第六章——地球重力场模型
地球重力场模型拟合法

地球重力场模型拟合法
地球重力场模型拟合法指通过多项式、球谐函数等数学方法,将地球重力场数据进行拟合,得到地球重力场的模型,从而更好地了解地球的内部结构和性质。
其具体步骤如下:
1. 收集地球重力场数据:从卫星观测、飞机测量、海洋探测等渠道获取地球重力场数据。
2. 数据预处理:对收集到的数据进行去噪、填补缺失值等处理,以得到更准确、完整的数据。
3. 选择模型:选择一种适合的数学模型进行拟合。
常用的模型包括多项式、球谐函数等。
4. 模型拟合:利用选定的模型对处理后的数据进行拟合。
拟合的结果可以反映出地球重力场的特点和分布情况。
5. 模型评估:对所得到的模型进行评估,检查其合理性和可靠性。
6. 应用分析:利用所得到的地球重力场模型,进行地球内部结构和性质的分析和预测,如地球内部密度分布、岩石层界面、地震活动等。
地球重力场模型拟合法是地球物理学领域的重要研究方法,对地球的认识和探索有着重要的意义。
地球重力场

在重力勘探和大地测量学中,一般把大地水准面的形状作为地球 的基本形状。
测量结果表明,大地水准面的形状不规则,它在南北两半球并 不对称,北极略为突出,南极略平,呈“梨”型,见下图。
1、计算正常重力值的基本公式:
g0 ge (1 sin2 1 sin2 2)
式中 g p ge ,
ge
1
(1)重力观测是在地球的自然表面上而不是在大地 水准面上进行的(自然表面与大地水准面间的 物质及测点与大地水准面间的高差会引起重力 的变化)
(2)地壳内物质密度的不均匀分布;
(3)重力日变化
3、重力异常的物理意义
A
大地水准面
σ0
△F
σ V
g0 △g
△F
g观
△σ =σ–σ0 △m=Δσ×V
g观 g0 F
(例如,△m=50万吨的球形矿体,当中心埋深为100米, 可产生355μGal 的异常,当中心埋深为1000米; 则只能 产生3.4μGal的异常,该强度的异常仪器不能观测到。)
(5)干扰场不能太强或具有明显的特征。
第二节 岩矿石密度、重力仪
三大岩类物质循环
三大岩类物质循环
一、岩(矿)石的密度及地球密度分布
(2)成岩过程中的冷凝、结晶分异作用也会造成 同一岩体不同岩相带,由边缘相到中心相, 密度逐渐增大;
C=mr ,方向垂直自转轴向外。
(二)重力场
1、重力场强度
单位质量的物体在重力场中所受的力,称为重力 场强度
P = mg
g=P/m
上式左边为重力场强度,右边为重力加速度
由上式可见:重力场强度,无论在数值上,还是 量纲上都等于重力加速度,而且两者的方向也一致。 在重力勘探中,凡是提到重力都是指重力加速度(或 重力场强度)。
第六章——地球重力场模型
第六章 地球重力场模型随着空间技术的进步和发展,现在不但有可能根据卫星轨道根数的变化精确地确定地球动力形状因子2J ,而且有可能结合卫星测高仪、卫星追踪卫星技术、卫星重力梯度仪等空间技术的测量结果以及地面重力测量结果计算出地球大地位球函数展开的高阶项系数。
以一组数值球函数展开系数表示的地球大地位称为地球重力场模型,地球重力场模型一方面支持卫星轨道的精确计算,另一方面可以给出地面上的长波重力异常场,为研究地球内部结构及其动力学过程提供重要的地面约束条件。
6.1 大地位的球函数展开现将第二章已经讨论过的大地位球函数展开中的有关公式汇总如下。
用r 表示地球外部空间任一点P 的径矢,则根据(2.2.18)式,地球在P 点的大地位球函数展开表示为其中kM 为地球的地心引力常数,a 为地球的赤道半径,θ、λ分别为P 点的地心余纬和经度,(cos )mn P θ为cos θ的n 阶m 次伴随勒让德多项式,(cos )cos mn P m θλ、(cos )sin mn P m θλ为归一化的n 阶m 次球面函数,根据(2.2-1.3)式、(2.2-1.6)式和(2.2-1.8)式,()n P x 、()n P x 、()mn P x 、()mn P x 分别为m n c 、m n s 和mn c 、mn s 分别为大地位球函数展开系数和规一化的大地位球函数展开系数,根据(2.2.20)式,有根据(2.3.4)式、(2.3.5)式,大地位二阶球函数展开系数等于其中A 、B 、C 分别为地球绕1Ox 、2Ox 和其旋转轴3Ox 轴的转动惯量,12I 、23I 、13I 分别为地球绕相应轴的惯性积,大地位球函数展开有时写成下面的形式nm J 、nm K 与大地位球函数展开系数m n c 、m n s 之间的关系为2J 称为地球的动力形状因子。
当3n 时,()n P x 、()mn P x 的表达式如表6.1.1所示。
第二讲 地球重力场

地球重力场地球重力场:在地球内部及其附近存在重力作用的空间。
重力场强度:单位质量的物体在重力场中所受的重力( =G/m )重力加速度g=G/m重力加速度在数值上(包括方向)等于单位质量所受的重力,也就是等于重力场强度。
重力加速度重力重力场强度重力勘探所提的重力都是指重力加速度或重力场强度。
重力(重力加速度)单位在CGS单位制(克、厘米、秒):“cm/s2”,“伽”或“Gal”1 cm/s2 = 1 Gal在SI单位制(千克、米、秒):“m/s2”,“g.u.”1 m/s2 = 106 g.u.重力的变化包括随不同测点位置的空间变化以及同一测点的重力随时间的变化。
空间上:9地球形状、地形:引起约6万g.u. 的变化;9地球自转:重力有3.4万g.u. 的变化;9地下物质密度分布不均匀:能达到几千g.u.变化9人类的历史活动遗迹和建筑物等时间上:9潮汐变化:太阳、月亮等天体引力引起的重力的周期性变化,其大小可达 3 g.u.9非潮汐变化:地球形状的变化和地下物质运动等引起的非周期性变化,其变化大小一般不超过 1 g.u.海水每天有两次涨落运动,其中早晨出现的潮涨称为潮,晚上出现的潮落称为汐,总称潮汐。
地球上海潮涨落主要是由月球还是太阳引起的?月球和太阳对地球的引力不但可以引起地球表面流体的潮汐(如海潮、大气潮),还能引起地球固体部分的周期性形变(固体潮)。
太阳的质量虽比月球的质量大得多,但月球同地球的距离比太阳同地球的距离近,月球的引潮力比太阳的引潮力大。
在日、月引力作用下,地球固体表面也会像海水一样产生周期性的涨落,这就是地球的潮汐现象,称为地球固体潮。
固体潮随时间和空间的变化,除了和地球、太阳、月亮三者之间相对位置的变化有关外,还和地球内部物质的物理性质有关。
因而,利用固体潮资料可以研究地壳内部物质的物理性质和各种物质的分布规律。
它在空间上的变化主要反映地壳和上地幔区域结构的变化。
它在时间上的变化可能与某些灾难性的地震有直接和间接的联系。
重力场基本原理讲解

v0
f r
dm
M
v1
f r
R
M
r
cos dm
v 2
f r
M
(
R r
)2(3 2
cos2
1)dm 2
v 3
f r
M
(R r
)3(5 2
cos3
3 2
cos
)dm
n
V v 0 v 1 v 2 v i i 0
v0
f r
dm
M
f
M r
v 0 就是把地球质量集中到地球质心处时的
点的引力位
——物理大地测量学
➢2、重力场与大地测量的关系
(1)测定地球外部重力场是大地测量的一个任务。 (2)大地测量的主要任务是测定地球表面点位,而点 位使用的大多数观测量需要进行重力改正。
➢2、重力场与大地测量的关系 (3)在大地控制和工程测量中的,使用的高程是相对 于重力场确定的。
(4)为了解地球表面广大区域的多种问题(如卫星定 轨)需要有全球重力场表示。对于大地测量和工程测 量中的大地控制网需要局部重力场表示。
如果令g与l夹角等于π,则有:
dl dW g
水准面之间既不平行,也不相交和相切。
对于某一单位质点而言,作用其上的重力在数值上等于 使它产生的重力加速度的数值,所以重力即采用重力加速度 的量纲,单位是:
伽(Gal=cms-2),
地面点重力近似值 980Gal,赤道重力值 978Gal,两极重力 值 983Gal。由于地球的极曲率及周日运动的原因,重力有从 赤道向两极增大的趋势。
• 建立空间直角坐标系与球面极坐标系
2 r 2 R 2 2Rr cos
r
2[1
地球重力场模型的三维表面显示方法

地球重力场模型的三维表面显示方法易炼【摘要】地球重力场模型是指依据重力场理论导出的计算大地水准面差距、重力异常和垂线偏差等的数学模型,可应用其计算大地水准面差距N的数学模型,运用三维可视化技术表现大地水准面的三维图像.通过实验研究地球重力场模型(EGM96)在我国境内的起伏情况,利用三维显示软件(surfer8.0)显示铁路线路经过的1:5万图幅范围内似大地水准面的起伏情况,为GPS水准布点提供一定的参考.进而在似大地水准面拟合的时候,选择适合的数学拟合函数,以达到较好的拟合效果,进一步提高GPS水准高程拟合精度,为工程测量使用GPS测高技术提供实用的测量设计模型和方法.【期刊名称】《铁道勘察》【年(卷),期】2010(036)003【总页数】3页(P14-16)【关键词】GPS水准;地球重力场模型;高程异常;三维显示【作者】易炼【作者单位】中铁工程设计咨询集团有限公司,北京,100055【正文语种】中文【中图分类】P224.1当前,随着GPS技术的发展和逐步成熟,GPS水准在工程测量领域的应用越来越广泛,在地势起伏不大的平原地区,GPS水准的精度基本上能达到四等水准测量的精度,但在地势起伏较大的山林地区,GPS水准精度与工程测量的精度还存在一定差距。
所以,进一步提高地势起伏较大地区的GPS水准精度,将使GPS水准应用到更为广泛的工程领域。
影响GPS水准精度的主要有两个方面:一是重力场改正的中长波段;二是地形改正的短波段。
通过地球重力场模型的介绍,借助三维显示软件脚本语言编程,将线路所经过图幅范围内的高程异常三维显示出来,为GPS水准布点提供一定的指导,使得布设的GPS水准控制点更加合理,从而更好的拟合似大地水准面,以达到改善GPS水准中长波段测量精度的目的。
1 地球重力场模型地球重力场模型是指依据重力场理论导出的计算大地水准面差距、重力异常和垂线偏差等的一种数学模型。
EGM96模型是综合利用卫星跟踪数据、地面重力数据(主要是高程异常)、卫星测高数据等计算出来的高精度地球重力场模型。
重力场的基本知识可修改全文
在以上假设下,利用实际观测结果,可以 导出一个近似公式,称为参考椭球面(大 地水准面)上正常重力公式,即
g0 () ge (1 sin 2 1sin 2 2)
式中g0(φ)为正常重力值,其随纬度φ变化;
ge ,gp 分别称为赤道处和两极处重力平均
值;β称为地球重力扁度[ (gp – ge) / ge] ;
历史上使用的是C.G.S.制,它是为了纪念第一个 测定重力加速度值的意大利著名物理学家伽利略 (G.Galieo),取1cm/s2作为重力的一个单位,称作 “伽”(Gal)。
实用中是取它的 千分之一即“毫伽”作常 用单位。
近二十年来随着高精度重力测量,特别是 在水文、工程、 环境勘查中微重力测量的
1m/ s2 =106 g.u.
1Gal = 104 g.u.
1mGal= 10 g.u.
目前,最好的重力仪测量精度可达到微伽 级。
4
重力加速度并不是一个恒量,在空间上和 时间上都存在着一定的变化,只是这种变 化相对重力全值(约9.8m/s2)来说太小了, 因而需要专门设计的仪器—重力仪才能可 靠地测量出这些变化来。
从以上讨论可知,地球表面正常重力场的 基本特征是:
(1)正常重力是人们根据需要而提出来的, 不同的计算公式对应不同参数的地球模型, 反映的是理想化条件下地球表面重力变化 的基本规律,所以它不是客观存在的;
(2)正常重力值只与纬度有关,在赤道上最 小,两极处最大,相差约50000g.u.;
(3)正常重力值随纬度变化的变化率,在纬 度45°处达到最大,而在赤道和两极处为
大地水准面与参考椭球面差异不是均匀分 布的,最大的差异可达 117 m,它与地球表 面地形以及地下物质分布有关。
由于大多数地区大地水准面与参考椭球面 差异不大,因此在很多情况下,可将两者 视为相同,这时,天文纬度近似等于地理 纬度。
地球重力场的基本知识
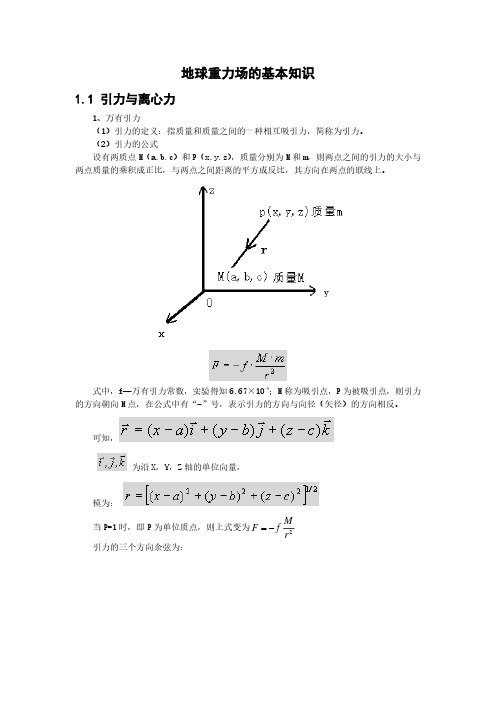
地球重力场的基本知识1.1 引力与离心力1、万有引力(1)引力的定义:指质量和质量之间的一种相互吸引力,简称为引力。
(2)引力的公式设有两质点M (a.b.c )和P (x.y.z ),质量分别为M 和m ,则两点之间的引力的大小与两点质量的乘积成正比,与两点之间距离的平方成反比,其方向在两点的联线上。
式中,f —万有引力常数,实验得知6.67×10-8;M 称为吸引点,P 为被吸引点,则引力的方向朝向M 点,在公式中有“-”号,表示引力的方向与向径(矢径)的方向相反。
可知,为沿X ,Y ,Z 轴的单位向量,模为:当P=1时,即P 为单位质点,则上式变为2M F f r=− 引力的三个方向余弦为:(3)引力的三个坐标轴分量(模乘以方向余弦):2、地球引力(1)假设:地球为圆球,物质按同一密度按同心层分布。
(2M:地球质量m:质点质量r:质点至地心距离(3)方向:指向地心3、地球上一点的离心力(1)定义:离心力是一个惯性力,是地球上一点以等角速度绕地球自转轴而产生的。
(2)公式:P= m ω2ρ,式中: ω—地球自转角速度;ρ—质点所在平行圈半径,随纬度不同而不同: ①在旋转轴上离心力=0;②离旋转轴越远,离心力越大;③在赤道上,离心力达到最大值,约为引力的1/200还小。
(3)方向:指向质点所在平行圈半径的外方向。
4、重力(1)定义:指相对于地球固定的单位质点所受的力。
因地球上的质点同时受到引力和离心力的共同影响。
(2)表达式:P F g+=其中,F :指地球及其它天体质量产生的引力;P :指相对于地球瞬时角速度的离心力,而自转角速度是随时间变化的,地球地极也不是固定不变的,故指相对于地球的平均角速度和平均地极的离心力。
(3)地极:过地球质心的自转轴与地面的交点,称为地极,是随时间变化的。
(4)对实测重力应加改正:(因重力测量是单位质点在测量时刻的真正重力,不是前面定义的重力,故应加改正)包括:①相对于地球运动的天体的影响;②由这些天体影响造成的地球形状变化的影响; ③大气的影响;④地球的自转角速度变化和极移的影响(极移:地极点在地球表面上的位置随时间变化的现象,称为地极移动,简称极移) (5)方向:重力的方向主要取决于地球引力的方向,总是朝向地球内部。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第六章 地球重力场模型随着空间技术的进步和发展,现在不但有可能根据卫星轨道根数的变化精确地确定地球动力形状因子2J ,而且有可能结合卫星测高仪、卫星追踪卫星技术、卫星重力梯度仪等空间技术的测量结果以及地面重力测量结果计算出地球大地位球函数展开的高阶项系数。
以一组数值球函数展开系数表示的地球大地位称为地球重力场模型,地球重力场模型一方面支持卫星轨道的精确计算,另一方面可以给出地面上的长波重力异常场,为研究地球内部结构及其动力学过程提供重要的地面约束条件。
6.1 大地位的球函数展开现将第二章已经讨论过的大地位球函数展开中的有关公式汇总如下。
用r 表示地球外部空间任一点P 的径矢,则根据(2.2.18)式,地球在P 点的大地位球函数展开表示为其中kM 为地球的地心引力常数,a 为地球的赤道半径,θ、λ分别为P 点的地心余纬和经度,(cos )mn P θ为cos θ的n 阶m 次伴随勒让德多项式,(cos )cos mn P m θλ、(cos )sin mn P m θλ为归一化的n 阶m 次球面函数,根据(2.2-1.3)式、(2.2-1.6)式和(2.2-1.8)式,()n P x 、()n P x 、()mn P x 、()mn P x 分别为m n c 、m n s 和mn c 、mn s 分别为大地位球函数展开系数和规一化的大地位球函数展开系数,根据(2.2.20)式,有根据(2.3.4)式、(2.3.5)式,大地位二阶球函数展开系数等于其中A 、B 、C 分别为地球绕1Ox 、2Ox 和其旋转轴3Ox 轴的转动惯量,12I 、23I 、13I 分别为地球绕相应轴的惯性积,大地位球函数展开有时写成下面的形式nm J 、nm K 与大地位球函数展开系数m n c 、m n s 之间的关系为2J 称为地球的动力形状因子。
当3n 时,()n P x 、()mn P x 的表达式如表6.1.1所示。
6.2 卫星的正常轨道卫星在地球的引力场内运动,大地位球函数展开系数中零阶项系数为1,其次为2J,它约为10-3,其他系数mnc、m n s约为10-6或更小,因而卫星的轨道运动主要受大地位球函数展开中的零阶项控制。
大地位球函数展开零阶项控制的卫星轨道称为卫星的正常轨道,大地位球函数展开高阶项系数对卫星的正常轨道产生扰动。
1.卫星的正常轨道运动卫星在大地位零阶项控制下的轨道运动称为卫星的正常轨道。
卫星较地球而言,其质量可以略而不计,卫星在大地位球函数展开零阶项作用下的运动力程为其中r为卫星的径矢,kM为地球的引力常数。
考虑到根据(6.2.1)式,对卫星有得c是常矢量。
(6.2.2)式表明,卫星的轨道位于过地心且与c垂直的平面内。
如图6.2.1所示,在卫星轨道平面内选取平面直角坐标系12Oq q,原点选在地球的质心,r为卫星对地心的径矢,在r、 极坐标系内,卫星的加速度表达式为根据上式和(6.2.1)式,卫星的运动方程为方程(6.2.5)式给出其中h为积分常数。
卫星相对地球质心的径矢r扫过的面积速度为(6.2.7)式表明,卫星相对地球质心的径矢r在单位时间内扫过的面积相等,等于12h。
引入变量u,令则有根据(6.2.6)式,有将其代入上式,得根据(6.2.10)式、(6.2.9)式,有得将(6.2.11)式、(6.2.6)式中的22d rdt、ddt的表达式代入(6.2.4)式,化简得二阶常微分方程(6.2.12)式的解为其中,B为二阶常微分方程(6.2.12)的积分常数。
将卫星的轨道方程(6.2.13)式与椭圆的极坐标方程(6.2-1.4)式进行对比,可以看出卫星的轨道为一椭圆,其中根据(6.2.16)式,可以求出卫星对地心的径矢扫过的面积速度:考虑到椭圆的面积等于22(1)ss a e π-,因而卫星绕地球质心的周期为用s ω表示卫星轨道运动的角频率,根据上式有(6.2.17)式表明,卫星周期运动的角频率平方与其半长轴立方的乘积等于地心引力常数kM 。
(6.2.13)、(6.2.7)、(6.2.17)式表明,在大地位球函数展开零阶项控制下的卫星的正常轨道运动满足行星绕太阳运动的开普勒定律,即(1)卫星的正常轨道为一椭圆,地心位于椭圆的一个焦点上;(2)卫星至地心的径矢在相同的时间内扫过的面积相等,它的面积速度等于21(1)2s s kMa e -; (3)卫星周期运动的角频率的平方与其轨道长半轴立方的乘积等于地心引力常数kM 。
2.卫星的开普勒运动方程卫星轨道的长半轴s a 及其偏心率s e 决定了卫星轨道的几何形状,为了确定卫星S 在任意时间在其轨道上的位置,需要知道它的运动方程。
如图6.2.1所示,O 为地球的质心,'O 为卫星轨道的中心,E 表示卫星S 的偏近点角,它等于''O S 与卫星轨道长半轴'O A 之间的夹角,'S S 垂直于'O A ,'AS B 为中心为'O 、半径为s a 的圆周,''''A S B 为中心为'O 、半径为卫星轨道短半轴b 的圆,根据椭圆的性质,''SS 平行与OA 。
从图6.2.1中可以看出,卫星S 在直角坐标系12Oq q 的两个直角坐标1q 、2q 为其中,ν表示卫星的真近点角,从上式可以得出卫星的偏近点角E 及其真近点角的关系:同时可以求出以偏近点角E 为变量的卫星的轨道方程,它为根据(6.2.18)、(6.2.20)式,有根据卫星的运动方程(6.2.13)式,并顾及到有对比(6.2.21)、(6.2.22)式,得根据(6.2.16)、(6.2.17)式,可以求出卫星绕地球周期运动的角频率s ω表示的h :将上式以及(6.2.20)式代入(6.2.23)式,化简得积分(6.2.24)式,得出以偏近点角E 表示的卫星运动的开普勒方程:此处,0t 为卫星过近地点的时间,M 为平近地点角。
这样,只要给定卫星正常轨道的形状(轨道的长半轴s a 、偏心率s e )和卫星过近地点的时间0t ,则根据(6.2.17)式可求出卫星绕地心周期运动的角频率s ω,然后根据(6.2.19)、(6.2.20)、(6.2.25)式,求出卫星t 时在其正常轨道上的位置,即它至地心的距离r 和真近点角ν。
3.卫星轨道根数s a 、s e 、ν这三个参数只是给定了卫星正常轨道的形状及卫星在其轨道上的位置,为了确定卫星轨道平面在空间的位置,还需要知道卫星轨道平面在地心天球上的定向。
通常给出卫星轨道平面与天赤道的交点的N (卫星轨道的升交点)的赤经Ω、它与天赤道的交角i 以及卫星近地点至N 的角距离ω。
如图6.2.2所示,决定卫星在其轨道上位置的六个参数s a 、s e 、Ω、i 、ω和0t 称为卫星轨道根数,它们分别是:解释6.2-1 椭圆的极坐标方程将直角坐标系12Ox x 的原点置于椭圆的中心,则椭圆的方程为如图6.2-1.1所示,将极坐标系的原点椭圆的焦点上,则有其中,e 为椭圆的偏心率。
根据(6.2-1.2)式,有而根据(6.2-1.1)式,有将上式代入(6.2-1.3)式,化简得将(6.2-1.2)式中的1x 表达式代入上式,化简,得出椭圆的极坐标方程:6.3 地球动力形状因子J对卫星升交点赤经的影响2J最大,约为大地位球函数展开中,零阶项的系数等于1,除零阶项外,二阶项系数210-3,大地位二阶项将使卫星轨道平面在地心天球上的位置发生变化,其升交点沿着天赤道向西后退。
为了简化计算,把卫星轨道视为一个半径为r的圆环,卫星绕地心的圆周运动可以看成角速度为ω、半径为r的缸体圆环绕地心的转动;刚体圆环的线密度μ,旋转角速度分别为其中m为卫星的质量,kM为地球的地心引力常数。
如图6.3.1所示,根据(6.1.10)式,大地位球函数展开的二阶项δ为卫星的赤纬,则二阶项对卫星刚体圆环S处的线元rdμβ相对地球质心产生的力矩元dL等于此力矩元是一矢量,它垂直于过S处的赤经圈并位于赤道平面内,如图6.3.2所示,它在ON、ON方向上的投影分别为'α为S处的赤经。
将(6.3.3)式代入以上两式,并对β积分,得出作用在整个刚体卫星圆ON方向上的力矩,它们分别为环上沿ON、'在图6.3.1中的球面直角三角形SNA中,有又有将(6.3.7)式、(6.3.8)式分别代入(6.3.4)式和(6.3.5)式,得L作用下的运动方程为质量为m、半径为r的刚体卫星圆环在力矩Ne为ON方向的单位矢量,G为卫星圆环的动量矩,即其中Nω为卫星圆环的旋转角速度,e为ω的单位矢量。
因为ω⋅Ω为ON绕天轴的旋转角速度。
将(6.3.13)式代入(6.3.11)式,得考虑到将其代入(6.3.14)式,化简得(6.3.15)式表明,在大地位二阶项产生的力矩作用下,卫星轨道平面升交点N的赤经Ω的J成正比,即N沿天赤道向西运动。
对平均运动速度为负值,其大小与地球动力形状因子2近地面地球卫星而言,地球的赤道半径a与卫星轨道平均半径r的比值等于1,当卫星轨道J约为10-3,卫平面的倾角为45°时,从(6.3.15)式可以看出,考虑到地球动力形状因子2星旋转一圈后,卫星轨道平面升交点的赤经Ω约减小0.4°。
6.4 大地位球函数展开高阶项系数对卫星的影响大地位球函数展开系数只与地球内部的密度分布和地球的形状有关,对全球质心坐标系而言。
归一化大地位的0阶项系数等于1,一阶项系数为地球质心坐标,三个一阶项系数都等0,二阶球带函数系数约等于10-3,其他高阶项系数约为10-6量级或更小。
如(6.1.1)式所示,大地位对卫星的作用,一方面决定于大地位球函数展开系数的大小,另外一方面还与卫星至地心的距离有关,卫星离地心越远高阶项在大地位中所占的比重越小。
大地位的零阶项决定了卫星的正常轨道,根据卫星发射时给定的初始条件,假如不考虑大地位高阶项以及其他因素的影响,描述卫星正常轨道的六个轨道根数将不随时间变化,用r表示正常轨道上的卫星的径矢,则有对给定时间t,根据卫星轨道根数和卫星的开普勒方程(6.2.25)式,可以计算出卫星的径r。
矢r表示卫星的径矢,有用s卫星的运动方程(6.4.2)式的解为其中(1,2,,6)i c i =为卫星轨道根数的修正量,,m mn n c s 为大地位球函数展开系数,(6.5.3)式表明,若知道大地位球函数展开系数,可以根据该式计算出任意时间卫星相对地球的位置,即它的径矢s r 。
用p r 表示地面上的观测点相对地心的径矢,有其中s 为卫星相对地面点的位置,它由卫星至地面点的距离和卫星的赤经和赤纬给出,s 是可观测的物理量。