并能用常规方法将模具安装到模板上。
04
合模系统的 技术参数
03 合模系统的技术参数
锁模力
锁模力是指注塑机合模机构施于模具上的最大夹紧力,用于保证模具不 应被熔料所顶开。它在一定程度上反映出注射成型机所能加工制品的大小,常采 用最大锁模力作为注塑机的规格标称。
当熔料以一定速度和压力注入模腔前,需克服流经 喷嘴、流道、浇口等处的阻力,会损失一部分压力。但熔料 熔料 在充模时还具有相当高的压力,此压力称为模腔内的熔料压 力,简称模腔压力,模腔压力在注射时形成的胀模力将会使 模具顶开。为保证制品符合精度要求,合模系统必须有足够 的锁模力来锁紧模具。
注塑机合模装置的结构及发展

注塑机合模装置的结构及发展摘要:锁模装置作为注塑机最重要的组成部分,直接影响注塑制品的尺寸精度、品质。
到目前为止,对注塑机尤其是大型注塑机的合模机构的结构优化设计方面却仍有不足,当前锁模装置主要存在以下问题:模板平衡度不好导致的拉杆受力不均、锁模力不稳、动模板的运动控制精度不高,模板肘杆机构的速度传动比达不到运动性能要求而出现的高压开模时的突跳、卡死现象。
关键词:注塑机;合模装置;结构;发展1注塑机的概况1.1注塑机的运行原理注塑机被普遍运用在汽车、家用电器、家具等工业生产中,它对塑料成型这一生产技术领域起到了巨大影响,通过注塑机制造的商品拥有相同性高、样式多样、生产数量大、效率高和消耗能源较低等方面的优点,拥有很大的发展空间,注塑机的主要功能是把热固塑料和热塑塑料通过高温,在相应的压力下使加热的塑料液体进入模具中,然后通过冷却固化制造出拥有指定几何样式和标准的塑料商品的成型机械,注塑机通常都处在温度高、速度快、压力大的工况下运行,塑料在高温的形态时会产生对生物有害的气体和易爆性气体,因此对注塑机的安全要求比较严格。
1.2注塑机的构造注塑机的构造是由机械、液压和电气三个部分组成,其中机械主要由调模结构、锁模结构、注射部分组成;液压主要是由液压站和控制油路的阀门组成,电气是注塑机的控制部分,它可以操作注塑机进行多种多样的动作,让机械设备可以依据设置的步骤进行压力、速度、位置变换等机械动作,控制设备和液压设备的共同操作,能够使注塑机的运行实行准确的操作,随着计算机网络技术的广泛应用,目前很多注塑机普遍运用了计算机监控设备,有的注塑机有故障查找装置、模具低压保护装置、电力数据分析仪以及自动上料装置等,先进的科学技术应用到注塑机设备中,进一步完善了注塑机的功能。
2肘杆式2.1液压-机械式液压-机械式合模装置根据常用的肘杆类型和组成合模机构的曲肘个数,可将肘杆式合模装置分为单曲肘、双曲肘、曲肘撑板式以及其它特殊型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计说明书题目转轴式注塑机合模部分结构设计专业机械设计制造及其自动化学生姓名陈荣平学号091280405指导教师常秋香目录摘要 (Ⅰ)第一章引言 (1)1.1注塑机整机的工作原理 (1)1.2注塑机的结构组成 (2)第二章合模机构方案设计 (4)2.1.合模机构的类型和选择 (4)2.2.液压肘杆式合模机构的常见形式和选择 (6)2.3.合模机构的参数和尺寸计算 (7)2.3.1合模力的确定 (7)2.3.2模板尺寸及拉杆间距 (8)2.3.3动模板行程Sm (9)2.4肘杆机构的尺寸参数确定 (10)2.4.1运动特性分析 (11)2.4.2力学特性分析 (12)2.4.3肘杆机构自锁及正常运动条件 (14)2.4.4肘杆机构的速度分析 (14)2.4.5肘杆机构的尺寸参数确定 (18)2.5具体速度和加速度分析 (20)第三章内翻式合模机构机械结构设计 (25)3.1合摸机构装配图和主要的零件设计图 (25)3.2肘杆机构的强度校核 (25)3.3铰轴的剪切强度校核 (25)3.4注塑机的调模机构 (26)第四章注塑机的液压系统 (27)第五章其它机构 (30)5.1注塑机的机械保险装置 (30)5.2注塑机的注射装置 (30)5.2.1.注塑机的注塑油缸数类型的选择与确定 (30)5.2.2.注塑机的注塑装置的其他部件 (31)参考文献 (32)总结 (33)摘要注塑机关键是合模机构部分。
合模机构是注塑机最重要的机械部件,注塑机的合模机构形式很多,常用的机构主要可分三种:全液压式,液压-机械式,电子机械式。
液压机械合模机构是目前使用最为普遍的合模机构。
液压机械合模机构通常有移模液压缸和曲肘连杆两部分串联而成,习惯上也称为肘杆式合模机构。
在开合模过程中,这种机构能实现慢-快-慢的运动过程,提高了合模速度,节约了能耗并提高了效率。
关键词:合模机构;双曲肘;开合模;液压AbstractCritical of the injection molding machine is part of the clamping mechanism. The clamping mechanism is the most important mechanical components of the injection molding machine. Many institutions in the form of injection molding machine clamping, Common institutions mainly divided into three: Fully hydraulic, Hydraulics – Mechanical, Electronic mechanical. Hydraulic mechanical clamping mechanism is the most widely used clamping mechanism. Hydraulic and mechanical clamping mechanism is usually a two-part series of the hydraulic cylinder and toggle rod shift mode. The habits also called on the toggle clamping mechanism. In the process of opening and closing mold. Such institutions can be slow - fast - slow movement, Clamping speed, energy savings and improved efficiency.Keywords: Clamping mechanism; Double-toggle; Open-Die; Hydraulic pressure第一章引言塑料工业是国民经济重要工业部门,又是一个新兴的综合性很强的工业体系,这在很大程度上涉及到塑料加工的设备的先进与否。
所以为塑料制品行业提供加工装备的塑料机械行业,近几年发展迅速,其发展速度与所创主要经济指标在机械工业的194个行业中名列前茅。
塑料机械年制造能力约20万台(套),门类齐全,在世界排名第一。
而在众多塑料加工设备中,塑料成型加工设备是重点,主要有注塑机、挤出机、中空吹塑成型机及其辅助设备。
在成型加工中,注塑占重要位置,其设备是注射成型机,又称注塑机。
注塑成型的特点是:可一次成型外形复杂、尺寸精确、表面光泽的塑料制件;模具可以快速更换,以便制造适应市场需求的产品;特别适宜工程塑料及特种塑料的成型,获得有特殊性能、特殊用途的制品等。
合模机构是注塑机的重要部件之一,因为合模机构提供的锁模力最终决定于模具模腔的平均压力,而模具模腔的平均压力的决定了制品的产品质量。
现在,随着塑料的品种的日益丰富,性能越来越多样性和优越性,以及现在社会对塑料制品的需求量不断上升,且需求品种也越来越多样性。
合模力从超小型的200kN到超大型的大于20000kN,几乎包含了社会生产生活中的各个领域。
但平常用的最多的,较常见的是小型机。
1.1注塑机整机的工作原理注塑机利用塑料的热物理性质,把物料从料斗加入料筒中,料筒外由加热圈加热,使物料熔融;在料筒内装有在外动力马达作用下驱动旋转的螺杆,物料在螺杆的作用下,沿着螺槽向前输送并压实,物料在外加热和螺杆剪切的双重作用下逐渐地塑化,熔融和均化,当螺杆旋转时,物料在螺槽摩擦力及剪切力的作用下,把已熔融的物料推到螺杆的头部,与此同时,螺杆在物料的反作用下后退,使螺杆头部形成储料空间,完成塑化过程;然后,螺杆在注射油缸的活塞推力的作用下,以高速、高压,将储料室内的熔融料通过喷嘴注射到模具的型腔中;型腔中的熔料经过保压、冷却、固化定型后,模具在合模机构的作用下,开启模具,并通过顶出装置把定型好的制品从模具顶出落下。
通俗点来说,注塑机的工作原理与打针用的注射器相似,其借助螺杆的推力,将已塑化好的熔融状态的塑料注射入模腔内,经固化定型后取得制品的工艺过程。
注塑机作业循环流程如图1-1所示。
其中制品冷却与螺杆塑化是同时进行的。
图1-1 注塑机工作程序框图1.2注塑机的结构组成注塑成型机主要由合模部件、注射部件、液压系统、控制系统、机身、加热系统、加料装置等组成。
如图1-2所示。
图1-2注塑机组成示意图由图1-2可大致地看到注塑机是一个机电一体化程度很高的设备,其中合模性能对提高制品质量、提高生产效率有重要影响。
本文主要从合模部件、注射部件、液压系统和控制系统这四个方面展开具体的结构分析和有关参数确定。
1.3 合模装置配套的注塑机机型随着塑料的性能和可塑性的提高,以及近年来,随着医疗器械以及电子产品消费的不断增长,产品的更新换代越来越快,塑料制品的生命周期因此也变得越来越短,导致小型注塑成型制品的需求逐年增加,因而生产这些制品的小型注射成型机也引起了人们的广泛关注。
基于这一点,本注塑机主要用于生产食品包装、电子产品包装、商用机器壳体以及医疗器械等制品。
根据上述制品相关性能的要求,比如电子产品包装和医疗器械都应该具备优良的各项性能。
故选择PVC(聚氯乙烯,白色粉末,其力学性能、化学性能、电性能、阻燃性优良,密度 1.383g cm)作为制品注塑用料。
根据聚氯乙烯的成型性能确定其注塑工艺条件,如表1-1所示。
表1-1根据用途和制品塑料品种,该注塑机注塑多类形状的制品,要求能方便地更换模具,且制品尺寸较小(最大180mm×180mm),质量较轻,属于日常用品,小型机便能达到要求,故选择卧式螺杆式注塑机。
其特点是注射总成的中心线与合模总成的中心线同心或一致,并平行于安装地面。
它的优点是重心低、工作平稳、模具安装、操作及维修均较方便,模具开档大,占用空间高度小。
第二章合摸机构的方案设计2.1 合模机构的类型和选择合模机构是注塑机的重要部件之一,其功能是实现启闭运动,使模具闭合产生系统弹性变形达到锁模力,将模具锁紧。
对于一个比较好的合模机构应该具备三个方面的特性:1)足够的锁模力和系统刚性,保证模具在熔料压力作用下,不会产生开缝溢料现象;2)模板要有足够的模具安装空间及模具开启行程;3)快速的移模速度及较慢的合紧模具速度,移模时要具备慢-快-慢的运动特性。
现按锁模力的实现方式讨论全液压式、液压肘杆式和电动式合模机构的优缺点。
(1)全液压式全液压式合模机构可分为直动式、增压式和充液式。
1)直动式合模机构。
其特点是启闭模动作和合模力的产生都由合模油缸直接完成,这是一种非常简单的合模机构。
合模机构的合模动作由液压油作用在活塞上来实现,锁模动作由液压油升压来完成。
这种合模机构不满足合模机构的运动特性,耗能大,精度低,目前已经很少应用。
2)增压式合模机构。
由合模油缸、充液阀、稳压油缸和增压缸组成。
此类合模机构的锁模力受液压系统和密封的限制,固增压有限,主要用于中小型注塑机。
3)充液式合模机构。
这种开合方式模精度高、模板受力均衡、不需调模、不需加油润滑、磨损较少、开合模行程长;但容易内泄造成升压时间长、爬行、甚至让模、速度慢、漏油、能耗高、容易造成液压冲压、液压系统复杂、成本高、大油缸加工困难。
(2)液压肘杆式液压肘杆式合模机构由移模液压缸和曲肘连杆两部分串联而成,是通过液压系统驱动曲肘连杆机构来实现模具的启闭和锁紧。
它可以用很小的液压缸推力,通过肘杆机构的力的放大作用来获得较大的锁模力。
在开合模过程中,这种机构能实现慢-快-慢的运动过程,提高了合模速度,节约了能耗并提高了效率。
在输入功率相同的情况下,肘杆式合模机构的运动速度优于其它形式的合模机构,如在相同的尺寸和运动速度下,肘杆式合模的输入功率比全液压式约节省10%-20%。
另外,肘杆式合模机构的开模力通常是有限的,这一点在小吨位机器上更为明显。
液压肘杆式是目前使用最为普遍的合模机构。
但这种方式不足的是:1)结构复杂、易磨损、开合模精度差;2)加工精度要求极高,在成型过程中使得模板受力不均,不能成型精密产品;需要复杂的调模结构和润滑系统,开合模行程短,而且销轴等磨损后造成的受力不均,会加速机器损坏,例如:销轴和拉杆断裂、模板开裂、调模螺母咬死等。
(3)电动式电动式合模机构指用电机作动力源来驱动模版移动而实现合模、锁模的合模机构。
目前,较流行的是全电动肘杆式即所谓电动机械式合模机构。
全电动肘杆式合模机构使用伺服电机配以滚珠丝杠、齿形带等元件替代液压系统驱动曲肘连杆机构来实现模具的启闭和锁紧,整个装置的调模、顶出均采用伺服电机来执行的合模机构。