单自由度体系的自由振动
结构力学课件之单自由度体系的振动

2.2 单自由度体系的强迫振动
单自由度体系的强迫振动的微分方程: y m ky P(t) y k P(t) 2 P(t) y 可写成: y m y 2. 当荷载为简谐荷载时: P(t) F sin t 2 m P(t) ky y F sin t y m 3. 微分方程的解为: m y m受力图 y F 2 1 2 (sint sin t) yst (sint sin t) m 1 2 1 2 为动力系数。 F yst 2 为静荷载F作用下的振幅。 1 2 m 时,振幅会趋近于无穷大,这种现象叫共振。
tg
1
y0 0 v
2.1 单自由度体系的自由振动
三、结构的自振周期 y 从微分方程的解: (t) a sin(t ) 知位移是周期函数; 自振周期T:振动一周需要的时间; T 2 2 m 2 m k 自振频率f:单位时间的振动次数; f 1 T 2 圆频率或角频率:2 时间内的振动次数; 2 2 2f k 1 T m m 自振周期的性质:
2 k EI 2 2 4 3 4 48EI 2 1 48EIg k 1 3 m m m Ql
11 5
EI
0.5l
1 EI
0.5l
0.25l 2n 2 500 52.36 / s 2. 荷载频率: 60 60 M 1 1 2 2 5.93 3. 动力系数: 为动力位移和动力应 52.36
1. 自振周期仅与结构的质量和刚度有关;与外界的干扰力无关。 2. 质量越大,周期越大; 刚度越大,周期越小。 3. 自振周期是结构动力性能的一个重要指标。
例1:图示等截面竖直悬臂杆,长度为l,截面面积为A,惯性矩 为I,弹性模量为E。杆顶重物的质量为m。杆的质量忽略不 计,试分别计算水平振动和竖向振动的自振周期。 解:解题的依据 T 2 2 m 2 m m k
12.3 单自由度体系的自由振动
各杆EI= 。 【例12-5】试求图示结构的ω。各杆 =C。 】
3l 4 B C D m B y A l l l 4 A l C D l
1
M1 图
解:
δ 11
7l 3 = 12 EI
1 12 EI EI = = 1.309 ω= 3 mδ11 7ml ml 3
All Rights Reserved 重庆大学土木工程学院®
【注二】惯性力 FI = −m&& = maω 2 sin(ωt + α ) = mω 2 y , 注二】 y FI 永远与位移方向一致,在数值上与位移成比例, 永远与位移方向一致,在数值上与位移成比例,其比例系 数为 mω 2 。
All Rights Reserved
重庆大学土木工程学院®
12.3.4 自振周期与自振频率
1.自振周期 自振周期 因
y = a sin (ωt + α ) = a sin (ωt + α + 2 π ) 2π = a sin ω t + + α = a sin[ω (t + T ) + α ] ω
所以自振周期
T =
2π
ω
表示体系振动一次所需要的时间,其单位为 ( 表示体系振动一次所需要的时间,其单位为s(秒) 。
式中, 为重力加速度 为重力加速度; 式中,g为重力加速度;W=mg为质点 为质点 的重力; 表示将重力W=mg 的重力;∆st=Wk11,表示将重力 施加于振动方向所产生的静位移。 施加于振动方向所产生的静位移。
All Rights Reserved 重庆大学土木工程学院®
T = 2π ∆st g
All Rights Reserved 重庆大学土木工程学院®
结构力学-单自由度体系的自由振动

mh3 T 2 24 EI
Vibration Characteristic
y(t ) Asin( t )
Acceleration: Inertia Force:
(t ) A 2 sin(t ) y (t ) mA 2 sin(t ) I (t ) m y
这是一个齐次方程,其通解为
y(t ) C1 cost C2 sin t
C1 和 C2 可由初始条件确定,设初始位移和初始速度分别为
y(0) y0 C1 y0
(0) v0 y
C2
v0
v0
,
y (t ) y0 cos t
sin t
y (t ) y0 cos t
在无阻尼自由振动中,位移、加速度和惯性力都按正弦规律
变化,且作相位相同的同步运动,即它们在同一时刻均达极值,
而且惯性力的方向与位移的方向一致。
幅值产生于
sin(t ) 1 时,其值分别为:
y A
A 2 y
I mA
2
由于在运动的任一瞬时质体都处于平衡状态,在幅值出现时
l
1 m
EA ml
st Wl T 2 2 g EAg
例: 求图示结构自振频率 。(EI 为常数,杆件自身 质量不计) [分析] 图乘法求位移
A m C l h
1 1 2 2 1 2 h2 B ( h h hl h) (h l ) EI 2 3 2 3 3EI
y y
v0
sin t
T
0
t
y cos t
-y
y
单自由度系统(自由振动)
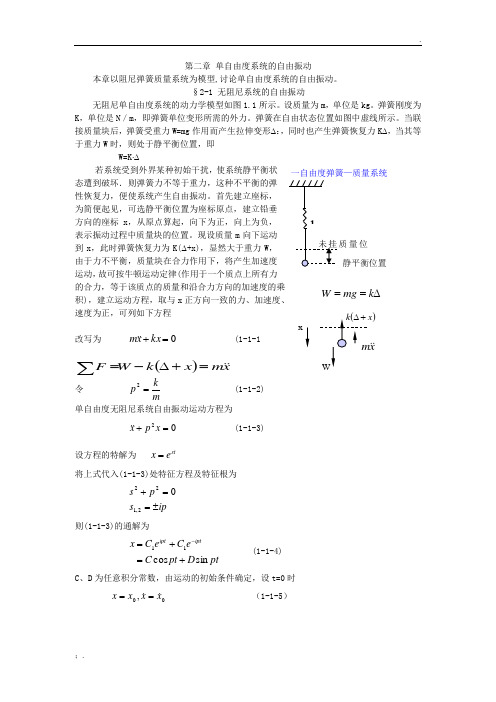
第二章 单自由度系统的自由振动本章以阻尼弹簧质量系统为模型,讨论单自由度系统的自由振动。
§2-1 无阻尼系统的自由振动无阻尼单自由度系统的动力学模型如图1.1所示。
设质量为m ,单位是kg 。
弹簧刚度为K ,单位是N /m ,即弹簧单位变形所需的外力。
弹簧在自由状态位置如图中虚线所示。
当联接质量块后,弹簧受重力W=mg 作用而产生拉伸变形∆:,同时也产生弹簧恢复力K ∆,当其等于重力W 时,则处于静平衡位置,即 W=K ⋅∆若系统受到外界某种初始干扰,使系统静平衡状态遭到破坏.则弹簧力不等于重力,这种不平衡的弹性恢复力,便使系统产生自由振动。
首先建立座标,为简便起见,可选静平衡位置为座标原点,建立铅垂方向的座标x ,从原点算起,向下为正,向上为负,表示振动过程中质量块的位置。
现设质量m 向下运动到x ,此时弹簧恢复力为K(∆+x),显然大于重力W ,由于力不平衡,质量块在合力作用下,将产生加速度运动,故可按牛顿运动定律(作用于一个质点上所有力的合力,等于该质点的质量和沿合力方向的加速度的乘积),建立运动方程,取与x 正方向一致的力、加速度、速度为正,可列如下方程 改写为 0=+kx xm (1-1-1 令mkp =2(1-1-2)单自由度无阻尼系统自由振动运动方程为02=+x p x(1-1-3)设方程的特解为 ste x =将上式代入(1-1-3)处特征方程及特征根为ips p s ±==+2,1220则(1-1-3)的通解为ptD pt C e C e C x ipt ipt sin cos 11+=+=- (1-1-4)C 、D 为任意积分常数,由运动的初始条件确定,设t=0时00,x xx x == (1-1-5)()x m x k W F=+∆-=∑量位静平衡位置 一自由度弹簧—质量系统 ∆==k mgW xx)则pt pxpt x x sin cos 00 += (1-1-6)经三角变换,又可表示为)sin(α+=pt A x(1-1-7)其中 001220,x px tg p x x A -=⎪⎪⎭⎫ ⎝⎛+=α (1-1-8) 自由振动的振幅A 和初相位角α与系统的参数和初始条件有关。
第二章 单自由度系统的自由振动

k
I
在圆盘的静平衡位置上任意选一根半径作 为角位移的起点位置
由牛顿第二定律:
I&& k 0
&& 02 0
扭振固有频率
0
k I
第二章 单自由度系统的自由振动
由上例可看出,除了选择了坐标不同之外,角振动与直线振动的数学描述 完全相同。如果在弹簧质量系统中将 m、k 称为广义质量及广义刚度,则弹 簧质量系统的有关结论完全适用于角振动。以后不加特别声明时,弹簧质 量系统是广义的 。
对时间求导 取平衡位置为势能零点,根据自由振动的特点,系统在平衡位置时,系统的势能 为零,其动能的极大值就是全部机械能;而在振动系统的极端位置时,系统的动 能为零,其势能的极大值等于全部的机械能,即有:
例题讲解3 均匀悬臂梁长为 l, 弯曲刚度为EJ,重量不计, 自由端附有重为P=mg的物体,如图所示。试 写出物体的振动微分方程,并求出频率。 梁的自由端将有静挠度: 物体的振动微分方程为:
8
第二章 单自由度系统的自由振动
例题讲解3 重物落下,与简支梁做完全非弹性碰撞
梁长 L,抗弯刚度 EJ m
h
第二章 单自由度系统的自由振动
2.1 简谐振动
由牛顿定律,有 设系统固有频率为 二阶常系数线性齐次常微分方程
通解形式为
1
第二章 单自由度系统的自由振动
根据三角关系式
改 写
由此可以知道:该系统以 固有频率作简谐振动。
振动周期:
振动频率:
2
第二章 单自由度系统的自由振动
设在初始时刻t=0,物体有初位移
弹簧原长位置
m&x& kx 0
单自由度系统自由振动

取物块的静平衡位置为坐标原点 O , x 轴顺弹簧 变形方向铅直向下为正。当物块在静平衡位置 时,由平衡条件,得到
mg k st
弹簧的静变形
当物块偏离平衡位置为x距离时,物块的运动微 分方程为
mx mg k ( st x)
mx kx
k 固有圆频率 令 : 0 m 无阻尼自由振动微分方程 2018年9 月4日
周期 T 2
0
; 则
1 0 2 2f T
f 称为振动的频率,表示每秒钟振动的次数,单位为1/s或Hz
0 称为固有角(圆)频率(固有频率),表示每2秒内振动
2018年9月4日 《振动力学》
的次数,单位为rad/s,只与系统的质量m和刚度系数k有关。
8
1.单自由度系统自由振动-无阻尼自由振动
统固有的物理参数,称为固有频率,振幅取决 于初始扰动的大小。阻尼振动的固有频率小于 无阻尼情形。临界阻尼和大阻尼条件下的系统 作非往复的衰减运动。
2018年9月4日 《振动力学》
3
单自由度系统自由振动
教学内容
• 无阻尼自由振动 • 能量法 • 等效质量和等效刚度 • 阻尼自由振动
2018年9月4日 《振动力学》
c1 A sin ,
c2 A cos
x t A sin 0 t
2018年9月4日 《振动力学》
无阻尼自由振动是简谐振动.
7
1.单自由度系统自由振动-无阻尼自由振动
1.2 无阻尼自由振动的特点
(1)固有频率
无阻尼自由振动是简谐振动,是一种周期振动
0 ( t T ) 0t 2
振动不能维持等幅而趋于衰减,称为有阻尼自由
单自由度体系自由振动,速度相位与位移相位的关系

单自由度体系(Single Degree of Freedom System, SDOF)是工程动力学中的一个重要概念,它对于描述系统的振动特性有着重要的作用。
在自由振动过程中,速度相位与位移相位之间存在着密切的关系。
本文将从单自由度体系自由振动的基本原理入手,探讨速度相位与位移相位之间的关系,希望通过本文的介绍,读者能够对这一问题有更加清晰的认识。
一、单自由度体系自由振动的基本原理1. 自由振动的基本概念自由振动是指在没有外界干扰的情况下,系统在一定的初位移或初速度作用下,由于其自身的惯性和弹性特性而产生的振动现象。
在工程领域中,自由振动是一种非常常见的振动形式,因此研究自由振动对于工程设计和分析有着重要的意义。
2. 单自由度体系的定义单自由度体系是指系统中只有一个自由度可以自由变化的体系。
在动力学领域中,单自由度体系被广泛应用于描述各种机械、土木和航空航天结构的振动特性。
它是一种简化模型,但对于许多实际工程问题的分析具有较高的适用性。
3. 自由振动的基本方程单自由度体系的自由振动可以通过一阶微分方程来描述。
其基本方程可以表示为:\[m\ddot{x}+c\dot{x}+kx=0\]其中,\(m\)为系统的质量,\(c\)为系统的阻尼系数,\(k\)为系统的刚度,\(x\)为系统的位移函数,\(t\)为时间。
二、速度相位与位移相位的定义1. 速度相位的定义在振动过程中,速度相位是指速度\(v\)相对于位移\(x\)的相位差。
通常用一个角度来表示,它可以用来描述振动的快慢和超前滞后关系。
2. 位移相位的定义位移相位是指位移\(x\)相对于某一固定参考点的相位差。
它也通常用一个角度来表示,可以用来描述振动的相对位置。
三、速度相位与位移相位的关系速度相位与位移相位之间存在着密切的关系。
在自由振动过程中,它们之间满足以下关系:\[tan(\phi_v-\phi_x)=\frac{2\zeta}{1-\omega^2}\]其中,\(\phi_v\)为速度相位,\(\phi_x\)为位移相位,\(\zeta\)为系统的阻尼比,\(\omega\)为系统的固有频率。
单自由度体系的自由振动
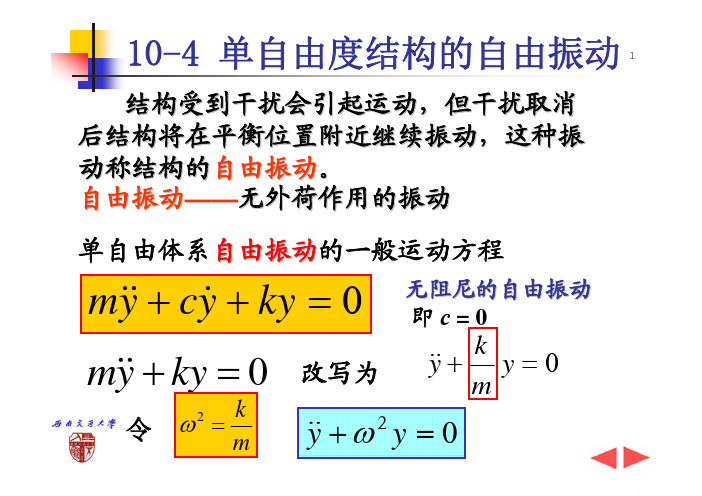
令
ω2 = k
m
y + ω 2 y = 0
运动方程的解 y + ω 2 y = 0 可由振动的初 2
始条件来确定
常系数的线性齐次微分方程,其通解为
y(t) = A1 cosωt + A2 sinωt
若当 t = 0 时 y = y0 初位移
y(0) = y0 = A1 cosω × 0 + A2 sin ω × 0
因此,自振周期(或频率)的计算十分重 要。
例 计算自振频率
14
EI=常数
如果让振动体系沿振动方向发生单位位移时,所有刚 结点都不能发生转动(如横梁刚度为无穷大的刚架) 计算刚度系数方便。
两端刚结的杆的侧移刚度为:12EI
l3
一端铰结的杆的侧移刚度为:3EI
l3
例 计算自振频率
1
k11
EI=常数
12 EI l3
y = y0 初速度
y(0) = y0 = −ωA1 sinω × 0 + ωA2 cosω × 0
A1 = y0
A2
=
y0
ω
y(t)
=
y0
cosωt
+
y0
ω
sin ωt
位移的多项表达式
位移、速度的单项表达式
3
y(t)
=
y0
cosωt
+
y0
ω
sin ωt
若令
y(t) = a sinϕ cosωt + a cosϕ sin ωt
结构自振周期、频率
6
自振周期的倒数称为工程频率 f = 1
(或频率),记作 f
T
频率 f 表示单位时间内的振动次数,其常用单位