某型无人机的半实物仿真训练系统设计
某型自转旋翼无人机半实物仿真系统
某型自转旋翼无人机半实物仿真系统王德爽;李刚;杨宁【期刊名称】《兵工自动化》【年(卷),期】2014(000)004【摘要】Aiming at the certain type auto-rotating rotor UAV flight control, design a semi-physical simulation system. Introduce the semi-physical simulation system function, constitution, platform overall design, describe system hardware and software design, then carry out system simulation test. The results show that the semi-physical simulation system can actually simulate auto-rotating rotor UAV flight control system operation environment, verify flight control system logic function and quality, can shorten time on researching this type auto-rotating rotor UAV.%针对某型自转旋翼无人机飞行控制,设计一种半实物仿真系统。
介绍半实物仿真系统功能及组成、平台总体设计,详细论述系统硬件、软件设计,并对系统进行仿真试验。
结果表明,该半实物仿真系统能真实地模拟自转旋翼无人机飞行控制系统运行环境,验证飞行控制系统逻辑功能及品质,缩短此型号的自转旋翼无人机研制周期。
【总页数】5页(P22-25,38)【作者】王德爽;李刚;杨宁【作者单位】中国航天空气动力技术研究院第11总体设计部,北京 100074;中国航天空气动力技术研究院第11总体设计部,北京 100074;中国航天空气动力技术研究院第11总体设计部,北京 100074【正文语种】中文【中图分类】TJ86【相关文献】1.十字翼布局无人机半实物仿真系统设计 [J], 都基焱;张振;史巍巍2.基于FlightGear的四旋翼无人机半实物仿真系统 [J], 臧皖晋3.旋翼无人机航迹控制半实物仿真系统设计 [J], 蒋祎;廖俊;陈琪峰4.基于模型的四旋翼无人机半实物仿真平台研究 [J], 袁源5.基于模型的四旋翼无人机半实物仿真平台研究 [J], 袁源因版权原因,仅展示原文概要,查看原文内容请购买。
某无人机飞控系统地面半实物仿真平台设计
某无人机飞控系统地面半实物仿真平台设计鲍泳林【期刊名称】《太赫兹科学与电子信息学报》【年(卷),期】2015(013)006【摘要】无人机(UAV)飞控系统地面半实物仿真平台用于对无人机飞控系统进行相关地面测试.针对某无人机飞行控制系统,提出了一种基于 MATLAB实时工作空间和 VxWorks实时操作系统的地面半实物仿真平台方案.针对无人机小扰动数学模型,构建了地面站上位机、控制器和模型机组成的实时系统闭环回路,对硬件及软件配置进行了说明,并设计了相关控制算法.该试验台可实时监测无人机系统状态,并可实时对模型注入扰动,实现系统在线调参.该半物理仿真平台结构简洁,功能明确,为相关控制律提供了便捷的研究设计手段.%A ground Hardware-in-Loop(HIL) simulation test platform is used to perform ground tests for flight control system of Unmanned Aerial Vehicle(UAV). For the purpose of such tests, a ground HIL simulation platform based on MATLAB Real-time Workspace(RTW) and real-time operating system VxWorks is designed. The mathematic model of the UAV is built, and the closed loop of the real-time system including a master computer, a control computer and a model computer is constructed. Hardware and software configuration, and also flight control laws are discussed. This platform enables the observation of system states in UAV flight process, the injection of disturbance, and online adjusting of parameters. This platform is simple but very functional, and it provides a valid way to test control laws of UAV.【总页数】5页(P903-907)【作者】鲍泳林【作者单位】中国工程物理研究院总体工程研究所,四川绵阳 621999【正文语种】中文【中图分类】TN911.7【相关文献】1.小型无人机飞控系统半实物仿真平台实时性研究 [J], 邓红德;鲍鑫;吴佳楠2.某型无人机地面半实物仿真试验控制台系统设计 [J], 王亮;吴成富3.某无人机飞控系统半实物仿真平台设计 [J], 薛鹏;肖前贵;高艳辉4.某无人机飞控系统地面半实物仿真平台设计 [J], 鲍泳林;5.无人机飞控系统半实物仿真测试平台的设计与实现 [J], 陆文骏因版权原因,仅展示原文概要,查看原文内容请购买。
无人机飞行控制半实物仿真系统设计与实现

ISSN 1002-4956 CN11-2034/T实验技术与管理Experimental Technology and M a n a g e m e n t第38卷第3期202丨年3月Vol.38 N o.3Mar. 2021D O I:10.16791/j.c n k i.s j g.2021.03.031无人机飞行控制半实物仿真系统设计与实现吕永玺,屈晓波,史静平(西北工业大学自动化学院,陕西省飞行控制与仿真技术重点实验室,陕西西安710072 )摘要:为保证无人机飞行试验的安全性,提升无人机飞控系统设计的可靠性,自主研发了无人机飞行控制半实物仿真系统。
结合准确的无人机6自由度非线性数学模型和x P C实时系统模块模拟生成无人机飞行状态信息,根据地面站控制指令、传感器故障模注人指令解算获得不同飞行模式和飞行状态下的舵面偏转量,实现了实时系统闭环反馈控制,并驱动舵面偏转检验控制系统的响应速度。
该系统不仅能验证飞控系统的逻辑性和实时性,而且借助虚拟现实技术和航迹地图显示,具备在线整定控制律参数的功能。
该系统模块化程度高,相关硬件和软件对无人机平台和飞控计算机通用性广,依据多平台实验和多架次试飞的实验流程实用性强,为无人机飞控系统开发提供了切实可行、高效可靠的途径。
关键词:飞行控制;实时系统;虚拟现实;在线调参;故障注人中图分类号:V249文献标识码:A文章编号:1002-4956(2021)03-0153-05Design and realization of hardware-in-the-loop simulationsystem for UAV flight controlLYU Yongxi,〇U Xiaobo,SHI Jingping(S h a a n x i P r o v i n c e K e y L a b o r a t o r y o f Flight Control a n d S i m u lation T e c h n o l o g y, S c h o o l o f A u t o m a t i o n,N o r t h w e s t e r n Polytechnical University, X i'a n 710072, C h i n a)Abstract: T o e n s u r e the safety o f U A V flight test a n d i m p r o v e the reliability o f U A V flight control s y s t e m design,the U A V flight control h a r d w a r e-i n-t h e-l o o p s i m u l a t i o n s y s t e m is i n d e p e n d e n t l y d e v e l o p e d.T h e flight statei n f o r m a t i o n o f U A V is g e n e r a t e d b y c o m b i n i n g the a c c u r a t e 6-D O F n o n l i n e a r m a t h e m a t i c a l m o d e l o f U A V a n dx P C real-time s y s t e m m o d u l e. A c c o r d i n g to the g r o u n d station control c o m m a n d a n d s e n s o r fault m o d e injectionc o m m a n d, the deflection o f the control surfaces u nde r different flight m o d e s a n d flight states c a n b e obtained. T h ec l o s e d-l o o p f e ed b a c k control o f the real-time s y s t e m is realized, a n d the control surfaces are d r i v e n to test ther e s p o n s e s p e e d o f the control s y s t e m. T h e s y s t e m c a n not o n l y verify the logic a n d real-time p e r f o r m a n c e o f theflight control s y s t e m,b u t also h a s the function o f onli n e t u n i n g control l a w p a r a m e t e r s w i t h the h e l p o f virtualreality t e c h n o l o g y a n d track m a p display. T h e s y s t e m h a s a h i g h d e g r e e o f m o d u l a r i z a t i o n, a n d the related h a r d w a r ea n d s o f t w a r e are w i d e l y u s e d for the U A V p l a t f o r m a n d flight control c o m p u t e r.A c c o r d i n g to the e x p e r i m e n t a lp r o c e s s o f m a n y p l a t f o r m e x p e r i m e n t s a n d flight tests, the s y s t e m is practical, efficient a n d reliable for thed e v e l o p m e n t o f U A V flight control s y s t e m.Key words: flight control; real t i m e s y s t e m; virtual reality; o n line p a r a m e t e r a d j u s t m e n t; fault injection随着信息技术的发展和社会需求的增长,无人机 目标侦查与打击[4_5]等领域。
一种用于无人机视觉组合导航测试的半实物仿真系统[发明专利]
![一种用于无人机视觉组合导航测试的半实物仿真系统[发明专利]](https://img.taocdn.com/s3/m/fa81e038a9114431b90d6c85ec3a87c240288ae1.png)
专利名称:一种用于无人机视觉组合导航测试的半实物仿真系统
专利类型:发明专利
发明人:沈英,李非,吴衔誉,黄峰,林忠麟,杨鹏飞,谢钰
申请号:CN202011316484.2
申请日:20201120
公开号:CN112631145B
公开日:
20220517
专利内容由知识产权出版社提供
摘要:本发明涉及一种用于无人机视觉组合导航测试的半实物仿真系统,上位机光照场景设置模块用于控制实验设置系统模拟昼夜光照条件和显示实验场景,运动控制模块用于生成运动和轨迹信息并转换为控制指令,通过总线运动控制器发送给运动模拟系统,以模拟无人机实际飞行中位置及姿态角的变化。
视觉组合导航测试系统用于采集信息并解算无人机模拟运动的实时位置、速度和姿态。
半实物仿真系统通过对比视觉组合导航算法解算的位置、速度和姿态和运动模拟系统输出的位置、速度和姿态,评估待测算法。
本发明提供了真实的光照及场景模拟,精度高,实时性强,能够广泛应用于无人机视觉组合导航测试领域。
申请人:福州大学
地址:350108 福建省福州市闽侯县福州大学城乌龙江北大道2号福州大学
国籍:CN
更多信息请下载全文后查看。
无人机飞控系统半实物仿真测试平台的设计与实现
理和任务设备管理等功能遥它由计算机板尧A/D 与 D/A 板尧信号处理板尧回收板尧卫星定位信号接收 板和机箱组成袁作为测量设备的气压高度传感器 和动压传感器也装在机箱里遥 伺服设备由升降舵 机尧左副翼舵机尧右副翼舵机尧左方向舵机尧右方 向舵机尧风门调节器和风道调节器等七个部件组 成袁为了便于使用与维护袁这七个部件为同一型 号的电动舵机遥 舵机主要由机箱尧电动机尧减速 箱尧电位器尧控制及功放电路等组成遥 当控制信号
圆园19 年第 3 期 第 21 卷 总第 156 期
DOI: 10.12152/j.issn.167ຫໍສະໝຸດ -2868.2019.03.013
巢湖学院学报 允燥怎则灶葬造 of 悦澡葬燥澡怎 University
晕燥援3熏圆园19 灾燥造援21 郧藻灶藻则葬造 杂藻则蚤葬造 晕燥援156
无人机飞控系统半实物仿真测试平台的设计与实现
0 引言 无人机航空电子设备包括机载计算机尧伺服
设备尧机载测量设备尧供电设备和飞机电缆等遥 机 载计算机是通用无人机航空电子系统的核心部 件袁是飞行器的控制与管理核心遥 它不仅完成飞 行器的稳定及控制袁还要把机载电子设备统一管 理和调度袁达到资源共享和信息集成与融合,实现 飞行控制律解算尧飞行控制尧飞行状态采集尧传感 器管理尧导航管理尧飞行状态管理尧无线电链路管
收稿日期院2019-04-10 基金项目院安徽三联学院校级科研项目渊项目编号院KJZD2018003尧KJZD2019002尧KJYB2019003冤 作者简介院陆文骏渊1979-冤袁男袁上海人袁安徽三联学院电子电气工程学院讲师袁主要从事电子信息工程技术研究遥
LU Wen-jun 渊Department of Electronic and Electrical Engineering, Anhui Sanlian University, Hefei Anhui 230601冤 Abstract: Flight control system is the integrated command center and core component of UAV system. Aiming at the problem of poor accuracy and low efficiency in field measurement of parameters of flight control system, com鄄 bined with the configuration of flight attitude angle sensor -vertical gyroscope, hardware -in -the -loop simulation technology and integrated automatic test method are adopted. The hardware-in-the-loop simulation test platform of UAV flight control system is composed of a miniaturized UAV attitude calibration platform with low cost and high precision and test device of controlpiston deflexion angle is designed. The main controller is used instead of the main ground control station of UAV to send remote control instructions directly to the aircraft. By changing the atti鄄 tude of the aircraft, the voltage of control signal, feedback signal and rudder angle are measured, and the compre鄄 hensive performance test of flight control system parameters is realized. The performance test of the platform shows that it can meet the test requirements of angle position, system voltage and controlpiston deflexion angle. Key words: UAV; flight control system; calibration station of flight attitude; test device of controlpiston deflexion angle
基于半实装的无人直升机训练系统实现
2 系统关键技术
2.1 飞行控制软件设计
飞控计算机硬件采用开源飞控Pixhawk 。
Pixhawk 是一款高性能自动驾驶仪,适用于固定翼、多旋翼、直升机、模型汽车、模型船等其他可移动的自动机械平台。
飞控软件采用直升机模型固件Arduino Copter ,该固件可加载到Pixhawk 硬件平台中。
2.1.1 飞行模式调用和增添
为保证训练飞行平台与某型无人直升机的典型
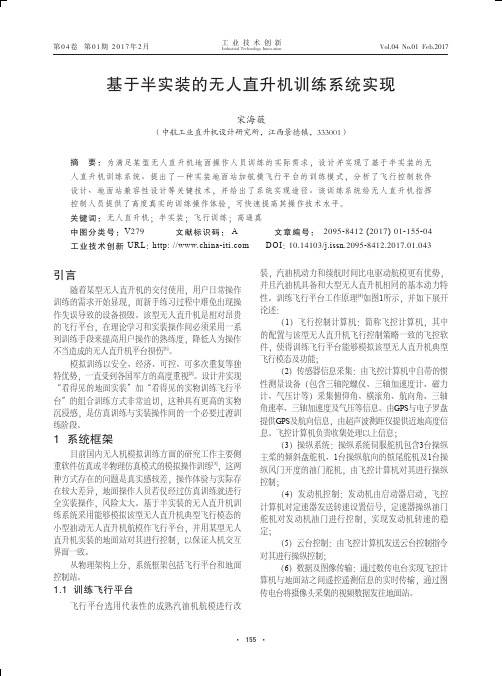
图1 训练飞行平台原理框图
图2 地面控制站原理框图
飞行模态一致,将某型无人直升机飞行控制功能与Arduino Copter 固件飞控功能进行对比,得出需要增加或修改的控制模态有:
(1)增加发动机工作状态控制;(2)增加部分飞行模式; (3)增加复原功能;
(4)以固件中指引模式为基础修改增加航线功能;
(5)以固件中航点任务、游荡模式为基础增加遥调模式;
图3 训练飞行平台硬件
图4 地面控制站
4 结束语
本无人直升机训练系统能够训练指挥控制人员进行起飞、着陆、近场悬停机动、自动航线飞行等基本飞行模态控制操作及图像侦查控制操作。
实装地面站可以在某型无人直升机控制模式和训练控制模式间便捷切换,配合实物训练飞行平台的应用,从操作流程、操作界面及使用视角等各方面给地面指挥控制人员带来完全真实的训练操作体验。
通过该训练系统,可以快速提高无人直升机指挥控制人员的操作技术水平,并可很大程度降低无人直升机损毁造成的经济损失。
参考文献
Realization on Training System for Unmanned Helicopter based Abstract: In。
无人机飞行控制半物理仿真系统设计
无人机飞行控制半物理仿真系统设计
吕旸;万小朋
【期刊名称】《航空工程进展》
【年(卷),期】2011(002)004
【摘要】飞控计算机应用到无人机上之前,需要对其进行较为全面的仿真测试。
本文设计了对飞控计算机进行全面测试的飞行控制半物理仿真系统。
选用RTLinux 作为操作系统,使用MATLAB Simulink建立某型无人机飞控系统仿真模型,采用RTW(Real Time Workshop)工具,自动生成优化的嵌入式实时仿真代码,在线调整模型参数并监视仿真数据。
大量仿真试验表明:该方法能够较大程度地提高仿真代码的效率和可靠性,降低仿真软件的开发工作量,缩短开发周期,提高仿真软件的质量和仿真系统的性能,是一种值得推广的方法。
【总页数】6页(P470-475)
【作者】吕旸;万小朋
【作者单位】西北工业大学航空学院,西安710072;西北工业大学航空学院,西安710072
【正文语种】中文
【中图分类】TP39;V249
【相关文献】
1.分布式飞行控制半物理仿真系统设计 [J], 张晓敏;李俨;赵凯瑞
2.多旋翼无人机飞行控制系统设计研究 [J], 张建学
3.一种基于Qsys的双IP核无人机飞行控制系统设计与实现 [J], 张坤; 毕方鸿; 李克丽; 梁颖; 杨军
4.基于STM32的无人机飞行控制系统设计 [J], 肖远鹏
5.无人机飞行控制半实物仿真系统设计与实现 [J], 吕永玺;屈晓波;史静平
因版权原因,仅展示原文概要,查看原文内容请购买。
某无人机飞控系统半实物仿真平台设计

2012年7月1日第35卷第13期现代电子技术Modern Electronics TechniqueJul.2012Vol.35No.13某无人机飞控系统半实物仿真平台设计薛 鹏,肖前贵,高艳辉(南京航空航天大学自动化学院,江苏南京 210016)摘 要:介绍了某型无人机飞控系统半实物仿真平台的总体功能,阐述了该平台的硬件选型原则、选型方案、基本功能及自制部件的设计过程,对各分系统仿真软件设计框架进行了描述。
最后,通过实际仿真对平台的设计功能进行了验证。
该平台也可用于对无人机飞行品质的仿真评估,以及无人机指挥操控人员的日常模拟训练。
关键词:无人机;飞行控制系统;半实物仿真;传感器仿真中图分类号:TN911.7-34;TP391.9 文献标识码:A 文章编号:1004-373X(2012)13-0111-04Design of hardware-in-the-loop simulation platform for a certain UAV flight control systemXUE Peng,XIAO Qian-gui,GAO Yan-hui(College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)Abstract:The paper introduces a hardware-in-the-loop simulation platform of a certain UAV flight control system,illus-trates the selection principle,the selection scheme and functions of platform hardware and the design procedure of self-madecomponents,and describes framework of sub-system simulation software.Finally,the design functions of platform wereachieved and verified by systematic debugging and simulation.The platform can also be used to assess the UAV flight qualityand simulate the routine training for UAV operators.Keywords:UAV;flight control system;hardware-in-loop simulation;sensor simulation收稿日期:2012-02-220 引 言无人机作为模拟飞机类来袭目标,可为防空武器系统的火控雷达校飞、射击等任务提供空中靶标,是武器系统研制、鉴定过程中必不可少的装备[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
e ce yo e e u p e e c .t si i f inc ft q i m ntta hI mpot tfrt ehih tc nia q pme ota so m n ob ul f c ie e s h i ran o h e h c l ui g e nt r n tr it a ee e tv n s . t
S se sg fs m iph sc lsmu a i n t a n n y t m fUAV e o r f y t m de i n o e - y i a i l to r i i g s s e o a r cat
WANG n — i Ho g xn,L U C a gl n CHEN Ja I h n -i g, a G in,B h a — i AO C u n me
第 1 9卷 第 4期
Vo .9 11 No4 .
电子 设 计 工 程
Elc r n c De in Engn e i g e to i sg i e rn
2 1 年 2月 01
Fe 2 1 b. 01
某型无人机 的 半实物仿真 训练 系统设计
王 宏 新 , 长 亮 ,成 坚 , 传 关 刘 鲍
技 术装 备 形 成 战 斗 力 具 有 重要 意 义 关键 词 :无人 机 :飞行 器 :半 实物 仿 真 :训 练 系统 中 图分 类 号 : P 9 . r 3 19 文 献 标识 码 :A 文 章 编 号 :1 7 — 2 6 加 l )4 0 2 — 4 64 6 3 ( 10 — 0 4o
察 。 实践 证 明 , 助计 算机 控 制和 3 借 D仿 真 技 术 , 解剖 的 实物 相 结 合 , 以使 飞 行 器 内部 的 传 感 器 、 号 流程 、 作 与 可 信 动 执行 以及 飞 行 姿 态 均 可得 到 良好 的展 现 。该 基 于半 实物 的仿 真 训 练 系统 可 大 大提 高装 备 教 学 的 能 力 和 效 率 。 高新 对
( c a oee tia e c igRo m,U pat n , h n Meh nc e h oo yAcd my,Wu a 3 0 5,C ia Me hn —lcr lT a hn c o AV De rme t Wu a c a ia T c n lg l ae h n4 0 7 hn )
( 汉 军械 士 官 学校 无人 机 系 机 电教 研 室 , 北 武 汉 4 07 ) 武 湖 3 0 5 摘要 :针 对 无人 机 飞 行 器 寿命 有 限 , 允许 因训 练 而 过 多使 用 的 问题 , 计 了某 型 无 人 机 半 实 物仿 真训 练 系统 , 无 不 设 对 人机 机 体 内外 构 造 和 内部 设备 进 行 展 示 。 用 飞 行 器 解剖 与 电子技 术仿 真 . 半 实物 的 形 式使 系 统运 行 起 来 . 于观 采 以 便