第五章_惩罚函数法
惩罚函数
综合等式约束和不等式约束情况,可以得到一
般约束优化问题的外点罚函数公式为:
实际计算中,因为惩罚因子 不可能达到无 穷大,故所得的最优点也不可能收敛到原问题 的最优点,而是落在它的外面,显然,这就不
能严格满足约束条件。为了克服外点惩罚函数 法的这一缺点,对那些必须严格满足的约束 (如强度、刚度等性能约束)引入约束裕 度 ,即将这些约束边界向可行域内紧缩, 移动一个微量,得到
一、惩罚函数介绍
如何把它转化为无约束求解
二维约束问题
对于机械优化设计一般式
外点惩罚函数
外点惩罚函数法的一般形式:
考虑不等式约束优化设计时:对 构造一般形式的外点惩罚函数为:
其中: (1)当满足所有约束条件时惩罚项为,即
考虑等式约束优化问题:
构造点罚函数:
同样,若X满足所有等式约束则惩罚项为0,;若 不能满足,则 且随着惩罚因 子的增大而增大。
这样用重新定义的约束函数来构造惩罚函数,
得到最优设计方案。
内点惩罚函数法
外点法和内点的区别
内点法将惩罚函数定义于可行域内且求解无
约束优化问题的搜索点总是保持在可行域内,一 般只用于不等式约束情况;外点法即可用于求解 不等式约束优化问题,又可用于求解等式约束优 化问题,主要特点是惩罚函数定义在可行域的外 部,从而在求解系列无约束优化问题的过程中, 从可行域外部逐渐逼近原约束优化问题最优解。
结论: (1)一般的优化方法,如惩罚函数法,当优化 变量的初始值取值范围不同时,往往会直接 影响优化结果,在使用当中应该加以注意和改 进。 (2)二次优化的惩罚函数法,将整个优化过程 分为连续变量惩罚函数法的初始优化、带离 散变量的惩罚函数再优化和网格法检验三步 进行,消除了优化变量初始值对优化结果的 影响,使优化结果更为准确、合理,是一种 很有参考价值的实用优化方法。
混合惩罚函数法5

g u x
2
mБайду номын сангаас(k )
f (x ,
r
(k )
) f (x )
因为:r max 0,
u 1
g u x 0
2
所以: x * r (u ) , r ( k ) f ( x * , (r ( k ) ))
(拟合曲线近似描述离散点的变化规律)
(1) 平均法:
找出这些离散点的公共值。这些离散点 相对于公共值,上下偏差代数和为零。以 这些公共值构造的代表表征这些离散数值 的规律。
具体步骤如下:
a)有m组数值,预选一个用以拟合的方程式。 将此组数值分别代入y ax 2 bx c 得到m个方程。
s
j
( x)
f ( x)
f
j
( x)
(s项最小函数 q - s项最大函数)
④乘除法 2)主要目标法 3)协调曲线法 4)设计分析法
见教材
P96~ 97
四 优化结果分析
优化设计计算完成后,必须对计算好结果, 进行仔细分析.比较,检查其合理性,发现和改正 一切可能的错误,以便得到一个符合工程实际的 最优化设计方案,检查优化设计结果可行性和全 理性. 1)与原始设计方案的目标函数作比较,通过 作图,曲线或列表,等原始方案的目标函数进 行比较,查看优化结果是否正常. 2)检查最优设计变量满足约束条件
2.内惩罚函数法 内惩罚函数法是求解不等式约束优化的一 种十分有效的方法,它要求初始点必须在可行 域内,迭代过程中所产生的多点均为可行设计 方案,因此使设计人员有挑选的余地,但这种 方法与外点法相比一般收敛较慢,递减系数C 应满足0<c<1 c=0.1~0.7
惩罚函数法及广义乘子法

转化求解法(一):罚函数法
内罚函数法
Step1 选取初始数据。给定初始点 x0 ,in初tS始参数
允(0许,1)误差 ,令 0
k 1
,缩1 小 系0 数
Step2 求解无约束问题,以x k 为1 初始点,求解无约束问题
设其最优解为 。x k
min s.t.
G(x,rk)f(x)kB(x)
xintS
(1)
hj (x) 0, j 1,2,L ,l
其中 f ( x ) ,gi(x)(i1 ,2,L,m )和 hj(x)(j1,2,L,l)
都是定
min f (x)
。
s.t. gi(x) 0,i 1,2,L ,m
hj (x) 0, j 1,2,L ,l
为约x束k 问题
转化求解法(一):罚函数法
外罚函数法例题
转化求解法(一):罚函数法
外罚函数法例题
转化求解法(一):罚函数法
外罚函数法例题
转化求解法(一):罚函数法
外罚函数法例题
4.6-2 内惩罚函数法
基本是想
在迭代中总是从可行点出发,并保持在可行域内部进行搜索。 因此,这种方法适用于只有不等式约束的最优化问题
(一)、等式约束下的广义乘子法
等式约束的最优问题
min s.t.
f
(x)
2
l
h2j
(x)
j1
hj (x) 0, j 1,2,L ,l
m x iR n nF (x , k) ,f设(x 其) 最k 优P 解(x ) 为 。
xk
Step3 检查是否满足终止准则,若 kP(xk,)则迭代终止,
min s.t.
f (x) gi(x) 0的, 近i 似1,最2,优L解,m;, 否则,
罚函数法

外罚函数法算法
Step1: 给出 x0 ∈ Rn (可是不可行点), > 0(ε =10−4 ) ε 罚因子 σ1(σ1 =1) , 放大系数 C(C =10) , k =1. Step2: 以 xk−1 为初始点求无约束问题: ~ m P( x,σk ) = f ( x) +σk P( x) 得 xk = x(σk ). in ~ Step3: 若 σk P(xk ) < ε , 则 x* = xk ,停; 否则转step4 Step4: 令 σk+1 = Cσk , k = k +1, 转step2.
Q f (xk ) ≤ P(xk ,σk ) ≤ f x
设其极限为 f . ∴ { f (xk )} 亦为单调有界序列, ~ ∴ lim σk P(xk ) = lim [P(xk ,σk ) − f (xk )] = p0 − f 0 k→+∞ k→+∞ ~ Q σk →+∞ ∴ lim P(xk ) = 0 k→+∞ ~ ~ ~ 且 P(x) 连续; P(~) = 0 即 ~ 为可行解 x ∴ x Q x →x
0
( )
*
Q x 为最优解;∴ f x* ≤ f (~) x ~, f (x) 连续; f (~) = lim f (x ) ≤ f (x* ) ∴ x Q xk → x k k→+∞ * ~) 即 ~ 为(3)的整体最优解. ∴ f x = f (x x
k *
( )
( )
外罚函数法评价
(1) 如果有了求解无约束问题的好算法,利用 外罚函数法求解约束问题很方便. (2) 每个近似解 x(σk ) 往往不是可行解,这是某 些实际问题所无法接受的. 内罚函数法可以解决. (3) 由收敛性定理 σk 取越大越好, σk 越大将 而 造成增广目标函数 P( x,σ ) 的Hesse阵条件数越 大,趋于病态,给无约束问题求解增加很大困 难,甚至无法求解.乘子法可解决这个问题.
机械优化设计第五节约束优化-惩罚函数法3-5
外点法求解时,惩罚函数的形式为:
(k ) ( x, r ) f ( x) r max 0, gu ( x) r hv ( x) u 1 v 1
(k ) (k ) m p 2 2
k 1, 2
r
(1) ( 2)
(k )
内点法对企图从内部穿越可行域的点施以惩 g x 0 时,则障碍项的 罚。设计点离边界越近 值急剧增大,并趋向无穷大,于是惩罚越大,于是惩 罚函数 ( x r ( k ) )亦随之急剧增大至无穷大.
u
就好像在可行域的边界上设置很高的障 碍,从而保障迭代点一直在可行域内而又趋向 于约束最优点。当 k r ( k ) 0时,才能求得 原约束问题的最优解。 参数的选取和确定:
(0)
(2)初始惩罚因子 r
(0)
的选择
) . 初始惩罚因子 r ( 0的选择对于计算效率影响很大
若r x, 项)的作用就会很小,
x, r ( k )
( 0 ) 值得太小,则在惩罚函数中障碍项(惩罚
r
(k )
f ( x)
这时求惩罚函数 的无约束极值点。 犹如求原目标函数 f ( x)本身的无约束极值点而 这个极值点 x又不大可能接近 f ( x) 的约束极值点,
D.收敛条件: 同时满足:(1)相邻两次惩罚函数值相对变化 足够小; (2)相邻两次惩罚函数无约束最优 点的距离足够小。
(k ) x r
* (k ) ( k 1) ( k 1) , r x r , r 1 * ( k 1) ( k 1) x r , r
内点惩罚函数法

式中: ( X , r
(K )
) ——增广目标函数;
j 1
k 1
r(K )Fra bibliotek,m(K )
——惩罚因子;
G[ g j ( X )], H[hk ( X )] ——惩罚项;
内点惩罚函数法的一般形式: p ( X , r (K ) ) f ( X ) r (K )
j 1
1 g j (X )
;
3.构造惩罚函数,调用无约束优化方法,求解
min ( X , r ( K ) ) 的极值点;
4.检验迭代终止条件
* * XK XK 1 1 ,
1 104 ~ 105
2
或
k*
* k
* k 1
2 10 ~ 10
3
4
* X 若满足,则输出 K ;
内点惩罚函数法
1.惩罚函数法的基本思想:
根据约束特性构造惩罚函数,并将其加到目 标函数中去,将约束非线性规划问题转化为一 系列无约束极值子问题,然后按无约束优化方 法来求解。这种“惩罚”策略,给于无约束极 值问题求解过程中企图违反约束的那些迭代点 以很大的目标函数值,而子问题的目的是极小 化目标函数,这样迫使无约束子问题的极小点 趋向于满足约束条件。重复此过程使得它们的 解在极限情况下趋向原问题的约束极小值。
惩罚函数法属于间接法,它先建立一个新函数 即惩罚函数,把有约束问题转化为一系列无约 束优化问题来处理,这种转化必须满足两个前 提条件:
1.不破坏原约束优化问题的约束条件;
2. 最优解必须归结到原约束优化问题最优解上
( X , r ( K ) ) f ( X ) r ( K ) G[ g j ( X )] m( K ) H [hk ( X )]
罚函数法
就是Hesse矩阵,这时大于零(或小于零)与Hesse的正 矩阵,这时大于零(或小于零) 就是 矩阵 的正 或负定)是一致的, 定(或负定)是一致的,二者都可作为判定泛函数极值的 充分条件。 充分条件。
式中: 式中:x(t)---m维状态函数向量; w(t)---r维决策函数向量; f---微分形式状态方程; t---时间变量; t0---初始时刻; tf---终止时刻。
目标函数随状态变量和决策变量的不同而 不同,也就是说目标函数是函数都是函数。在 不同,也就是说目标函数是函数都是函数。 数学上,这种函数称为泛函, 数学上,这种函数称为泛函,求泛值的问题称 为变分问题。 为变分问题。 因此, 因此,连续系统的最优化问题就是一个变 分问题。 分问题。由于求泛函的极小问题也是一种极值 问题。 问题。 对于无约束问题, 对于无约束问题,根据极值存在的充分必 要条件求极值;对于有约束的最优化问题, 要条件求极值;对于有约束的最优化问题,则 先利用拉格朗日函数或罚函数, 先利用拉格朗日函数或罚函数,将其转化成无 约束最优化问题后再求解。 约束最优化问题后再求解。
动态系统参数的最优化又称连续系统最优化,因 为优化问题的解是t的连续函数。 动态参数优化问题的一般模型:
min J = min{
∫
tf
t0
F [ x ( t ), w ( t ), t ] dt + s [ x ( t f ), t f ]}
dx ( t ) s .t . = f [ x ( t ), w ( t ), t ] dt g [ x ( t ), w ( t ), t ] ≥ 0 c [ x ( t ), w ( t ), t ] = 0 初始条件: x (t 0 ) = x 0
分享:惩罚函数法(内点法、外点法)求解约束优化问题最优值
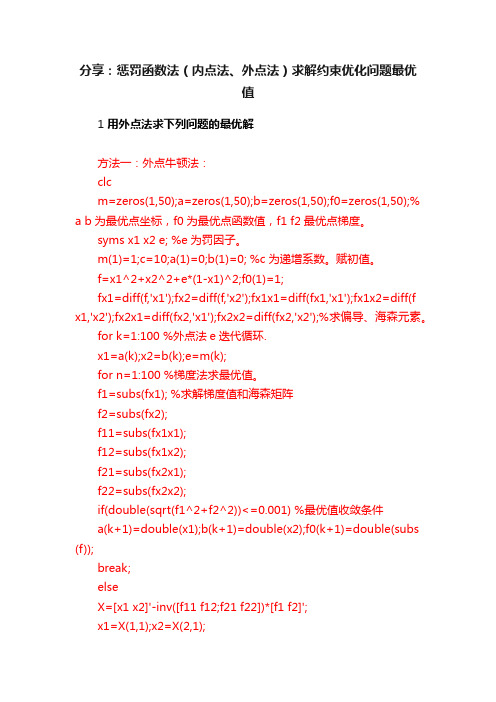
分享:惩罚函数法(内点法、外点法)求解约束优化问题最优值1 用外点法求下列问题的最优解方法一:外点牛顿法:clcm=zeros(1,50);a=zeros(1,50);b=zeros(1,50);f0=zeros(1,50);% a b为最优点坐标,f0为最优点函数值,f1 f2最优点梯度。
syms x1 x2 e; %e为罚因子。
m(1)=1;c=10;a(1)=0;b(1)=0; %c为递增系数。
赋初值。
f=x1^2+x2^2+e*(1-x1)^2;f0(1)=1;fx1=diff(f,'x1');fx2=diff(f,'x2');fx1x1=diff(fx1,'x1');fx1x2=diff(fx1,'x2');fx2x1=diff(fx2,'x1');fx2x2=diff(fx2,'x2');%求偏导、海森元素。
for k=1:100 %外点法e迭代循环.x1=a(k);x2=b(k);e=m(k);for n=1:100 %梯度法求最优值。
f1=subs(fx1); %求解梯度值和海森矩阵f2=subs(fx2);f11=subs(fx1x1);f12=subs(fx1x2);f21=subs(fx2x1);f22=subs(fx2x2);if(double(sqrt(f1^2+f2^2))<=0.001) %最优值收敛条件a(k+1)=double(x1);b(k+1)=double(x2);f0(k+1)=double(subs (f));break;elseX=[x1 x2]'-inv([f11 f12;f21 f22])*[f1 f2]';x1=X(1,1);x2=X(2,1);endendif(double(sqrt((a(k+1)-a(k))^2+(b(k+1)-b(k))^2))<=0.001)&&(double(abs((f0(k+1)-f0(k))/f0(k)))<=0.001) %罚因子迭代收敛条件a(k+1) %输出最优点坐标,罚因子迭代次数,最优值b(k+1)kf0(k+1)break;elsem(k+1)=c*m(k);endend方法二:外点梯度法:clcm=zeros(1,50);a=zeros(1,50);b=zeros(1,50);f0=zeros(1,50);syms d x1 x2 e;m(1)=1;c=10;a(1)=0;b(1)=0;f=x1^2+x2^2+e*(1-x1)^2; f0(1)=1;fx1=diff(f,'x1');fx2=diff(f,'x2');for k=1:100x1=a(k);x2=b(k);e=m(k);for n=1:100f1=subs(fx1);f2=subs(fx2);if(double(sqrt(f1^2+f2^2))<=0.002)a(k+1)=double(x1);b(k+1)=double(x2);f0(k+1)=double(subs (f));break;elseD=(x1-d*f1)^2+(x2-d*f2)^2+e*(1-(x1-d*f1))^2;Dd=diff(D,'d'); dd=solve(Dd); x1=x1-dd*f1; x2=x2-dd*f2;endendif(double(sqrt((a(k+1)-a(k))^2+(b(k+1)-b(k))^2))<=0.001)&&(double(abs((f0(k+1)-f0(k))/f0(k)))<=0.001) a(k+1)b(k+1)kf0(k+1)break;elsem(k+1)=c*m(k);endend2,点法求下列问题的最优解内点牛顿法clcm=zeros(1,50);a=zeros(1,50);b=zeros(1,50);f0=zeros(1,50);syms x1 x2 e;m(1)=1;c=0.2;a(1)=2;b(1)=-3;f=x1^2+x2^2-e*(1/(2*x1+x2-2)+1/(1-x1)); f0(1)=15;fx1=diff(f,'x1');fx2=diff(f,'x2');fx1x1=diff(fx1,'x1');fx1x2=diff(f x1,'x2');fx2x1=diff(fx2,'x1');fx2x2=diff(fx2,'x2');for k=1:100x1=a(k);x2=b(k);e=m(k);for n=1:100f1=subs(fx1);f2=subs(fx2);f11=subs(fx1x1);f12=subs(fx1x2);f21=subs(fx2x1);f22=subs(fx2x2);if(double(sqrt(f1^2+f2^2))<=0.002)a(k+1)=double(x1);b(k+1)=double(x2);f0(k+1)=double(subs (f));break;elseX=[x1 x2]'-inv([f11 f12;f21 f22])*[f1 f2]';x1=X(1,1);x2=X(2,1);endendif(double(sqrt((a(k+1)-a(k))^2+(b(k+1)-b(k))^2))<=0.001)&&(double(abs((f0(k+1)-f0(k))/f0(k)))<=0.001) a(k+1)b(k+1)kf0(k+1)break;elsem(k+1)=c*m(k);endend。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
小结
由以上可见,如果选择一个可行点作初 始点 x ( 0 ) ,令其罚因子 r ( k ) 由大变小, 通过求罚函数 ( x, r ( k ) ) 的一系列最优点,
显见,无约束最优点序列将逐渐趋近于原约 束优化问题的最优点x*。
* xk (k 0,1,2, )
㈡内点罚数法的形式及特点
⑴具有不等式约束的优化问题的数学模型
㈢初始点x(0)的选取
由于内点法的搜索是在可行域内进行,显然初始点必须 是域内可行点。须满足
确定初始点常用如下两种方法
⑴自定法 即根据设计者的经验或已有的计算资料自行决 定某一可行点作为初始点。 ⑵搜索法 任选一个设计点 为初始点。通过对初始点 约束函数值的检验,按其对每个约束的不满足程度加以调 整,将 点逐步引入到可行域内,成为可行初始点, 这就是搜索法。
5.3.4.2 外点法
外点法可以解不等式约束优化问题或等式约束优化问题
㈠引例
设有一维不等式优化问题的数学模型
S.T. :
用外点法构造惩罚函数,具体构造形式如下 x≥b x<b
写成另一种形式
如上图,此处的惩罚函数也是由原目标函数F(x)与惩罚 项而组成。惩罚项中包含有可调整的参数r(k)与约束函数。 由惩罚项的构造可知,若迭代点在可行域的内部,惩罚 项的值为0,惩罚函数值与原目标函数值相等;而若在非可 行域(即可行域的外部),惩罚项是以约束函数的平方加 大的,即迭代点违反约束越严重,惩罚项的值增加的越大。 因此,在非可行域内,必有 且罚因子r(k)越 大,惩罚作用越明显。 由图,对于某r(k)值,求出惩罚函数 的最优点 当取罚因子 为递增数列,随k的增加,罚函数的无约束最 优点序列为
1 g1( x)
⑶若对于罚因子的取值由初始的 逐渐变小 时,惩罚函数 ( x, r ( k ) ) 愈逼近于原目标函数F(x),罚 函数曲线越来越接近于原F(x)=ax直线,如图所示,对 * * 应罚函数 ( x, r ( k ) ) 的最优点列 x0 , x1 , 不断趋近于原约 束优化问题的最优点x*=b
S.T. :
u=1,2……,p
1 u 1 g u ( x)
p
⑵构造如下形式的内点罚函数
( x, r ) F ( x ) r
(k )
(k )
关于惩罚因子规定为正,即 。且在优化过程中 是减小的,为确保为递减数列,取常数C
r ( k ) Cr ( k 1) , 称系数C为罚因子降低系数
㈣关于几个参数的选择
⑴初始罚因子r(0)的选取
如果 值选得太大,则在一开始罚函数的惩罚项的 值将远远超出原目标函数的值,因此,它的第一次无约束极 小点将远离原问题的约束最优点。在以后的迭代中,需要很 长时间的搜索才能使序列无约束极小点逐渐向约束最优点逼近。
如果 值选得太小,则在一开始惩罚项的作用甚小, 而在可行域内部惩罚函数 与原目标函数F(x)很相近, 只在约束边界附近罚函数值才突然增高。这样,使其罚函数 在在约束边界附近出现深沟谷地,罚函数的性态变得恶劣。
5.3.4 惩罚函数法
惩罚函数法简介 内点法 外点法 混合法 总结
惩罚函数法简介
惩罚函数法是一种使用很广泛、很有效的间接法。
基本原理: 把约束优化问题转化成无约束优化问题来求解。 两个前提条件: 一是不破坏原约束的约束条件 二是最优解必须归结到原约束问题的最优解上去
按照惩罚函数的构成方式,惩罚函数法分为三种: 外点法、内点法、混合法
S.T. :
h1(x)=x1+x2-10=0
如右图,h1(x)为该约束 问题的可行域,这条直线以 外的整个x1ox2平面为非可 行域。目标函数等值线与该 直线的切点为最优点
最优点
按外点法的基本思想,构造惩罚函数 x∈D x∈D 在可行域上,惩罚项的值为零,惩罚函数值与原目标函数 值相同;在非可行域上,惩罚函数的值恒为正,罚函数大于 原目标函数,即在可行域外惩罚项起到了惩罚作用。 对于m(k),随着k的增大,得无约束最优点列
惩罚函数
r(k) 、m(k)-----罚因 子
惩罚项
5.3.4.1 内点法
㈠引例
设有一维不等式约束优化问题的数学模型
S.T. :
由图可见,目标函数的可行域为x≥b,在可行域内目标函数 单调上升,它的最优解显然是 x*=b ,F*=ab
对引例的惩罚函数进行分析,以对内点法有初步认识: ⑴本问题是不等式约束优化问题,故只有一项惩罚项 ,一个罚因子 ⑵规定罚因子 为某一正数,当迭代点是在可行域内 时,则惩罚项的值必为正值,因此必有
(0) * xk 1 xk
-
k k 1
㈦内点罚函数的特点
内点法只适用于解不等式约束优化问题。由于内点法 需要在可行域内部进行搜索,所以初始点必须在可行域 内部选取可行设计点。 内点法的突出优点在于每个迭代点都是可行点 因此,当迭代达到一定阶段时,尽管尚没有达到最优点, 但也可以被接受为一个较好的近似解。
㈢对几个问题的讨论
(1)初始点x(0)的选取 在可行域及非可行域内均可。
(2)初始罚因子r(0)和递增系数C的选取
外点法中,这两者的选择对算法的成败和计算速度有显著 的影响。
选取过小,则序贯 无约束求解的次数就增 多,收敛速度慢;反之, 则在非可行域中,发函 数比原目标函数要大得 多,特别在起作用约束 边界处产生尖点,函数 性态变坏,从而限制了 某些无约束优化方法的 使用,致使计算失 败。 C的选取影响不大,通 常C=5-10
x∈Rn 任选初始点x(0),初始法罚因子r(0)>0,罚因子递增系数C>1 对于r(k)为某一值,同过对惩罚函数的无约束求优,可 得最优点 。随着k的增大,得无约束最优点列
在k←∞的过程中,点列将趋近于原问题的最优点
实线为原目标 函数等值线
虚线为罚函数 等值线
总结 由上图可见,两种等值线在可行域内部及边界上是重合 的;而在非可行域中,罚函数的等值线升高了。即只有在 可行域外部惩罚项才起到惩罚的作用。r(k)值越大,惩罚作 用越大。 由上b图可知,在起作用约束边界处罚函数等值线变得越 密集和越陡峭。随r(k)的增大,最优点列将越接近于原约束 优化问题的最优点x*。但须注意,近似的最优点是落在边 界处非可行域一侧。
如下图,对于有深沟谷地性态差的函数,不仅搜索所需的 时间长,而且很难使迭代点进入最优的邻域,以致极易使 迭代点落入非可行域而导致计算的失败。
或
r(0)=1~50
⑵递减系数C的选择 罚因子递减系数C的选择,一般认为对算法的成败影响 不大。规定0<C<1。 若C值选得较小,罚因子下降快,可以减少无约束优化 的次数,但因前后两次无约束最优点之间的距离较远,有 可能使后一次无约束优化本身的迭代次数增多,而且使序 列最优点的间隔加大,对约束最优点的逼近不利。 相反,若C值取得较大,则无约束优化次数就要增多。
该序列将趋近与原约束问题的最优点x*,x*=b。 值得注意的是,尽管 增加直至趋于无穷大,但最终 的近似最优点x*仍在可行域的外部。 即外点法构造的罚函数是使迭代点从可行域的外部逐 渐逼近约束最优点,这正是外点法名称的由来。
㈡外点罚函数法的形式及特点
先讨论解不等式约束优化问题 设有不等式约束优化问题
=0 关于惩罚项 r ( k )
u 1 p
0<C<1
或
1 ,由于在可行域内有 g u ( x) 0 , g u ( x)
且 r ( k ) 永远取正值,故在可行域内惩罚项永为正。 r ( k ) 的值越小则惩罚项的值越小。
由于在约束边界上有 ,因此,当设计点趋 于边界时,惩罚项的值将趋于无穷大。由此可知,在可 行域内,始终有 。 当 时 ,却有 ,所以整个最 优化的实质就是用罚函数 去逼近原目标函数F(x); 当设计点逐渐由内部趋近于边界时,由于惩罚项无穷 增大,则罚函数也将无穷增大。 从函数图形上来看,犹如在可行域的边界上筑起一 道陡峭的高墙,使迭代点自动保持在可行域内,用此办 法来保证搜索过程自始至终不离开可行域。所以,内点法 也常称为围墙函数法。
而且,当x越趋近于约束边界时,由于惩罚项 r ( k )
增大,所以罚函数 ( x, r ( k ) ) 的值越大。当x←b时,罚函 数的值将趋近于+∞。因此,当初始点取在可行域内,求 函数 ( x, r ( k ) ) 的极小值时,只要适当控制搜索步长, 防止迭代点跨入非可行域,则所搜索到的无约束极小点 x*必可保持在可行域内。
通常建议取C=0.1--0.5
㈤终止准则
随着罚因子 的值不断减小,罚函数的序列无约 束最优点将越来越趋近于原约束优化问题的最优点。 设惩罚函数 的无约束最优点列为
对应的罚函数值为
终止准则可用下述两者之一
⑴相邻两次惩罚函数无约束最优点之间的距离已足够的小。
设ε1为收敛精度,一般取ε1=10-4-10-5,则需要满足
⑵相邻两次惩罚函数值的相对变化量已足够小。 设ε2为收敛精度,一般取ε2=10-3-10-4,则需要满足
㈥算法步骤
⑴构造内点惩罚函数 ⑵选择可行初始点 数C,收敛精度 与 ⑶求无约束优化问题, ⑸臵k←k+1, ,初始罚因子 ,臵k←0 ,罚因子降低系 。
有最优点
⑷当k=0时转步骤⑸,否则转步骤⑹ ,并转步骤⑶ ⑹由终止准则,若满足则转步骤⑺,否则转⑸ ⑺ , 输出最优解(x*,F*)
终止准则可用下述两者之一
⑴相邻两次惩罚函数无约束最优点之间的距离已足够的小。
设ε1为收敛精度,一般取ε1=10-4-10-5,则需要满足
⑵相邻两次惩罚函数值的相对变化量已足够小。 设ε2为收敛精度,一般取ε2=10-3-10-4,则需要满足
㈣算法步骤与流程图
入口
给定:x(0) ∈R ,r(0),C,ε1,ε2
算法步骤 ⑴在n维空间任取初始点x(0) ⑵选取初始罚因子r(0),递增系数C,并臵k←0 ⑶求 ,得最优点