IAI控制器说明书
IAI控制器说明书

1.前言打招呼由我和我為你服務多謝您購買本公司產品。
SA系列產品使用容易.體積小,可以自在控制傳動裝置與週邊設備。
除此之外,使用SEL語言還可實現簡單的高度控制夢想。
請仔細詳讀『操作說明書』。
2.安全上的應注意事項請詳讀下列內容,充分留意安全對策。
本產品以自動化機械等的驅動零組件開發而成,因此在自動化機器驅動源的轉矩或速度方面,有請勿超乎標準以外的限制。
為了防止發生事故,請嚴守下列事項。
並請務必參照「安全規則」。
1.本書沒有記載的操作方法,原則上請以「不可操作」解釋。
對於本書內容如有不明之處,請與本公司聯絡。
2.傳動裝置與控制器之間的配線,請務必使用指定之正品。
3.當機械在運動狀態,或者可運動狀態(打開控制器電源狀態)時,請勿站立在機械的運動範圍。
另外也請在周圍設置柵欄,以防止外人接近機械。
4.執行機械之安裝調整作業,或者維修檢查作業時,請務必關閉控制器電源。
並請將「作業中」銘板放置在明顯的場所。
另外,請勿纏繞電線,也避免插入來路不明的電源插座裡。
5.當複數人同時作業時,必須採取一個對應方法,以確認彼此安全作業。
特別是不論開.關電源,或驅動.手動馬達等移動軸的作業,都必須發出聲音確定安全後再進行作業。
6.當使用者(客戶)需要延長配線時,因錯誤配線有可能會導致錯誤動作,因此請充分檢查配線後,並確認正確配線方式後再打開電源。
附錄「安全規則」關於產業用自動裝置安全的JIS規格----「產業用自動裝置之安全通則」(JIS B8433)於1983年3月1日制定,另外由勞動省於同年7月1日修改一部分的「勞動安全衛生規則」,以實施產業用自動裝置之定義或,安全對策等規則。
在此所介紹的是,參考「勞動安全衛生規則」之產業用自動裝置安全對策上的重要規則。
●特別教育(第36條第31號,第32號)第36條第31號操縱裝置及記憶裝置(包含可變序列控制裝置及固定序列控制裝置。
),以記憶裝置資訊為基礎之操縱裝置之伸縮.屈伸.上下移動.左右移動,或者旋轉動作或複合動作等,均可自動執行之機械(除了研究開發中之其他勞動大臣所制定之裝置以外。
IAI样机操作手册

IAI 样 机 操 作 手 册南京三迪自动化设备有限公司 2013年11月25日1、样机准备:电缸、电缆、控制器、电源、通信线、装软件的电脑或者手编器,I/O电缆看情况而定2、演示前接线联机电源和控制器端子的连接马达电缆连接到控制器通信线缆连接到控制器和电脑控制器开关拨到MANU(带刹车的注意刹车的解除)3、确认接线正常后,开启电源首次使用的电缸,首先要找到端口,选择正确的端口才能连接(端口号在 计算机‐属性‐设备管理器里面)如果在客户电脑上用,第一次安装软件的时候,可能找不到端口,要注意安装驱动确认好端口号,按确定键后就可以进行连接:这样就显示连接上,然后会跳出以下页面示教模式1的最高速度是100mm/s, 示教模式2可以按照电缸参数标定的速度动作如果是脉冲型控制器,第一次用时会显示如下功能表:在这个页面下,先按伺服键,再按原点键,电缸的初始动作完成;可以按前进和后退键来进行电缸的动作。
JOG时候的速度可以进行调整。
当前位置是表示电缸的滑块所处的位置,在前进和后退的时候数值是实时变化的! (下表是操作后的页面情况)因为脉冲型控制器还有点位型的功能,可以通过25号参数来设置,数值从0‐5的定义如下表:打开参数‐编辑25号参数的初始值是6,可以改成0‐5(PIO模式见前表)每个脉冲值的设定:25号参数初值是6的时候是脉冲模式,可以根据你自己的需要来设定每个脉冲的距离(单位移动量):电子齿轮分子、分母分别是65、66号参数,编码器脉冲数是800,滚珠丝杠的导程根据电缸而定。
这一步在电脑里无法演示,客户用PLC来控制做的时候要能给客户介绍设定方法!25号参数设置成0(保存参数、重启控制器后),显示页面如下:伺服和原点按键确认后电缸完成原点动作,根据需要的数值输入到位置表格:保存数据后,按连续移动键,电缸就可以循环动作。
左边的键是单步动作键,右边是暂停键。
该位置数据表里的速度、加减速度是可以设定的,区域位置也可以设定,还有调压模式和增量模式等功能(参看控制器的操作手册) 点位型控制器有三种位置输入法:1、直接把位置数值写入位置数据表2、用JOG功能把滑块动作到相应的位置,然后按下位置写入键3、把伺服键OFF,拨动滑块,可以把当前位置写入位置数据表里的数值对应的是I/O线上的一个个端口,I/O线的端口功能如下:(详细功能需要参看PCON说明书)。
IAI电缸 XSEL 控制器

425 XSEL
系统构成
J˄ᄆᄲ˅/K˄ቂ˅/KE˄CE ᄲ˅
ɖ ૰ஏਾܿดވ፺
ࡴཨࡴੴޡᄲ Ꮃᄲ ߷ٽᄲ ႇࢆࣙٽ ࢆࣙـޭݢ ࡴࡪᄹ൝ࢆࣙܕ Ⴟ٣൝ܕᄲ ᅢᎡ፺ ݢ
ISPA Ⴜள ISA Ⴜள ISDA Ⴜள ISDACR Ⴜள ISDACR ESD IF Ⴜள FS Ⴜள RS Ⴜள RCS2 Ⴜள
电源
单相 AC100V / 单相 AC200V
单相 AC200V / 三相AC200V
安全等级
B
B
安全等级 4
安全规格
–
–
CE
CE、ANSI
标准价格
(※1)垂直动作时,单轴的最大输出被限制在 600W 以下。
请咨询
型号
【XSEL-J/K 型】
XSEL
Ⴜள
ᄲ
ஏਾ፺༮
J ᄆᄲ K ቂᄲ
1 1 ፺ࣙࢆ 2 2 ፺ࣙࢆ 3 3 ፺ࣙࢆ 4 4 ፺ࣙࢆ
əE˄ၝቂ˅ ȁମዴ I/O ቂȃ N1 ༕ 320 ༕ ڵ16 (NPN) N3 ༕ 480 ༕ ڵ48 (NPN) P1 ༕ 320 ༕ ڵ16 (PNP) P3 ༕ 480 ༕ ڵ48 (PNP) DV DeviceNet ஏਾ֊ CC CC-Link PR ProfiBus ET Ethernet
SCON
PSEL
ASEL
SSEL
XSEL
XSEL 控制器
I/O 配线图
■输入部分 外部输入规格(NPN 规格)
项目 输入电压 输入电流 ON/OFF 电压 绝缘方式 外部连接设备
RS232C/RS422/RS485 ޭሥ
iai手持编程器rcme

6.3 各部分说明LCD最大为横向 16 字符/行、纵向2行的液晶显示。
可显示各类设定值的编辑及示教内容等。
② EMERGENCY STOP(急停按钮开关)本开关是按锁旋转复位的蘑菇形开关。
本开关与控制器的急停信号线串联,按下后将进入急停状态,并切断电机的供电。
(本开关为“常闭触点:b触点”)(*关于急停信号线及其状态,请另行参阅“控制器使用说明书”。
)解除急停状态时,将本开关的操作部位沿箭头方向转动。
注意 : 使用链路电缆连接多个轴的控制器时,EMERGENCY STOP仅对连接示教器的控 制器所在轴生效。
: 在 RCP2-CG(外接断路继电器型)、ERC、ERC2系列中,EMERGENCYSTOP 仅在外部设有急停回路时生效。
请务必仔细阅读控制器的使用说明书。
返回主画面显示简易示教器的操作中包括多层嵌套,通过本按键可以返回上一层(主画面)。
简易示教器处理结束及重新连接长按约 2.5 秒以上,切换至“开始/结束”画面,可以结束简易示教器的处理并重新进行轴连接。
使用数字键输入数值时,中途取消清除错误、警报发生错误时,会在显示画面的最下方显示错误提示信息,按本键可解除错误并清除提示信息。
用于选择模式、数据内容及更改位置No.。
定位列表的项目:在定位宽度等可以输入减号的区域中,初次按下此键则输入“-”(减号),在其他情况下则输入“.”(小数点)。
用于输入数值。
用于确定数据输入及模式选择。
7. 连接/断开控制器7.1 连接简易示教器①将简易示教器的电缆连接至控制器正面的主通信端口连接器上。
对于有 PORT 开关的控制器,务必将控制器的 PORT 开关拨至“OFF”一侧再进行连接。
关于主通信端口连接器和 PORT 开关的位置,请参阅使用的控制器使用说明书。
②下一步,请将有 PORT 开关的控制器的 PORT 开关拨至“ON”一侧。
7.2 断开简易示教器接下来,对于有 PORT 开关的控制器,应将控制器正面的 PORT 开关拨至 OFF 一侧,然后拔出简易示教器的连接器。
IAI电缸控制器PCON-CA的PROFIBUS通讯笔记

以下来自MJ0258手册,对PCON-CA的PROFIBUS-DP通讯的操作说明:Operation Modes and FunctionsPCON-CA/CFA controllers supporting PROFIBUS-DP can be operated in a desired operation mode selected from the following five modes.Operation Modes and Key Functions[3] Half direct mode: In this mode, the actuator is operated by specifying the speed,acceleration/deceleration and push current, in addition to the target position, directly as values. Number of occupied bytes: 16 bytes (8 words)[4] Full direct mode: In this mode, the actuator is operated by specifying all values relating to position control(target position, speed, acceleration/deceleration, etc.) directly as values.Number of occupied bytes: 32 bytes (16 words)4.3 PROFIBUS-DP (Slave Station) Settings(1) Name of each partThe name of each part relating to PROFIBUS-DP is shown.(4) Operation mode selection (setting) 第95页Set a desired operation mode using a parameter.Set the mode selector switch on the front side of the controller to the MANU position, and then set parameter No.84, “FMOD: Fieldbus operation mode” using the RC PC software (V6.00.05.00 or later). (Refer to 4.7,“PROFIBUS-DP.”)Note Refer to operation manual of RC PC Software for the applicable version.(5) Node address setting (Refer to 4.7)Set the node address using a parameter.Set parameter No. 85, “NADR: Fieldbus node address” using the RC PC software.(Refer to 4.7, “PROFIBUS-DP Parameters.”) Settable range: 0 to 125 (The parameter has been set to 1 at the factory.)(Note 1) Pay attention to duplicate node address settings.(Note 2) PROFIBUS-DP node addresses are set with the master station always having address 0. Accordingly,addresses of slave stations can be set between 1 and 125.(6) Status LED indicationsThe board operating condition and network condition can be checked using the two LEDs provided on the front side of the controller.(Note 1) After the necessary parameters have been set, reconnect the controller power and return the mode selector switch on the front side of the controller to the AUTO position. If the switch remains in the MANU position, PLC operation cannot be performed.(Note 2) 有关波特率的设置The baud rate is automatically set according to the corresponding setting on the master side and thus need not be set.The address assignments under each operation mode are shown below.PLC output →PCON-CA/CFA input (* n indicates the initial output address for each axis.)(Note) The “occupied area” is occupied according to the operation mode setting.This area cannot be used for any other purpose. Also pay attention to use of duplicate addresses.PCON-CA/CFA output →PLC input (* n indicates the initial input address for each axis.)(Note) The “occupied area” is occupied according to the operation mode setting.This area cannot be used for any other purpose. Also pay attention to use of duplicate addresses.4.4.4 Half Direct Mode (Number of Occupied Bytes: 16)第109页In this mode, the actuator is operated by specifying the target position, positioning band, speed, acceleration/deceleration and push current directly as values from the PLC.Set each value in an applicable I/O address. If the zone function is used, set parameter Nos. 1, 2, 23 and/or 24.The key functions that are available on ROBO Cylinders controllable in this mode are shown in the tablebelow.(1) PLC address configuration (* n indicates the initial input/output address for each axis.)第109页(Note) Pay attention to use of duplicate addresses.(2) I/O signal assignments for each axis第110页An I/O signal of each axis consists of 8 words (16 bytes) of I/O addresses.①Control signals and status signals are bit ON/OFF signals.②The target position and current position are both a 2-word (32-bit) binary data. Although values from -999999 to +999999 (unit: 0.01 mm) can be handled by the PLC, set position data within the software stroke range (0 up to the effective stroke length) of the applicable actuator.③Set a desired positioning band. The positioning band is a 2-word (32-bit) binary data and values from 1 to +999999 (unit: 0.01 mm) can be handled by the PLC.④The speed is a 1-word (16-bit) binary data. Although values from 0 to +65535 (unit: 1.0 mm/sec or 0.1mm/sec)can be handled by the PLC, set a value not exceeding the maximum speed of the applicable actuator.The setting of unit can be established in Parameter No. 159 FB Half Direct Mode Speed Unit.⑤The acceleration/deceleration is a 1-word (16-bit) binary data. For the acceleration/deceleration, the PLC can handle values from 1 to 300 (unit: 0.01 G). Take note, however, that the set value should not exceed the maximum acceleration or maximum deceleration supported by the applicable actuator.⑥The push-motion current-limiting value is a 1-word (16-bit) binary data. For the push-motion current-limiting value, the PLC can handle values from 0 (0%) to 255 (100%). Take note, however, that the setting should be inside the allowable specification range of push-motion current-limiting values supported by the applicable actuator (refer to the catalog or operation manual for the actuator).⑦The command current is a 2-word (32-bit) binary data (unit: 1 mA).⑧The current position is a 2-word (32-bit) binary data (unit: 0.01 mm/sec).Positive value: The actuator is moving in the direction opposite home. / Negative value: The actuator is moving in the direction of home.这个解释应该有问题,单位是有问题的,也有可能解释的是速度。
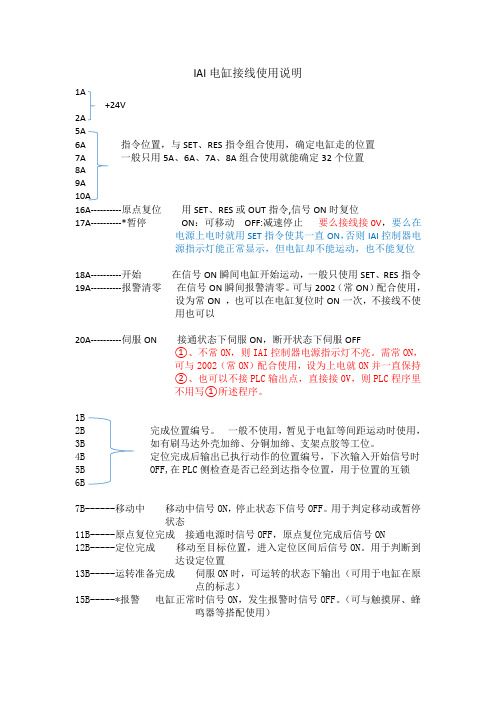
IAI电缸接线说明
2A
5A
6A
指令位置,与 SET、RES 指令组合使用,确定电缸走的位置
7A
一般只用 5A、6A、7A、8A 组合使用就能确定 32 个位置
8A
9A
10A
16A----------原点复位 用 SET、RES 或 OUT 指令,信号 ON 时复位
17A----------*暂停
鸣器等搭配使用)
ON:可移动 OFF:减速停止 要么接线接 0V,要么在
电源上电时就用 SET 指令使其一直 ON,否则 IAI 控制器电
源指示灯能正常显示,但电缸却不能运动,也不能复位
18A----------开始 19A----------报警清零
在信号 ON 瞬间电缸开始运动,一般只使用 SET、RES 指令 在信号 ON 瞬间报警清零。可与 2002(常 ON)配合使用, 设为常 ON ,也可以在电缸复位时 ON 一次,不接线不使 用也可以
完成位置编号。 一般不使用,暂见于电缸等间距运动时使用,
3B
如有刷马达外壳加缔、分铜加缔、支架点胶等工位。
4B
定位完成后输出已执行动作的位置编号,下次输入开始信号时
5B
OFF,在 PLC 侧检查是否已经到达指令位置,用于位置的互锁
6B
7B------移动中 移动中信号 ON,停止状态下信号 OFF。用于判定移动或暂停 状态
20A----------伺服 ON
接通状态下伺服 ON,断开状态下伺服 OFF ①、不常 ON,则 IAI 控制器电源指示灯不亮。需常 ON, 可与 2002(常 ON)配合使用,设为上电就 ON 并一直保持
②、也可以不接 PLC 输出点,直接接 0V,则 PLC 程序里 不用写①所述程序。
X-SEL 双轴IAI说明书
为保证安全在微动之前,请先确定XY轴在可移动的位置!!并将速度设定在30左右。
③双轴微动OK后,可以进行确定原点,基准点的操作。最好将基准点先确定好,这样会大量减少因移动胶头位置导致的胶线更改。
④加速度减速度正常情况下不需要更改
9:保存位置点。
如图所示,将所要保存的点依次保存下来
:保存所选轴的位置
解决方案:按住错误复位按钮5秒左右,重启IAI控制器即可
PS:要确定在下载IAI配置文件时,已经支持外部复位命令。如图所示
此位置应为1
3:IAI手动连线模式下显示的位置与实际目测的位置相差很大。
例如X轴方向是一根600MM的轴,走了一半,控制器就报警提示已经走到极限位置。
此时应先检查IO配置文件如图所示。
10:程序编辑
①界面介绍
B:调试程序(貌似是不执行此段程序)
E:扩张条件→与或
N:扩张条件→非
Cnd:输入条件
Cmnd:命令,宣言
Operand1:操作1
Operand2:操作2
Pst:输出部.有些特殊命令能用到
Comment:注释
PS:详细介绍请参阅X-SEL-中文.pdf第85页。
②如图所示,主程序1
此界面是XY双轴界面
1、2选择框是选择轴,如果想微动12轴,选上即可。
SV:私服电机上电
:选中的单轴JOG-
:选中单轴JOG+
:显示窗内显示出XY轴当前位置值。
Vel:微动速度
Acc:加速度
Dcl:减速度
:下载程序
:保存所选轴的位置
:双轴一起微动
:单步运行(程序或点位置)
:连续运行(程序或点位置)
:动作停止
IAI教导器篇

(TEACHING BOX)目次1.前言 (4)2.使用本操作手冊應注意事項 (4)3.安全上的應注意事項 (5)4.保證期間與保證範圍 (6)5.教導器的機能與規格 (7)5-1主要功能鍵與機能 (7)5-2規格 (8)5-3 RS232C端子(D-sub 25 DTE特殊※) (8)6.LCD顯示器上的功能鍵(略記) (9)7.程序構造 (11)7-1位置(Position) (11)7-2命令 (12)7-2-1SEL語言的構造 (12)7-2-2擴張條件 (13)8.操作順序的簡例 (14)8-1製作位置數據(Position Data) (15)8-2製作操作程序(Application Program) (21)8-2-1製作移動前章節所做成位置數據(Position Data)的操作程式(Application Program) (21)8-2-2當繼續輸入下一個程式時 (29)9.控制方法 (30)9-1程式控制方法 (30)9-2變更製作操作程序(Application Program) (31)9-2-1利用程式設定反覆相同動作時(Ins:插入, Del:刪除) (32)9-2-2在控制中途,除了用EXIT以外的停止方法(STOP:停止) (37)9-2-3輸入擴張條件的方法 (38)9-3控制位置(僅限於DS TYPE) (42)9-3-1間隔(STEP)控制 (42)9-3-2連續控制 (44)9-3-3連續控制的動作說明 (46)10.說明個別功能的畫面 (47)10-1程式狀態(Program Mode) (47)10-1-1位置編輯畫面 (47)10-1-2程式編輯畫面 (54)10-2動作狀態(Play Mode) (55)10-2-1輸入動作程式的狀態 (55)10-2-2輸入動作位置的狀態 (60)10-3參數狀態 (61)10-3-1軸別參數狀態 (61)10-3-2裝置的參數狀態 (66)10-4測詴狀態 (69)※附錄從緊急停止中恢復錯誤代碼一覽表用教導器查詢錯誤軸錯誤代碼與對應方法1.前言在此由衷感謝您購買SA控制器專用教導器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.前言打招呼由我和我为你服务多谢您购买本公司产品。
SA系列产品使用容易.体积小,可以自在控制传动装置与周边设备。
除此之外,使用SEL语言还可实现简单的高度控制梦想。
请仔细详读『操作说明书』。
2.安全上的应注意事项请详读下列内容,充分留意安全对策。
本产品以自动化机械等的驱动零组件开发而成,因此在自动化机器驱动源的转矩或速度方面,有请勿超乎标准以外的限制。
为了防止发生事故,请严守下列事项。
并请务必参照「安全规则」。
1.本书没有记载的操作方法,原则上请以「不可操作」解释。
对於本书内容如有不明之处,请与本公司联络。
2.传动装置与控制器之间的配线,请务必使用指定之正品。
3.当机械在运动状态,或者可运动状态(打开控制器电源状态)时,请勿站立在机械的运动范围。
另外也请在周围设置栅栏,以防止外人接近机械。
4.执行机械之安装调整作业,或者维修检查作业时,请务必关闭控制器电源。
并请将「作业中」铭板放置在明显的场所。
另外,请勿缠绕电线,也避免插入来路不明的电源插座里。
5.当复数人同时作业时,必须采取一个对应方法,以确认彼此安全作业。
特别是不论开.关电源,或驱动.手动马达等移动轴的作业,都必须发出声音确定安全後再进行作业。
6.当使用者(客户)需要延长配线时,因错误配线有可能会导致错误动作,因此请充分检查配线後,并确认正确配线方式後再打开电源。
附录「安全规则」关於产业用自动装置安全的JIS规格----「产业用自动装置之安全通则」(JIS B8433)於1983年3月1日制定,另外由劳动省於同年7月1日修改一部分的「劳动安全卫生规则」,以实施产业用自动装置之定义或,安全对策等规则。
在此所介绍的是,参考「劳动安全卫生规则」之产业用自动装置安全对策上的重要规则。
●特别教育(第36条第31号,第32号)第36条第31号操纵装置及记忆装置(包含可变序列控制装置及固定序列控制装置。
),以记忆装置资讯为基础之操纵装置之伸缩.屈伸.上下移动.左右移动,或者旋转动作或复合动作等,均可自动执行之机械(除了研究开发中之其他劳动大臣所制定之装置以外。
以下统称为「产业用自动装置」。
)之可动范围(以记忆装置之资讯为基础之操纵装置或其他产业用自动装置,每个部位的最大可动范围。
),该产业自动装置所执行之操纵装置的动作顺序.位置或设定速度.变更或确认(以下称为「教示等」)。
(除了切断产业用自动装置驱动源之执行装置)或者再产业用自动装置之可动范围内,执行该产业自动装置之教示等,与劳动者共同在该产业用自动装置的可动范围外,操作该教示等之相关机械业务。
第32号在产业用自动装置可动范围内执行该产业用自动装置之检查.修理或调整(除了教示等以外。
)或确认其结果(下号简称为「检查号」。
)(限於产业用自动装置执行运转中),或在产业用自动装置可动范围内,与劳动者共同执行该产业用自动装置检查等,在该产业用自动装置的可动范围外,操作该检查等之相关机械操作业务。
●防止自动运转中的危险第150条之4 当业者在运转产业用自动装置时(为了教示等,而执行运转产业用自动装置,以及在运转产业用自动装置中,务必要执行下列条款规定之作业的产业用自动运转时除外。
),劳动者接触该产业用自动装置有恐会产生危险时,请务必要设置防止发生危险的装置。
●确保教示等的安全第150条之3 当业者在产业用自动装置的可动范围内,进行该产业用自动装置之教示等作业时,为了防止该产业用自动装置因不刻意之做动所发生的危险,或者该产业用自动装置因错误动作导致发生危险,务必要有下列之措施。
但是第1号及第2号的措施,并不限於切断产业用自动装置驱动源以执行作业时。
1.制定下列事项规定,以正确执行作业。
a.产业用自动装置之操作方法与顺序b.作业中的操纵装置速度c.由复数作业员共同作业时,订定出一个确认方法d.发生异常状况时的措施e.发生异常现象时,停止产业用自动装置运转後,再度启动时的措施f.为了防止该产业用自动装置因不刻意之做动所发生的危险,或者该产业用自动装置因错误动作导致发生危险,所需之措施2.从事作业之劳动者或该劳动者之监视者,在发生异常状况时可以即时停止产业用自动装置运转之措施。
3.在执行作业时启动产业用自动装置开关等,为了防止从事作业之劳动者以外者任意操作之措施。
●确保检查作业时的安全第150条之5 业者在产业用自动装置可动范围内,执行产业用自动装置之检查.修理.调整(教示等除外。
).清洁或给油或确认其结果时,在停止运转该产业用自动装置的同时,在执行该作业时按该产业用自动装置的启动按键,为了避免从事做业者以外的人操作产业用自动装置之启动按键之措施。
但是在产业用自动装置运转中,务必要执行作业时, 为了防止该产业用自动装置因不刻意之做动所发生的危险,或者该产业用自动装置因错误动作导致发生危险,下列之措施则不在此限。
1.制定下列事项规定,以正确执行作业。
a. 产业用自动装置之操作方法与顺序b.由复数作业员共同作业时,订定出一个确认方法c.发生异常状况时的措施d.发生异常现象时,停止产业用自动装置运转後,再度启动时的措施e.为了防止该产业用自动装置因不刻意之做动所发生的危险,或者该产业用自动装置因错误动作导致发生危险,所需之措施2.从事作业之劳动者或该劳动者之监视者,在发生异常状况时可以即时停止产业用自动装置运转之措施。
3.在执行作业时启动产业用自动装置开关等,为了防止从事作业之劳动者以外者任意操作之措施。
●检查第151條业者在产业用自动装置可动范围内,执行教示等(切断产业用自动装置驱动源除外。
)之作业时,在开始执行作业之前,针对下列事项进行检查,而发生异常状况时,务必即刻修复之措施。
1.外部电线也无绝缘体或外部有无损伤2.操纵装置有无做动3.制动装置及紧急停止装置功能以上为劳动安全规则「特别教育(第36条第31号)」之产业用自动装置的定义:「操纵装置及记忆装置(包含可变序列控制装置及固定序列控制装置。
),以记忆装置资讯为基础之操纵装置之伸缩.屈伸.上下移动.左右移动,或者旋转动作或复合动作等,均可自动执行之机械(除了研究开发中之其他劳动大臣所制定之装置以外。
以下统称为「产业用自动装置」。
)」文中下线的劳动大臣适用外规格(不视为产业用自动装置)如下:(1)拥有定格输出(驱动用原动机为复数时),之80瓦以下的驱动用原动机械(2)用固定序列控制装置,反覆执行伸缩.屈伸.上下移动.左右移动,或者旋转动作,之其中单一动作机械(3)以圆形座标型机械的旋回转为中心,半径300mm以下之做动范围(4)从极座标型机械的旋回转为中心,在半径300mm的球内面之做动范围(5)用直交座标型之操纵装置之前端移动量,拥有某个方向300mm以下之移动量(6)用直交座标型之左右方向移动量为300mm以下时,而且上下方向之移动量为100mm以下(7)关於圆形.极直交之2种以上的组合,可适用於(3)~(5)之规定要件(8)反覆执行操纵装置前端不之单调直线运动3.保证期间与保证范围保证书1.本产品之保证期间,以购买日起算一年有效。
因产品缺陷引发故障者予以免费修理。
2.下记事项不符合保障期间之规定:a.没有依照操作说明书正确使用,导致故障b.自行加装电气或机械之改造c.行走距离超过500km时,导致零件消耗d.因火灾.地震.其他天灾,所发生之故障与损害e.其他(非本公司责任之故障.损害)关於保证内容,如上记所示。
4.各部名称与功能4-1 名称4-2 功能CODE显示……………………….显示控制器运转状态(3位数的显示器)。
LED显示…………………………READY :表示控制器处於可运转状态。
ALARM :表示装置异常。
BAT. :表示电池电压降低。
解除制动开关……………………RELEASE:解除制动器状态。
NORMAL:制动器为ON的状态(平常设定)解除制动开关,当显示出以下Servo Free时,则为有效状态:1.打开电源後,到进入回归原点命令为止的时间2.在Direct Teaching上选择「Svof」时3.发生警报时PORT开关……………………….ON :TEACHING/RS232 PORT为有效状态。
没有接续TEACHING/RS232 PORT专用插座时,则会变成紧急停止状态。
OFF:TEACHING/RS232 PORT为无效状态。
没有接续TEACHING/RS232 PORT专用插座时,也会解除紧急停止状态。
备注)打开控制器电源,拔出或插入TEACHING/RS232 PORT专用插座时,请让PORT开关在OFF的状态下再执行。
功能开关…………………………:功能切换开关。
COPY :从ROM到FLASH的复制开关。
F/R :FLASH和ROM的切换开关。
TEACHING / RS232 PORT插座………接续教导器或电脑的专用插座。
制动插座…………………………接续传动装置制动器的专用插座。
马达.编码装置插座……………...接续串动装置.编码装置的专用插座。
连接外部机器插座………………接续程序装置等外部机器的专用插座。
接地线端子台……………………接续接地线的专用M3 螺丝座。
电源.紧急停止端子台…………...POWER的N与24V为电源专用端子。
EMG的2个端子,为接续紧急停止开关的专用端子。
(出货时:短接EMG端子)备注)使用者所接续的电源配线,请参照右图指示。
(备注)这个控制器没有电源开关。
4-3 代码说明……………………..表示ON的状态……………………..表示串行I/O确认……………………..表示SEVRO CHECK……………………..表示PROGRAM CHECK……………………..表示READY……………………..表示FLASH MEMORY COPY……………………..表示结束FLASH MEMORY COPY……………………..表示UPDATE……………………..表示紧急停止……………………..CPU RESET……………………..表示回归原点……………………..表示启动程式NO.……………………..表示位置NO.(001~500)……………………..表示插入错误……………………..表示软体错误……………………..表示其他错误5.规格5-1控制器规格5-2 外部输出入规格外部输入规格备注)当外部接续无接点电路时,会产生泄露电流的错误动作,因此请利用开关OFF为1mA 以下的泄露电流。
外部输出规格备注1)每个输出内部均接续续流二极管(Fly wheel diode)。
备注2)缩短负荷或流出超过最大负荷的电流时,会损害输出电路,因此请特别注意。
外部输出入电路5-3 I/O界面一览表I/O界面会改变成程式模式状态,与位置模式状态。
下表为I/O界面一览表。
(程式模式)I/O 插座(34 Pin)功能电线颜色Pin No.区分PortNo.1A P24外部电源+24V输入1-茶1B输入PRG 输入1-红2A PRG 输入1-橙2B PRG 输入1-黄3A PRG 输入1-绿3B PRG 输入1-蓝4A PRG 输入1-紫4B预备1-灰5A输入CPU RESET1-白●Pin No. 1B(PRG 输入)~Pin (PRG ,请作为输入程式No.使用。