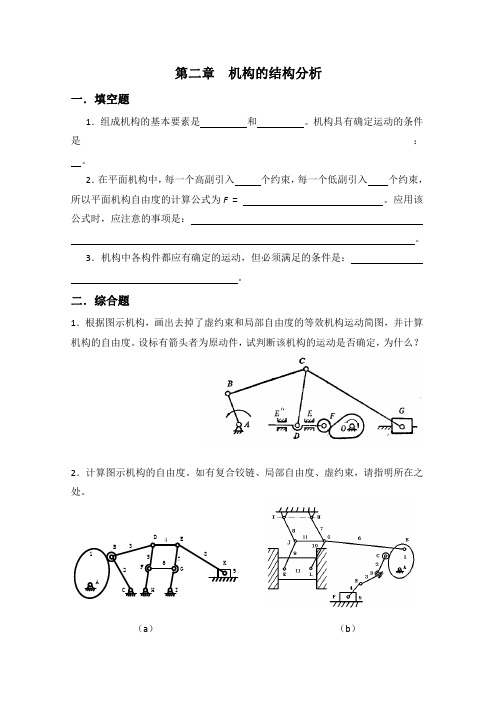
2016河南科技大学机械原理复习题及答案(9-12章)
机械原理试题和答案解析

机械原理试题和答案解析一、试题1. 选择题(1)以下哪个部件是机械系统中的基本组成单元?A. 齿轮B. 轴承C. 零件D. 螺纹(2)以下哪个原理是机械设计中的基本原理?A. 动力原理B. 能量原理C. 力学原理D. 功能原理(3)以下哪种运动是机械系统中常见的运动形式?A. 线性运动B. 圆周运动C. 往复运动D. 振动2. 填空题(1)机械原理研究的三大基本问题是:______、______、______。
(2)机械系统中,作用力和反作用力的关系遵循______定律。
(3)机械效率是指______与______的比值。
3. 判断题(1)机械原理研究的对象包括静止和运动的物体。
()(2)机械系统中的零件必须具有足够的强度、刚度和稳定性。
()(3)机械效率越高,机械性能越好。
()4. 应用题(1)已知一斜面,倾角为30°,物体质量为10kg,摩擦系数为0.2。
求物体沿斜面下滑时的加速度。
(2)某机械系统中有两个齿轮,齿轮1的齿数为20,齿轮2的齿数为40。
求齿轮1和齿轮2的转速比。
二、答案解析1. 选择题(1)答案:C。
解析:机械系统中的基本组成单元是零件,零件通过一定的连接方式组成机械系统。
(2)答案:C。
解析:机械设计中的基本原理是力学原理,包括牛顿运动定律、动量守恒定律、能量守恒定律等。
(3)答案:C。
解析:机械系统中常见的运动形式有线性运动、圆周运动、往复运动和振动等,其中往复运动在机械系统中应用较为广泛。
2. 填空题(1)答案:力与运动、力与平衡、运动与平衡。
解析:机械原理研究的三大基本问题是力与运动、力与平衡、运动与平衡。
(2)答案:牛顿第三定律。
解析:作用力和反作用力的关系遵循牛顿第三定律,即作用力和反作用力大小相等、方向相反。
(3)答案:输出功、输入功。
解析:机械效率是指输出功与输入功的比值,反映了机械系统的工作性能。
3. 判断题(1)答案:正确。
解析:机械原理研究的对象包括静止和运动的物体,研究它们的运动规律和受力情况。
机械原理复习试题(附答案)

用心整理的精品 word 文档,下载即可编辑!!
5、等加速等减速运动规律的凸轮机构将引起_____冲击。 刚性 柔性 无
6、简谐运动规律的凸轮机构将引起_____冲击。 刚性 柔性 无
7、根据工作经验,建议直动从动件凸轮机构推程许用压力角等于_____。 30° 0° 90°
5 精心整理,用心做精品
用心整理的精品 word 文档,下载即可编辑!!
传动
13、若以_____为目的,则机构的死点位置可以加以利用。 夹紧和增力 传动
14、判断一个平面连杆机构是否具有良好的传力性能,可以_____的大小为依据。 传动角 摆角 极位夹角
15、压力角与传动角的关系是α+γ=_____。 180o 45o 90o
3、在机构中原动件数目_____机构的自由度时,该机构具有确定的运动。 大于 等于 小于
4、机构具有确定运动的条件是_____。 自由度大于零 自由度等于原动件数 自由度大于 1
5、由 K 个构件汇交而成的复合铰链应具有_____个转动副。 K-1 K K+1
6、一个作平面运动的自由构件有_____个自由度。 1 3 6
16、平面连杆机构中,至少有一个连杆。 是 否
17、平面连杆机构中,最少需要四个构件。 是 否
18、有死点的机构不能产生运动。 是 否
19、平面连杆机构可利用急回特性,缩短非生产时间,提高生产率。 是 否
20、平面连杆机构中,极位夹角θ越大,K 值越大,急回运动的性质也越显著。 是 否
21、机构的压力角越大,传力越费劲,传动效率越低。 是 否
4、铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以_____为机架 时,有两个曲柄。
机械原理复习习题(含答案)及答案
8、机器运转过程中产生周期性速度波动的主要原因是
。
二、简答题
1、何谓机器的周期性速度波动?波动幅度大小应如何调节?能否完全消除周期性速度波动,为什么?
2、等效质量的等效条件是什么?如果不知道机构的真实运动,能否求得等效质量,为什么?
3、通常,机器的运转分为几个阶段以及各阶段的功能特征是什么?何谓等速稳定运转和周期性变速稳定运转?
。
2、在图示(a)、(b)、(c)三根轴中,已知 ,并作轴向等间隔布置,且都在曲轴的同一含轴平面内,则其中轴已达到静平衡,轴已达到动平衡。
(a)
(b)
(c)
3、刚性转子静平衡的条件是;而动平衡的条件是。
4、设计形体不对称的回转零件时,要进行平衡计算,但在制造过程中还要安排一道工序,这是因为。
5、只使刚性转子的得到平衡称为静平衡,此时只需要在个平面中增减质量;使和同时得到平衡称为动平衡,此时至少要在个选定的平衡面中增减质量。
7、已知图示机构中各构件的尺寸,原动件1以匀速V1移动,求出图示位置时构件3的角速度ω3和角加速度3。要求列出矢量方程式、分析各矢量的大小和方向、作出速度与加速度多边形(可不按比例)、并列出ω3和3表达式。
8、回转导杆机构的速度多边形如图2)所示,试判断其哥氏加速度aKC2C3的方向并标画在图上,并写明判断的方法。
2、图示为由几种机构组成的机器传动简图。已知:η1=η2=0.98,η3=η4=0.96,η5=η6=0.94,η7=0.42,Pr’=5KW,Pr’’=0.2KW。求机器的总效率η。
3、图示铰链四杆机构中,AB杆为主动件,CD杆为从动件,虚线小圆为各铰链处之摩擦圆。已知构件CD上作用有生产阻力R,若不计构件的自重和惯性力,试确定:1)图示位置时,主动构件AB的转向;2)图示位置时,连杆BC所受的作用力R12和R32的作用线。(3)作用在主动件1上的驱动力矩M1的方向以及约束反力R21与R41的方位。
机械原理习题(附参考答案)

机械原理习题(附参考答案)一、单选题(共40题,每题1分,共40分)1.一个做空间运动的自由构件具有()个自由度。
:A、5B、4C、3D、6正确答案:D2.代表渐开线圆柱齿轮的压力角位于()。
:A、基圆B、齿根圆C、分度圆D、齿顶圆正确答案:C3.当压力角等于()时,出现死点位置,可以通过直接加外力、靠惯性、采用多组相同机构错位排列的方法使机构顺利通过死点位置。
:A、360°B、180°C、90°D、0°正确答案:C4.从动件空回行程平均速度与工作行程平均速度的比值称为行程速比系数,通常用行程速比系数K衡量急回程度,K值越大,急回程度越大,当K()时,机构无急回。
:A、大于1B、等于1C、小于1D、等于0正确答案:B5.平面机构自由度的计算公式为F=3n-2PL-PH,其中n为活动构件个数,PL为()个数,PH为高副个数。
:A、机架B、活动构件C、低副D、高副正确答案:C6.()齿廓上各点的压力角都相同,其大小等于齿形角。
:A、斜齿轮B、锥齿轮C、齿条D、直齿轮正确答案:C7.机架是用来支撑活动构件的构件,()是运动规律已知的活动构件,随原动件运动而运动的其余活动构件称为从动件,其中输出预期运动的构件称为输出件。
:A、原动件B、机架C、从动件D、输出件正确答案:A8.两构件只能沿某一直线相对移动的运动副叫做()。
:A、球面副B、转动副C、空间副D、移动副正确答案:D9.齿轮轮廓是()齿廓,此齿廓的提出已有近两百多年的历史,目前还没有其它曲线可以替代。
主要在于它具有很好的传动性能,而且便于制造、安装、测量和互换使用等优点。
:A、渐开线B、直线C、五次曲线D、抛物线正确答案:A10.周转轮系传动比的计算通常采用()。
:A、正转法B、阻抗力法C、摩擦力法D、反转法正确答案:D11.铰链四杆机构的自由度为()。
:A、3B、1C、4D、2正确答案:B12.()的自由度等于2,两个中心轮都运动,给定2个原动件机构的运动才是确定的。
机械原理复习题带答案docx
机械原理复习题带答案docx一、选择题(每题2分,共10分)1. 机械运动的基本形式包括哪些?A. 平移和旋转B. 平移和摆动C. 旋转和摆动D. 平移、旋转和摆动答案:A2. 四杆机构中,哪个杆件的长度决定了机构的运动特性?A. 连杆B. 摇杆C. 曲柄D. 滑块答案:C3. 齿轮传动中,齿数比与传动比之间的关系是什么?A. 齿数比等于传动比B. 齿数比与传动比成反比C. 齿数比与传动比成正比D. 齿数比与传动比无关答案:C4. 凸轮机构中,凸轮的形状如何影响从动件的运动?A. 凸轮形状不影响从动件运动B. 凸轮形状决定了从动件的加速度C. 凸轮形状决定了从动件的位移D. 凸轮形状决定了从动件的速度答案:C5. 机械系统中,哪种类型的轴承允许轴向移动?A. 深沟球轴承B. 圆锥滚子轴承C. 推力球轴承D. 角接触球轴承答案:C二、填空题(每题2分,共10分)1. 机械效率是输出功率与输入功率之比,用符号____表示。
答案:η2. 机械系统中,____是将旋转运动转换为直线运动的机构。
答案:螺旋机构3. 在齿轮传动中,____是两个齿轮啮合时,齿数最少的齿轮。
答案:小齿轮4. 机械振动中,____是指系统在没有外力作用下,由于自身能量损失而逐渐减弱的振动。
答案:阻尼振动5. 机械设计中,____是指零件在工作过程中,由于材料内部缺陷或外部载荷作用而发生断裂的现象。
答案:疲劳破坏三、简答题(每题10分,共20分)1. 简述机械系统中的自由度和约束的概念,并举例说明。
答案:机械系统中的自由度是指系统在空间中可以独立运动的方向数。
约束是指限制系统自由度的条件。
例如,一个铰链连接的平面四杆机构,其自由度为3,因为可以在三个相互垂直的方向上移动。
而铰链本身则提供了两个约束,限制了机构在这两个方向上的平移自由度。
2. 描述齿轮传动的优缺点。
答案:齿轮传动的优点包括高效率、结构紧凑、传动比准确、可实现远距离传动等。
机械原理_河南科技大学中国大学mooc课后章节答案期末考试题库2023年
机械原理_河南科技大学中国大学mooc课后章节答案期末考试题库2023年1.带动其它构件的构件,称为原动件。
答案:运动2.具有确定运动的行星轮系,其原动件数目。
答案:只有1个3.两构件组成平面转动副时,则运动副使构件间丧失了的独立运动。
答案:两个移动4.曲柄滑块机构是由曲柄摇杆机构的长度趋向无穷大而演变来的。
答案:摇杆5.当曲柄摇杆机构的曲柄原动件位于时,机构的压力角最大。
答案:曲柄与机架共线的两位置之一6.平面四杆机构中是否存在死点,取决于是否与连杆共线。
答案:从动件7.若发现移动滚子从动件盘形凸轮机构的压力角超过了许用值时,且凸轮的实际廓线又出现变尖,此时应采取的措施是。
答案:增大基圆半径8.滚子从动件盘形凸轮的基圆半径是从凸轮转动中心到的最短距离。
答案:凸轮理论廓线9.为了使凸轮机构正常工作和具有较高的效率,要求凸轮机构的最小压力角的值不得超过某一许用值。
此句中错误的是。
答案:最小10.两齿轮的实际中心距与设计中心距略有偏差,则两轮传动比。
答案:不变11.一对直齿圆柱变位齿轮传动(无侧隙啮合),若变位系数x1=0.05,x2=-0.2,实际中心距标准中心距。
答案:小于12.若忽略摩擦,一对渐开线齿轮啮合时,齿廓间作用力沿着方向。
答案:基圆内公切线13.渐开线齿轮传动的重合度随着齿轮增大而增大,而与齿轮的无关。
答案:齿数、模数14.一对直齿圆柱齿轮的中心距等于两分度圆半径之和,但等于两节圆半径之和。
答案:不一定、一定15.用范成法切制渐开线齿轮时,齿轮根切的现象可能发生在的场合。
答案:齿数较少16.一对渐开线齿轮啮合传动时,两齿廓间。
答案:除节点外各处均有相对滑动17.渐开线直齿圆柱齿轮中,齿距,法向齿距,基圆齿距为。
答案:pb=pn<p18.渐开线直齿条与正变位直齿圆柱齿轮传动时,齿轮的节圆半径分度圆半径。
答案:等于19.齿轮传动时,若发现重合度小于1的情况,则修改设计的措施应是。
答案:重选变位系数20.有一对渐开线直齿圆柱齿轮传动,其变位系数分别为x1,x2。
机械原理复习题及答案

机械原理复习题及答案机械原理复习题及答案机械原理是工程学中的重要基础课程,它涉及到力学、材料学、动力学等多个学科的知识。
掌握机械原理的基本概念和原理,对于理解和应用工程学的其他领域都具有重要意义。
下面,我们将给大家提供一些机械原理的复习题及答案,希望能够帮助大家更好地巩固和理解这门课程的知识。
一、选择题1. 下列哪个是机械原理的基本定律?A. 质点运动定律B. 牛顿第一定律C. 原子力定律D. 热力学第一定律答案:B2. 在力的作用下,物体的加速度与作用力成正比,与物体质量成反比。
这是由下列哪个定律推导出来的?A. 牛顿第一定律B. 牛顿第二定律C. 牛顿第三定律D. 牛顿万有引力定律答案:B3. 在平衡条件下,物体所受合力的合力矩为零。
这是由下列哪个定律推导出来的?A. 牛顿第一定律B. 牛顿第二定律C. 牛顿第三定律D. 力矩定律答案:D4. 下列哪个是机械原理中的基本力学量?A. 力B. 能量C. 功D. 热量答案:A5. 下列哪个是机械原理中的基本力学定律?A. 质点运动定律B. 能量守恒定律C. 动量守恒定律D. 热力学第一定律答案:A二、填空题1. 牛顿第二定律的数学表达式是__________。
答案:F = ma2. 力矩的数学表达式是__________。
答案:M = Fd3. 力的单位是__________。
答案:牛顿(N)4. 功的单位是__________。
答案:焦耳(J)5. 动量的单位是__________。
答案:千克·米/秒(kg·m/s)三、简答题1. 什么是机械原理中的平衡条件?请举例说明。
答:在机械原理中,平衡条件是指物体所受合力的合力矩为零的状态。
例如,当一个物体在水平面上静止时,它所受的重力和支持力的合力矩为零,这就是平衡条件。
2. 什么是机械原理中的力矩?它有什么作用?答:力矩是指力对物体产生的转动效应。
它的大小等于力与力臂的乘积。
力矩的作用是使物体发生转动或保持平衡。
机械原理复习题及答案(doc 14页)
机械原理复习题及答案(doc 14页)《机械原理》复习题一.填空题:1设螺纹的升角为λ,接触面的当量摩擦系数为,则螺旋副自锁的条件为3 对心曲柄滑块机构以曲柄为原动件时,其最大传动角γ为4为了减小飞轮的质量和尺寸,最好将飞轮安装在机械的高速轴上。
5、机器中安装飞轮的目的,一般是为了调节周期性速度波动而同时还可达到减少投资,降低能耗的目的;6、内啮合斜齿圆柱齿轮传动的正确啮合条件是7、一对斜齿圆柱齿轮传动的重合度由端面重合度和轴向重合度两部分组成,斜齿轮的当量齿轮是指_与斜齿轮法面齿形相当的直齿轮;8、3个彼此作平面平行运动的构件间共有 3 个速度瞬心,这几个瞬心必定位于同一直线上;9、含有6个构件的平面机构,其速度瞬心共有15 个,其中有 5 个是绝对瞬心,有10 个是相对瞬心;10、周期性速度波动和非周期性速度波动的调节方法分别为安装飞轮和安装调速器;11、在凸轮机构推杆的四种常用运动规律中一次多时速度相同的点,不同点相对瞬心的绝对速度大小不为0,绝对瞬心的绝对速度大小为0 ,在有六个构件组成的机构中,有15 个瞬心。
22刚性回转构件的不平衡可以分为两种类型,一种是静不平衡,其质量分布特点是质量分布在垂直于回转轴线的同一平面内;另一种是动不平衡,其质量分布特点是质量分布在若干个不同的回转平面内。
23在曲柄摇杆机构中,当曲柄与机架两次共线位置时出现最小传动角。
24移动副的自锁条件是外力作用在摩擦锥内,转动副的自锁条件是外力作用在摩擦圆内,从效率的观点来看,机构的自锁条件是。
25根据机构的组成原理,任何机构都可以看作是由机架、原动件和从动件组成的。
26刚性转子的静平衡就是要使惯性力之和为零。
而刚性转子的动平衡则要使惯性力之和为零以及惯性力偶矩之和为零。
27渐开线齿轮的齿廓形状取决于基圆半径的大小,其值越大齿廓形状越平缓(基圆半径越大齿廓的曲率半斤越大)。
28采用范成法切制渐开线齿廓时发生根切的原因是啮合极限点落在刀具齿顶线之下。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
9-10 一对心滚子移动从动件盘形凸轮机构,已知凸轮的基圆半径r 0=50mm ,滚子半径r r =15mm ,凸轮以等角速度顺时针转动,当凸轮转过δ0=180o 时,从动件以等加速等减速运动规律上升h =40mm ;凸轮再转δ0' =150o 时,从动件以余弦加速度运动规律返回原处;其余δ02=30o 时,从动件静止不动,试用解析法计算δ=60o 、240o 时凸轮实际轮廓曲线上点的坐标。
解:理论廓线方程 实际廓线方程∵ ∵ ∵, ,,推程等加速度段方程: 当δ0=180︒=π,h =40mm , 因为凸轮顺时针转动,以δ=-60︒=-π/3代入时:(θ角在第二象限)时,回程余弦加速度段方程: 当 时:8254.22)72sin(24)6/560sin(6/5240)sin(20=︒--=︒⋅-⋅⋅-=''-=ππππδπδδπδh d ds求x 、y 值时以δ= —240°代入得:(θ角在第四象限)δ+=δ+=cos )(sin )(00s s y s s x θ-='θ-='sin cos r r r y y r x x 22)/()/(/sin δ+δδ=θd dy d dx d dx 22)/()/(/cos δ+δδ-=θd dy d dx d dy 5000==r s ︒︒=δ90~09/80)3/(402222202=-⨯⨯==ππδδh s 4444.29)60cos(9/8050cos )(9993.50)60sin(9/8050sin )(00=︒-⋅+=+=-=︒-⋅+=+=)()(δδs s y s s x 1465.44)60cos()9/8050()60sin()3/(404cos )(sin 42020=︒-++︒--⨯⨯=++=ππδδδδδs s h d dx 5110.42)60sin()9/8050()60cos()3/(404sin )(cos 42020=︒-+-︒--⨯⨯=+-=ππδδδδδs s h d dy 6936.0cos ,7203.0sin -==θθ6395.187203.0154444.29sin 5947.40)6936.0(15999.50cos =⨯-=-='-=-⨯--=-='θθr r r y y r x x ︒︒=δ150~0︒-=︒-︒-===︒='60)180240(,40,6/51500δπδmm h 1803.26)6/560cos(1240)cos(120=⎥⎦⎤⎢⎣⎡︒⋅-+=⎥⎦⎤⎢⎣⎡'+=ππδπδh s 0902.38)240cos(1803.2650cos )(9741.65)240sin(1803.2650sin )(00-=︒-⋅+=+==︒-⋅+=+=)()(δδs s y s s x 3228.18)0902.38(7674.19)240cos()1803.2650()240sin(8254.22cos )(sin 0-=-+=︒-++︒-⋅=++⋅=δδδδs s d ds d dx 3868.77)9741.65(4127.11)240sin()1803.2650()240cos(8254.22sin )(cos 0-=--=︒-+-︒-⋅=+-⋅=δδδδs s d dsd dy 9731.0cos ,2304.0sin =-=θθ6332.34)2304.0(150902.38sin 3776.519731.0159741.65cos -=-⨯--=-='=⨯-=-='θθr r r y y r x x 2022δδ=h s第十章 齿轮机构及其设计10—1已知一条渐开线,其基圆半径为r b =50mm ,试求:(1) 渐开线在向径r K =65mm 的点K 处的曲率半径ρK 、压力角αK 及展角θK ; (2) 渐开线在展角θK =10°时的压力角αK 及向径r K 。
解:(1)(2)10—2 当α=20°的正常齿渐开线标准齿轮的齿根圆和基圆相重合时,其齿数为多少?又若 齿数大于求出的数值,则基圆和根圆哪一个大? 解:当基圆与根圆重合时:当 时:当z ≥42 时,由式 (*) 可知,等号左边不变右边增大,说明根圆大于基圆。
mmr inv r r K b K K K K K K K b K 5331.413439tan 50tan 542578793.713752.0180/34393439tan tan 3439715137.3976923.06550cos ='⨯=α=ρ'''===π⨯'-'=α-α=α=θ'==α===α mm r r K b K K K 8171.670342cos 50cos 0342174533.010='=α='=α==θ)2(cos 2**c h z m r mz r a f b --=α=f b r r =α-+=*+-=α--=αcos 1)(2)()(21cos )2(cos 2******c h z zc h c h z m mz a a a 25.01**==c h a ,45.419396.0125.12cos 1)(2**=-⨯=α-+=c h z a10—5已知一正常齿渐开线标准齿轮z =18,m =10mm ,α=20°,求齿顶圆齿厚和基圆齿厚。
当齿顶变尖时,齿顶圆半径又应为多少? 解:齿顶厚基圆齿厚齿顶变尖,s a =0,则:mminv r s s b b 2816.17014904.057.84220cos 708.152cos =⨯⨯+⨯=α+α= mmm h r r mmr r mmmz r mm m s a a b 100109057.8420cos 90cos 90218102708.152102*=+=+==⨯=α==⨯===π=π= mm inv inv r r rs s a a a a 8173.6)014904.0068084.0(100290100708.15)(2=-⨯-⨯=α-α-=)(2α-α=inv inv r r rs a a a mm r r inv r s inv a b a a a 0923.1055236cos 57.84cos 523610217.0)014904.0290708.15(21)2(21='=α='=α=⨯+=α+=α 115132253.32)10057.84(cos )(cos 11'''====α-- a b a r r10—8 若将上题的中心距加大,直至刚好连续传动,试求: (1) 啮合角α'和中心距a ′; (2) 节圆半径r 1'和r 2' ;(3) 在节点啮合时两轮齿廓的曲率半径ρ1'和ρ2'; (4) 顶隙c '和节圆上的齿侧间隙j t '。
解:刚好连续传动,则:[])tan (tan )tan (tan 212211α'-α+α'-απ=εαa a z z 1=εα412323.234293.04219224.26tan 4277.31tan 192tan tan tan 212211'==α'=+π-+=+πε-α+α=α'αz z z z a a mm p p mm r r a mmr mm r mm r r mm r r 063.1623.23cos 20cos 5cos cos 94.15537.10757.483492.4223.23sin 37.107sin 1571.1923.23sin 57.48sin 37.10723.23cos 20cos 105cos cos 57.4823.23cos 20cos 5.47cos cos 2122112211=π=α'α='=+='+'='=⨯=α''=ρ'=⨯=α''=ρ'=⨯=α'α='=⨯=α'α='mm s e j mm a a m c r r a c mm m c h r r mm s p e mm inv inv inv inv r r r s s mm inv inv inv inv r r r s s t a f a f 7722.21228.6895.869.411025.4194.155)(25.41525.15.47)(895.81676.7063.161228.6)2023.23(37.107210537.10725)(21676.7)014904.0023791.0(14.970309.8)2023.23(57.4825.4757.4825)(221*21**11112222211111=-='-'='=--=-'+=--'='=⨯-=+-==-='-'='=-⨯-⨯π=α-α''-'='=-⨯-=-⨯-⨯π=α-α''-'='10—16一对渐开线直齿圆柱齿轮,已知m =2mm ,z 1=z 2=10, α=20︒, h a *=1,c *=0.25,用齿条刀范成加工,求其不发生根切的最小中心距a 'min 。
解:查渐开线函数表:10—17 一对高度变位齿轮,z 1=12,x 1=0.5,z 2=33,x 2=-0.5,m =20mm , α=20︒, h a *= 1,c *=0.25。
今将大齿轮2的齿数改为z'2=32,而小齿轮仍用原来的,中心距也不变,试确定大齿轮2'的变位系数x '2。
解:将大齿轮齿数改为z '2=32后,则有:4118.0171017min 5min *min 2min 1=-=-==z z z h x x a mm z z m a 20)1010(22)(221=+=+=04488.01010)4118.04118.0(20tan 2014904.0)(tan 22121=+++=++α+α=α' z z x x inv inv35.281228='=α'mm a a 3551.2135.28cos 20cos 20cos cos min =⨯=α'α='a mm z z m a '==+=+=450)3312(220)(221mm z z m a 440)3212(220)(221=+='+=0399.05.05399.05399.05399.0)014904.00238358.0(20tan 23212)(tan 20541232472.23)9188.0(cos )20cos 450440(cos )cos (cos 122121111=-=-='=-+=α-α'α+='+'''====α'=α'---x x inv inv z z x x a a10—18 已知一对渐开线直齿圆柱齿轮,z 1=15,x 1=0.3128,z 2=21,x 2=-0.1921,m =5mm , α=20︒, h a *=1,c *=0.25,试:(1) 判断在用齿条形刀具范成加工这两个齿轮时,是否会产生根切现象? (2) 求这对齿轮作无侧隙啮合传动时的中心距a '。