液压挖掘机负流量负荷传感控制策略
告诉你负载敏感、负流量、正流量三种系统真正的区别
告诉你负载敏感、负流量、正流量三种系统真正的区别1. 节能旁通流量控制系统节能性较好。
在主控阀全部中位时,旁通溢流阀开启,存在空流压力损失约3.5MPa,此时有最大的旁通流量损失。
操作手柄扳倒一半行程时,主泵流量仍有一部分通过六通滑阀的中立回路流回油箱。
先导传感控制系统节能性好。
由于主控阀为六通滑阀,仍然存在中位回油流量损失,但其比旁通流量控制系统小。
在主控阀中位时,回油背压小,仅0.5MPa左右。
当操作手柄行程加大,主泵流量和执行元件进油量随先导控制压力增加而增加。
在流量控制压力从最小到最大的调速范围内,主泵流量和执行元件进油量近似为等距曲线,流量损失变化不大。
负荷传感系统的节能性较好。
主控阀无串联的中立油路回油箱,因此没有主控阀的中位空流损失。
当操作手柄中位时,因为主泵没有备用流量,主泵的空载流量损失在理论上为零。
但是,在负荷传感主控阀的节流口存在固定的压力损失ΔP(2~2.9MPa),约为系统最高压力的6~8.5%。
当作业中流量增大时,功率损失(执行元件所需流量与压差ΔP的乘积)也不小。
复合作业各执行元件负荷压力相差很大时,由于泵流量只受最高负荷压力控制,主泵供油流量会多于执行元件需求流量之和,也会造成功率损失。
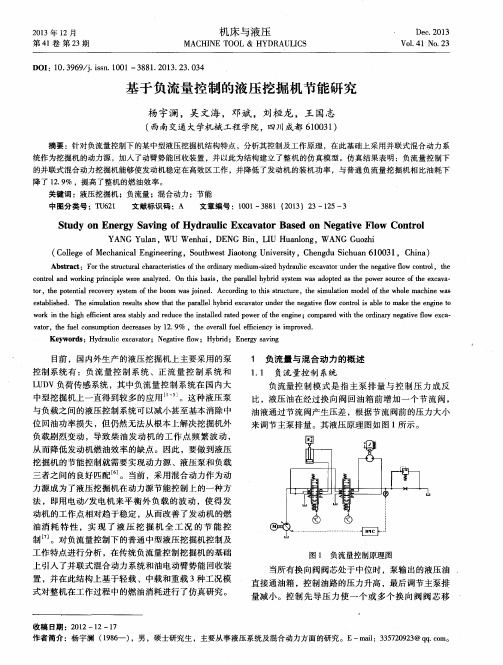
不同流量控制系统的扭矩特性比较如图1所示。
负荷传感控制系统中,主泵吸收的扭矩是变动的。
在额定功率点上,主泵按负荷压力的变化实时调整泵的排量(参看图1-a),因此主泵能够完全吸收发动机输出的扭矩。
旁通流量控制和先导传感控制则因负荷压力变化时,主泵流量调整有一个滞后过程,主泵吸收的扭矩不变,而且为防止发动机超负荷失速,主泵在匹配工作点吸收的扭矩,设计时低于发动机额定转速下输出的扭矩,将损失大约5~8%的功率。
(a)负荷传感系统 (b)其他流量控制系统图1 发动机与主泵的功率匹配需要说明的是,上述有关节能性的对比分析,仅针对流量控制而言。
某一机型是否节能,还要考虑是否采用混合动力技术、发动机本身的燃油消耗特性、发动机的调速特性及其动力适应控制(发动机-主泵功率的动态匹配)、液压主泵的负载适应控制、以及主控阀的负载适应控制等。
液压挖掘机的负荷传感技术
第16卷 增刊石家庄铁道学院学报V o l116 Supp1 2003年7月 JOU RNAL O F SH IJ I A ZHUAN G RA I L WA Y I N ST ITU TE Ju l12003液压挖掘机的负荷传感技术王满增1, 祖炳洁2, 贾粮棉2(11石家庄铁道学院教务处,河北石家庄 050043; 21石家庄铁道学院机械工程分院,河北石家庄 050043)摘要:以日本小松PC25液压挖掘机为例,系统分析液压负荷传感技术应用于挖掘机液压泵中,使泵的输出流量自动调节,减少压力损失,提高工作效率。
重点论述负荷传感器的工作原理。
关键词:挖掘机;负荷传感技术;流量控制中图分类号:TH137 文献标识码:A 文章编号:100623226(2003)S1201282031 引言液压负荷传感技术应用于挖掘机的液压系统中,可以控制一个或多个执行元件工作,微调性能非常好;可在满足机器各种控制功能的前提下,减少了压力损失,提高效率,有更佳的经济性、可靠性和先进性。
PC25挖掘机液压系统采用开式中心负荷传感系统(OL SS),该系统是以控制斜盘式柱塞泵斜盘角度的方法,根据外界负荷自动调节液压泵输出流量,以减少溢流和管路压力损失,达到提高发动机效率、节约能源的目的。
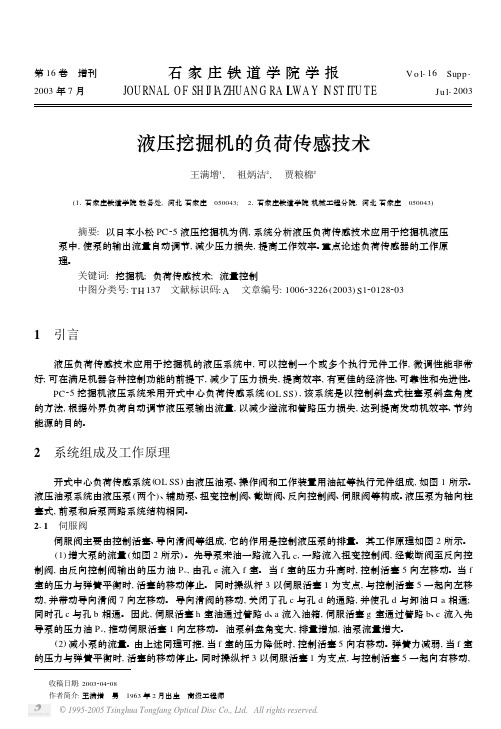
2 系统组成及工作原理开式中心负荷传感系统(OL SS)由液压油泵、操作阀和工作装置用油缸等执行元件组成,如图1所示。
液压油泵系统由液压泵(两个)、辅助泵、扭变控制阀、截断阀、反向控制阀、伺服阀等构成。
液压泵为轴向柱塞式,前泵和后泵两路系统结构相同。
211 伺服阀伺服阀主要由控制活塞、导向滑阀等组成,它的作用是控制液压泵的排量。
其工作原理如图2所示。
(1)增大泵的流量(如图2所示)。
先导泵来油一路流入孔c,一路流入扭变控制阀,经截断阀至反向控制阀,由反向控制阀输出的压力油P c,由孔e流入f室。
当f室的压力升高时,控制活塞5向左移动。
当f 室的压力与弹簧平衡时,活塞的移动停止。
挖掘机流量的正控与负控
挖掘机正流量控制系统是力士乐上世纪80年代的技术,主要特点是:操纵手柄的先导压力不仅控制换向阀,还用来调节油泵的排量。
执行元件不工作的时候,油泵上没有先导压力,斜盘摆角最小,油泵只输出少量的备用流量。
操纵先导手柄,则液压先导回路中建立起与手柄偏转量成比例的压力来控制换向阀阀芯的位移和泵的排量。
挖掘机油泵的流量和由此产生的执行元件的工作速度与先导压力-控制压力成正比例。
挖掘机负流量控制系统,也是力士乐上世纪80年代的技术,主要特点是:按主操纵阀回油量的大小即主操纵阀阀后节流孔前建立相应的控制压力调节主油泵的排量。
主油泵的排量与该控制压力成反比。
挖掘机正流量液压系统对于一些业内人士来讲可能比较陌生,其主要特点是主泵的排量与先导操作手柄输出的信号压力成正比。
主控制器根据先导压力信号及其变化趋势判断执行器的流量需求及其变化趋势,并据此对主泵排量实施调节,以使系统的流量供应能够动态跟随执行元件的流量需求,实现系统流量的实时匹配,达到“所得即所需”。
该系统相对负流量系统中位流量损失小,相对负载敏感系统则可靠性高,复合动作更节能。
该系列机器比其它机型工作效率提高了8%左右,能耗下降了10%左右挖掘机负流量控制系统是指液压泵输出油液通过操纵阀(换向阀)阀杆的控制将油分成两部分:一部分去液压缸或液压马达,是有效流量,另一部分通过阀中位回油道回油箱,为浪费的流量。
为控制这部分浪费流量,使它保持在尽可能小的范围内,在操纵阀中位回油道上加一个节流孔,通过节流孔产生压差,将节流口前压力引至泵排量调节机构来控制泵的排量。
通过节流孔的流量越大,则节流口前先导压力越大,泵排量越小。
泵变量机构的控制压力(先导压力)与泵排量呈反比关系,故称为负流量控制。
这种控制方式能减少流量损失。
您现在明白挖掘机流量的正控与负控了吗?。
液压挖掘机的三种流量控制方式

液压挖掘机的三种流量控制方式摘要:在液压挖掘机的负载适应控制策略中,负流量(Negative Flow Control)、正流量控制(Positive Flow Control)及负荷传感器控制(Load Sensing Control)三种流量控制方式的流行称谓,是按其泵控特性来分类的。
本文通过对多种厂牌型号挖掘机的比较分析,提出了旁通流量控制(By-pass Flow Control)、先导传感控制(Pilot Sensing Control)及负荷传感控制的分类。
这一分类方法,对于设计时比较不同控制系统的性能和维修时理解不同控制系统结构和功能的特点,都有所裨益。
1.流量控制在挖掘机的液压系统内,流量Q、压力P及能耗(流量损失ΔQ、压力损失ΔP)等参数的变化,反映了液压传动过程的控制特性。
液压系统工作时,压力P不是系统的固有参数,而是由外负荷决定的。
因此,当发动机转速n e一定时,要对液压系统的功率进行调节,其实是对液压缸、液压马达等执行元件的进油量Q a进行调节(参看图1)。
图1.流量调节如图2所示,有两种方法调节系统流量。
第一种方法是泵控方式,通过改变主泵的每转排量q来调节主泵的输出流量Q p,称为容积调速。
常见的容积调速方式包括:①利用主泵出口压力P P与主泵排量q的乘积保持不变的恒扭矩控制;②利用发动机转速传感(ESS)使主泵吸收的扭矩p P q与主泵转速n的乘积保持不变的恒功率控制;③在临近系统溢流压力时,减小主泵排量的压力切断控制;④配用破碎头等作业附件时,由外部指令限定主泵最大排量的最大流量二段控制;⑤双泵系统中,利用两泵出口压力的平均值与主泵流量乘积保持不变的交叉功率控制(相加控制或总功率控制);⑥多泵系统中,因主泵组的液压总功率大于发动机的输出功率,为防止发动机出现失速,采用了极限负荷控制。
除了容积调速,还有一种泵控方式是通过动力模式下的变功率控制,利用外部指令设定不同工况下不同的发动机输出功率来改变主泵转速n e,从而调节主泵输出流量Q=nq。
负荷传感液压控制技术及其在工程机械中的应用
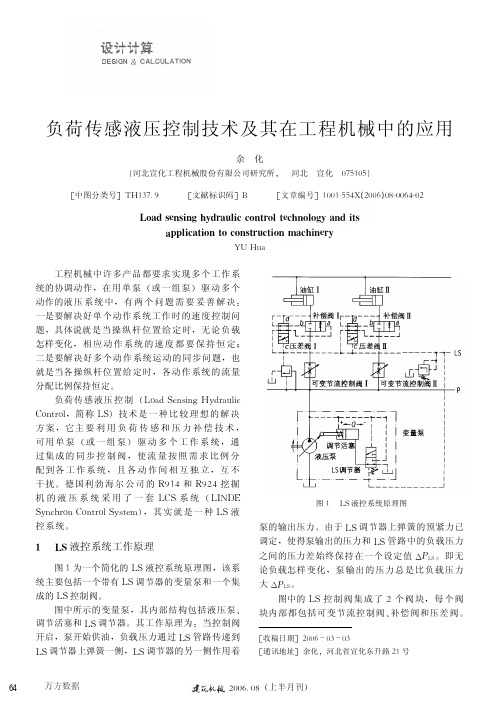
式中!&) ) )节流孔流量( ) )节流孔流量系数( ’ ! ?) ) )节流孔面积( !( ") ) )压力差( !) " ) ) )流体密度% ! 由于可变节流控制阀 # 上的压力降总是保持 # 因此# 只要可变节流控制阀 恒定 ! !." !8 " @" 即操纵杆位置给定 " # #的节流口面积一经调定 ! 流量就不再受负载变化的影响而保持恒定# 即油 缸#的运动速度保持恒定不变% 2 8 3 !两个油缸同时工作时 # 油缸 $ 假设油缸 # 的负载压力 ! " J 7 4 ) .! % 当控制阀 # 完全打开并 的负载压力 ! * J 7 4 ! .) 向油缸 # 供油时# 开始操纵打开控制阀 $% 这时 如 8 @管路中的压力仍然等于油缸 # 的负载压力 ! 果多个控制阀同时打开# 则 8 @ 压力等于压力值最 高的油缸的负 载 压 力 " #即 有 ! # " J 7 4 ) * .! ) .! 并且这个压力也作用于压差阀$的E端上# 推动压
个可变节流控制阀的流量现在只的关系一个油缸单独工作时所有的上的压力均为零当需要油打开cm压力通过压差阀作用到补偿阀泵的压力经过控制阀端建立同时也传递到cm管路中一旦补偿阀端压力推动阀芯移动补偿阀开启此时油泵开始向油缸供油这时cm调节器也开始工作以保证泵的输出压力和cm压力之间的压力差始终保持在设cm调节器预先调定而与负载变化无关根据流体学中薄壁节流孔的流量公式282通过
!!工程机械中许多产品都要求实现多个工作系 统的协调动作# 在用单泵 ! 或一组泵 " 驱动多个 动作的液 压 系 统 中# 有 两 个 问 题 需 要 妥 善 解 决& 一是要解决好单个动作系统工作时的速度控制问 题#具体说就是当操纵杆位置给定时# 无论负载 怎样变化# 相 应 动 作 系 统 的 速 度 都 要 保 持 恒 定( 二是要解决好多个动作系统运动的同步问题# 也 就是当各操纵杆位置给定时# 各动作系统的流量 分配比例保持恒定% 负荷传感 液 压 控 制 ! 8 > 4 ?@ , A / ? C 4 6 D / E 0’ B # 简称 8 " 技术是 一 种 比 较 理 想 的 解 决 9 > : C > D @ 方案 # 它主 要 利 用 负 荷 传 感 和 压 力 补 偿 技 术 # 可用单 泵 ! 或 一 组 泵 " 驱 动 多 个 工 作 系 统# 通 过集成 的 同 步 控 制 阀 # 使 流 量 按 照 需 求 比 例 分 配到各 工 作 系 统 # 且 各 动 作 间 相 互 独 立 # 互 不 干扰 % 德国利 勃 海 尔 公 司 的 F + ) ’和 F + ! ’挖掘 ! 机的液压系统采用了一套 8 系 统 9 @ 8 G ) H I " # 其 实 就 是 一 种 液 8 @ E 5 C > -9 > : C > D @ A : , ; @ B B 控系统 4; ! " " # $ " %!
基于负流量控制的液压挖掘机节能研究
w o r k i n t h e h i g h e f f i c i e n t a r e a s t a b l y a n d r e d u c e t h e i n s t ll a e d r a t e d p o w e r o f t h e e n g i n e ;c o mp a r e d wi t h t h e o r d i n a r y n e g a t i v e f l o w e x c a -
Ab s t r a c t :F o r t h e s t r u c t u r a l c h a r a c t e r i s t i c s o f t h e o r d i n a r y me d i u m- s i z e d h y d r a u l i c e x c a v a t o r u n d e r t h e n e g a t i v e l f o w c o n t r o l ,t h e c o n t r o l a n d wo r k i n g p in r c i p l e we r e a n a l y z e d .O n t h i s b a s i s ,t h e p a r a l l e l h y b i r d s y s t e m wa s a d o p t e d a s t h e p o w e r s o u r c e o f t h e e x c a v a —
t o r , t h e p o t e n t i l a r e c o v e r y s y s t e m o f t h e b o o m w a s j o i n e d .A c c o r d i n g t o t h i s s t uc r t u r e , t h e s i m u l a t i o n m o d e l o f t h e w h o l e m a c h i n e w a s
LUDV负荷传感系统在液压挖掘机上的应用
!"#$负荷传感系统在液压挖掘机上的应用张海涛,何清华,施圣贤,阳昶(中南大学机电学院,湖南长沙%&’’())[摘要]不受载荷影响的流量分配系统(!"#$)是一种广泛应用于各类挖掘机的液压系统,系统只采用一个变量泵,省掉了复杂的合流控制系统,减小了系统的安装尺寸,使系统的结构变得更简单。
它既具有传统负荷传感控制系统节能增效的优点,又通过后置压力补偿阀解决了在工作系统要求的流量大于泵的极限流量时的各工作装置实现复合动作的问题。
介绍了!"#$负荷传感系统的组成,并在对传统负荷传感控制系统的优缺点进行分析的基础上,对!"#$系统工作原理、系统特点、工业应用和检测结果作了详细说明。
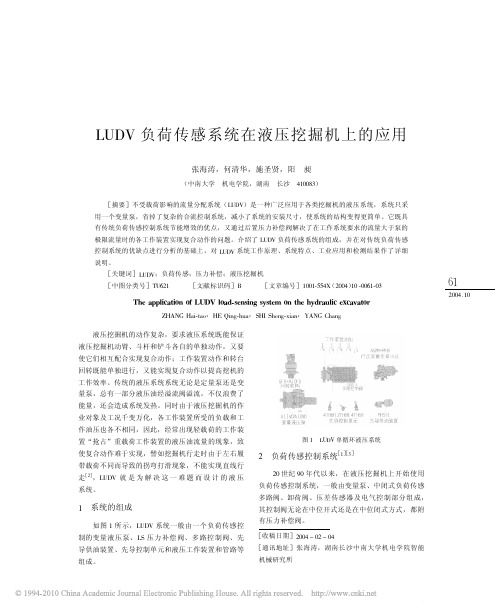
[关键词]!"#$;负荷传感;压力补偿;液压挖掘机[中图分类号]*"+,&[文献标识码]-[文章编号]&’’&.//%0(,’’%)&’.’’+&.’)!"#$%%&’($)’*+*,-./0&*$123#+3’+4353)#6*+)"#"517$8&’(#9($:$)*712345267.869,2:;7<=.>?6,@2A @>B<=.C76<,D345E>6<=液压挖掘机的动作复杂,要求液压系统既能保证液压挖掘机动臂、斗杆和铲斗各自的单独动作,又要使它们相互配合实现复合动作;工作装置动作和转台回转既能单独进行,又能实现复合动作以提高挖机的工作效率。
传统的液压系统系统无论是定量泵还是变量泵,总有一部分液压油经溢流阀溢流,不仅浪费了能量,还会造成系统发热。
同时由于液压挖掘机的作业对象及工况千变万化,各工作装置所受的负载和工作油压也各不相同,因此,经常出现轻载荷的工作装置“抢占”重载荷工作装置的液压油流量的现象,致使复合动作难于实现,譬如挖掘机行走时由于左右履带载荷不同而导致的拐弯打滑现象,不能实现直线行走[,],!"#$就是为解决这一难题而设计的液压系统。
挖掘机节能液压控制系统的应用研究
126研究与探索Research and Exploration ·工艺流程与应用中国设备工程 2023.12(下)液压挖掘机系统主要包括电源系统、液压系统、传动系统以及行走系统,这些系统之间能够相互作用,操作人员就能够通过改变挖掘机的位置及状态,对各项工程作业进行调整优化,但液压挖掘机控制系统在实际应用过程中,还存在能源消耗以及无功功率损失等一系列问题,这就需要操作人员明确挖掘机节能液压控制系统的应用,明确节能液压系统的发展趋势,最大程度降低液压挖掘机的能源浪费,真正实现液压挖掘机应用的节约能源和降低排放,进而提升挖掘机节能液压控制系统的可靠性以及液压元件的使用寿命。
1 挖掘机能耗分析我国现阶段,很多工程项目中都开始广泛应用挖掘挖掘机节能液压控制系统的应用研究张佳楠 (济宁迈斯伯尔机械股份有限公司,山东 济宁 272000)摘要:随着社会经济不断发展,液压挖掘机的实际需求逐渐增长,这就对液压挖掘机的运用效率和质量提出了更高要求,然而,由于液压挖掘机的使用量普遍比较大且耗油量严重,使得挖掘机节能液压控制系统已经成为人们重点关注的内容。
基于此,本文通过分析挖掘机能耗,研究液压挖掘机负流量控制、正流量控制以及负载敏感系统的工作原理,进而提出液压挖掘机节能液压控制系统相关方式,为挖掘机的后续使用提供一定参考依据。
关键词:挖掘机;节能液压;控制系统;应用研究中图分类号:TU621 文献标识码:A 文章编号:1671-0711(2023)12(下)-0126-03机,然而,挖掘机前期设备质量可移动的能量臂在实际工作过程中,容易产生极大的能量损失及损耗,挖掘机液压机构也会被转换成油温升高,面对这样的情况,挖掘机的运作效率和质量也会降低,甚至会影响挖掘机的使用寿命和期限,再加上挖掘机的大范围使用,各行业中大部分土渣都需要借助挖掘机进行处理,这就会造成挖掘机的燃料消费比较高,尾气排除更加劣质,直接引起了挖掘机行业对该问题的重点关注。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4 结束语
在挖掘机器人上的试验表明, 提出的负流量负 荷传感控制克服了传统负流量控制的不足, 不仅具 有良好的节能性, 同时能提高系统的操纵性。这种负 流量负荷传感控制策略不仅适用于挖掘机器人, 对 所有采用六通多路阀的系统都有适用价值, 具有结 构简单、成本低、控制效果好的特点。
Abstract
T he principle and short age of a negat iv e contr ol syst em, w hich is w idely used in hy draulic excav ato r at present , w ere analyzed, and a new method called “neg ative load sensing contr ol sy st em”w as pr opo sed. T his syst em w as successf ully used in an exper im ent al ex cavat ing robot . T he principle of this m et hod is based o n t he comm on negat ive f low contro l sy st em , and its by pass pr essure of t he valv e is cont rolled according t o t he max lo ad pressure of t he cyl inders. W it h t his met ho d, t he pressur e reduct ion of valve met ering w as r educed and t he co nt rol labilit y of sy st em w as im pro ved.
810929, 1981. 3 陶永华, 伊怡欣, 葛芦生 编著. 新型 P ID 控制及其应用. 北京: 机械工业出版社, 1992. 4 高峰, 冯培恩. 试验型挖掘机器人柔性液压系统方案设计. 工程设计, 2001( 3) : 105~108
20 05年7 月
农业机械学报
第 36 卷 第 7 期
液压挖掘机负流量负荷传感控制策略*
高 峰 潘双夏
【摘要】 针对目前液压 挖掘机上常用的负 流量控制系 统的不足, 提出了 一种负流 量负荷传感 控制策略, 并应
用于一台试验型液压挖掘机器人上。控制策略的 原理是在负流量控 制的基础上, 使旁路回油设定压 力随外负载的
础上动态设定旁路回油压 力, 使 p OCOM 总 比最大负 载压力高出一个小的固定值( 例如 0. 5 M Pa) , 如
P OCOM = m ax( p 11, p 12 , p 21 , p 22 ) + 0. 5 ( 2)
式中 p 11 、p 12 、p 21 、p 22——液压缸各腔的负载压力 可以通过图 2 中的梭阀组将其中的最大压力引
将负流量负荷传感控制原理应用于挖掘机, 其 液压系统原理如图 2 所示。系统由电液比例泵、六通
图 2 负流量负荷传感控制结构图
Fig. 2 Str uct ur e of neg ativ e lo ad sensing co nt ro l sy st em 1. 动臂油缸 2. 铲斗油缸
多路阀( 用电液比例先导控制) 、梭阀组成, 采用计算
变化而变化, 在减小多路阀旁路回油节流损失的同时, 提高了系统的操纵性。应用结果表明, 效果良好。
关键词: 液压式挖掘机 负流量控制 控制方法
中图分类号: T U 621
文献标识码: A
A Sensing Control System of Negative Load
Gao Feng Pan Shuangx ia ( Zhej iang Univer si ty )
图 3 为挖掘机器人作三角形轨迹的伺服控制时 ( 循环两次) , 用来控制回转、斗杆的多路阀旁路回油 压力、泵输出压力、最大负载压力、泵排量随时间的 变化情况, 数据由控制系统计算机记录得到。图 3a 中, 为保证伺服系统进行正常的轨迹跟踪, 旁路回油 压力设定在较高的 7 M Pa, 以便能比较容易地克服 负载( 压力过低将严重影响系统响应) ; 图 3b 中, 旁
因此, 在传统的负流量控制中, 节能性与操纵性 之间的矛盾难以协调。
2 负流量负荷传感控制原理
在六通多路阀中, 负载对阀口流量特性的影响 是由系统的起始压力低于负载压力引起的。此时, 在 图 1 中的单向阀的作用下, 泵输出的液压油全部通 过旁路回油口流回油箱, 液压缸速度为零。直到阀心 移动将 O 口逐渐关闭, 系统压力升高到足以克服负 载压力后, 液压缸才开始移动。如果使系统压力始终 高于负载压力, 则系统的调速性将会有较大改善, 响 应速度加快。在负流量控制中, 泵输出压力始终高于 旁路回油压力, 因此, 旁路回油压力的改变也将引起 泵输出压力的改变。利用这种特性, 如果控制旁路回 油压力始终比负载压力高一点, 就能使泵输出压力 始终比负载压力高, 在任何情况下都能使系统保持 较好的调速性, 这就是负流量负荷传感控制原理。
都基本不变。由于旁路回油设定压力较高, 因此无论
在节流口上, 还是在通向液压缸的工作油口上, 都存 在较高的压力损失。而系统采用负流量负荷传感控
制后, 由于旁路回油压力和泵输出压力都能随外负
参考
图 4 三角形轨迹跟踪效果 F ig . 4 T racing result follow ing a t riang le shape tr ack
k
∑ qNEG ( k) = K Pe( k) + K I e( j ) + j= 0
( 1)
K D[ e( k ) - e( k - 1) ]
k- 1
∑ ( - qI ≤ e( j ) ≤ qI) j= 0
式中 p OCOM —— 旁路回油节流口处压力设定值, 是 负流量控制器的控制目标
机控制技术和数字 P ID 控制策略[ 3] , 在一台试验型 挖掘机器人[ 4] 上对这种控制策略进行了试验。其中,
梭阀组的作用是取得系统最高负载压力, 并将其送
往控制器。其中的负流量控制算法为
p O COM - p O ( k) ( e( k ) > ûEû)
e( k) =
0
( e( k ) ≤ ûEû)
p O——节流口前的旁路回油压力检测值 e —— 实 际旁 路回 油压 力与 设定 值之 间误 差
k ——采样序号 qNEG ——由负流量 P ID 控制器算出的泵排量
K P、K I 、K D —— P ID 控 制器的比 例、积分 和
微分常数
qI ——积分饱和上限
E——误差死区设定值 为实现负流量负荷传感控制, 需要在式( 1) 的基
载的变化而变化( 最大负载压力和旁路回油压力试 验曲线几乎重合) , 因此工作油口上的压 力损失较 小, 而旁路回油节流口上的压力损失也大大减小。从 图 3 中还可以看出, 负流量负荷传感系统的工作压 力比传统负流量控制系统低得多, 而且完成同样的 工作时泵排量也较小( 两图中的数据都是在泵转速 为 2 200 r / min 下测得) , 说明负流量负荷传感控制 具有更好的节能性。
1 传统负流量控制分析
传统的液压挖掘机负流量控制系统原理可简化
为图 1 所示形式, 六通多路阀可简化为 A、B、O 等 3 个联动的可变节流口。由于负流量控制在本质上是
一种恒流量控制系统, 通过在多路阀旁路回油通路 上设置流量检测元件( 如图 1 中所示的节流口) , 控 制旁路回油流量为恒定值。根据图 1, 通过节流口的 流量与节流口前的压力有关, 因此恒流量控制就可 以转化为恒压力控制, 压力检测点位于多路阀旁路 回油口 O 和流量检测节流口之间的 D 点, 即控制 D 点的压力为恒定值。
circuit w hen tr acing fo llow ing a triangle shape tr ack ( a) 传统负流量控制 ( b) 负流量负荷传感控制
路回油压力随外负载的变化而变化。从图中可以看
出, 在机器人的伺服控制中, 当采用负流量控制时,
无论外负载如何变化, 旁路回油压力和泵输出压力
11 2
农 业 机 械 学 报
2 0 0 5 年
图 1 负流量控制原理图 F ig . 1 P rinciple of neg ativ e flo w co nt ro l
口的流量为定值, 只要调整阀心位置改变 A 口和 O 口的通流面积比, 就能实现液压缸的速度调节。
在采用六通多路阀的系统中, 阀口的流量特性 ( 即 A 口流量随阀心移动而变化的关系) 受负载影 响较大[ 2] 。如果泵在挖掘机空载条件下输出压力较 高, 则可以降低这种影响。在负流量控制中, 图 1 中 旁路回油压力( 即 D 点压力) 的大小直接影响泵输 出压力。D 点设定压力高, 则泵输出压力也高, 系统 克服外负载能力强, 系统调速性较好, 响应迅速, 司 机操作时无滞后感; 反之, 系统调速性较差, 操作时 的滞后感较强。但是, D 点压力过高会带来以下问 题: 增加了流量检测节流口上的功率损失, 而且有可 能在节流口上产生空穴现象; 当负载压力较低时, A 口上的压力损失加大, 同样引起功率损失的增加。
出。
将式( 1) 和式( 2) 结合起来, 就构成了负流量负
荷传感控制策略。由于挖掘机器人在作伺服控制时, 对系统响应速度要求较高, 而负流量负荷传感控制
恰好能满足这种要求, 而且受负载影响不大, 同时又
保持了负流量控制的节能性。
第 7 期
高峰 等: 液压挖掘机负流量负荷传感控制策略
1 13
3 试验分析