布朗大学造蝙蝠机器人来研究蝙蝠飞行原理
美国开发机器蝙蝠

美国开发机器蝙蝠作者:来源:《兵器》2017年第04期2017年2月,美国伊利诺伊大学展示了模仿蝙蝠的扑翼无人机。
扑翼飞行具有极高的飞行效率和灵活的操控性,蝙蝠则是飞行机理最复杂的生物,其皮膜翼比羽毛翼更灵活,但构造复杂,具有40个自由度。
该无人机由一块微处理器、一个6自由度惯性测量单元、5个直流电机、碳纤维框架和硅基碳纤维加强薄膜机翼等组成,总重仅92克。
为降低难度,只模仿了蝙蝠翼的5个运动自由度,分别位于肩、肘、腕、腿和尾部,但也获得了蝙蝠57%的飞行动力学性能。
其翼膜厚度仅56微米,翼展47厘米,由一个直流无刷电机通过机械耦合结构驱动两翼同时扑翼,扑翼频率10赫率,还能垂直俯冲。
柔软灵活的扑翼机器人在与人共同行动时更安全,也能在危险地区帮助搜索营救任务。
乌克兰开发新型坦克2017年1月,乌克兰亚雷工程集团披露了开发称为“霸王龙”的新型主战坦克,以便与俄罗斯T-14“阿玛塔”主战坦克竞争的计划。
“霸王龙”将具有许多新特征,包括与T-14“阿玛塔”一样采用无人炮塔,全部三名乘员均位于车体前部,但通过光电系统都具有360°周视能力。
它还将安装带有自动装弹机的125毫米火炮和新一代火控系统,遥控武器站则将安装在炮塔顶部。
在防护方面,该车型将使用最新的装甲解决方案,还将安装主动防护系统,对抗各种制导和非制导的反坦克武器。
据称“霸王龙”的战斗特性将超过乌克兰开发的T-84“堡垒”和T-64BM“布拉特”两型主战坦克。
伊朗推出制导火箭弹在伊朗国防部2017年2月6日推出的5款新式武器中,包括20世纪90年代研制的“黎明”5型300毫米口径多管火箭炮的最新型号,该型号采用了制导火箭弹。
“黎明”5除伊朗外,还装备了叙利亚、利比亚、“真主党”、“哈马斯”和各种伊斯兰圣战者组织,参加了2006年黎巴嫩战争、加沙地带巴以冲突和叙利亚内战。
新型号的外形结构类似SY300,采用进口的6×6军用卡车搭载,车体前部的驾驶室可以乘坐1名司机和两名乘员,其他乘员位于驾驶室后方的封闭车箱内,车体后部的旋转支架上有4发弹,可装备多种战斗部,射程在40?130千米之间,射击精度为250米(惯性制导)和50米(惯性制导+导航卫星制导)。
仿生蝙蝠纸飞机原理

仿生蝙蝠纸飞机原理
仿生蝙蝠纸飞机的原理主要是基于蝙蝠的飞行特点进行设计和模拟。
蝙蝠是一种能够在空中自由飞行的动物,其独特的骨骼结构和翅
膀形状使其具备优秀的飞行能力。
首先,蝙蝠的翅膀具有特殊的结构。
与鸟类的翅膀相比,蝙蝠的
翅膀更加柔软且富有弹性。
这种柔软的翅膀结构能够在飞行时产生较
大的升力和风阻,使蝙蝠能够悬停、转弯和急速飞行。
其次,蝙蝠利用前臂和手指的特殊结构实现了翼的展开和折叠。
蝙蝠的前臂和手指之间存在一种皮膜连接,当它们伸展时,皮膜拉伸
并形成翅膀的表面。
而在折叠时,翼膜缩紧并收起,可以切割空气,
降低阻力。
最后,蝙蝠在飞行过程中能够调节翼膜的形状和角度。
通过控制
手指的运动和张力,蝙蝠可以改变翼膜的曲率,从而调整升力和阻力
的大小。
这种灵活的翼膜调节使蝙蝠能够在不同飞行状态下保持平衡
和稳定。
基于以上原理,仿生蝙蝠纸飞机的设计思路是模仿蝙蝠的翅膀结
构和运动方式。
通过使用柔软的纸张制作翅膀,并采用特殊的折叠方
式使其具备可展开和折叠的特性。
同时,通过调整翅膀的形状和角度,使纸飞机在飞行中能够保持平衡和稳定。
总的来说,仿生蝙蝠纸飞机的原理是通过模仿蝙蝠的翅膀结构和
运动方式,设计一种具备柔软翅膀、可以展开和折叠、能够调节形状
和角度的纸飞机,以实现更好的飞行性能和稳定性。
蝙蝠的什么原理

蝙蝠的什么原理蝙蝠的飞行原理是如何实现的呢?在这篇文章中,我们将详细讨论蝙蝠的飞行原理,探索其独特而精确的方式。
蝙蝠是唯一可以实现主动飞行的哺乳动物。
它们的翼膜由皮肤和骨骼构成,可以在空气中迎风展开并产生升力。
与鸟类的飞行原理相比,蝙蝠的翼膜更为灵活,能够精确地调整翼展和形状,以适应不同的飞行需求。
蝙蝠的翼膜主要由四根骨骼支撑,分别是第二到第五指骨。
这些骨骼与人类的手指类似,但更加延长和细长。
蝙蝠的翼膜通过这些骨骼来保持稳定性,并提供强大的抗风能力。
在飞行时,蝙蝠通过快速摆动翅膀来产生升力和推力。
它们的翅膀骨骼与肌肉密切配合,可以灵活地变形。
在上升阶段,蝙蝠将翅膀向下甩动,产生升力,并通过扇动翅膀快速推进自己。
在下降阶段,蝙蝠将翅膀向上振动,降低阻力,减慢下降速度。
此外,蝙蝠的翅膀表面有一层细小的毛发,能够捕捉空气中的微小涡旋,增加升力。
这些毛发类似于鸟类和昆虫的羽毛,但更加稀疏和细小。
它们能够增加蝙蝠在飞行过程中的机动性和敏捷性。
蝙蝠的翅膀上还有一些独特的结构,如拇指爪和跗骨。
拇指爪位于翅膀的前缘,可以用来攀附和抓取物体。
这使得蝙蝠可以在飞行中捕食昆虫或水果,并在需要时进行临时停留。
蝙蝠的飞行原理还涉及到感知和导航。
它们依赖超声波来感知周围环境和猎物的位置。
蝙蝠的口腔和鼻腔内有一个特殊的器官,称为声纳器官。
当蝙蝠发出声波时,这个器官会接收并解读回声。
通过分析回声的频率、强度和延迟,蝙蝠能够准确地判断目标的位置和形态。
蝙蝠的飞行能力还源于其独特的身体结构。
它们的骨骼相对较轻,胸部肌肉发达,这使得它们具有较高的比强度和耐力。
此外,蝙蝠的代谢率较高,体温较高,这也提供了能量和动力支持。
总结起来,蝙蝠的飞行原理可以归结为以下几个关键因素:柔软而灵活的翼膜、精确而快速的翅膀摆动、细小而敏感的毛发结构、拇指爪和跗骨的使用、超声波感知和导航、轻巧而有力的身体结构和高代谢率。
这些因素共同作用,使蝙蝠成为了天空中的独特飞行者。
美科学家研发模仿蝙蝠的机器人将在没有GPS下飞行

美科学家研发模仿蝙蝠的机器人将在没有GPS下飞行师法自然,是机器人研发重要途径之一。
人类目前已经有模仿夜猴跳跃能力的“跑酷”机器人,有模仿章鱼的软体机器人等等。
现在,这一大家族可以加入一个新成员——蝙蝠机器人。
当地时间2月3日,最新一期《Science Robotics》(《科学·机器人学》)的封面文章介绍了一款模仿蝙蝠飞行的机器人——蝙蝠机器人(Bat Bot B2)。
来自伊利诺伊大学厄巴纳-香槟分校和加州理工学院的研究员Alireza Ramezani、Soon-Jo Chung以及Seth Hutchinson,在过去的几年里,一直在研发这款蝙蝠机器人。
图1:蝙蝠的功能群(functional groups)。
图中列举了蝙蝠的关节角度和功能群组;利用这些功能群可以对蝙蝠飞行时四肢的复杂运动进行分类,以及提取主要的DOF并将它们结合到B2的飞行动力学中。
所选择的DOF通过一系列的机械约束和虚拟约束进行耦合。
以下图片翻译均来自新智元。
“蝙蝠的飞行能力是空中机器人梦寐以求的。
它们能执行复杂的飞行技能,比如颠倒栖息和快速转弯。
蝙蝠还有非常复杂的机翼运动,有超过40个关节和非常薄的膜翅膀。
”加州理工学院教授Soon-Jo Chung说。
蝙蝠是哺乳动物中唯一能用翅膀自主飞行的动物,飞行动作优雅且高效,还能做到中途悬停。
相比鸟类,蝙蝠可以说是自然界进化的奇迹。
每个支撑翅膀的骨头实际上都是超长的足趾,并由一层薄膜覆盖。
这样的特征给了蝙蝠一些鸟类不具有的天赋,让它在飞行中,具有难以置信的机动性,可用翅膀拦截昆虫。
蝙蝠另外一个令人羡慕的能力是夜视能力。
在黑夜里,无论怎么飞,从来没见过它跟什么东西相撞,即使一根极细的电线,它也能灵巧地避开,还能捕捉飞蛾和蚊子。
原因是它的飞行不靠眼睛,而是耳朵。
蝙蝠在飞行中可以一边飞,一边从嘴里发出一种声音。
这种声音叫做超声波,人的耳朵是听不见的,蝙蝠的耳朵却能听见。
超声波像波浪一样向前推进,遇到障碍物就反射回来,传到蝙蝠的耳朵里,蝙蝠就立刻改变飞行的方向。
蝙蝠飞行原理生活中的应用
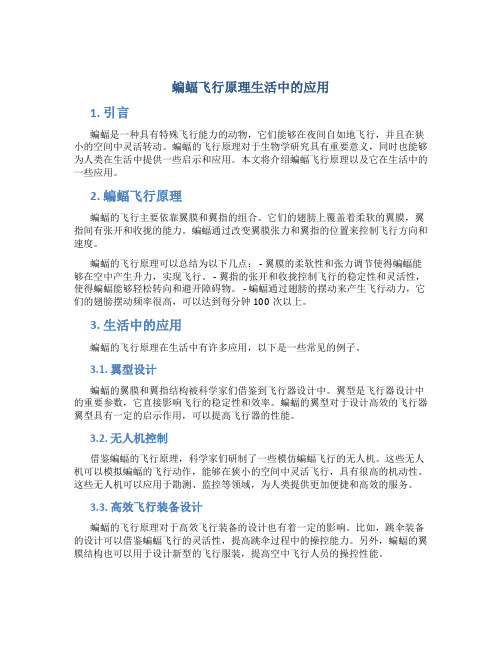
蝙蝠飞行原理生活中的应用1. 引言蝙蝠是一种具有特殊飞行能力的动物,它们能够在夜间自如地飞行,并且在狭小的空间中灵活转动。
蝙蝠的飞行原理对于生物学研究具有重要意义,同时也能够为人类在生活中提供一些启示和应用。
本文将介绍蝙蝠飞行原理以及它在生活中的一些应用。
2. 蝙蝠飞行原理蝙蝠的飞行主要依靠翼膜和翼指的组合。
它们的翅膀上覆盖着柔软的翼膜,翼指间有张开和收拢的能力。
蝙蝠通过改变翼膜张力和翼指的位置来控制飞行方向和速度。
蝙蝠的飞行原理可以总结为以下几点: - 翼膜的柔软性和张力调节使得蝙蝠能够在空中产生升力,实现飞行。
- 翼指的张开和收拢控制飞行的稳定性和灵活性,使得蝙蝠能够轻松转向和避开障碍物。
- 蝙蝠通过翅膀的摆动来产生飞行动力,它们的翅膀摆动频率很高,可以达到每分钟100次以上。
3. 生活中的应用蝙蝠的飞行原理在生活中有许多应用,以下是一些常见的例子。
3.1. 翼型设计蝙蝠的翼膜和翼指结构被科学家们借鉴到飞行器设计中。
翼型是飞行器设计中的重要参数,它直接影响飞行的稳定性和效率。
蝙蝠的翼型对于设计高效的飞行器翼型具有一定的启示作用,可以提高飞行器的性能。
3.2. 无人机控制借鉴蝙蝠的飞行原理,科学家们研制了一些模仿蝙蝠飞行的无人机。
这些无人机可以模拟蝙蝠的飞行动作,能够在狭小的空间中灵活飞行,具有很高的机动性。
这些无人机可以应用于勘测、监控等领域,为人类提供更加便捷和高效的服务。
3.3. 高效飞行装备设计蝙蝠的飞行原理对于高效飞行装备的设计也有着一定的影响。
比如,跳伞装备的设计可以借鉴蝙蝠飞行的灵活性,提高跳伞过程中的操控能力。
另外,蝙蝠的翼膜结构也可以用于设计新型的飞行服装,提高空中飞行人员的操控性能。
3.4. 城市规划和建筑设计借鉴蝙蝠的飞行原理,可以在城市规划和建筑设计中应用。
蝙蝠能够在狭小的空间中灵活转动,可以为城市的规划提供一些建议。
另外,一些建筑设计中也可以借鉴蝙蝠翼膜的结构,提高建筑的空气动力学性能。
蝙蝠机器人原理

蝙蝠机器人原理一、引言随着科技的飞速发展,仿生学在机器人领域的应用日益广泛。
其中,蝙蝠机器人作为一种模仿蝙蝠飞行特性的机器人,受到了研究者的广泛关注。
蝙蝠机器人不仅能够模拟蝙蝠的飞行动作,而且在某些性能上甚至超越了真实的蝙蝠。
本文将详细阐述蝙蝠机器人的工作原理,包括其设计灵感、机械结构、飞行控制以及潜在应用等方面。
二、蝙蝠的飞行特性与仿生学启示蝙蝠是哺乳动物中唯一能够真正飞行的类群,它们的飞行能力得益于独特的生理结构和飞行机制。
蝙蝠的翅膀既灵活又坚固,能够产生复杂的空气动力学效应,使它们能够在空中进行敏捷的飞行和捕食。
此外,蝙蝠还拥有一套先进的回声定位系统,能够在黑暗中准确地探测到障碍物的位置和形状。
蝙蝠的这些特性为蝙蝠机器人的设计提供了宝贵的启示。
研究者们通过模仿蝙蝠的翅膀结构和飞行机制,试图在机器人上复现这种高效的飞行能力。
同时,蝙蝠的回声定位系统也为蝙蝠机器人的环境感知和导航提供了灵感。
三、蝙蝠机器人的机械结构蝙蝠机器人的机械结构主要包括机身、翅膀和驱动系统三部分。
机身是蝙蝠机器人的主体部分,负责承载各种电子设备和机械结构。
为了减轻重量和提高飞行效率,机身通常采用轻质材料制成,如碳纤维和铝合金等。
翅膀是蝙蝠机器人的关键部分,负责产生升力和控制飞行方向。
翅膀的设计灵感来源于蝙蝠的翅膀结构,通常采用柔性材料制成,如薄膜和纤维等。
翅膀的形状和面积可以根据需要进行调整,以产生不同的飞行效果。
驱动系统是蝙蝠机器人的动力来源,负责驱动翅膀的扇动和机身的运动。
驱动系统通常采用电机和传动机构组成,通过控制电机的转速和转向来实现对翅膀和机身的精确控制。
四、蝙蝠机器人的飞行控制蝙蝠机器人的飞行控制是实现其飞行能力的关键环节。
飞行控制主要包括姿态控制、导航控制和环境感知三部分。
姿态控制是蝙蝠机器人飞行控制的基础,负责保持机器人的稳定飞行姿态。
姿态控制通常采用陀螺仪和加速度计等传感器来感知机器人的姿态变化,并通过控制算法对姿态进行调整,以保持机器人的稳定飞行。
蝙蝠飞行的原理

蝙蝠飞行的原理蝙蝠是一种独特的哺乳动物,它们以其独特的飞行方式而闻名于世。
蝙蝠的飞行原理一直以来都备受人们的好奇和研究。
蝙蝠的飞行方式与鸟类和昆虫有很大的不同,它们利用翅膀的柔软性和膜翼的特殊结构,以及独特的飞行姿势,实现了高效的飞行能力。
本文将从蝙蝠的生理结构、飞行姿势和飞行动力等方面,深入探讨蝙蝠飞行的原理。
首先,蝙蝠的翅膀是其飞行的关键。
蝙蝠的翅膀与鸟类的翅膀有着明显的区别,它们的翅膀由一层薄膜连接在躯干和四肢之间,形成了一个独特的膜翼结构。
这种膜翼结构使得蝙蝠的翅膀更加柔软和灵活,可以实现更大范围的摆动和变形,从而有效地利用空气动力学原理,实现飞行。
蝙蝠在飞行时,可以通过主动调整翅膀的形状和角度,灵活地控制飞行的方向和速度,使得其具有非常高的飞行机动性。
其次,蝙蝠的飞行姿势也对其飞行能力起到了至关重要的作用。
蝙蝠在飞行时通常采用俯冲、滑翔和盘旋等飞行姿势,这些姿势可以帮助蝙蝠更好地利用空气动力学原理,减少飞行阻力,提高飞行效率。
特别是在捕食时,蝙蝠可以通过快速的俯冲和灵活的滑翔,迅速捕捉到猎物,实现高效的捕食行为。
这种独特的飞行姿势使得蝙蝠成为了一种高效的捕食者,具有很强的生存竞争力。
最后,蝙蝠的飞行动力也是其飞行原理的重要组成部分。
蝙蝠在飞行时主要依靠翅膀的摆动和膜翼的变形,产生空气动力学推力,推动自身飞行。
此外,蝙蝠的飞行还受到身体肌肉和骨骼结构的支撑和调节,这些生理结构可以帮助蝙蝠更好地适应飞行状态,减少飞行疲劳,提高飞行效率。
总的来说,蝙蝠的飞行动力是由其独特的生理结构和飞行姿势相互配合,共同实现的。
总的来说,蝙蝠的飞行原理是一个复杂而精妙的系统工程,它涉及生物学、物理学和空气动力学等多个学科领域。
蝙蝠以其独特的飞行方式,展现了大自然的神奇和奥妙,对人类的飞行技术和生物学研究都具有重要的启示意义。
希望通过对蝙蝠飞行原理的深入研究,可以更好地理解和借鉴自然界的智慧,推动人类科技的发展和进步。
美国无人机蝙蝠实验报告
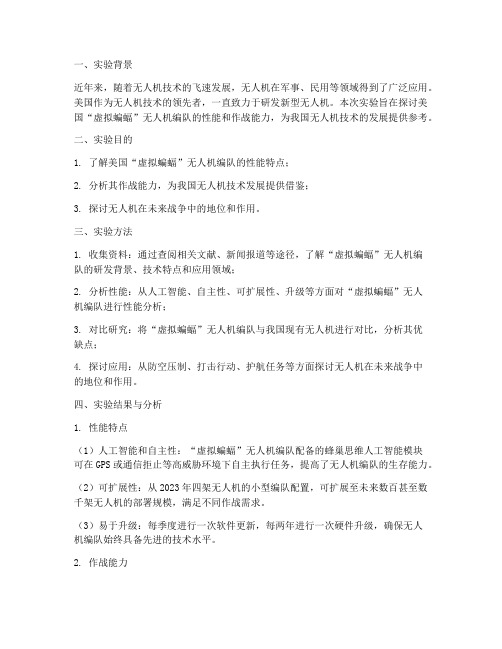
一、实验背景近年来,随着无人机技术的飞速发展,无人机在军事、民用等领域得到了广泛应用。
美国作为无人机技术的领先者,一直致力于研发新型无人机。
本次实验旨在探讨美国“虚拟蝙蝠”无人机编队的性能和作战能力,为我国无人机技术的发展提供参考。
二、实验目的1. 了解美国“虚拟蝙蝠”无人机编队的性能特点;2. 分析其作战能力,为我国无人机技术发展提供借鉴;3. 探讨无人机在未来战争中的地位和作用。
三、实验方法1. 收集资料:通过查阅相关文献、新闻报道等途径,了解“虚拟蝙蝠”无人机编队的研发背景、技术特点和应用领域;2. 分析性能:从人工智能、自主性、可扩展性、升级等方面对“虚拟蝙蝠”无人机编队进行性能分析;3. 对比研究:将“虚拟蝙蝠”无人机编队与我国现有无人机进行对比,分析其优缺点;4. 探讨应用:从防空压制、打击行动、护航任务等方面探讨无人机在未来战争中的地位和作用。
四、实验结果与分析1. 性能特点(1)人工智能和自主性:“虚拟蝙蝠”无人机编队配备的蜂巢思维人工智能模块可在GPS或通信拒止等高威胁环境下自主执行任务,提高了无人机编队的生存能力。
(2)可扩展性:从2023年四架无人机的小型编队配置,可扩展至未来数百甚至数千架无人机的部署规模,满足不同作战需求。
(3)易于升级:每季度进行一次软件更新,每两年进行一次硬件升级,确保无人机编队始终具备先进的技术水平。
2. 作战能力(1)侦察与感知:覆盖范围大,具备全天候发现、定位和瞄准数千处敌方资产的能力,为指挥官提供准确情报。
(2)防空压制:无人机编队可执行防空压制任务,干扰敌方防空系统,降低敌方防空能力。
(3)打击行动:无人机编队可执行打击任务,对敌方重要目标进行精确打击。
(4)护航任务:无人机编队可执行护航任务,为其他飞行器提供安全保障。
3. 对比研究与美国“虚拟蝙蝠”无人机编队相比,我国现有无人机在人工智能、自主性、可扩展性等方面仍有一定差距。
但我国无人机技术发展迅速,有望在未来实现超越。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
布朗大学造蝙蝠机器人来研究蝙蝠飞行原理
最近,我们看到一个机器人鸵鸟。
现在,有一个机器人蝙蝠或者至少其
中的一部分。
约瑟夫Bahlman,布朗大学的一名研究生,在教授肯尼斯-布鲁尔和莎朗斯沃茨的帮助下,已经开发了一个仿生的机器人蝙蝠翼韧带,皮肤和结构都模仿真的蝙蝠。
这个项目的目的是为了更进一步的了解蝙蝠的飞行结构。
对于我们来说,蝙蝠比鸟更密切相关,但他们比鸟类往往更有点神秘。
它不是简单地在晚上飞来飞去,并且关联到过分打扮的特兰西瓦尼亚人(似乎好像
是吸血鬼的意思)的奇怪的饮食。
他们也是唯一会飞的哺乳动物,以及它们究竟
怎样保持机载这些都有点难以理解。
蝙蝠不像飞机。
你不能在风洞中捅到一只,而且如果你尝试了,他们就再也不会停在这里了。
我们不能要求一个蝙蝠翅膀的频率从8 赫兹增长到9 赫兹去让我们看到其中出现的差别,Bahlman 说。
他们真的非常不配合。
他们也非常复杂。
翅膀可以伸长,以及蝙蝠的身体,都是靠手臂和手支撑的事实上,它的翅膀是几乎就是它的手。
在这个框架上是一个非常有弹性的皮肤,可以延伸至400%而没有一丝撕裂。
这些观点使机器人具有吸引力的,因为它不仅是合作,而且可以简化。
或者说,它简化了,因为这项技术完全复制一个并不存在的蝙蝠翼。
在Bahlman 布鲁尔, 一名工程师和生物学家Swartz 的帮助下,布朗大学的蝙机器人得到设计并开始建造。
它有3 d 印刷塑料骨头和一个硅酮弹性体的皮肤。
七个关节驱动三个伺服电机牵引电缆像肌腱。
机器人不适合飞行,但对风洞测试。
有一个传感器的测量在翅膀上假如它正在通过一个风洞。
通过测量这些,研究人员可以学到很多关于蝙蝠的翅膀飞行。