现代控制理论+2-3+系统的传递函数矩阵 (1)
现代控制理论第3章传递函数矩阵的结构特性
现代控制理论第3章传递函数矩阵的结构特性控制理论是现代科学技术的重要组成部分,它主要研究如何通过合理的方式对动力系统进行控制。
传递函数是控制理论中的一个重要概念,它是描述控制系统中输入和输出之间关系的数学模型。
在现代控制理论中,传递函数矩阵作为传递函数的扩展,是一种描述多输入多输出系统的数学模型,具有一些特殊的结构特性。
首先,传递函数矩阵的维度决定了系统的输入和输出的数量。
设系统的输入和输出分别为u和y,传递函数矩阵的维度为p×m,其中p是输出的数量,m是输入的数量。
这意味着系统的输出是由m个输入共同作用决定的,而系统的输出也会影响到m个输入。
传递函数矩阵的维度结构清晰明确,可以直观地反映系统的复杂性和耦合程度。
其次,传递函数矩阵可以通过分块矩阵的形式表示。
在传递函数矩阵中,每个元素都是一个标量传递函数,表示输入对应输出的单一影响。
将传递函数矩阵按照行和列的方式进行分块,可以更好地表示系统的结构和功能,方便进行系统分析和设计。
例如,可以将传递函数矩阵按照行进行分块,每个分块表示一个输出对所有输入的传递函数,即系统的局部传递函数。
这种分块的方式有助于分析系统的稳定性、可控性和可观性等性质。
第三,传递函数矩阵具有可乘性和可加性。
传递函数矩阵之间可以进行乘法和加法运算,得到的结果仍然是一个传递函数矩阵。
这使得系统的复杂行为可以通过简单的计算表达出来。
例如,两个传递函数矩阵相乘可以表示两个系统级联的结果,即一个系统的输出作为另一个系统的输入,从而形成一个新的系统。
传递函数矩阵的可乘性和可加性为系统分析和设计提供了便利。
最后,传递函数矩阵具有一些特殊结构,如分数阶传递函数矩阵和时滞传递函数矩阵等。
分数阶传递函数矩阵是一类常见的非整数阶动力系统的数学模型,广泛应用于控制系统、信号处理和通信系统等领域。
时滞传递函数矩阵描述的是系统的输入和输出之间存在一定的延迟,这在实际控制系统中是常见的现象。
对于这些特殊结构的传递函数矩阵,需要采用不同的方法进行分析和设计,以满足系统要求。
第1章 现代控制理论2

(b1 − a1b0 ) s n−1 + L + (bn − a n b0 ) Y ( s ) = b0U ( s ) + U ( s) n n−1 s + a1 s + L + a n
结论:1)系统矩阵A的特征多项式等于传递函数的分母多项式; 2)传递函数的极点就是系统矩阵A的特征值。
[例1-11]
已知系统状态空间表达式
& 1 x1 1 0 u1 x1 0 x = − 2 − 3 x + 1 1 u 2 2 &2 1 0 x1 y= x 试求其传递函数阵。 1 1 2 [解:] G(s) = C(sI - A) -1 B
& X 2 = A 2 X 2 + B 2U 2 设另一个系统为: Y 2 = C 2 X 2 + D 2U 2
简记为 ∑ 2 ( A2 B2C2 D2 ) ,其传递函数阵为: G 2 ( s ) = C 2 ( sI − A 2 ) − 1 B 2 + D 2 1. 并联
系统 ∑ 1和 ∑ 2 的并联由图可知U1=U2=U,Y=Y1+Y2 。 连接条件:U=U1 =U2, Y=Y1+Y2。 并联后系统的状态空间表达式为:
& X 1 A1 & X2 = 0
Y = [C1
0 X 1 B1 X 2 + B2 U A2
C 2 ] X 1 + [D1 + D2 ] U X2
2010-2011学年第二学期《现代控制理论》考试题A卷_参考答案

令
Z(s) =
1
, Y (s) = s2 + 8s +15
U (s) s3 + 7s2 +14s + 8 Z (s)
可得微分方程
z+ 7z+14z + 8z = u z+ 8z +15z =y
选择=x1 z= , x2 z= , x3 z, 则有
x1 = x2 x2 = x3 x3 =−8x1 −14x2 − 7x3 + u y = 15x1 + 8x2 + x3
于是得系统的可控标准型实现为
x1 0 1 0 x1 0
x1
= x2
0
0
1
x2
+
0 u,
y = [15
8
1]
x2
x3 −8 −14 −7 x3 1
x3
(2)可观测标准型实现 系统所对应的微分方程为
x2
= − 1 L
x1
−
R L
x2
+
1 L
u
,
y
=
uc
(3 分)
写成矢量矩阵形式为:
0
=x
−
1 L
1 C −R L
x
+
0 1 L
u
y = [1 0] x
二、(10 分)Consider the following state-space equation of a dynamic system
0
1]
现代控制原理2-3离散系统
−T −T
−T
)
−T
z 2 − (1 + e −T ) z + e −T
)
0 x( k + 1) = −T -e
0 x ( k ) + u( k ) −T 1+ e 1 1
y( k ) = 1 − e −T − Te − T
T − 1 + e −T x( k )
x(k+1) = [I +TA]x(k) + TBu(k) G = I +TA H =TB
17
0 1 0 & 的近似离散化方程。 例2-13 求 x = x + 1 u 的近似离散化方程。 0 −2
解: G = I + TA = 1 0 + 0 − T = 1 − T 0 1 0 − 2T 0 1 − 2T
x( k + 1) = G ( k ) x( k ) + H ( k )u( k ) y( k ) = C ( k ) x ( k ) + D( k )u( k )
2
2.结构图 2.结构图
3
3.差分方程和脉冲传递函数与离散状态空间表 3.差分方程和脉冲传递函数与离散状态空间表 达式之间的转换 在单变量离散系统中, 在单变量离散系统中,数学模型分为差分方程 和脉冲传递函数两类, 和脉冲传递函数两类,它们与离散状态空间表达式 之间的变换,和连续系统分析相类似。 之间的变换,和连续系统分析相类似。 离散 差分方程 连续 D.E
x1 ( k ) y ( k ) = [1 −4 ] + u( k ) x2 ( k )
现代控制理论课后习题答案

现代控制理论课后习题答案第⼀章习题1.2求下列多项式矩阵()s D 和()s N 的两个不同的gcrd:()2223(),()1232s s s s s s s s s ??++== ? ?+-??D N 解:()()22232321s s s s s s s++ =++ ? ?D S N S ; ()3r 2,1,2E -:223381s s s s s s ??++ ?-- ? ???;()3r 2,3,3E :223051s s s s s ??++ ?- ? ???;()3r 1,3,2E s --:01051s s ?? ?- ? ;()3r 2,1,5E s -:01001s ?? ?;()3r 3,1,1E -:01000s ?? ? ? ???;()1r 2,3E :01000s ?? ? ? ???;()1r 1,2E :00100s ?? ?;所以⼀个gcrd 为001s ??;取任⼀单模矩阵预制相乘即可得另⼀个gcrd 。
1.9 求转移矩阵t A e (1)已知1141??=A ,根据拉⽒反变换求解转移矩阵tA e 。
(2) 已知412102113-?? ?= ? ?-??A ,根据C-H 有限项展开法求解转移矩阵t A e 。
解:(1)11()41s s s --??-= ?--??I A1110.50.50.250.2511(3)(1)(3)(1)13131()4141110.50.5(3)(1)(3)(1)(3)(1)3131s s s s s s s s s s s s s s s s s s s s s s s --+---+-+??-+-+ ? ?-=== ? ?---+ ?-+ ? ?-+-+-+-+?I A 3311330.5e 0.5e 0.25e 0.25e e ()e e 0.5e 0.5e t t t t t t tt t s ------??+-??=-= ??? ?-+?A L I A (2)由2412()12(1)(3)0113λλλλλλ--?? ?=--=--= ? ?--??A I -,得1,233,1λλ== 对1,23λ=,可以计算1,2()2rank λ=A I -,所以该特征值的⼏何重数为1。
大连理工大学 现代控制理论 王金城 第三章 答案

第3章习题参考答案:3-1 (1)1101 0221rank[] 2 rank[]2c o c o ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦==Q Q Q Q 能控,能观测(2) 1979818100139155153 rank[] 3 201618139153c c ⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦Q Q 100210123 rank[] 33812913363550141o o ⎡⎤⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦Q Q 能控,能观测(3) 根据能控/能观测判别准则二知,系统能控,但不能观测 (4) 00()()1t t ⎡⎤==⎢⎥⎣⎦M b1001d()(t)()()d t t t t t -⎡⎤=-+=⎢⎥-⎣⎦M A M M [][][]010*******()() rank[]21()()01d()()()()0d ()01 rank[]2()0c c o o t t t t t t t t t t tt t t -⎡⎤===⎢⎥-⎣⎦===+=-⎡⎤⎡⎤==<⎢⎥⎢⎥⎣⎦⎣⎦Q M M Q N c N N A N N Q Q N能控但不能观测(5) 02()()t t e t t e --⎡⎤==⎢⎥⎣⎦M b1000d()(t)()()0d t t t t ⎡⎤=-+=⎢⎥⎣⎦M A M M[]0120100010()() rank[]20()()1d ()()()()13d ()1rank[]2()13tc c tt tt o o t e t t e t t e t t t t e tt e t e ------⎡⎤==<⎢⎥⎣⎦⎡⎤==⎣⎦⎡⎤=+=--⎣⎦⎡⎤⎡⎤==<⎢⎥⎢⎥--⎣⎦⎣⎦Q M M Q N c N N A N N Q Q N能观测但不能控3-2 (1) 矩阵A 为约当标准形,对应于唯一特征值12λ=-共有3个约当块。
系统完全能控的充要条件是矩阵B 中对应于三个约当小块的末行为行线性无关。
现代控制理论-传递矩阵
λi Pi = APi
称pi为特征向量。
4. 4 状态方程的线性变换
选取不同的状态变量有不同形式的状态方程, 两组状态变量之间存在着线性变换。
x& = Ax + bu y = cx
x = px
x& = Ax + bu y = cx
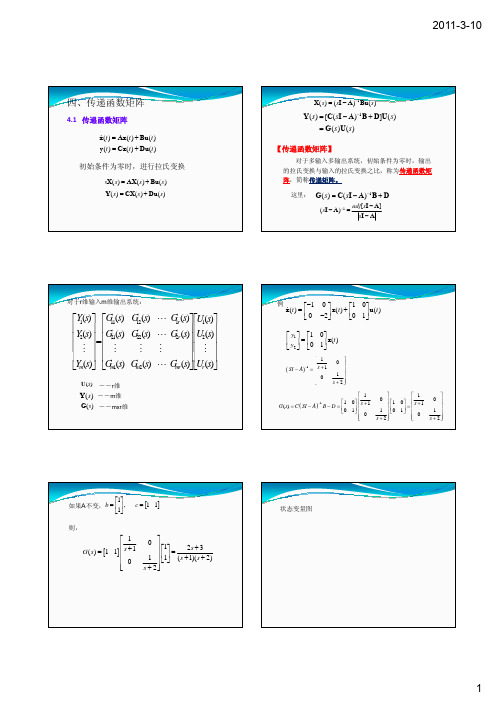
= G(s)U(s) 【传递函数矩阵】
对于多输入多输出系统,初始条件为零时,输出 的拉氏变换与输入的拉氏变换之比,称为传递函数矩 阵,简称传递矩阵。
这里: G(s) = C(sI − A)−1B + D
(sI − A)−1 = adj[sI − A] sI − A
对于r维输入m维输出系统:
⎡Y1(s)⎤ ⎡G11(s) G12(s) L G1r(s)⎤⎡U1(s)⎤
b) 若A阵为友矩阵,且有n个互不相同的实数特 征值λi
⎡0 1 0 L 0 ⎤
⎢ ⎢
0
01
⎥ ⎥
A=⎢ ⎢ ⎢
O
⎥
1
⎥ ⎥
⎢⎣−a0 −a1 L
−an−1 ⎥⎦
sI − A = 0
λi
3
2011-3-10
则下边的范德蒙特矩阵使A对角化
⎡1 1 L 1⎤
⎢ ⎢
λ1
λ2
L
λn
⎥ ⎥
P
=
⎢ ⎢ ⎢
λ12 M
P变换,
变换矩阵: p = [ p1 p2 L pn ]
x = px x& = px& = Ax + bu = Apx + bu
x& = p−1Apx + p−1bu = Ax + bu
现代控制理论习题解答(第三章)
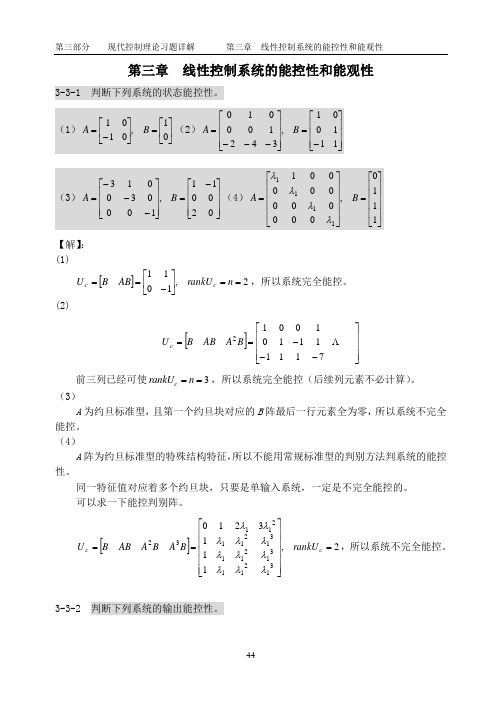
第三章 线性控制系统的能控性和能观性3-3-1 判断下列系统的状态能控性。
(1)⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-=01,0101B A (2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=111001,342100010B A (3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A (4)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1110,0000000011111B A λλλλ 【解】:(1)[]2,1011==⎥⎦⎤⎢⎣⎡-==n rankU AB BU c c ,所以系统完全能控。
(2)[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---==7111111010012B A ABBU c 前三列已经可使3==n rankU c ,所以系统完全能控(后续列元素不必计算)。
(3)A 为约旦标准型,且第一个约旦块对应的B 阵最后一行元素全为零,所以系统不完全能控。
(4)A 阵为约旦标准型的特殊结构特征,所以不能用常规标准型的判别方法判系统的能控性。
同一特征值对应着多个约旦块,只要是单输入系统,一定是不完全能控的。
可以求一下能控判别阵。
[]2,111321031211312113121121132=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡==c c rankU B A BA AB BU λλλλλλλλλλλ,所以系统不完全能控。
3-3-2 判断下列系统的输出能控性。
(1) ⎪⎪⎪⎩⎪⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=xy u x x 011101020011100030013 (2) []⎪⎪⎩⎪⎪⎨⎧=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=x y u x x 0011006116100010【解】: (1)已知⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A ,⎥⎦⎤⎢⎣⎡-=011101C ,⎥⎦⎤⎢⎣⎡=0000D []⎥⎦⎤⎢⎣⎡--=111300002B CA CAB CB D前两列已经使[]22==m B CA CAB CB D rank ,所以系统输出能控。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
解:
(sΙ − A )
−1
-1
G (s ) = C(sI − A ) B + D
1 1 0 s = 0 1 0
s s −1 = = 0 s + 2 0
s (s + 2 ) 1 s+2
1 1 s (s + 2 ) 1 0 = s 1 0 1 0 s+2
求传递函数矩阵 的表达式
A = [0 1; 0 -2]; B = [1 0; 0 1]; C= [1 0; 0 1]; D = 0; sys = ss(A,B,C,D) tf (sys)
返回
Transfer function from input 1 to output... 1 #1: s #2: 0 Transfer function from input 2 to output... 1 #1: --------s^2 + 2 s 1 ----s+2
1 0 1 x1 1 0 u1 x = + , x 2 0 − 2 x2 0 1 u2
1 s G (s ) = 0 1 s (s + 2 ) 1 s+2
y1 1 0 x1 y = 0 1 x 2 2
前页
一、定义及表达式
零初始条件下,输出向量的拉氏变换式与输入向量 的拉氏变换式之间的传递关系——传递函数矩阵。
(t ) = Ax(t ) + Bu(t ) ⇒ sX(s ) = AX(s ) + BU(s ) x y (t ) = Cx(t ) + Du(t ) ⇒ Y(s ) = CX(s ) + DU(s )
Yq (s ) = Gq1 (s )U1 (s ) + Gq 2 (s )U 2 (s ) + + Gqj (s )U j (s ) + + Gqp (s )U p (s )
Yi (s ) , i = 1,2, , q; j = 1,2 , ,p Gij (s ) = U j (s )
1 0 1 x1 1 0 u1 x = + x u x − 0 2 0 1 2 2 2 y1 1 0 x1 y = 0 1 x 2 2 1 1 −1
∴ X(s ) = (sI − A ) BU (s )
−1
∴ Y(s ) = C(sI − A ) BU (s ) + DU(s ) = G (s )U(s )
−1
G (s ) = C(sI − A ) B + D
−1
q× p
Y1 (s ) G11 (s ) G12 (s ) G1 p (s ) U1 (s ) Y (s ) G (s ) G (s ) G (s ) U (s ) 22 2p 2 2 = 21 U p (s ) Gq1 (s ) Gq 2 (s ) Gqp (s ) Yq (s )
1 s (s + 2 ) 1 s+2
传递 函数 组成 的矩 阵!
一、定义及表达式
零初始条件下,输出向量的拉氏变换式与输入向量 的拉氏变换式之间的传递关系——传递函数矩阵。
(t ) = Ax(t ) + Bu(t ) ⇒ sX(s ) = AX(s ) + BU(s ) x y (t ) = Cx(t ) + Du(t ) ⇒ Y(s ) = CX(s ) + DU(s )
第 j 个输入与第i 个输出之间的传递函数。
例:已知系统的状态方程,求系统的传递矩阵。
1 0 1 x1 1 0 u1 x = + x u x − 0 2 0 1 2 2 2 y1 1 0 x1 y = 0 1 x 2 2 1 1 s s (s + 2 ) −1 G (s ) = C(sI − A ) B + D = 1 0 s+2 u1 → y1 u2 → y1
Y1 (s ) = G11 (s )U1 (s ) + G12 (s )U 2 (s ) + + G1 j (s )U j (s ) + + G1 p (s )U p (s )
Yi (s ) = Gi1 (s )U1 (s ) + Gi 2 (s )U 2 (s ) + + Gij (s )U j (s ) + + Gip (s )U p (s )
现代控制理论提纲
线性连续系统 线性离散系统
建模 分析
状态空间 表达式
建立 求解 转换
可控性 可观性 稳定性
状态反馈
设计
状态观测器 最优控制
返回
第二章 线性系统的状态空间描述
§1 状态空间表达式及其建立方法 §2 线性连续时不变系统状态方程的解 §3 系统的传递函数矩阵 §4 线性系统状态空间模型的线性变换 §5 线性离散系统的状态空间模型
#2:
前页
∴ X(s ) = (sI − A ) BU (s )
−1
∴ Y(s ) = C(sI − A ) BU (s ) + DU(s ) = G (s )U(s )
−1
G (s ) = C(sI − A )
−1
C(sI − A ) B +D B+D = sI − A
*
例:已知系统的状态方程,求传递函数矩阵。
解:
1 Y1 s Y = 2 0
1 s (s + 2 ) U1 1 U 2 s+2
u1 → y2 u2 → y2
1 1 Y1 = U1 + U2 s s(s + 2 ) 1 Y2 = U2 s+2
MATLAB 相关函数