电液伺服加载系统四连杆机构控制器设计
第7章 电液伺服系统的设计和应用
最大负载力为:32900N; 最大负载速度:0.022m/s
找阀控缸动力机构的输出特性与该负载轨迹相切, 并使两者的最大功率点尽量靠近,负载轨迹的最大 功率点可通过求导数并令其为零求得,其值为:
F 24860 N
v 0.0193 m / s
液压动力机构的最大功率点公式为:
2 F Ps A 3
欢 迎 使 用
《液压伺服与比例控制系统》
多媒体授课系统
燕 山 大 学
《液压伺服与比例控制系统》课程组
第7章 电液伺服系统的设计和应用
本章摘要
工程上常用频率法设计液压伺服系统,这是一种 试探法。根据技术要求设计出系统以后,需要检 查所设计的系统是否满足全部性能指标。如不能 满足,可通过调整参数或改变系统结构(加校正) 等方法,重复设计过程,直至满足要求为小。因 为设计是试探件的,所以设计方法具有较大的灵 活性。
Q0 I 1.1 10 5 s2 2 * 0.56 ( s 1) 2 250 250
光电检测其和伺服放大器可看成比例环节:
I K E
增益K可通过改变伺服放大器的增益在较宽的范围 内调整。计算液压缸的容积时,考虑到管道容积, 加上系数:
Vt LA 1.15 0.15 94.25 10 4 1.15 1.626 10 3 m 3
y 0.5E 1 10 3 m
系统的开环增益为:
vm Kv 22(1 / s) y
对上述系统进行动态分析:
5、修改动力机构参数,改善系统性能 (1)、确定活塞面积 系统不加校正,为保证增益和足够的稳定裕量,至 少应有: 4K 4 22 88rad / s
2、方案选择 选择合理控制方案,拟定大体结构,绘制系统原理方块图; 3、静态计算 根据系统要求和负载条件,选择动力机构的形式和参数。 (1)、确定供油压力; (2)、通过负载轨迹,求驱动力机构的匹配参数; (3)、选择伺服阀,根据系统的工作状态及精度要求, 确定系统的开环增益,选择传感器、放大器和其他元件; 4、动态分析计算。 (1)、列出各元件运动方程,求传递函数;。 (2)、绘出系统方块图、开环和闭环频率特性,分析系 统的稳定性,校核系统的频宽和峰值; (3)、通过仿真分析系统动态品质指标。
电气工程中电液伺服系统的建模与控制

电气工程中电液伺服系统的建模与控制电液伺服系统在电气工程中扮演着重要的角色,它是将电力和液压技术相结合的一种控制系统。
本文将探讨电液伺服系统的建模与控制方法,旨在帮助读者深入了解该系统的原理和应用。
1. 引言电液伺服系统是一种将电力与液压技术相结合的控制系统,它具有快速、精确以及大扭矩输出的特点,广泛应用于工业自动化领域。
该系统通常由液压执行机构、液压装置、电机、传感器以及控制器等组成。
2. 电液伺服系统的建模电液伺服系统的建模是理解系统行为和进行控制设计的重要基础。
一般来说,电液伺服系统的建模可以分为力平衡模型和压力平衡模型两种。
2.1 力平衡模型力平衡模型是基于力学平衡原理建立的,它通过分析液体在液压缸内的流动以及液压缸和负载之间的力平衡关系来描述系统行为。
该模型主要考虑了负载的机械特性以及阀门的开度对液体流量和压力的影响。
2.2 压力平衡模型压力平衡模型是基于流体的压力平衡原理建立的,它通过分析液体在液压缸内的流动以及阀门的开度对液体流量和压力的影响来描述系统行为。
该模型不考虑负载的机械特性,主要关注液体流动的特性以及阀门对压力的调节。
3. 电液伺服系统的控制电液伺服系统的控制主要包括位置控制、速度控制和力控制三种。
在控制设计中,通常使用比例积分微分(PID)控制器或模糊控制器来实现系统性能的改善。
3.1 位置控制位置控制是电液伺服系统中最常见的一种控制方式。
它通过控制液压缸的位置来实现对负载的准确控制。
在控制设计中,可以根据负载的特性选择适当的控制方法,如PID控制器或模糊控制器。
3.2 速度控制速度控制是电液伺服系统中实现对负载速度精确控制的一种方式。
在速度控制中,控制器通常根据传感器反馈的速度信号来调节液压缸的速度。
PID控制器常被用于速度控制中,通过调节比例、积分和微分参数来改善系统的响应性能。
3.3 力控制力控制是电液伺服系统中实现对负载施加特定力的控制方式。
在力控制中,控制器通常调节液压缸施加的力来满足特定的要求。
电液伺服系统及其控制文档
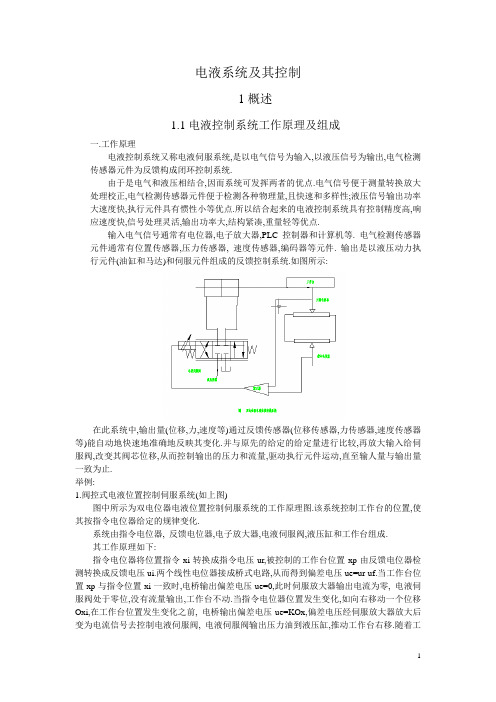
电液系统及其控制1概述1.1电液控制系统工作原理及组成一.工作原理电液控制系统又称电液伺服系统,是以电气信号为输入,以液压信号为输出,电气检测传感器元件为反馈构成闭环控制系统.由于是电气和液压相结合,因而系统可发挥两者的优点.电气信号便于测量转换放大处理校正,电气检测传感器元件便于检测各种物理量,且快速和多样性;液压信号输出功率大速度快,执行元件具有惯性小等优点.所以结合起来的电液控制系统具有控制精度高,响应速度快,信号处理灵活,输出功率大,结构紧凑,重量轻等优点.输入电气信号通常有电位器,电子放大器,PLC控制器和计算机等. 电气检测传感器元件通常有位置传感器,压力传感器, 速度传感器,编码器等元件. 输出是以液压动力执行元件(油缸和马达)和伺服元件组成的反馈控制系统.如图所示:在此系统中,输出量(位移,力,速度等)通过反馈传感器(位移传感器,力传感器,速度传感器等)能自动地快速地准确地反映其变化.并与原先的给定的给定量进行比较,再放大输入给伺服阀,改变其阀芯位移,从而控制输出的压力和流量,驱动执行元件运动,直至输人量与输出量一致为止.举例:1.阀控式电液位置控制伺服系统(如上图)图中所示为双电位器电液位置控制伺服系统的工作原理图.该系统控制工作台的位置,使其按指令电位器给定的规律变化.系统由指令电位器, 反馈电位器,电子放大器,电液伺服阀,液压缸和工作台组成.其工作原理如下:指令电位器将位置指令xi转换成指令电压ur,被控制的工作台位置xp由反馈电位器检测转换成反馈电压ui.两个线性电位器接成桥式电路,从而得到偏差电压ue=ur-uf.当工作台位置xp与指令位置xi一致时,电桥输出偏差电压ue=0,此时伺服放大器输出电流为零, 电液伺服阀处于零位,没有流量输出,工作台不动.当指令电位器位置发生变化,如向右移动一个位移Oxi,在工作台位置发生变化之前, 电桥输出偏差电压ue=KOx,偏差电压经伺服放大器放大后变为电流信号去控制电液伺服阀, 电液伺服阀输出压力油到液压缸,推动工作台右移.随着工作台的移动, 电桥输出偏差电压逐渐减小,当工作台移动Oxp等于指令电位器位移Oxi时, 电桥输出偏差电压为零, 工作台停止移动.反之亦然.系统的工作原理方块图如下:2.泵控式电液速度控制伺服系统该系统的液压动力执行元件由变量泵和液压马达组成,变量泵既是液压能源又是液压控制元件.由于操纵变量机构所需要的力较大,通常采用一个小功率的液压放大装置作为变量控制机构.如图所示为一泵控式电液速度控制伺服系统的原理图.图中所示系统采用阀控式电液位置控制机构作为泵的变量控制机构. 液压马达的输出速度由测速发电机检测,转换为反馈电压信号uf,与输入指令电压信号ur相比较,得出偏差电压信号ue=ur-uf,作为变量控制机构的输入信号.当速度指令为ur0时, 负载以某个给定的转速w0工作,测速机输出反馈电压uf0,则偏差电压ue0=ur0-uf0,这个偏差电压对应于一定的液压缸位置,从而对应于一定的泵流量输出,此流量为保持负载转速w0所需的流量.如果负载变化或其它原因引起转速变化时,则uf 不等于uf0,假如w大于w0,即uf大于uf0,则ue=ur0-uf小于ue0,使液压缸输出位移减小,使泵输出流量减小,液压马达转速自动下调至给定值.反之,如果转速下降,则uf小于uf0,则ue=ur0-uf大于ue0,使液压缸输出位移增大,使泵输出流量增大,液压马达转速自动回升至给定值.结论: 速度指令一定时, 液压马达转速保持恒定;速度指令变化时, 液压马达转速也相应变化.系统的工作原理方块图如下:二.电液伺服控制系统组成1.输入元件---其功用是给出输入信号加于系统的输入端.可以是机械的,电气的等如靠模,电位器,计算机等.2.反馈测量元件---测量系统输出并转换为反馈信号.如各类传感器(位置传感器,压力传感器,速度传感器等).3.比较元件---将输入信号与反馈信号进行比较,给出偏差信号.4.放大转换元件---将偏差信号放大,转换成液压信号.妲伺服放大器,电液伺服阀等.5.执行元件---产生调节动作加于控制对象上,如液压缸和液压马达等.6.控制对象---被控制的设备等,即负载.7.液压能源装置及各种校正装置等.1.2电液伺服控制的分类电液伺服控制系统可按不同的原则分类,基本上有五大类.一.按被控对象的物理量名称分类1.位置伺服控制系统主要是控制被控对象的位置精度的伺服控制系统,妲机床工作台的位置,板带轧机的板厚,振动试验台等系统.2.速度伺服控制系统主要是控制被控对象的速度精度的伺服控制系统,如原动机的调速,雷达天线的速度控制等.3.力伺服控制系统以力为被调量的伺服控制系统,如材料试验机,轧机张力控制系统等.二.按执行元件的控制方式分类1.阀控式伺服控制系统利用伺服阀控制的伺服控制系统称为阀控式伺服控制系统.它又可分为阀控缸系统和阀控马达系统两种.其优点是响应速度快,控制精度高,结构简单.缺点是效率低.2.容积式伺服控制系统利用变量泵或变量马达控制的伺服控制系统称为容积式伺服控制系统.它又可分伺服变量泵系统和伺服变量马达系统.三.按系统输入信号的变化规律分类1. 定值控制系统当系统输入信号为定值时称为定值控制系统.它的任务是将系统的实际输出量保持在希望值上.2. 程序控制系统当系统输入信号为按预先给定的规律变化时称为程序控制系统..3. 伺服控制系统伺服控制系统又称随动系统,其输入信号是时间的未知函数,而输出量能够准确快速地复现输入量的变化规律.四.按信号的方式分类1.模拟信号控制系统系统中全部信号都是连续的模拟量的系统称之.2.数字信号控制系统系统中全部信号都是数字量的系统称之.3. 数字-模拟混合控制系统系统中部分信号是数字量部分信号是模拟量的系统称之.五.按信号传递介质的形式分类1.机液伺服控制系统输入信号给定,反馈测量和比较均用机械构件实现的系统称之.2.电液伺服控制系统用液压动力元件,偏差信号的检测校正和初始放大等均用电气电子元件实现的系统称之.1.3电液伺服控制的优缺点一. 电液伺服控制的优点1.液压元件功率-重量比和力矩-惯量比(力-质量比)大,因而结构紧凑,体积小,重量轻,用于中大型功率系统优点更明显.比较举例:电气元件:最小尺寸取决于有效磁通密度,而有效磁通密度又受磁性材料的磁饱和限制;功率损耗产生的发热量散发又比较困难.因此功率-重量比和力矩-惯量比小,结构尺寸大.液压元件:功率损耗产生的发热量由油带到散热器去散热,其最小尺寸取决于最大工作压力,而工作压力可以很高(通常可达32MPa),因而元件尺寸小,重量轻, 功率-重量比和力矩-惯量比大.同功率:液压泵重量/电动机重量=10%-20%液压泵尺寸/电动机尺寸=12%-13%液压马达功率重量比=10倍相当容量的电动机液压马达力矩-惯量比=10-20倍电动机2.液压动力元件快速性好,系统响应快.加速能力强,能高速起动和制动.3.液压伺服系统抗负载的刚度大.二. 电液伺服控制的缺点1.液压元件抗污染能力差,对工作介质清洁度要求高.工作介质随温度变化而变化,对系统性能有影响.2. 液压元件制造精度高,成本高,且若元件的密封制造使用不当,易外漏,造成环境污染.3.液压能源传输不如电气系统方便2 电液伺服阀电液伺服阀是电液伺服系统中的主要元件,它既是电液转换元件,又是功率放大元件.它能够把微小的电信号转换成大功率的液压能(流量和压力),是电液伺服控制系统的核心和关键.电液伺服阀的输入信号是由电气元件来完成的,由它再转换成液压流量和压力,输出给执行机构,实现对执行机构各物理量的控制.2.1电液伺服阀的组成与分类一.组成电液伺服阀通常由力矩马达,液压放大器,反馈机构三部分组成.以下图的两级中力反馈式电液伺服阀为例,简单介绍如下:图中上半部为力矩马达,下半部为液压放大器(由四通滑阀组成的液压放大器), 反馈机构则由反馈杆11组成.它们的作用分别是:1.力矩马达(力马达)将输入的电信号转换成力矩或力控制液压放大器运动.2.液压放大器控制液压能源流向执行机构的流量和压力.3.反馈机构使伺服阀输出的流量和压力获得与输入信号相应的特性.二.分类电液伺服阀的种类很多,按不同的结构和机能常有以下几种分类:1.按输出量的控制功能分有:电液流量伺服阀---主要控制输出的液流流量特性,即在额定输入信号范围内,具有线性流量控制特性.电液压力伺服阀---在额定输入信号范围内,具有线性压力控制特性.电液压力-流量伺服阀---在额定输入信号范围内,具有线性压力-流量控制特性.2.按液压放大器的级数分有:单级伺服阀---只有一级放大元件.结构简单,价格低廉,但输出力和力矩小,输出流量小,对负载变化敏感.用于低压小流量和负载变化不大的场合.两级伺服阀---有两级放大元件.它克服了单级伺服阀的缺点,是最常用的型式.三级伺服阀---由一个两级伺服阀作前置级,控制第三级功率滑阀.通常只用于大流量(200L/min)以上的场合.3.按第一级阀的结构分有:滑阀---第一级阀的结构是滑阀.此类阀流量和压力增益高,输出流量大,对油清洁度要求较低.但加工复杂,分辨率低,响应慢,滞环较大,阀芯受力大.喷咀挡板--- 第一级阀的结构是喷咀挡板. 此类阀灵敏,动态响应快,线性度好.但对油清洁度要求高,挡板受力小,驱动功率小.射流管--- 第一级阀的结构是射流管阀. 此类阀抗污染强,但动态响应慢,受油温响应大.4.按反馈形式分有:滑阀位置反馈---利用滑阀的位置反馈的阀,常用的有直接位置反馈,机械位置反馈,位置电反馈,位置力反馈等.直接位置反馈---阀芯位移通过反馈杆与挡板相连,构成滑阀位移力反馈.常用于两级伺服阀.机械位置反馈---将功率级滑阀的位移通过机械机构反馈到前置级.位置电反馈---将功率级滑阀的位移通过位移传感器反馈到伺服阀的放大器输入端,实现功率级滑阀阀芯定位.2.2 力矩马达力矩马达是将电信号转换成机械运动的一种电气-机械转换.一.力矩马达工作原理利用电磁原理,由永久磁铁(或激磁线圈)产生极化磁场,而电信号通过控制线圈产生控制磁场,两个磁场相互作用,产生与控制信号成比例并能反映控制信号的极性的力或力矩,使其运动部分产生直线位移或角位移的机械运动.二.力矩马达分类1. 根据运动形式分1) 角位移马达--力马达,可移动件是直角位移.2) 直线位移马达—力马达,可移动件是直线位移.2.按可动件结构分1)动铁式---可动件是衔铁.2)动圈式---可动件是控制线圈.3.按极化磁场产生的方式分1)永磁式---利用永久磁铁建立极化磁通.2)非极磁式---无专门的极磁线圈,两个控制线圈差动连接,利用常值电流产生极化磁通.3)固定电流极磁式---利用固定电流通过极磁线圈建立极化磁场.三.力矩马达要求1.能产生足够的输出力和行程,且要求体积小,重量轻.2.动态性能好,响应速度快.3.直线性好,死区小,灵敏度高,磁滞小.4.抗震,抗冲击,不受环境温度和压力影响.四.典型力矩马达1. 永磁动铁式力矩马达1)组成下图所示为一种常用的永磁动铁式力矩马达工作原理图,它由永久磁铁(2),上下导磁体(3,5),衔铁(4),弹簧管(1),控制线圈(两个控制线圈套在衔铁上).2)工作原理永久磁铁将上下导磁体磁化,一个为N极, 一个为S极.无信号电流时,即两个控制线圈的电流i1=i2,衔铁在上下导磁体的中间位置,由于力矩马达结构是对称的, 永久磁铁在四个工作气隙中所产生的极化磁通是一样的,使衔铁两端所受的电磁吸力相同,力矩马达无力矩输出.当有信号电流通过控制线圈时,线圈产生控制磁通(其大小和方向取决于信号电流的大小和方向).假设i1>i2,如上图所示,在气隙1,3中控制磁通与极化磁通方向相同,而在气隙2,4中控制磁通与极化磁通方向相反,因此气隙1,3中其控制磁通与永久磁铁磁通合成大于气隙2,4中控制磁通与极化磁通的合成,于是衔铁上产生顺时针方向的电磁力矩,使衔铁绕弹簧管转动中心顺时针方向转动.当弹簧管变形产生的反力矩与电磁力矩相平衡时,衔铁停止转动.如果信号电流反向,则电磁力矩也反向,衔铁向反方向转动.电磁力矩的大小与信号电流的大小成比例,衔铁的转角也与信号电流成比例.因此调节信号电流便可调节电磁力矩的大小,也就调节衔铁的转角大小.2.永磁动圈式马达1)组成永久磁铁,可动线圈,对中弹簧等.2)工作原理图所示为一种常见的结构原理图图中,永久磁铁在工作气隙中形成极化磁通,当控制信号电流加到线圈上时,线圈就会受到电磁力的作用克服弹簧力和负载力而运动.线圈的位移与控制电流成比例.因此输入信号电流就会得到电磁力,且呈正比关系,具有线性特性.3.动铁式力矩马达与动圈式力马达比较动铁式力矩马达动圈式力马达磁滞大磁滞小工作行程小工作行程大输出力矩大,弹簧刚度大,. 输出力矩小,固有频率低.固有频率高同功率体积小, 价格高同功率体积大,价格低五.力矩马达的数学模型(电磁力矩计算)1) 永磁动铁式力矩马达的数学模型(电磁力矩计算)电磁力矩是由于控制线圈输入电流,在衔铁产生了控制磁通而形成的.因此需先求出力矩马达的控制电流.通过力矩马达的磁路分析可求出电磁力矩的计算公式.a.力矩马达的控制电流参看永磁动铁式力矩马达的工作原理图,在其工作时, 两个控制线圈由一个放大器供电,其常值电压Eb在每个控制线圈中产生的常值电流I0大小相等方向相反.当放大器有输入电压时,两个控制线圈的电流分别为:I1= I0+iI2= I0-i式中i1 i2--- 每个控制线圈中的电流;I0---每个控制线圈中的常值电流i---每个控制线圈中的信号电流;两个控制线圈的差动电流为Δi=i1-i2=2I=i c(1)I c ---输入马达的控制电流b. 衔铁中产生的控制磁通根据力矩马达的磁路原理图,应用磁路的基尔霍夫第二定律可得气隙的合成磁通, 继而应用磁路的基尔霍夫第一定律求出衔铁磁通:φa=φ1-φ2=2φgθ(a/Lg)+Δi(Nc/ Rg)式中φa ---衔铁磁通;φg ---衔铁在中位时气隙的极化磁通;θ---衔铁转角; a ---衔铁转动中心到磁极面中心的距离;Lg ---衔铁在中位时每个气隙的长度;Rg ---工作气隙的磁阻;NcΔi---永久磁铁产生的控制磁动势;c. 作用在衔铁上的电磁力矩根据马克斯威尔公式计算衔铁在磁场中所受的电磁吸力,可得由控制磁通和极化磁通相互作用在衔铁上产生的电磁力矩简化式为Td=KtΔi+Kmθ式中Td ---作用在衔铁上的电磁力矩;Kt---力矩马达的中位电磁力矩系数;Km---力矩马达的中位磁弹簧刚度;从式中可看出,在衔铁中产生的控制磁通以及由此产生的电磁力矩比例于差动电流.2) 永磁动圈式力马达的数学模型(电磁力矩计算)参见永磁动圈式力马达的工作原理图,力矩马达的可动线圈悬置于工作气隙中,永久磁铁在工作气隙中形成极化磁通,当控制电流加到线圈上时,线圈就会受到电磁力的作用而运动.其运运动方向和电流方向按左手定则判断.线圈上的电磁力克服弹簧力和负载力,产生一个与控制电流成比例的位移.由于电流方向与磁通方向垂直,根据载流导体在均匀磁场中所受的电磁力公式,可得力马达线圈所受的电磁力:F=BgлDNcic=Ktic式中F---线圈所受的电磁力;K t---电磁力系数F=BgлDNcN c---控制线圈的匝数.B g---工作气隙中的磁感应强度;D---线圈的平均直径;I c---通过线圈的控制电流.结论: 永磁动圈式力马达的电磁力与控制电流成正比,具有线性特性.2.3 液压放大元件电液伺服阀另一个组成部分是液压放大器,它是一种以机械运动来控制流体动力的元件.它将力矩马达(或力马达)输出的机械运动(转角或位移)转换为液压信号(液体的流量和压力)输出,并进行了功率放大.液压放大元件是伺服系统中的一种主要控制元件,其静动态特性对系统的性能影响很大.且结构简单,单位体积输出功率大,工作可靠和动态性能好.一.液压放大元件的种类液压放大元件有滑阀,喷咀挡板阀和射流管阀等.二.滑阀滑阀是靠节流原理工作的.它借助于阀芯与阀套间的相对运动改变节流口面积的大小,对流体流量或压力进行控制.滑阀结构形式多,控制性能好,在电液系统中应用最广泛.1.滑阀的结构及分类(1)按进出阀的通道数划分它与液压方向阀的通道数一样,有四通阀,三通阀和二通阀.四通阀有一个进油口,一个回油口,两个控制口.可用来控制双作用液压缸或马达.如图a所示.三通阀有一个进油口,一个回油口,一个控制口.只可用来控制差动液压缸.如图b所示.图b 三通阀图c 二通阀二通阀一个进油口,只有一个可变节流口,须和一个固定节流孔配合使用,才能用来控制差动液压缸. 如图c所示.(2)按滑阀的工作边数划分a.四边滑阀--与上对应四通阀有四个可控的节流口,又称四边滑阀,控制性能最好.如上图a所示.b. 双边滑阀--三通阀有两个可控的节流口,又称双边滑阀, 控制性能居中. 如上图b所示.c. 单边滑阀--单边滑阀只有一个可控的节流口, 控制性能最差.(3)按滑阀的预开口型式划分按滑阀阀芯在中位时,阀芯凸肩与阀套槽宽的几何尺寸关系划分有:a.正开口--阀芯凸肩与阀套槽宽的几何尺寸是负重叠的(即阀芯凸肩宽度大于阀套槽宽),参见图a.b.零开口--阀芯凸肩与阀套槽宽的几何尺寸是零重叠的(即阀芯凸肩宽度等于阀套槽宽),参见图b.c.负开口--阀芯凸肩与阀套槽宽的几何尺寸是正重叠的(即阀芯凸肩宽度小于阀套槽宽),参见图c.图a 正开口图b 零开口图c 负开口.阀的预开口形式对其性能,特别是零位附近特性影响很大.如下图所示:零开口阀具有线性流量增益特性,性能比较好.负开口阀由于流量增益特性有死区,将引起稳态误差,有时还可能引起游隙,从而产生稳定性问题.正开口在正开口区内外的流量增益变化大,压力灵敏度低,零位泄漏量大.图不同开口形式的流量特性1-零开口2-正开口3-负开口2.滑阀静态特性滑阀静态特性是指稳态情况下,阀的负载流量qL, 负载压力pL和滑阀的位移xv三者之间的关系,即qL=f(pL, xv).它表示滑阀的工作能力和性能,对系统的静动态特性计算有重大意义.阀的静态特性可用方程(压力-流量方程),曲线或特性参数(阀的系数)表示.(1) 滑阀静态特性a.压力-流量方程滑阀的控制流量可由滑阀节流口流量公式表示,其流量是阀芯位移和节流口的压降的函数.为了使问题简化,在推导压力-流量方程时,作了以下假设:a)液压能源是理想的恒压源,供油压力Ps为常数,回油压力P0为零.b)忽略管道和阀腔内的压力损失.c)假定液体是不可压缩的.d)假定阀各节流口流量系数相等.e)阀的窗口都是匹配和对称的.根据节流口流量公式,以四边滑阀为例,可推导出压力-流量方程:负载流量为QL=CdA2√1/ρ(ps - pL)- CdA1√1/ρ(ps + pL)式中Cd-为流量系数,ρ-为油密度, (ρ=870Kg/m3)A1- 为节流口1的面积;A2-为节流口2的面积;ps –为恒压油源压力pL-为负载压力,pL=p1-p2.供油流量为Qs=CdA2√1/ρ(ps - pL)+ CdA1√1/ρ(ps + pL)b.滑阀的静态特性曲线a)流量特性曲线阀的流量特性是指负载压降等于常数时, 负载流量与阀芯位移之间的关系,其图形表示即为流量特性曲线. 负载压降为0时的流量特性称空载流量特性.相应的曲线为空载流量特性曲线,如图a所示.图a 空载流量特性曲线图图b 压力特性曲线b)压力特性曲线阀的压力特性是指负载压降等于常数时, 负载压降与阀芯位移之间的关系,其图形表示即为压力特性曲线.通常所指的压力特性是指负载流量为0时的压力特性,相应的曲线为压力特性曲线,如图b所示.c)压力-流量特性曲线阀的压力-流量特性曲线是指阀芯位移一定时, 负载流量与负载压降之间关系的图形. 如下图所示为理想零开口四边滑阀的压力-流量特性曲线族.它全面描述了阀的稳态特性,并可获得阀的全部性能参数.阀在最大位移下的压力-流量特性曲线可以表示阀的工作能力和规格.当负载所需的压力和流量能被阀在最大位移下的压力-流量特性曲线所包围时,阀就能满足负载的要求阀的压力-流量特性曲线(2)零开口四边滑阀的静态特性a. 理想零开口四边滑阀的静态特性理想零开口滑阀是指径向间隙为零,工作边锐利的滑阀,如图所示.由于径向间隙为零,工作边锐利,因而在讨论静态特性时可不考虑它们的影响.且认为节流阀口为矩形,其面积A=W xv, (W-面积梯度xv-阀芯位移).a)理想零开口四边滑阀的压力-流量方程 理想零开口四边滑阀的压力-流量方程:QL=Cd W xv -(1)b)压力-流量曲线根据无因次压力-流量方程绘制压力-流量曲线如下图所示.因阀窗口是匹配且对称的,所以压力-流量曲线对称于原点.当阀在正常工作状态是按图中Ⅰ,Ⅲ象限曲线.只有在瞬态情况下,才会处于Ⅱ,Ⅳ象限曲线.⎪⎪⎭⎫ ⎝⎛-Lv v s p p χχρ1。
四连杆机构及其设计
4)泛菱形机构
若四杆机构的两相邻杆长度两两相等,则机构将变为泛菱 形机构,如下图a)、b)、c)
C
C
C
B2 3
B2 3
3(2)
1
1
4(1)
A 4D
A4 D
AD
图a)双曲柄机构 图b)曲柄摇杆机构
图c)二杆机构
泛菱形机构有3个周转副,一个摆转副。当其以短杆为机架时为双 曲柄机构;当其以长杆为机架时为曲柄摇杆机构,这种机构当相邻 两杆重叠在一起时,将退化为二杆机构,其运动不确定。
B
自卸卡车举升机构
摆缸式内燃机机构
左侧四杆机构位移量小,减振功能差
挖掘机相邻两杆之间的开合动 作也是由摇块机构来实现的。
③定块机构(移动导杆机构) B
曲柄滑块机构中,当滑块3为
1
2
A
4
C3
机架时,即得定块机构。
曲柄滑块机构
1 2
3 4
定块机构
滑块3为定块,一般取杆1为原动 件,杆2绕C点往复摆动,而杆4 仅相对滑块3作往复移动。
曲柄滑块机构、铰链四杆机构、导杆机构是最常见 的连杆机构型式。
这些机构的共同特点是其原动件1的运动 都要经过一个不直接与机架相联的中间构件 2才能传动从动件3,这个不直接与机架相联 的中间构件称为连杆,而把具有连杆的这些 机构统称为连杆机构。
●构件可长,用于远距离的操作。如挖掘机、车闸。 ●杠杆特性,用于增力。 ●运动形式多样,可用于运动转换。 ●连架杆位置对应,用于控制。 ●连杆位置多变,用于特定运动规律。
B
1
2
A
4
C3
4 1
曲柄滑块机构
2
曲柄摇块机构
3
四杆机构的设计步骤和方法
温馨小提示:本文主要介绍的是关于四杆机构的设计步骤和方法的文章,文章是由本店铺通过查阅资料,经过精心整理撰写而成。
文章的内容不一定符合大家的期望需求,还请各位根据自己的需求进行下载。
本文档下载后可以根据自己的实际情况进行任意改写,从而已达到各位的需求。
愿本篇四杆机构的设计步骤和方法能真实确切的帮助各位。
本店铺将会继续努力、改进、创新,给大家提供更加优质符合大家需求的文档。
感谢支持!(Thank you for downloading and checking it out!)阅读本篇文章之前,本店铺提供大纲预览服务,我们可以先预览文章的大纲部分,快速了解本篇的主体内容,然后根据您的需求进行文档的查看与下载。
四杆机构的设计步骤和方法(大纲)一、四杆机构概述1.1四杆机构简介1.2四杆机构的应用领域二、四杆机构设计步骤2.1确定设计目标2.2分析四杆机构类型2.3确定机构参数2.4选择合适的材料2.5计算运动与动力参数2.6进行仿真分析与优化三、四杆机构设计方法3.1几何法3.1.1尺度法3.1.2位置法3.2解析法3.2.1矩阵法3.2.2微分方程法3.3计算机辅助设计方法3.3.1CAD软件3.3.2仿真软件四、四杆机构设计实例4.1曲柄摇杆机构设计实例4.2双曲柄机构设计实例4.3双摇杆机构设计实例五、四杆机构设计注意事项5.1运动副间隙的考虑5.2刚度与强度的校核5.3疲劳寿命分析5.4安全系数的选择六、四杆机构设计总结与展望6.1设计成果总结6.2存在问题与改进方向6.3未来发展趋势与应用前景一、四杆机构概述以下是对四杆机构设计步骤和方法中的四杆机构概述部分的撰写:1.1 四杆机构简介四杆机构是由四个杆件组成的机械系统,它们通过关节连接在一起。
这四个杆件分别是:曲柄、连杆、摇杆和机架。
四杆机构根据其结构特点和运动特性,可以分为多种类型,如直动四杆机构、摆动四杆机构、转动四杆机构等。
四杆机构在工程应用中具有广泛的应用前景,其设计和研究在机械工程领域具有重要意义。
电液伺服控制器的电路设计及精度研究故障诊断控制器
电液伺服控制器的电路设计及精度研究李永建王少萍摘要:本文针对目前电液伺服控制器中电液伺服阀显示电路影响其驱动电路设计的问题,提出了用电流式模拟表头加继电器方法,代替了采样电路加电压式模拟表头,改善了线性度和精度;针对一般的传感器调理电路增益调节范围小,线性度不好的问题,本文采用了一种新的电路增加了放大倍数和改善了线性度;本文还介绍了一种根据实际情况把电位计和固定电阻结合的方法,提高了电位计在电路中的精度。
关键词:电液伺服阀驱动电路调理电路精度The circuit design of electro-hydraulic servo controller and Accuracy researchAbstract:This paper aimed at issue of electro-hydraulic servo controller servo valve display circuit affecting their driving circuit at present, using Current analog Head and Relay , insteading of sampling circuit and voltage analog Head, improved the linearity and precision;Gain adjustment of the sensor conditioning circuits aimed at the general scope of the small, poor linearity. In this paper, a new amplifier circuit to increase and improve the linearity;It also introduces a method according to the actual situation to put a fixed resistance combination of potentiometer,and it improved the accuracy of circuit.Key words:electro-hydraulic Servo Valve;Driving Circuit;Conditioning circuit;Accuracy近年来电液伺服控制技术的发展非常迅速,覆盖从民用机械到精确打击武器等关键国民经济领域。
作图法设计四连杆机构huzhenpeng

2.4.3 用作图法设计四连杆机构已知条件是支架的最大高度max H 和支架的最低高度min H 。
要求在这范围内掩护梁上铰点上下运动时的轨迹是一条直线或近似直线。
水平偏移量不允许超过75mm 。
在图2.1中,先画基线AB ,由AB 向上取max H ,在m a x H 顶端向下取一定距离(顶梁顶面至掩护梁的铰接轴中线的距离),得到I 点。
由I 点向下取(max H -min H )的长度得到H 点。
以AB 作为底座的底线,在AB 上取一定的长度得B 点,由B 点向上一定距离得J 点,J 点作为后连杆和底座得铰接轴。
由H 作一斜线HC 与水平线成角λ,必须使λ> 15。
在J 点作β角,再取JC 一定长度与HC 交于C 点,C 点作为后连杆与掩护梁得铰接轴。
以J 点为圆心,JC 为半径画一弧ab 。
以I 点为圆心,以HC 的长度为半径画弧与弧ab 交于点E 。
C 点和E 点就是后连杆在支架为最低高度和最大高度时的极限位置 。
在CH 上取一长度CD ,必须CD <CJ 。
D 点作为前连杆与掩护梁的铰接轴。
在IE 上,由E 点取EF ,使CD EF =。
作D 和F 连线的垂直二等分线,在垂直二等分线上取G 点,必须使DG 成为最长杆,又使GJ >DC ,这样CD 就是最短杆。
而且要使DG CD +<JG CJ +。
于是G 点成为前连杆与底座的铰接轴。
IH 之间的轨迹的校核。
在弧CE 内平均取几点,例如1、2、3点,依次地以1、2、3为圆心,以CD 长为半径画弧,与以G 点为圆心GD 为半径的弧交于1′、2′、3′点,连接11′、22′、33′,并都给予延长得1″、2″、3″点,使11″=22″=33″=CH 。
这样,I 3″2″1″H 所形成得曲线要接近直线。
如果差别太大,要改变四连杆的尺寸或角度,以上述的过程画出间的轨迹,使近似于直线。
同时参照液压支架各主要部件尺寸参考表最终确定前连杆长为1207mm ,后连杆长为1126mm 。
四缸电液伺服同步举升实验系统设计
四缸电液伺服同步举升实验系统设计NI Jing;MENG Zhen;WU Shaofeng;WANG Zhiqiang【摘要】设计了一种基于工业PLC的四缸电液伺服同步举升教学实验系统.该系统融合PID控制算法、电液伺服驱动技术、PLC控制技术、磁致伸缩位移传感器技术、现场总线技术和机电传动与控制技术,形成了一套集机电液一体化的多功能进阶型教学实验系统,既可以完成机电传动控制实验、液压传动实验、位移传感器技术实验、PLC控制实验等基础性教学实验,还可以实施现场总线实验、单缸伺服PID控制实验和四缸伺服同步PID控制实验等高科技水平的进阶型教学实验,具有一定的教学实验创新性和先进性,能够有效地满足培养拔尖型大学生创新实践能力的需要.【期刊名称】《实验技术与管理》【年(卷),期】2019(036)001【总页数】6页(P104-109)【关键词】液压传动;四缸同步举升;实验系统;电液伺服驱动;PID控制【作者】NI Jing;MENG Zhen;WU Shaofeng;WANG Zhiqiang【作者单位】;;;【正文语种】中文【中图分类】TH137.9-33培养大学生的创新能力是我国新时代发展的必然要求,在当前创新创业浪潮驱动下,有效提高大学生的整体培养质量,尤其有针对性的提高拔尖大学生的深度创新能力,是保持国家核心竞争力的关键[1]。
对于机械类大学生来说,机电一体化技术在实验教学中起着越来越大的作用,而现有的教学实验平台大多存在综合性不强、实现功能单一、实验关联性以及学生实操性低等缺点,难以实现多样化的教学实验要求[2],更不用说满足拔尖型大学生创新能力的培养需要。
本文面向大学生“深度应用与创新能力”的培养需要,设计了一种基于工业PLC的四缸电液伺服同步举升教学实验系统,融合了液压传动控制[3-8]、PLC自动控制[9-10]、精密传感器[11-12]和机电传动控制[12-14]等方面的知识和技术,能有效地完成机械和自动化等专业的基础性教学实训任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
模 型 预 测 的 方 法 对 系 统 进 行 误 差 补偿 使 用 简 化 了 的 电液 伺 服 作 动 系 统 数 学 模 型 与 该 控 制 方 法 进行 MA T L A B / s i m u l i n k仿 真 。 使 用 此 方 法 大 大 提 高 了起 落 架 加 载 系 统 的 动 态 跟 踪 性 能 。
s e r v o l o a d i n g s y s t e m f o r a i r c r a f t l a n d i n g g e r a s i mu l a t i o n. Ma d e s u r e t h e s p e c i f i c r e a s o n s h o w he t n o n l i n e a r c h ra a c t e r i s t i c o f he t f o u r b a r l i n k a g e a d v e r s e l y a f e c t e d t h e d y n a mi c t r a c k i n g e x p r e s s i o n .F o u n d a c o n t r o l me ho t d wh i c h c o mb i n e n o n l i n e a r ma t h e ma t i c a l mo d e l wi t l l P I D c o n t r o l l e r . Us e d£ b e me £ b o d o f mo d e l p r e d i c t i o n s t o ma k e e l T O r c o mp e n s a t i o n o f t h e s y s t e m b a s e d o n t h e t h o u g h t o f i n v e se r s y s t e m. Ma d e MAT L AB / s i mu l i n k s i mu l a t i o n b y u s i n g s i mp l i f i e d ma he t ma t i c a l mo d e l o f e l e c t r o — h y d r a u l i c s e r v o a c t u a t o r s y s t e m a n d s u c h c o n t r o l me t h o d . Us i n g t h i s me t h o d g r e a t l y i mp r o v e s he t l a n d i n g g e a r l o a d i n g s y s t e m d y n a mi c t r a c k i n g p e r f o r ma n c e . Ke y wo r d s :e l e c t r o - h y d r a u l i c l o a d i n g; n o li n n e r s a y s t e m; MA TL AB / s i mu l i n k; i n v e r s e s y s t e m; p r e d i c t i v e c o n t r o l
关键词 : 电液 伺 服加 载 : 非线性系统 ; MA T L A B / s i mu l i n k ; 逆系统 ; 预 测控 制 中图分类号 : T H1 3 7 文献标识码 : A 文章 编 号 : 1 0 0 8 — 0 8 1 3 ( 2 0 1 4 ) 0 2 — 0 0 0 9 — 0 3
Hy d r a u l i c s P n e u ma t i c s& S e ls a , N O . O 四连杆机构控 制器设计
赵 博 程
( 西 北工 业 大学 自动化 学 院 , 陕西 西 安 7 1 0 0 7 2 )
摘 要 : 该 文 针 对 飞 机 起 落 架 电液 伺 服 加 载 过 程 中非 线 性 传 动 机 构 的动 态 特 性 进 行 分 析 。 确 认 在 动 态 加 载 过程 中 因 四连 杆 机 构 的非 线
Z HA0 Bo - c h e n g
( A u t o ma t i o n C o n t r o l D e p a r t me n t , N o  ̄ h w e s t e r n P o l y t e c h n i c a l U n i v e r s i t y , X i a n 7 1 0 0 7 2 , C h i n a )
Ab s t r a c t :T h i s a r t i c l e a n a l y z e d t h e d y n a mi c c h a r a c t e r i s t i c o n he t n o li n n e a r a c t u a t o r wh i c h u s e d i n l o a d i n g p r o c e s s o f e l e c t r o — h y d r a u l i c
Co n t r o l l e r D e s i g n o f El e c t r o— — h y d r a u l i c S e r v o Lo a d i ng S y s t e m W i t h F o u r Ba r L i nk a g e