液压自动抓梁技术条件(1)
液压抓斗技术参数

液压抓斗技术参数引言液压抓斗是一种广泛应用于工程机械中的装置,用于抓取和搬运各种物料。
液压抓斗的技术参数对于其性能和使用效果具有重要影响。
本文将深入探讨液压抓斗的技术参数,包括其结构设计、工作原理、主要参数以及应用范围等方面的内容。
结构设计液压抓斗的结构设计直接关系到其工作效率和可靠性。
液压抓斗通常由抓斗壳体、液压缸、抓斗板和液压系统等部分组成。
抓斗壳体抓斗壳体是液压抓斗的主体部分,承受着物料的压力和冲击力。
抓斗壳体通常采用优质钢材制成,具有足够的强度和刚度。
此外,抓斗壳体还需要考虑物料的流动性和排出性,因此在设计时需要合理的结构形式和内部平整度。
液压缸液压缸是液压抓斗的动力来源,通过液压系统提供的液压能量来驱动抓斗板的运动。
液压缸的设计需要考虑抓斗的额定工作压力和最大工作压力,以及液压系统的流量和压力等参数。
为了确保液压缸的正常工作,还需要注意密封件的选择和安装。
抓斗板抓斗板是液压抓斗用于抓取和搬运物料的部分,通常由优质钢材制成。
抓斗板的设计需要考虑物料的种类和密度,以及液压缸的行程和力量等因素。
合理的抓斗板设计可以提高抓取效果和工作效率。
液压系统液压系统是液压抓斗的重要组成部分,负责提供液压能量和控制抓斗板的运动。
液压系统需要考虑液压泵的流量和压力,以及液压缸的行程和速度等参数。
为了确保液压系统的正常工作,还需要注意过滤器的选择和维护。
液压抓斗的工作原理是利用液压系统提供的液压能量,通过液压缸驱动抓斗板的运动,从而实现物料的抓取和搬运。
液压抓斗的工作过程可以分为以下几个步骤: 1. 液压泵提供压力油液。
2. 液压油液经过过滤器进入液压缸。
3. 液压缸受到液压油液的作用,驱动抓斗板的运动。
4. 抓斗板抓取物料。
5. 液压缸反向运动,将物料搬运到目的地。
6. 液压油液流回液压油箱。
主要参数液压抓斗的主要参数包括额定工作压力、最大工作压力、额定容量、自重和适用的工作环境等。
额定工作压力额定工作压力是指液压抓斗在正常工作状态下所能承受的最大压力。
液压抓木机技术要求

液压抓木机技术要求
1.设计要求
在液压抓木机的设计中,需要考虑以下几个方面的要求:
(1)承载能力:液压抓木机的设计承载能力应满足实际工作需要,确保安全可靠。
(2)结构合理:液压抓木机的结构应布局合理,便于操作和维修,各部件之间的协调性良好。
(3)运动稳定:液压抓木机在运动过程中应具有稳定的姿态,不易产生晃动或翻转。
(4)材料节约:液压抓木机的结构应考虑材料应用合理,尽量减少材料的浪费。
2.材料要求
对于液压抓木机的材料选择,需要满足以下几个要求:
(1)材料强度:液压抓木机主要承受大的负荷,所以选择的材料应具有足够的强度和刚性,能够承受较大的压力和冲击力。
(2)耐磨性:液压抓木机在工作中与木材直接接触,因此材料应具有一定的耐磨性,以保证长期使用不容易磨损。
(3)耐腐蚀性:液压抓木机常常在恶劣的环境中工作,所以材料应具有良好的耐腐蚀性,能够抵御腐蚀和氧化。
(4)可焊性:液压抓木机的制造中常需要进行焊接工艺,因此材料要具备良好的可焊性,以确保焊接质量。
3.工艺要求
(1)工艺可靠:液压抓木机的制造工艺应具有稳定可靠性,确保机器的性能和质量稳定。
(2)测试完善:液压抓木机制造完成后需要进行测试和检验,以确保机器的性能符合设计要求。
(3)表面处理:液压抓木机的表面需要做好处理,常见的方式包括喷漆、镀锌等,以提高机器的美观度和耐用性。
(4)使用寿命:液压抓木机的制造要求应确保其使用寿命较长,质量可靠,减少故障和维修次数。
总之,液压抓木机的技术要求涵盖了设计、材料和工艺等多个方面。
只有满足这些技术要求,才能确保液压抓木机在工作中具有稳定的性能和良好的可靠性。
探究液压自动抓梁的设计

三抓梁改进方法
1液压换向电磁阀故障的处理
按多次抓梁故障处理经验,要降低门机抓梁操作故障率,首先应减少液压换向电磁阀的故障,最好的方式是取消故障率最高的元件环节。例如,可以采用在门机控制室直接控制抓梁电机正反转的方式,操作双向液压泵,实现抓梁的穿、退销。其效果主要是将换向的方式改变,由水下换向电磁阀改变为水上电气元件直接切换,使水下元器件简单化,从而保证水下少出或不出故障。
在抓梁体适当的部位设计出可放置配重块的结构,最好设置在抓梁端部的竖梁结构内,以便调整抓梁在自由启闭状态下的静平衡。配重块尽量放在梁体的底部,以降低抓梁的重心,配重块既要固定牢靠又要可以调整位置。抓梁吊耳板最好设计成上下贯通结构,这样对抓梁结构受力条件好,起吊力主要由两个吊耳板承担,抓梁的其它结构只要满足尺寸要求并且克服自身重量引起的变形即可。
1.2抓梁体
抓梁体一般设计成“工字形”,如果启闭容量较大,可采用箱型梁结构,抓梁体应按在水中浮力最小的结构形式设计,不要做成封闭的箱室结构,以减少抓梁在水中受到的浮力,方便抓梁下落与闸门的定位和对位。抓梁对位装置目前采用的多是套管定位销形式。由于闸定位销布置在门叶上,定位销应成对布置,确保对位准确。
当水下液压抓梁出现故障、无法正常退销时,以往是由潜水员在水下将液压油管拆除,用千斤顶将销轴顶出,将抓梁提出水面检修。但作业门槽狭小空间,有时抓梁根本就没有空间放置千斤顶,或者水下空间狭小,潜水员无法进入处理,因此有效解决水下抓梁突发故障,采用切实可行的应急措施,对于电站闸门正常运行至关重要。为此,经过研究和实验,当抓梁水下故障无法排除时,由潜水员携带快速接头的液压软管,与抓梁上配置的应急快速插头连接,再利用地面备用应急液压泵站控制的方式,实现抓梁穿退销。其次,抓梁就位传感器、位移传感器、水深传感器的配置,要求灵敏度高、防水性能好、机械强度高,能适应水流冲击、高泥沙污物等干扰,并能适应水下40 m深度的工作环境。
【CN210104679U】同步挂钩式液压自动抓梁【专利】

(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920316686.3(22)申请日 2019.03.13(73)专利权人 黄河科技学院地址 450000 河南省郑州市航海中路94号(72)发明人 吴俊峰 (51)Int.Cl.E02B 7/20(2006.01)E02B 15/06(2006.01)(54)实用新型名称同步挂钩式液压自动抓梁(57)摘要本实用新型公开了一种同步挂钩式液压自动抓梁,用于水电站工程中闸门或拦污栅的启闭,包括导向轮装置1、导向支撑装置2、梁体3和液压泵站4,和现有技术不同的是,该同步挂钩式液压自动抓梁还包括分流集流阀5、液压管路6、液压油缸7、脱钩到位传感器8、挂钩9和挂钩到位传感器10,挂脱钩改用液压驱动,并使用分流集流阀控制液压油缸同步和使用传感器到位检测,提高挂脱钩动作可靠性,同时保留了挂钩装置,可以不对现有闸门或拦污栅做任何改动,直接更换抓梁,降低设备改造成本,具有广泛的实用性。
权利要求书1页 说明书2页 附图1页CN 210104679 U 2020.02.21C N 210104679U权 利 要 求 书1/1页CN 210104679 U1.一种同步挂钩式液压自动抓梁,包括导向轮装置(1)、导向支撑装置(2)、梁体(3)和液压泵站(4),其特征在于,还包括分流集流阀(5)、液压管路(6)、液压油缸(7)、脱钩到位传感器(8)、挂钩(9)和挂钩到位传感器(10),所述的液压油缸(7)两端分别与梁体(3)、挂钩(9)铰接,并通过液压管路(6)与液压泵站(4)连接,所述的液压管路(6)中串接分流集流阀(5),所述的挂钩(9)铰接在梁体(3)上,所述的脱钩到位传感器(8)和挂钩到位传感器(10)固定安装在梁体(3)上。
2.根据权利要求1所述的同步挂钩式液压自动抓梁,其特征在于所述的脱钩到位传感器(8)和挂钩到位传感器(10)是电感型防水接近开关。
乌江银盘水电站自动抓梁设计
上 吊点距(mm) 下 吊点距(mm)
自动抓梁 4800 6000
自动抓梁 4800 6460
门 自动抓梁 压 自动抓梁 压 自动抓梁 源自8Oo0 800O
8Oo0
8O00
1200O
120o0
动抓梁 4500 680o
穿轴行程 (一 ) 长 (mm) 高 (mm)
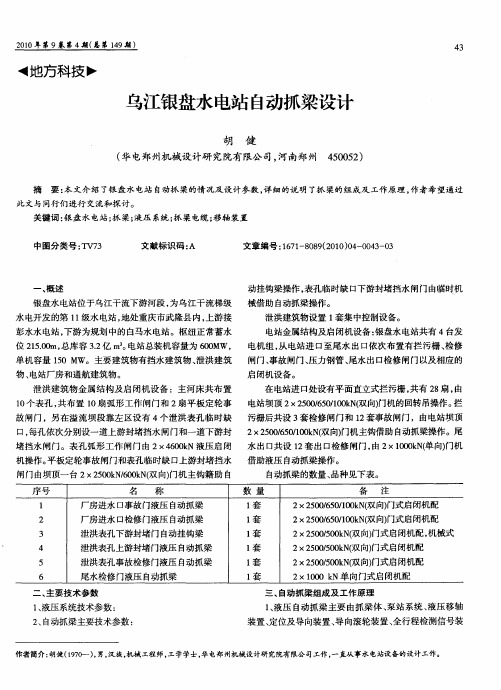
2010耳 第 9卷 第 4期(总第 149期 )
43
地方科技
乌江银盘水电站 自动抓梁设计
胡 健 (华电郑州机械设计研究院有限公 司,河南郑 州 450052)
摘 要 :本 文介绍 了银盘 水电站 自动抓 梁的情 况及设计参数 ,详 细的说 明 了抓 梁 的组成 及工作原理 ,作者希望通过 此 文 与 同行 们 进 行 交 流 和探 讨 。
数 量 1套 1套 1套 1套 1套 1套
备 注 2×2500/650/100kN(g3( ̄)(]式启 闭机 配 2×2500,65o/10okN(双 向)门式 启闭机配 2×25o0,500kNf双 向)门式启 闭机配 ,机械式 2×2500/5o0kN(双向)门式启 闭机配 2×25oo,5ookN(双向)门式启 闭机配 2×1000 kN单 向门式启 闭机配
10个 表孔 ,共 布置 10扇弧形 工作闸 门和 2扇平板定 轮事 电站坝顶 2×250o/650/1ookN(双 向)门机的回转 吊操作 。拦
故 闸门 ,另在溢 流坝 段靠左 区设 有 4个 泄洪表 孔临 时缺 污栅后共 设 3套 检修闸 门和 12套事故 闸门 ,由电站 坝顶
口,每孑L依次分别设一道上游 封堵挡 水闸 门和一道下 游封 2×250o/650,1o0kN(双 向)门机 主钩借助 自动抓梁操作 。尾
自动抓梁简介--

产品简介1.名称:磁控全自动抓梁2. 应用的领域范围:属于机械起重与水利闸门的启闭机械3.目前市场状况:目前在水利闸门行业或起重行业,采用的自动抓梁,普遍存在的弊病:液压自动抓梁结构复杂、成本高、操作繁琐,动作缓慢,但因穿销式的优点在于保险系数高,所以中大型的起重行业及水利行业仍在大量使用,然而摆锤式、吊环锁销式、机械式等又存在结构上虽简单些,但可靠性能差,保险系数低,中、大型起重作业不好采用等缺点,因此在此情况下,我设计了一种高保险系数的穿销式磁控自动抓梁,其特点是:可靠性高,等同于液压式的级别,其结构很简单、成本很低的造价(基本就是一根梁体的价格)、加工工艺很简单,不需特殊设备加工,使用便捷,操作简单,动作速度快(穿或脱拔销子时间小于0.5秒)等优点,可以取代目前市场的90%以上的其他形式的自动抓梁。
所以有广阔的市场前景。
4.结构图与工作原理4-1磁控自动抓梁的主要结构:4-1-1.梁体:同普通抓梁梁体相同.不同处在于梁体下端多了两个支脚。
4-1-2.导向滑块或滑轮:同普通抓梁相同。
4-1-3.上吊钩或吊具:同普通抓梁相同。
4-1-4.下吊钩:普通液压抓梁下吊钩(或吊具)为固定式,而磁控自动抓梁的下吊具为上下可活动(活动范围一般在150-200mm即可)。
与被起重物带锥度的吊耳,可自动精确定位,这样控制穿脱销的磁控头便可取代了液压油缸。
4-2 磁控自动抓梁的工作原理4-2-1.工作原理活动的梁下吊具在随梁体下落时,提前150-200mm 下落到位于闸门(或被起重物)的吊耳(或起吊点)处(因为该吊具是活动的结构,所以可以自行自动精确定位),随梁体的继续下落,梁体下面的支脚,触压磁控头的控制杠杆,因此磁控头翻转180度,产生穿销动作,因磁力的作用,一旦穿销,便不会自行脱落。
这一过程,完成了穿销动作。
随后可以起吊。
当将闸门(或重物)放置后,随着梁体的下落,下吊具优于先梁体150-200mm落定,梁体的继续下落,梁体下的支脚下压磁控头的杠杆,迫使磁控头翻转再180度,磁控头带动销子将其拔出来,梁体落定后就完成了脱销动作。
电动液压抓斗技术要求

新建钢渣热闷处理项目电动液压抓斗技术协议甲方:乙方:XXXX有限责任公司(以下简称甲方)与洛阳起重机厂有限公司(以下简称乙方)就甲方新建钢渣热闷处理项目电动液压抓斗及配套电气设备等事宜,经双方友好协商达成如下技术协议:一、总则本技术要求适用于抚顺新钢铁有限责任公司新建钢渣热闷处理项目电动液压抓斗及配套电气设备,它包括本体及辅助设备的功能设计、制造和安装、检验等方面的技术要求.二、电动液压抓斗技术参数及要求2.1抓斗瓣数:6瓣2。
2抓斗容积:3.2立方(筛面到吊钩最高限位距离4米)2.3作业环境:电动液压抓斗应能在有粉尘、处在腐蚀性气体的环境中工作2。
4抓取物料:钢渣2。
5钢渣容重:2吨/立方2.6钢渣粒度比例:大于150mm占10%;40~150 mm占30%;小于40mm占60%2。
7抓斗的抓满率: 大于95%2。
8操作方式:驾驶室操作2。
9抓斗总体尺寸2。
9。
1闭合高度:约3000mm2.9。
2打开高度:约2400mm2。
9.3闭合宽度:约2400mm2.9.4打开宽度:约4100mm2。
10电动液压驱动系统2.10.1电压:380V,50HZ2。
10.2电机输出功率:S1工作制30kw:40% ED37 kw(符合VED 0530,120次启动/小时。
2.10.3保护系统:IP552。
10。
4绝缘等级:F2.10。
5闭合时间:13。
8s2。
10。
6打开时间:8。
5 s2。
10.7工作压力:210bar三、电动液压抓斗配件要求及供货范围3。
1六瓣抓斗:1套(Q345B)3.2液压缸:6只(密封件采用Dichtomatik或SKF)3.3高压双向液压泵:1套(采用Parker原装)3.4S1工作制30kw电机:1台(采用ABB或siemens)3.5控制块:1个(采用Parke或Eaton-Vickers)3。
6高压胶管、接头等液压元件(采用Eaton或Eaton)3.7抓斗悬挂装置:1套四、电动液压抓斗设计要求4。
抓梁制造工艺简介

右岸进水口2500kN/500kN双向门机主要制作工艺简介1、液压自动抓梁主要由抓梁体、液压穿销装置、侧轮导向装置、电缆插头组、液压泵站及其管路等组成。
2、制造和验收主要依据:合同技术条款、《水利水电工程启闭机制造安装及验收规范(DL/T5019-1994)》。
3、工艺流程框图如下:4、主要工艺措施说明:设备制造所用的金属材料,必须符合设计图样规定,其机械性能和化学成分及其它技术性能必须符合现行的有关国家标准和部颁标准,并应具有出厂合格证。
钢板的对接焊通常采用埋弧自动焊,接头外避开构件应力集中断面,不允许有十字焊缝出现,两平行焊缝的间距应大于500mm。
在构件组装状态下,任何两平行焊缝之间距离不小于3倍板厚且不小于100mm。
所有钢板拼接焊缝均按一类焊缝要求并按有关规定进行超声波探伤检查。
下料时合理考虑加放工艺余量,主要有气割余量、刨边余量、焊接收缩量、加工余量等,其要求均在工艺文件中作有明确规定。
所有下料件注明标识经专职检验确认后方可开据转移单据,转入下道工序。
为减少抓梁体整体焊接变形,尽量分成单独的梁体组装焊接并予校形,最后拼成抓梁体。
由于此时各梁已有较大刚度,且连接焊缝较少,整体变形就会减少。
各梁体和单个构件制造严格按已编制的工艺流程和焊接工艺进行,要充分考虑到焊接收缩量和机械加工部位的切削余量。
制作过程中随时进行检测,严格控制焊接变形和焊缝质量,每道工序除有自检、互检外,还有专职检验人员把关,单个构件制造的允许公差或偏差符合DL/T5019规范中表5.1.1.2中表2的规定。
对单个构件制造的梁体,均在结构车间专用的工装胎具上进行拼装和焊接,车间内主要起重设备有100t、70t、50t、30t、20t行车。
拼焊后的单个构件必须采用火焰或机械矫正,以消除焊接变形。
矫正处理并检测合格后方可转入下道工序。
5、主要零件工艺流程:5.1、抓梁体:结构件拼焊→配连接孔→整体机加工→组装。
5.2、液压自动抓梁上各支座在组装时配焊于抓梁体上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
液压自动抓梁技术条件
1、用途:该液压自动抓梁使用于贵州习水金阳水电站尾水检修闸门移动式启闭机上,用以通过移动式启闭机启闭检修闸门。
并在水下自动实现穿销、脱销。
2、安装地点:贵州习水金阳水电站尾水检修门移动式启闭机的吊头上。
底坎高程为333.051,启闭平台高程,364.80,最低气温为-10℃,空气湿度为
3、工作原理:通过移动式启闭机上的吊头与抓梁的二个起重上吊耳连接,抓梁的下吊耳与尾水检修门的吊耳连接,启闭机的上升或下降来带动液压自动抓梁的上升或下降,从而实现闸门的升降。
自动抓梁的结构件由横梁、上下吊耳、侧导向装置、正反相块组成。
液压系统由泵站、油管路、液压移轴装置及阀组构成。
控制系统由电气柜、水密封接线盒、控制电揽、下降感应器及下降就位导杆、穿销感应器及穿销导杆、脱销感应器及脱销导杆等组成。
液压系统和感应系统、水密封接线盒等均安装在横梁上,工作时随闸门一起潜水并在水下工作。
4、液压自动抓梁主要技术特性:
(1)、吊点中心距:6040mm;
(2)、吊头轴直径:φ90mm;
(3)、吊头内尺寸:207 mm;
(4)、横梁承重量:2×250KN;
(5)、孔口净宽:8550 mm;
(6)、门槽厚度1000 mm;
(7)、止水方式:P型水封,上游止水;
(8)、主轨止水面为不锈钢,厚度为4 mm;
(9)、支承度:9.06米;
(10)、设计水头:28.699 米;
(11)、穿、脱销行程:300mm;
(12)、穿、脱销拉力和推力均为水平力:≥5KN;
(13)、水密封系统耐压深度:50米;
5、液压自动抓梁耐水压密封系统的型号:
ZNSY-2-0510150506/Q
代号含义:
ZNSY------液压自动抓梁耐水压密封系统。
2------------闸门吊点数量为双吊点。
05----------接线盒至液压泵站的电缆的长度为5米。
10----------接线盒至下降到位左吊点感应器电缆的长度为10米。
15----------接线盒至移轴感应器左吊点电缆的长度为15米。
05---------接线盒至下降到位右吊点感应器电缆的长度为5米(第七、八位数字)。
06---------接线盒至移轴感应器感应器右吊点电缆的长度为6米。
6、耐水压闸门综合自动监控系统主要技术指标:
6.1、下降就位精密同步位移传感器:量程为100mm、分辨率为1mm、系统综合误差为1%。
6.2穿销、脱销精密同步位移传感器:0~500 mm、分辨率为1mm、系统综合误差为1%。
6.3、载荷显示:分辨率为100Kg、系统综合误差为<±5%。
6.4、闸门高度显示:分辨率为10mm、系统综合误差为<1%。
6.5、系统耐水压:20个大气压。
7、液压自动抓梁的制造应满足《水利水电工程启闭机制造、安装
及验收规范》DL/T5019-94的要求:
7.1、液压自动抓梁吊点中心距与定位中心距的偏差<±2 mm;
7.2、液压自动抓梁的转动轴和销轴表面应镀铬,转动应灵活;
7.3、机械式自动抓梁的卡体以挂体脱销段之间必须保证一定的间
隙;
7.4、液压自动抓梁的液压装置和信号装置应密封防水,供电插座
严禁漏水;
7.5、自动抓梁出厂前应作静平衡试。
8、液压自动抓梁的防腐要求:
8.1、结构件打砂除锈后其构件的表面达到Sa2.5级;然后涂刷氯化橡胶底漆一次、最后涂刷橡化橡胶面漆二次;
8.2、液压站泵、液压移轴装置及阀组等的防腐要求同8.1;
8.3液压站泵壳、液压油管及接头均采用不锈钢;
特此技术条件!
重庆市水利电力机械厂
2011年1月29日。