无人机仿真训练系统
基于虚拟现实技术的无人机飞行模拟系统设计

基于虚拟现实技术的无人机飞行模拟系统设计随着科技的发展,无人机在军事、民用以及科研领域都得到了广泛的应用。
为了提高无人机操作员的训练效果和飞行安全性,基于虚拟现实技术的无人机飞行模拟系统应运而生。
本文将介绍这种系统的设计与应用,以及其所带来的优势。
一、无人机飞行模拟系统的概述无人机飞行模拟系统是一种虚拟现实技术与无人机飞行相关算法相结合的训练系统。
其核心是通过虚拟现实技术模拟真实的无人机飞行场景,提供一个真实感极高的模拟环境,使得操作员能够在没有实际飞行的情况下进行飞行训练。
二、系统设计1. 虚拟现实技术使用虚拟现实技术是无人机飞行模拟系统的关键。
这种技术包括头戴设备、手部追踪器和三维模型等。
头戴设备能够根据操作员的头部动作改变视角,使其感受到真实的飞行场景。
手部追踪器则能够根据操作员的手势控制虚拟无人机的动作。
而三维模型则提供了真实的地形、建筑物和无人机模型,使得操作员可以在模拟环境中进行各种任务的训练。
2. 真实的物理模型无人机飞行模拟系统需要提供真实的物理模型来模拟无人机的飞行动力学。
这需要考虑到气动效应、重力、惯性等多个因素,并将其转化为运动学方程。
通过建立真实的物理模型,操作员可以感受到飞行过程中的各种飞行状态和动作,从而提高其对无人机的操作熟练度和应对飞行异常情况的能力。
3. 多样化的训练场景无人机飞行模拟系统需要提供多样化的训练场景,以满足不同任务需求的训练。
这些场景可以包括不同的地形,如山区、城市和海洋等,不同的天气条件,如晴天、雨天和雾天等,以及不同的任务类型,如侦察、巡航和打击等。
通过在不同场景中进行训练,操作员可以提高其适应不同环境和任务的能力。
三、应用场景基于虚拟现实技术的无人机飞行模拟系统在许多领域有着广泛的应用。
1. 军事训练无人机在军事领域的应用越来越广泛,所以无人机操控员的训练就显得尤为重要。
基于虚拟现实技术的无人机飞行模拟系统可以提供真实的战场环境,使操作员能够在虚拟环境中进行各种训练,如侦察、打击和机动等。
无人机模拟训练视景仿真系统设计与实现

时流畅的渲染速度 。
无人机 的操纵是 一个复 杂的过 程 , 操纵 手有着 很高 的 对 要求 。在无人机模拟训 练 中, 操纵 手需要 在一种 接近 实际 的
被仿真 的环境 中感知周 围环境 , 在很大 程度上 取决 于视景 这 系统提供 的实时视觉反馈来指 导操纵手及时 的控制飞机并 采 取相应 的战术动作 。所 以视景仿真 系统 在模 拟训练 中起到 了 重要 的作用 。本 文提 出 的视 景仿 真 系统 实施 方 案 , 在 P 能 c 机上实现实时仿真 , 以用来进行无人机 的操作训 练。 可
训 练视 景 软 件 采用 V C和 O E G P N L进 行 开 发 , 软件 运 行 在
wn 2平台 , i3 视景驱 动采 用实 时驱 动软 件 V g ea和 O E G P N L支
持, 场景数据库开发工具选 用 Mu ie ra r V g。 lG nCet 和 ea t o
3 1 视景中飞机 的行为模型 .
视景仿真计 算机 — 一视景仿 P, ,F6o T oM p _ 数据 4 GG6oG, o bs ’ l l 『 1 库
设
±
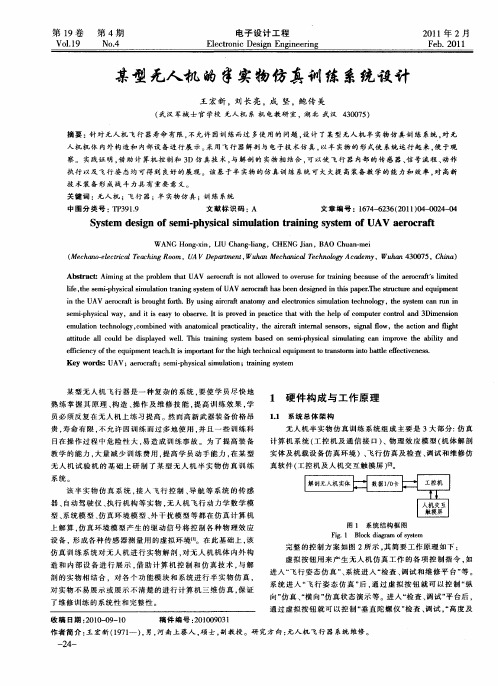
图 1 仿 真 系 统 结 构
1 1 仿 真 系统 结构 .
系统 3个子仿真系统计 算机之 间通过 局域 网传 输数 据。 仿真系统的结构如图 1 示。数学 模型 的仿真任务 是对某 型 所 号无人 机及机载平台建立 运动 学和动力 学数 学模 型 , 仿真 在 时对用户输 入的控制指令 进行仿 真计算 , 到虚 拟飞 机的现
林冬生 , 幸 鲍传关 郑 , (. 1 武汉军械士官学校 无人机 系, 湖北 武汉 4 0 7 ; 2 解放 军炮兵学院 5系, 30 5 . 安徽 合肥 20 3 ) 30 1
无人机操纵训练仿真系统
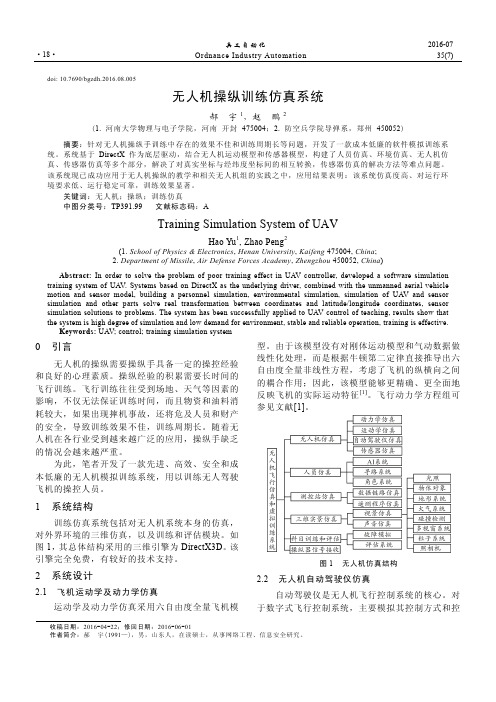
兵工自动化 2016-07Ordnance Industry Automation 35(7) ·18·doi: 10.7690/bgzdh.2016.08.005无人机操纵训练仿真系统郝宇1,赵鹏2(1. 河南大学物理与电子学院,河南开封 475004;2. 防空兵学院导弹系,郑州 450052)摘要:针对无人机操纵手训练中存在的效果不佳和训练周期长等问题,开发了一款成本低廉的软件模拟训练系统。
系统基于DirectX作为底层驱动,结合无人机运动模型和传感器模型,构建了人员仿真、环境仿真、无人机仿真、传感器仿真等多个部分,解决了对真实坐标与经纬度坐标间的相互转换,传感器仿真的解决方法等难点问题。
该系统现已成功应用于无人机操纵的教学和相关无人机组的实践之中,应用结果表明:该系统仿真度高、对运行环境要求低、运行稳定可靠,训练效果显著。
关键词:无人机;操纵;训练仿真中图分类号:TP391.99 文献标志码:ATraining Simulation System of UAVHao Yu1, Zhao Peng2(1. School of Physics & Electronics, Henan University, Kaifeng 475004, China;2. Department of Missile, Air Defense Forces Academy, Zhengzhou 450052, China)Abstract: In order to solve the problem of poor training effect in UAV controller, developed a software simulation training system of UAV. Systems based on DirectX as the underlying driver, combined with the unmanned aerial vehicle motion and sensor model, building a personnel simulation, environmental simulation, simulation of UAV and sensor simulation and other parts solve real transformation between coordinates and latitude/longitude coordinates, sensor simulation solutions to problems. The system has been successfully applied to UAV control of teaching, results show that the system is high degree of simulation and low demand for environment, stable and reliable operation, training is effective.Keywords: UAV; control; training simulation system0 引言无人机的操纵需要操纵手具备一定的操控经验和良好的心理素质。
某型无人机的半实物仿真训练系统设计
基于虚拟建模的无人机维修训练系统研究
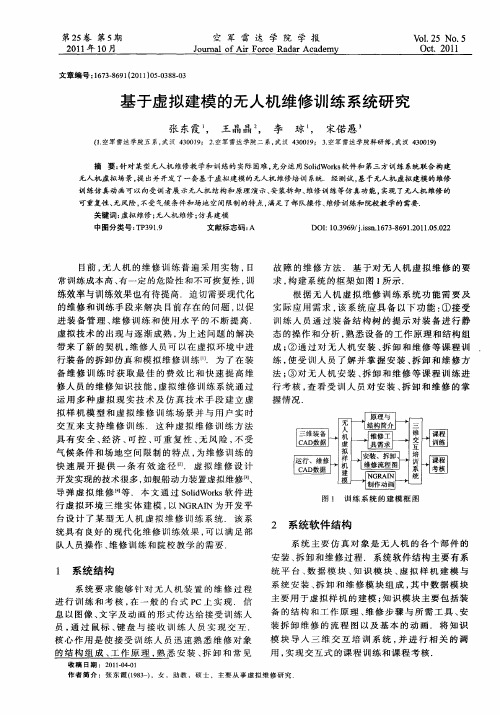
法 ; 对 无 人 机 安装 、 卸 和维 修 等 课 程 训 练 进 ③ 拆 行 考 核 , 看受 训 人 员 对 安 装 、 卸 和维 修 的掌 查 拆
进 装 备 管 理 、 修 训 练 和 使用 水 平 的不 断 提 高 . 维 虚 拟技 术 的出现 与 逐渐 成 熟 , 为上述 问题 的解 决 带 来 了新 的契机 , 维修 人 员可 以在虚 拟 环境 中进
根 据无 人 机 虚 拟 维修 训 练 系统 功 能需 要 及
实 际应 用 需 求 , 系 统 应 具 备 以 下 功 能 : 接 受 该 ① 训 练 人 员 通 过 装 备 结 构 树 的 提示 对 装 备 进 行 静
关键 词 : 拟维修 ; 虚 无人机 维修 ; 真 建模 仿 中图分 类号 : P 9 . T 31 9 文 献标 志码 : A D I 1. 6/.s. 7.6 1 0 1 5 2 O :03 9 {sn1 389 . 1. . 2 9 i 6 2 00
目前 , 无人 机 的维 修 训 练 普遍 采 用实 物 , 日
2 系统软件 结构
系统 主要 仿 真对 象 是 无 人 机 的 各个 部 件 的
安装 、 卸 和维 修过 程 . 系统 软件 结 构 主要 有 系 拆
1 系统 结 构
系 统 要 求 能 够 针 对 无 人 机 装 置 的 维 修 过 程
统 平 台 、 据 模 块 、 识 模 块 、 拟 样 机 建 模 与 数 知 虚
训 练仿 真 动 画可 以向 受训 者展 示 无人 机 结构 和 原理 演 示 、 安装 拆 卸 、 维修 训 练 等仿 真 功 能 , 实现 了无人 机 维修 的 可 重复性 、 无风 险 , 不受 气候 条件 和场 地 空间 限制 的特 点 , 满足 了部 队操 作 、 维修 训 练和 院校教 学的 需要 .
基于虚拟现实技术的无人机模拟训练系统设计
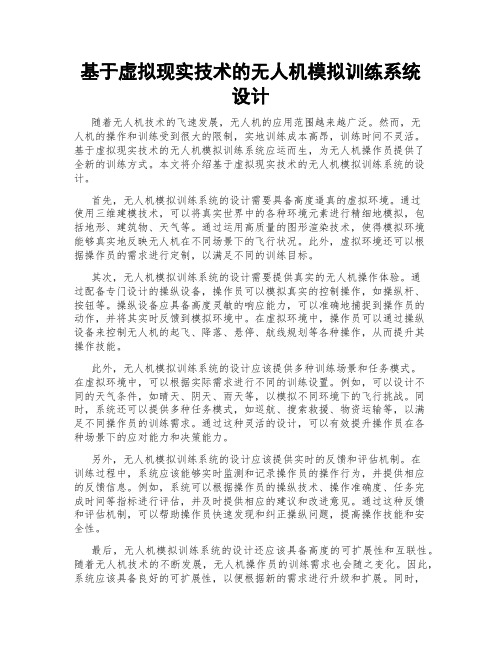
基于虚拟现实技术的无人机模拟训练系统设计随着无人机技术的飞速发展,无人机的应用范围越来越广泛。
然而,无人机的操作和训练受到很大的限制,实地训练成本高昂,训练时间不灵活。
基于虚拟现实技术的无人机模拟训练系统应运而生,为无人机操作员提供了全新的训练方式。
本文将介绍基于虚拟现实技术的无人机模拟训练系统的设计。
首先,无人机模拟训练系统的设计需要具备高度逼真的虚拟环境。
通过使用三维建模技术,可以将真实世界中的各种环境元素进行精细地模拟,包括地形、建筑物、天气等。
通过运用高质量的图形渲染技术,使得模拟环境能够真实地反映无人机在不同场景下的飞行状况。
此外,虚拟环境还可以根据操作员的需求进行定制,以满足不同的训练目标。
其次,无人机模拟训练系统的设计需要提供真实的无人机操作体验。
通过配备专门设计的操纵设备,操作员可以模拟真实的控制操作,如操纵杆、按钮等。
操纵设备应具备高度灵敏的响应能力,可以准确地捕捉到操作员的动作,并将其实时反馈到模拟环境中。
在虚拟环境中,操作员可以通过操纵设备来控制无人机的起飞、降落、悬停、航线规划等各种操作,从而提升其操作技能。
此外,无人机模拟训练系统的设计应该提供多种训练场景和任务模式。
在虚拟环境中,可以根据实际需求进行不同的训练设置。
例如,可以设计不同的天气条件,如晴天、阴天、雨天等,以模拟不同环境下的飞行挑战。
同时,系统还可以提供多种任务模式,如巡航、搜索救援、物资运输等,以满足不同操作员的训练需求。
通过这种灵活的设计,可以有效提升操作员在各种场景下的应对能力和决策能力。
另外,无人机模拟训练系统的设计应该提供实时的反馈和评估机制。
在训练过程中,系统应该能够实时监测和记录操作员的操作行为,并提供相应的反馈信息。
例如,系统可以根据操作员的操纵技术、操作准确度、任务完成时间等指标进行评估,并及时提供相应的建议和改进意见。
通过这种反馈和评估机制,可以帮助操作员快速发现和纠正操纵问题,提高操作技能和安全性。
基于虚拟现实技术的电力无人机巡检仿真培训系统研究与实现
基于虚拟现实技术的电力无人机巡检仿真培训系统研究与实现发表时间:2018-10-18T10:00:11.917Z 来源:《电力设备》2018年第18期作者:王鹏黄成云李军锋[导读] 摘要:针对以往的无人机仿真培训系统无法满足输电线路无人机巡检的具体应用,往往存在针对性弱、真实感低,交互性差等缺点。
(广东电网有限责任公司教育培训评价中心广东省广州市 510520)摘要:针对以往的无人机仿真培训系统无法满足输电线路无人机巡检的具体应用,往往存在针对性弱、真实感低,交互性差等缺点。
本文旨在介绍一个能够友好应用于无人机输电线路巡检的仿真系统设计与实现方案,该方案将无人机飞行仿真技术、计算机图形图像技术、大规模建模技术深度融合,使该系统不仅能够逼真的模拟真实无人机的操控及交互,而且能够在基于真实地理信息环境的虚拟场景中交互。
经过实际应用,基于该系统能够有效提升无人机线路巡视的仿真演练质量和技能考核水平,对于电力行业员工掌握无人机操控技能,开展线路巡检应用具有重要意义。
关键词:无人机;线路巡检;仿真培训;Research and Implementation of UA V Used in Power Line Simulation Training System Based on Virtual Reality Wang Peng Kang Li-juan Li Jun-feng(Education Training Evaluation Center of Guangdong Power Grid Co.,LTD,Guangzhou 510520,Guangdong,China) Abstract:For the disadvantages of poor pertinence、authenticity and interactivity,the previous unmanned aerial vehicles(UA Vs)simulation training system cannot fulfill the practical application of transmission line inspection using UA V.This paper presents a system which could be used in transmission line inspection.This system deeply combine the technology of UA V flight simulation,computer graphics and image,large scale modeling.The system can not only simulate the manipulation and interaction of the real UA V,but also can interact with the virtual scene based on the real geographic information environment.Through the practical application,the system can effectively improve the quality of the simulation drill and the level of skills assessment of transmission line inspection using UA V.It has important significance to transmission line inspection using UA V. KEY WORDS:UA V;transmission line inspection;simulation training1.引言由于机体材料技术、飞行控制技术、无线通信遥控技术以及飞行云台图传处理技术的快速发展,无人直升机(简称无人机)呈现出体积小、质量轻、便于携带和制造、使用成本低、操作性和灵活性等特点。
无人机虚拟仿真三维交互控制模型的设计与实现

无人机虚拟仿真三维交互控制模型的设计与实现摘要:介绍了如何利用Pro/E、3DS MAX及Cult 3D软件设计制作无人机虚拟仿真三维交互控制模型,实现无人机的精确建模、动态模拟和交互控制。
关键词:无人机操作训练虚拟仿真Pro/E 3DS MAX Cult 3D长期以来,无人机装备的操作训练一般依赖于实装开展,受到场地、人员、装备维护保养的限制,具有效率低、代价高、训练内容片面的弊端。
利用虚拟仿真训练系统进行无人机操作训练,能够有效克服实装训练中存在的问题,且经济、智能、可重用,具有广阔的应用前景。
无人机虚拟仿真三维交互模型作为用户训练中的直接操作对象,对整个虚拟仿真训练系统起着至关重要的作用,必须具备逼真的外观形象和强大的交互功能,其设计实现涉及到计算机仿真与虚拟现实的相关技术和结合机制问题。
采用Pro/E、3DS MAX及Cult 3D软件相结合的形式,利用三者之间的兼容性进行优势互补,是解决上述问题的有效途径[1-3]。
在分别运用Pro/E和3DS MAX对无人机实现精确建模和动画模拟的基础上,借助Cult 3D进一步实现模型的交互功能,能够有效确保无人机虚拟仿真三维交互模型的逼真度、沉浸感和可控性,对提高无人机虚拟仿真训练系统的训练实效具有重要意义。
1 无人机三维实体模型的建立由于Cult 3D本身没有仿真建模功能,3DS MAX难以实现精确三维建模,故无人机三维实体仿真模型需借助Pro/E软件来建立[5]。
Pro/E是美国PIE公司推出的一款CAD/CAM/CAE集成解决方案,是目前应用最为广泛的工业仿真设计软件之一。
它采用设置特征参数的建模方式,使用参数来描述零部件的形状、尺寸和属性,所建三维模型的精度较高。
图1所示为基于Pro/E软件建立的无人机某零件三维模型。
考虑到在无人机操作训练中,涉及大量的零部件的拆卸组装以及配合运动过程,无人机三维实体模型的建立采用拼接法,即先建立各个零部件的独立模型,再组装成整体,具体过程为:首先,对无人机所含零部件进行数量统计和尺寸测量,并予以标识;其次,根据统计数据和测量参数,使用Pro/MOLDESIGN模块创建各个零部件的三维模型,并予以修改和完善。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 − sin l × sin λ cos l cos l × sin λ sin l
cos λ
xe y e ze
(6)
上述(6)式中 xe , ye , ze 为地心坐标系下的坐标, xd , yd , zd 为转换后的当地地理坐标系 下的坐标,公式(6)完成了从地心坐标向地理坐标的转换 。 2.3.2 侦察图像的仿真 利用三维几何建模的方法生成原始的地形几何数据库及地表纹理特征,在此基础上迭 加静止人文目标(如桥梁、建筑物)和运动目标(如车辆)以及云、雾等天气特征,由此 构成基本的场景数据库。然后根据上面描述得到的视点变换参数实时计算可见的二维透视 图,仿真相机在此时间点拍摄的照片。本系统采用了图像及融合处理的方法对图像进行处 理,实现了模拟摄像镜头的调焦过程。本系统采用了LOD技术对景物进行简化,在不影响画 面视觉效果的前提条件下,可以通过逐次简化景物的表面细节来减少场景的几何复杂性, 从而提高绘制算法的效率。将每个模型均保留了一定层次的细节,当从近处观察物体时, 我们采用精细模型,而当从远处观察物体时则采用较为粗糙的模型。同时,在两个相邻层 次模型之间形成光滑的视觉过渡,即几何形状过渡,以避免视点连续地变化时两个不同层
cos γtgϕ − sin γ cos γ / cos ϕ
(5)
该飞机系统仿真模型主要包括遥控和程控两种主要控制方式。遥控飞行仿真是利用计 算机控制台发出信号模拟主测控站或机动测控站发出的信号进行操纵无人机的仿真模拟, 通过对无人机的飞行特性及飞控系统的建模在计算机上实现无人机的仿真操纵飞行。程控 飞行仿真是使无人机按照预先规划的轨迹进行飞行,包括自主完成预先确定的航路和规划 的任务,并按确定的使命、原则在飞行中进行决策并自主执行任务。 2.2 地面指挥控制及数据链路仿真 2.2.1 地面指挥控制 地面指挥控制站的主要功能包括任务规划、飞行监视与控制、图像显示与载荷控制、 数据记录与通讯、系统监控与链路控制等。为让使用者有逼真的感觉,达到仿真训练的目 的,在地面指挥控制部分采用实物仿真。 2.2.2 天地数据链路仿真
V = iU + jV + kW
角速度为:
(1)
ϖ = iP + jQ + kR
对于质量 m 的飞机有如下动力学方程 :
[4]
(2)
& − VR + WQ) = F m(U x & m(V + UR − WP) = Fy m(W & − UQ + VP) = F z
(3)
77
其中: Fx,Fy,Fz 分别为三个坐标轴上的合力。
[7]
参考文献
1 朱纪洪,夏云程,郭锁凤. 基于GPS某无人飞机的导航与制导算法,弹道学报,Vol.10 ,No.1,1998 年3月. 2 王行仁主编.飞行实时仿真系统及技术,北京航空航天大学出版社,1998. 3 张明廉.飞行控制系统 [M].北京: 国防工业出版社,1984.36~40. 4 长航时无人侦察飞机训练模拟器技术方案.北京航空航天大学内部资料,2000年9月. 5 康凤举主编.现代仿真技术与应用,北京:国防工业出版社,2001年. 6 以光衢等编.惯性导航原理,北京:航空工业出版社,1987. 7 张国宣,韦穗, 《虚拟现实中的LOD技术》 , 《微机发展》 ,2001,No.1.13~15.
79
相机相对于基准 平台的运动数据
坐标 变换
得到相对于景物 空间下视向量
相机本体运动 (如焦距)
视口参数
视点变换矩阵
图像实时生成 任务/控制计算机 或机载数据终端
图4 任务设备执行动作仿真
坐标变换依照1964年国际天文学会通过的参考椭球体 ,设某点的经度l,纬度为b, 高程为h,则有
[5]
x d − sin λ y = − sin l × cos λ d zd cos l × cos λ
飞 机 飞 行 指 令 天地数据链路仿真模型
[3]
飞机系统仿真模型 飞机位置、姿态数据 侦察平台控制 运动仿真模型 侦察设备 仿真模型
地 面 指 挥 控 制 站
平台运动控制指令 侦察设备运动、工作状态控制指令 三维图像实 时生成系统 图像输出 图像传输驱动
图1 设飞机的速度为:
无人机仿真训练系统仿真原理框图
无人机仿真训练系统
孙丽卿 王行仁 张国峰
北京 100083)
(北京航空航天大学先进仿真技术航空科技重点实验室
摘 要
为了满足无人机地面操纵人员的训练需求,本文以某新型无人机为应用背景提出了
“无人机仿真训练系统”的体系结构,对其中的模块及其关键技术进行了阐述。对于训练操 纵人员,该“无人机仿真训练系统”是一种缩短培训周期,减少费用,更为先进的训练方法。 关键词 无人机 仿真 训练
81
1 引言 无人驾驶飞机在机体、发动机、燃料消耗、操纵训练、后勤和维修等费用方面要比有 人驾驶飞机低得多,并以其尺寸小、机动性大而获得较强的战场适应性与生存力,尤其是在 执行侦察与信息搜集,探测与攻击敌方雷达等军事任务方面显得特别有利,利用机载电视、 红外热像仪、合成孔径雷达可以获取实时的战地情报 。由于无人驾驶飞机具有上述诸多 优点,因此在现代战争中,无人机的作用日益受到人们的重视,各国竞相研制。 由于无人驾驶飞机的操纵是一个比较复杂的过程,对操纵人员有比较高的要求,因而 研制训练模拟器,让操纵人员进行模拟训练,既可以节省费用,又可以避免由于操纵 不熟练而造成无人驾驶飞机的不必要的损失。 系统仿真技术是以相似理论、控制理论、计算机技术、信息技术及其应用领域的专业 技术为基础,以计算机和各种物理效应设备为工具,利用系统模型对实际的或设想的系统 进行动态试验研究的一门综合性技术 。随着仿真技术的逐步发展,仿真已经从刚刚开始 时仅仅作为研究设计的一种试验手段,逐步发展为各类型仿真系统互联,人可以参与交互 作用的一种综合环境。 仿真技术应用于无人驾驶飞机进行飞行训练也成了仿真技术发展的必然。基于系统仿 真技术我们开发了无人机仿真训练系统。 2 总体结构 如图 1 所示为无人机仿真训练系统仿真原理框图。包括地面指挥控制仿真、天地数据 链路仿真、飞机系统仿真和任务载荷部分(包括侦察平台、侦察设备及侦察图像等)的仿 真。来自于地面指挥控制站的飞行遥控指令(包括航线、航点的装订,自主控制与操纵杆 控制的切换等) ,经天地数据链路仿真模型传入飞机系统仿真模型,经解算计算出飞机的实
& − PR) & = M + ( I − I )QR + I (Q I xx P x yy zz xy & = M + ( I − I ) PR + I ( P & + QR) I yy Q y zz xx xy 2 2 I R & zz = M z + ( I xx − I yy )QP + I xy ( P − Q )
其中: M x,M y,M z 分别为三个坐标轴上的总力矩。
(4)
根据总的合力和力矩可以得到加速度和角加速度,从而得到速度和角速度,从下式可 以得到相应的姿态角:
sin γtgϕ γ& 1 ϕ & cos γ = 0 & θ 0 sin γ / cos ϕ
[6]
80
次的模型间产生明显的跳跃 。这样,计算机在生成场景时,根据该物体所在位置与视点 间的远近关系不同,分别使用不同精细程度的模型,避免了不必要的计算,既能节约时间 又不会降低场景的逼真度,使计算的效率大大提高。 3 结论 本无人机仿真训练系统在飞机动力学仿真中采用六自由度全量非线性方程, 精确全面 地反映飞机的实际运动特性。任务载荷部分仿真中精确模拟侦察任务设备的各种动作,将 生成的数据实时的传给图像生成系统, 利用LOD技术在不影响画面视觉效果的前提条件下, 对场景的几何复杂性进行简化,从而提高了计算效率。 本无人机仿真训练系统与新型无人机一同投入使用,它能够训练操纵手进行起飞、着 陆及按航路点飞行,并实时显示三维动画图形,由于采用数学仿真与实物仿真相结合的方 法,给人以更加逼真、直观、舒适的感觉,操纵手可以在地面反复进行虚拟操纵训练,以 达到熟练操纵的目的,为实际操纵无人机打下坚实的基础。
光缆 光 端 机 光 端 机 天 地 数 据 遥控 链 路 仿 遥测 遥 真 测 模 型
地 遥 光 面 控 端 指 机 挥 控 光 制 端 站 机
飞机 位置和姿态 指令 平台姿态 侦察任务平台 输出 (图像信息)
图 2 地面指挥控制站与天地数据链路仿真
图 3 任务载荷输入输出框图
78
在无人机仿真训练系统中用一台天地数据链(测控与信息传输系统)仿真计算机模拟 无人机和地面指挥控制站之间的测控与信息传输功能。需要传输的信息包括遥控信息、遥 测信息及图像信息。 如图 2 所示, 天地数据链路仿真计算机通过 RS-422 异步串行通讯接口与地面指挥控制 站的非计算机设备相连。 遥控和遥测信息采用 PCM 编码体制,为减少误码率,增加传输可靠性,遥控指令采用 每帧重发三遍,接收端以“三判二”的方式进行接发。图像编码采用 MPEG 图像压缩方法对 侦察设备输出图像的数据进行压缩。 2.3 任务载荷 如图3所示为任务载荷输入输出框图,任务载荷部分是无人机搭载的侦察设备,是地面 使用人员操纵、控制主要的关键部分之一。因此,该部分的功能仿真对于本训练系统来说 是十分重要的。 任务载荷采用数学仿真,主要包括两部分,一是任务设备各类执行动作的仿真,如平 台调姿、相机镜头方位调整、相机焦距调整、目标锁定等;二是侦察数据的仿真,如侦察 设备拍摄的可见光图像、红外图像等。同时二者在系统运行过程中又不是孤立的,而是相 互关联的。任务设备执行某个动作后,将实时地影响侦察数据的输出,比如调整相机姿态 时,由相机获得的照片将会实时的发生变化。 2.3.1任务设备执行动作仿真 任务设备各类动作的模拟将通过控制三维成像透视投影中的位置和姿态以及水平、垂 直视场角的方法来实现。仿真的具体过程可描述如图4。