雷达系统(第2章)雷达信号检测
合集下载
第2章雷达基本组成PPT课件

第二章 雷达基本组成
§2.1 发射机 §2.2 接收机 §2.3 天线 §2.4 显示器
第1页/共39页
§2.1 发射机
• 功能 • 产生载波受调制的某一功率(通常是大功率)射频信号,再经馈线和收发开关由天线辐射出去。 • 一般分为连续波发射机和脉冲发射机,最常用的是脉冲雷达发射机。 • 通常是雷达系统中最重、最费钱的一部分。
• 关于发射机的进一步说明 • 大功率:不同雷达功率量级不同 • 脉冲雷达,峰值功率可达KW,MW, • 连续波雷达,几十瓦,几瓦就相当大了 • 思考一:为什么如此大功率? • 思考二:为何通常采用脉冲工作方式?
第5页/共39页
§2.1 发射机
• 一、发射机主要质量指标
• 1、工作频率、波段
• 雷达频率确定是极其重要的工作,一定要根据用途和实际需要,一旦确定,即成为整个系统之基础, 不能轻易动摇(硬件完全确定)
• 优点:简单,经济,重量小
• 缺点:①频率稳定度差,难以形成复杂波形
•
②相继的射频脉冲之间不相参,不能用于脉冲多普勒雷达,脉冲压缩雷达
• 用途:简单脉冲波形,非相参雷达
• 米波采用超短波三极管,分米波采用微波三极管和磁控管,厘米波采用多腔磁控管,典型发射管为磁 控管)
第19页/共39页
§2.1 发射机
温度漂移、负载变化引起的频率拖曳效应、电子频移、调谐游移以及校淮误差等原因.难于达到高的 频率精度和稳定度。
第25页/共39页
§2.1 发射机
• 什么是相参性?(coherent)
• 描述一:指两个信号的相位之间存在着确定的关系。 • 描述二:信号从一个脉冲到下一个脉冲的相位具有一致性或连续性。 • 描述三:每个脉冲的第一个波前与前一个脉冲相同相位的最后一个波
§2.1 发射机 §2.2 接收机 §2.3 天线 §2.4 显示器
第1页/共39页
§2.1 发射机
• 功能 • 产生载波受调制的某一功率(通常是大功率)射频信号,再经馈线和收发开关由天线辐射出去。 • 一般分为连续波发射机和脉冲发射机,最常用的是脉冲雷达发射机。 • 通常是雷达系统中最重、最费钱的一部分。
• 关于发射机的进一步说明 • 大功率:不同雷达功率量级不同 • 脉冲雷达,峰值功率可达KW,MW, • 连续波雷达,几十瓦,几瓦就相当大了 • 思考一:为什么如此大功率? • 思考二:为何通常采用脉冲工作方式?
第5页/共39页
§2.1 发射机
• 一、发射机主要质量指标
• 1、工作频率、波段
• 雷达频率确定是极其重要的工作,一定要根据用途和实际需要,一旦确定,即成为整个系统之基础, 不能轻易动摇(硬件完全确定)
• 优点:简单,经济,重量小
• 缺点:①频率稳定度差,难以形成复杂波形
•
②相继的射频脉冲之间不相参,不能用于脉冲多普勒雷达,脉冲压缩雷达
• 用途:简单脉冲波形,非相参雷达
• 米波采用超短波三极管,分米波采用微波三极管和磁控管,厘米波采用多腔磁控管,典型发射管为磁 控管)
第19页/共39页
§2.1 发射机
温度漂移、负载变化引起的频率拖曳效应、电子频移、调谐游移以及校淮误差等原因.难于达到高的 频率精度和稳定度。
第25页/共39页
§2.1 发射机
• 什么是相参性?(coherent)
• 描述一:指两个信号的相位之间存在着确定的关系。 • 描述二:信号从一个脉冲到下一个脉冲的相位具有一致性或连续性。 • 描述三:每个脉冲的第一个波前与前一个脉冲相同相位的最后一个波
《雷达信号分析》课件
系统测试与性能评估
总结词
测试、性能
详细描述
该部分主要介绍了系统的测试方法和性能评估,包括测试环境、测试内容、测试结果等,并对系统的 性能进行了全面的评估,为后续的系统优化和改进提供了依据。
THANKS
[ 感谢观看 ]
总结词
军事侦查与目标识别是雷达信号处理的重要 应用领域之一,通过处理雷达回波信号,提 取目标特征,实现目标的快速、准确识别。
详细描述
雷达系统通过发射电磁波,遇到目标后反射 回来被接收,经过信号处理提取出目标的距 离、速度、方位等参数,以及目标的形状、 尺寸等特征。这些信息对于军事侦查和目标 识别具有重要意义,可以帮助指挥官做出快
CHAPTER 06
案例分析:某型雷达信号处理系统 设计
系统概述与需求分析
总结词
概述、需求
详细描述
该部分主要介绍了某型雷达信号处理系统的基本情况,包括系统功能、应用场 景等,并对系统的需求进行了详细的分析,为后续的系统设计提供了依据。
系统架构与模块设计
总结词
架构、模块
详细描述
该部分主要介绍了系统的整体架构和 各个模块的设计,包括信号输入、处 理、输出等模块,以及各模块之间的 连接和交互方式,为后续的系统实现 提供了基础。
小波变换
总结词
多尺度分析
详细描述
小波变换是一种多尺度、多分辨率的信号处理方法,适合分析非平稳信号。它能够同时 在时域和频域对信号进行分析,揭示信号在不同尺度上的特征,广泛应用于雷达信号的
降噪、目标识别和运动目标跟踪等领域。
神经网络算法
总结词
自适应算法
详细描述
神经网络算法是一种模拟人脑神经元工作方 式的自适应算法,能够通过学习自动提取输 入数据的内在规律和模式。在雷达信号处理 中,神经网络可以用于自动目标识别、干扰 抑制、高分辨成像等方面。
《雷达信号分析》课件

《雷达信号分析》 PPT课件
contents
目录
• 雷达信号概述 • 雷达信号处理基础 • 雷达信号处理算法 • 雷达信号处理系统设计 • 雷达信号处理技术前沿
01
雷达信号概述
雷达信号的定义
01
02
03
雷达信号
由雷达设备发射的电磁波 信号,用于探测、跟踪和 识别目标。
雷达信号的特性
具有特定的频率、波形和 发射方式,能够穿透不同 的介质和环境条件。
监视等操作。
雷达信号处理系统的性能评估
性能评估指标
包括系统稳定性、实时性、精度和可靠性等。
测试与验证
通过实际测试和模拟实验,对雷达信号处理系统的各项性能指标进行评估和验 证。
05
雷达信号处理技术前沿
雷达信号处理的智能化技术
总结词
雷达信号处理的智能化技术是当前研究的热点,通过人工智能和机器学习等方法,实现对雷达信号的自动分析和 处理,提高雷达的探测性能和目标识别能力。
详细描述
雷达信号处理的抗干扰技术包括频域滤波、时域滤波、极化滤波等多种方法。这些技术能够有效地滤 除干扰信号,提取出有用的目标信息,提高雷达的探测精度和可靠性。同时,抗干扰技术还能够降低 雷达系统的复杂性和成本,具有广泛的应用前景。
雷达信号处理的实时处理技术
总结词
实时处理技术是雷达信号处理的另一个 重要方向,通过高效的算法和硬件实现 ,实现对雷达信号的快速处理和分析。
中值滤波算法
将信号按大小排序,用中值代替异常值,适用于去除脉冲噪声。
卡尔曼滤波算法
利用状态方程和观测方程对信号进行最优估计,适用于跟踪和预 测。
雷达信号的压缩算法
离散余弦变换(DCT)
将信号从时域转换到频域,去除冗余信息,减小数据量。
contents
目录
• 雷达信号概述 • 雷达信号处理基础 • 雷达信号处理算法 • 雷达信号处理系统设计 • 雷达信号处理技术前沿
01
雷达信号概述
雷达信号的定义
01
02
03
雷达信号
由雷达设备发射的电磁波 信号,用于探测、跟踪和 识别目标。
雷达信号的特性
具有特定的频率、波形和 发射方式,能够穿透不同 的介质和环境条件。
监视等操作。
雷达信号处理系统的性能评估
性能评估指标
包括系统稳定性、实时性、精度和可靠性等。
测试与验证
通过实际测试和模拟实验,对雷达信号处理系统的各项性能指标进行评估和验 证。
05
雷达信号处理技术前沿
雷达信号处理的智能化技术
总结词
雷达信号处理的智能化技术是当前研究的热点,通过人工智能和机器学习等方法,实现对雷达信号的自动分析和 处理,提高雷达的探测性能和目标识别能力。
详细描述
雷达信号处理的抗干扰技术包括频域滤波、时域滤波、极化滤波等多种方法。这些技术能够有效地滤 除干扰信号,提取出有用的目标信息,提高雷达的探测精度和可靠性。同时,抗干扰技术还能够降低 雷达系统的复杂性和成本,具有广泛的应用前景。
雷达信号处理的实时处理技术
总结词
实时处理技术是雷达信号处理的另一个 重要方向,通过高效的算法和硬件实现 ,实现对雷达信号的快速处理和分析。
中值滤波算法
将信号按大小排序,用中值代替异常值,适用于去除脉冲噪声。
卡尔曼滤波算法
利用状态方程和观测方程对信号进行最优估计,适用于跟踪和预 测。
雷达信号的压缩算法
离散余弦变换(DCT)
将信号从时域转换到频域,去除冗余信息,减小数据量。
雷达原理_第二章-雷达发射机

离 散 型 寄生输出
3
4
从图中可以看出,存在两种类型的寄生输出:一类是离散的;另一类 是分布寄生输出,前者相应于信号的规律性不稳定,后者相应于信号 的随机性不稳定。
2:雷达发射机的主要质量指标
•对于离散型寄生输出
主副比 10 lg 离散型寄生谱: 信号谱的最大功率 寄生谱的最大功率
•对于分布型寄生输出
•
AM
•
FM
•
PM PM其实也是频率调制,只是调制时对频率 的控制精度更高,调制电路也较为复杂。
1:雷达发射机的任务和基本组成
• • • 数字调制: ASK FSK
•
•
PSK
OOK
1:雷达发射机的任务和基本组成
二、发射机的分类与组成
•单级振荡式发射机 •主振放大式发射机
1:雷达发射机的任务和基本组成
第二章 雷达发射机
提
纲
1.雷达发射机的任务和基本组成
2.雷达发射机的主要质量指标
3.单级振荡式和主振放大式发射机
4.固态发射机 5.脉冲调制器:提供合适的视频调制脉冲
1:雷达发射机的任务和基本组成
一、发射机的任务 二、发射机的分类与组
1:雷达发射机的任务和基本组成
一、发射机的任务 产生大功率的特定调制的电磁振荡即射频信 号。 对于常见的脉冲雷达,要求发射机产生具有 一定宽度、一定重复频率、一定波形的大功率射
耦合度:耦合端口与输入端口的功率比, 单位用dB。
隔离度:本振或信号泄露到其他端口的功率与原有功 率之比,单位dB。
1:雷达发射机的任务和基本组成
天线增益(dB):指天线将发射功率往某一指定方向集 中辐射的能力。一般把天线的最大辐射方向上的场强E与
雷达信号分析(第2章)信号分析基础
é1 1 ùú ê sa (t ) = 2x (t ) * d(t ) ê2 2 j pt úû ë
=
ò
¥
-¥
x (t )d(t - t )d t + j
1 ¥ x (t ) dt ò -¥ p t -t
ˆ(t ) = x (t ) + jx
其中
1 ¥ x (t ) 1 ˆ(t ) = ò x d t = x (t ) * p -¥ t - t pt
相位检波器 cos w0t 中频回波信号
sr (t ) = a(t ) cos éë w0t + f(t ) ùû
低通滤波
A/D
I
相干振荡器 900移相器 sin w0t 相位检波器 低通滤波 A/D
Q
尽管传统正交双通道处理是针对中频信号而言(尤其是对微波雷达),但随着 A/D 采样频率的提高, 为减少射频前端模拟器件引入的通道不一致性, 直接在射 频端进行 A/D 采样、数字处理的方案已逐渐成为可能,尤其适用于高频雷达情 形,即所谓的“软件雷达”。 设实窄带雷达信号为
信号集合:我们把具有某种共同性质的信号归为一个集合,称之为信号 集合,记为
S { x; P}
P xS
集合的映射:对于集合 S1中的每一个元,如果可以按某种规则使它与集 合 S 2 中的唯一的一个元相对应,就称这种对应为从 S1 到 S 2 的映射,记 为 f : S1 S 2 ,即
y 2 p f0t
其中 m(t ) 成为复包络,它是一个既包含振幅调制又包含相位调制的低通函数。 复数信号的优势: (1) 信噪比 3dB 的提高; (2) 消除盲相(MTI 时目标对消) ; (3) 区分 fd (脉冲多普勒雷达)
雷达复数信号的产生
=
ò
¥
-¥
x (t )d(t - t )d t + j
1 ¥ x (t ) dt ò -¥ p t -t
ˆ(t ) = x (t ) + jx
其中
1 ¥ x (t ) 1 ˆ(t ) = ò x d t = x (t ) * p -¥ t - t pt
相位检波器 cos w0t 中频回波信号
sr (t ) = a(t ) cos éë w0t + f(t ) ùû
低通滤波
A/D
I
相干振荡器 900移相器 sin w0t 相位检波器 低通滤波 A/D
Q
尽管传统正交双通道处理是针对中频信号而言(尤其是对微波雷达),但随着 A/D 采样频率的提高, 为减少射频前端模拟器件引入的通道不一致性, 直接在射 频端进行 A/D 采样、数字处理的方案已逐渐成为可能,尤其适用于高频雷达情 形,即所谓的“软件雷达”。 设实窄带雷达信号为
信号集合:我们把具有某种共同性质的信号归为一个集合,称之为信号 集合,记为
S { x; P}
P xS
集合的映射:对于集合 S1中的每一个元,如果可以按某种规则使它与集 合 S 2 中的唯一的一个元相对应,就称这种对应为从 S1 到 S 2 的映射,记 为 f : S1 S 2 ,即
y 2 p f0t
其中 m(t ) 成为复包络,它是一个既包含振幅调制又包含相位调制的低通函数。 复数信号的优势: (1) 信噪比 3dB 的提高; (2) 消除盲相(MTI 时目标对消) ; (3) 区分 fd (脉冲多普勒雷达)
雷达复数信号的产生
雷达信号测量原理
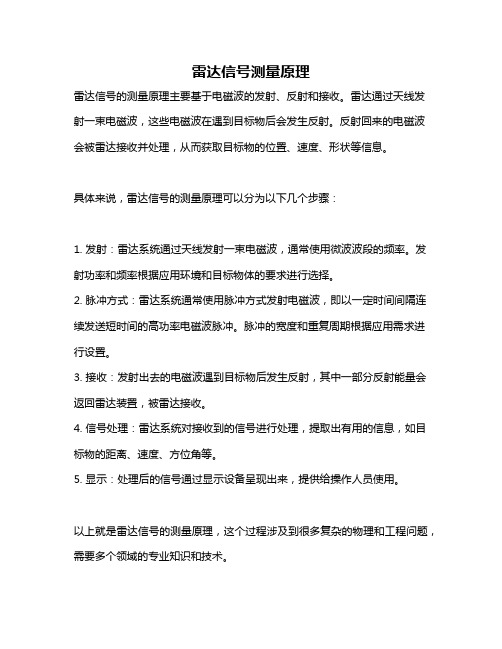
雷达信号测量原理
雷达信号的测量原理主要基于电磁波的发射、反射和接收。
雷达通过天线发射一束电磁波,这些电磁波在遇到目标物后会发生反射。
反射回来的电磁波会被雷达接收并处理,从而获取目标物的位置、速度、形状等信息。
具体来说,雷达信号的测量原理可以分为以下几个步骤:
1. 发射:雷达系统通过天线发射一束电磁波,通常使用微波波段的频率。
发射功率和频率根据应用环境和目标物体的要求进行选择。
2. 脉冲方式:雷达系统通常使用脉冲方式发射电磁波,即以一定时间间隔连续发送短时间的高功率电磁波脉冲。
脉冲的宽度和重复周期根据应用需求进行设置。
3. 接收:发射出去的电磁波遇到目标物后发生反射,其中一部分反射能量会返回雷达装置,被雷达接收。
4. 信号处理:雷达系统对接收到的信号进行处理,提取出有用的信息,如目标物的距离、速度、方位角等。
5. 显示:处理后的信号通过显示设备呈现出来,提供给操作人员使用。
以上就是雷达信号的测量原理,这个过程涉及到很多复杂的物理和工程问题,需要多个领域的专业知识和技术。
雷达信号分析与处理第一章第二章

s(t) S ( f )e j2 ftdf
S(W) 或 S(f) 存在的充分条件是 s(t) 绝对可积,即 s(t)dt
雷达信号分析与处1理3
第二章 雷达信号与线性处理系 统
在雷达工程术语中,时间函数 s(t)称为雷达信号的时间波形,频率函数 S(W) 或 S(f) 称为雷达信号的频谱密度或频谱。
s(t) S( f ) 表示信号s(t) 和其频谱S(f)
复数表示
s(t) s1(t) js2 (t) S( f ) R( f ) jI ( f )
e j2 ft cos(2 ft) j sin(2 ft)
s1(t)
R( f ) cos(2 ft) I ( f )sin(2 ft)df
雷达信号分析与处理6
第一章 绪论
雷达发明之前的防空:盲人雷达;光学测距仪
1935年,英国皇家物理研究所的沃森.瓦特博士进行无线电科学考察 荧光屏上的亮点 载重汽车上的第一台雷达 东海岸对空警戒雷达网
雷达信号分析与处理7
第一章 绪论
二 、雷达测量原理
Radar-- Radio detection and ranging(无线电探测和测距)
测距 测高 测速
三、雷达与通信信号区别 1电磁波频率;
3天线方向性;
5信号处理;
2传输目的; 4主要考虑方面;
雷达信号分析与处理8
第一章 绪论
1.2 研究雷达信号的目的和意义
一、雷达所面临的问题 四大威胁 电子干扰 (干扰机:压制式、欺骗式)
徘徊者EA-6B
低空突防(巡航导弹)
咆哮者EF-18G
新型运8电子干扰机
第一章 绪论
二、新型雷达 1.低截获概率雷达; 2.超宽带雷达; 3.稀疏布阵雷达; 4.无源雷达; 5.双/多基地雷达; 6.星载毫米波雷达; 7.雷达组网; 8.多域融合探测系统
(完整版)雷达原理(第三版)丁鹭飞第2章
第2章 雷达发射机 10 000
平 均 功率 /kW 功率 / MW
4 1000
100 3
10
5
2
100
4
微波管 PF 2 边 界
10
32
1
1.0
5
1
1
0.1
1
10
100 1000
频率/GHz
(a)
0.1
6
0.01 0.1
1.0
10 100
频率/GHz
(b)
螺线行波管
100
行波速调管
带宽(% )
耦合腔行波管 10
第2章 雷达发射机
第2章 雷达发射机
2.1 雷达发射机的任务和基本组成 2.2 雷达发射机的主要质量指标 2.3 单级振荡和主振放大式发射机 2.4 固态发射机 2.5 脉冲调制器
第2章 雷达发射机
2.1 雷达发射机的任务和基本组成
雷达是利用物体反射电磁波的特性来发现目标并确定目标 的距离、方位、高度和速度等参数的。因此, 雷达工作时要求 发射一种特定的大功率无线电信号。发射机在雷达中就是起这 一作用的, 也就是说, 它为雷达提供一个载波受到调制的大功率 射频信号, 经馈线和收发开关由天线辐射出去。
第2章 雷达发射机
对于分布性的寄生输出则以偏离载频若干赫的傅里叶频率
(以fm表之)上每单位频带的单边带功率与信号功率之比来衡量, 其单位以dB/Hz计。由于分布性寄生输出对于fm的分布是不均匀 的, 所以信号频谱纯度是fm的函数, 通常用L(fm)表示。假如测量 设备的有效带宽不是1 Hz而是ΔBHz, 那么所测得的分贝值与L(fm) 的关系可近似认为等于
电源、控制、 保护电路
预调器
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 g (t ) 2
IFT
S ( )H ( )e jt d
对1负载
2 g ( t ) So g (t0 ) 设 t t0 时, 输出为最大值 -> 最大输出信号功率:
5
2015-1-23
白噪声条件下的匹配滤波器
② 滤波器输出的平均白噪声功率:
什么是白噪声? 均值 为零,噪声功率谱密度为 N 0 2 。
n(t ) s (t )dt n(t )n(t )dt
Cs ( ) Csn ( ) Cns ( ) Cn ( ) Cx ( ) Cs ( ) Cn ( )
Cs ( ) 和 Cn ( ) 分别为信号、噪声的自相关函数 其中,
部同相相加,从而获得最大信号输出; 而噪声的各频率成分的相位是随机的,与滤波器的相频特性 之间无任何确定关系,不能同相相加。
11
So N o
2015-1-23
匹配滤波器的时域特性分析
匹配滤波器的冲激响应
1 h(t ) 2
H ( )e jt d
根据匹配滤波器频率响应 H ( ) KS * ( )e jt0,得: K * j ( t0 t ) h(t ) S ( ) e d 2
估值理论:精确测定回波参量方法
研究方法——数学统计方法
单次(个别)观察随机量结果不规则,而长期观察的 平均具有规律性
2
2015-1-23
第二章 雷达信号检测
2.1 匹配滤波与相关接收 2.2 雷达信号最佳检测 2.3 二进制积累 2.4 恒虚警率处理
3
2015-1-23
背景
雷达方程
Rmax PG t 3 (4 ) S min
N0 平均输出噪声功率为:N o 4
H ( ) d
2
③ 滤波器输出端信噪比 使峰值信号功率与平均噪声功率之比
g (t0 ) So No No
2
பைடு நூலகம்
1 2
2
S ( )H ( )e jt0 d
N0 4
6
H ( ) d
2
如何设计 H ( ) ,使So N o 最大? 匹配滤波器设计问题
17
2015-1-23
相关接收器
相关接收
机理:① 信号与信号间存在某种强的相关性 ② 信号与噪声间无此相关性 ③ 噪声与噪声间由于随机性也不存在强的相关性
相关函数
Cx ( ) x1 (t )x2 (t )dt
设二个为平稳随机过程的信号是 x1 (t ) 和 x2 (t ) ,其相关函数是: 若 x1 (t ) x2 (t ) ,C x ( ) 称为自相关函数 若 x1 (t ) x2 (t ) ,C x ( ) 称为互相关函数
H ( ) KS * ( )e jt0 ,即: 系统输出 So No max 的条件是: 匹配滤波器的频率响应函数是接收信号频谱的共轭,并 有一线性相位项。
当频谱结构相同,信号能量、时延不同时,系统输出满 足 So N o max准则,其差异仅是输出能量、时延不同。
16
2015-1-23
2 2 14
最小可检测信号功率
与接收SNR有关 (接收机发现目标所需SNR Rmax )
当 R 一定时,S N 检测能力
提高SNR的方法
① Pt 受限于功率管,传输系统功率承受能力
② 降低接收机噪声 取决于高频低噪声放大器的噪声系数 ③ 信号处理 匹配滤波等
匹配滤波器与信号形式有关 输出最大信噪比与信号能量有关,与信号 形式无关
8
2015-1-23
匹配滤波器的频率响应特性
匹配滤波器的传递函数
H ( ) KS * ( )e jt0
H ( ) e j ( )
S ( ) e j ( )
H ( ) e j ( ) K S ( ) e j ( )t0 幅频响应:H ( ) K S ( ) , K 为常数 K 0
匹配滤波器的性质
性质③
匹配滤波器对频移信号无适应性。
假设发射简单脉冲 x(t ) 1, 0 t t s ,其回波径向速度为 v m/s 。接收机解调后,回波波形(忽略总的时间延迟)为 x '(t ) x(t ) exp( j 2 f d t ) ,其中 f d 为多普勒频移。 若匹配滤波器满足 H ( ) KX * ( )e jt0 条件,那么因为: x(t ) X ( f ) ,x '(t ) X ( f f d ) ,显然 X ( f f d )与 H ( ) 不满足复共轭条件。
匹配滤波器的物理实现
系统冲激响应为 h(t ) 0,若 t 0 因果系统或可物理实现的系统 t0 设s(t ) 为时间有限实信号,且s(t ) 0 ,当 。 t ts
t 0 t0 t s 0 t 0 t s h(t ) 可因果实现 h(t ) 0,当 反折 通常取 t0 ts 即t 0大于等于信号长度就可以保证 h(t ) 是因果的
C sn ( ) 和Cns ( )分别为信号、噪声的互相关函数 19 2015-1-23 ) Cns ( ) 0 信号和噪声不相关 Csn (
自相关接收器
噪声的自相关函数
Cn ( ) n(t ) n(t ) dt
对平稳随机噪声而言,具有如下性质: ① C ( ) C (0) ② C( ) C( ) ③ 均值为 0,lim Cn ( ) 0
Cs ( tr ) Csn ( )
自相关 互相关
22
2015-1-23
互相关接收器
互相关器的实现框图
x(t ) s(t tr ) n(t )
延时
C12 ( tr )
门限
有 信号 无
发射机
互相关器
工作原理:
tr 2 R c 回波延迟时间, R 变,则 t r变。
幅频与信号幅度谱相同
( ) ( ) t0 相频响应:
相频是信号相位取反(共轭)并附加线性相位 时间的恒定延时
9
2015-1-23
匹配滤波器的频率响应特性
幅频响应特性
K 为常数 K 0 幅频响应:H ( ) K S ( ) ,
匹配滤波器幅频特性 = 信号幅频特性
则 C12 ( ) x1 (t )x2 (t ) dt 为其互相关( x1 (t ) x2 (t ) )
C12 ( ) x1 (t )x2 (t )dt
s(t tr ) n(t ) s(t ) dt
s(t tr ) s(t ) dt n(t ) s(t ) dt
2.1 匹配滤波与相关接收 2.2 雷达信号最佳检测 2.3 二进制积累 2.4 恒虚警率处理
1
2015-1-23
第二章 雷达信号检测
信号检测与估值理论研究背景
① 信号受传播、反射影响呈现的不规则性 ② 噪声和外来各种杂乱对信号的随机性干扰 检测理论:获取目标回波的最佳处理方法
前提 雷达信号的检测是雷达最基本的任务。
噪声相关时间比信号相关时间短得多。
相关器主要输出相关信号并保证高的信噪比。
20
2015-1-23
自相关接收器
自相关器的实现框图
Cx ( ) x1 (t )x2 (t )dt
自相关器
互相关器
21
2015-1-23
互相关接收器
x1 (t ) s(t tr ) n(t ) 接收机输出信号 若令 发射机复本(本地)信号 x2 (t ) s(t ) tr 2 R c 回波延迟时间
h(t ) K s* (t1 ) (t1 t0 t )dt1 K s * (t0 t )
匹配滤波器的冲激响应是输入信号s(t ) 镜像 s* (t ) 的共轭, 并有一个时延 t0 ,再乘上一个简单的增益常数 K 。
2015-1-23
可物理实现的匹配滤波器
只能完成对特定距离单元的目标检测
①信号s(t ) 发射同时被存储; ②当回波信号 x(t ) 到达时,二者进行相关运算(乘积、积分), 得到相关函数 C12 ( tr ) C12 ( tr ) max送去进行门限检测 ③当 tr 时,
2015-1-23
白噪声条件下的匹配滤波器
根据许瓦兹不等式: x( ) y ( )d x( ) d y ( ) d
2 2
* 当且仅当 x( ) Ky ( ) 时,取等号
2
g (t0 ) So No No
1 So 2 No
2
1 2
jt0 * 时,上式取等号 KS ( ) e
7
2015-1-23
白噪声条件下的匹配滤波器
当LTI系统的传递函数为H ( ) KS * ( )e jt0时,接收机输出 信噪比最大 匹配滤波器
So 2E 最大输出信噪比: N o max N 0
2
S ( )H ( )e jt0 d
N0 4
H ( ) d
d
2
信号能量
2
S ( )e N0 4
jt0 2