图像处理之逆透视变换 (1)
逆透视转换——精选推荐

逆透视转换逆透视转换(unpivoting)是⼀种把数据从列的状态旋转为⾏的状态的技术。
通常,它涉及查询数据的透视状态,将来⾃单个记录中多个列的值扩展为单个列中具有相同值的多个记录。
换句话说,把透视表中的每个源⾏潜在地转换成多个⾏,每⾏代表源透视表的⼀个指定的列值。
使⽤标准SQL 进⾏逆透视转换逆透视转换的标准要SQL解决⽅案⾮常明确地要实现3个逻辑处理阶段:⽣成副本、提取元素和删除不相关的交叉。
解决⽅案的第⼀步是根据来源表的每⼀⾏⽣成多个副本(为需要逆透视的每个列⽣成⼀个副本)。
SELECT *FROM (SELECT empid,custid, CASE custid WHEN 'A' THEN A WHEN 'B' THEN B END AS qty FROM dbo.EmpCustOrders CROSS JOIN (VALUES('A‘),('B')) AS Custs(custid) AS DWHERE qty IS NOT NULL ;使⽤ T-SQL 的UNPIVOT 运算符进⾏逆透视转换对数据进⾏逆透视转换时,会为源表中想要进⾏逆透视的任意列⽣成两个结果列。
与PIVOT 运算符类似。
UNPIVOT 也是作为表运算符,在FROM ⼦句的上下⽂中执⾏操作。
它的操作对象是源表或表表达式。
在UNPIVOT 去处符的圆括号中需要指定的内容包括:⽤于保存源表列值的⽬标列名,以及源表的列名列表。
在UNPIVOT 运算符的圆括号的后⾯,可以为表运算符的结果表提供⼀个别名。
\select col1,col2,col3from (select 'a' as col1,'2' as b,'3' as c ) as tunpivot (col3 for col2 in (b,c)) as unp注意:UNPIVOT 运算符会执⾏与前⾯介绍的逻辑处理阶段相同的⼏个步骤:⽣成副本、提取元素和删除交叉位置上的NULL值。
ipm特征空间转换方法

ipm特征空间转换方法
IPM(逆透视映射)是一种用于消除透视效应的变换方法,也称为逆透视。
其核心思想是将一个平面投影到另一个平面,从而消除透视效应。
IPM特征空间转换方法的基本步骤如下:
1. 确定输入和输出平面:选择要进行投影变换的输入平面和输出平面,通常是地图或传感器图像平面。
2. 确定投影变换参数:使用至少四个对应点对,不能有三点及以上共线,不需要知道摄相机参数或者平面位置的任何信息。
通过求解透视变换矩阵,可以确定投影变换参数。
3. 进行投影变换:利用确定的投影变换参数,将输入平面的图像投影到输出平面。
这一步可以使用仿射变换或者单应性变换来实现。
4. 特征提取:在输出平面上提取图像特征,包括边缘、角点、纹理等。
这些特征可以用于识别、匹配等任务。
5. 匹配与识别:将提取的特征与已知特征进行匹配和识别,以实现目标检测、跟踪、识别等功能。
IPM特征空间转换方法具有简单、快速、适用于复杂场景等优点,广泛应用于智能交通、自动驾驶、机器人等领域。
逆透视变换IPM模型

逆透视变换IPM模型公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。
本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。
在解释自适应的IPM模型之前,首先需要了解使用相机的物理参数来描述IPM的基本模型[1](这篇文章虽然有点古老,但是从数学层面上阐述了IPM的数学模型)下图展示了相机坐标系,图像坐标系,以及世界坐标系之间的关系,其中(u,v)是像素单位,(r,c)和(X,Y,Z)是米制单位。
使用IPM的目的是将像素点(u,v)映射到世界坐标系下的(X,Y,Z),首先定义一个单位向量X'来表示相机的视角的方向(这里用“' ”来表示这是一个矢量)那么与X'正交的就是单位向量Y",该向量是与地面和相机的视角的方向都是正交的关系,IPM就是寻找到世界坐标系下的(X',Y',Z')与图像坐标系(u',v')之间的关系,以便将图像的像素映射到世界坐标系下。
这里一定要注意根据单位的不同的,图像上的两种坐标系设置为(u',v')和(r',c').像素空间中的图像点(u',v')与米制单位空间中的(r',c')是相同点。
他们之间的关系定义如下:这里说明一下K是像素与米单位之间的关系(Px/m),其实就是每米占多少个pixel.图像的宽度m,以及图像的高度n。
相机的光学中心P在世界坐标系中的位置为(0,0,h)。
光学中心的轴用O'表示,是与像平面是正交的(这里可以想象一下,肯定是正交的关系)。
我们近一步的通过下面的侧视图和俯视图的描述参数中,假设物体的高度为0,那么很容易的计算出世界坐标系中的投影图像,使用侧视图理解,X'方向上的点X可以写成像素点v,相机的倾斜角(t het a0)和垂直角(t het a)的函数。
自适应逆透视变换(ipm)算法
自适应逆透视变换(IPM)算法自适应逆透视变换(IPM)算法作为计算机视觉和图像处理领域的重要技术,近年来备受关注。
它是一种能够校正图像透视失真、实现几何校正的算法,对于实时道路检测、智能驾驶等领域具有重要意义。
本文将从IPM算法的原理、实现和应用等方面进行全面探讨,希望能帮助读者深入理解并掌握这一重要的技术。
一、IPM算法原理简介IPM算法是一种通过对图像进行逆透视变换,将图像中的平行线转化为平行线,从而校正图像透视失真的算法。
它主要包括摄像机标定、透视转换和透视矩阵计算等步骤。
在摄像机标定过程中,需要确定摄像机的内参和外参,以便后续的透视转换。
透视转换则是通过透视矩阵将原始图像中的像素映射到校正后的图像中,实现透视校正的效果。
透视矩阵的计算则是通过对摄像机的内参和外参进行运算得到,包括了相机矩阵、旋转矩阵和平移矩阵等。
通过这些步骤,IPM算法能够有效地校正图像的透视失真,提高图像的几何质量和视觉效果。
二、IPM算法实现与优化在实际应用中,IPM算法需要考虑图像质量、处理速度和算法稳定性等方面的问题。
为了实现高质量的透视校正,需要对摄像机进行精确的标定,以提供准确的内参和外参参数。
在透视转换的过程中,需要考虑到图像的畸变问题,对图像进行去畸变处理,以获得更准确的透视校正效果。
另外,为了提高算法的处理速度,可以采用GPU加速、多线程并行处理等技术,以实现实时的透视校正效果。
对于算法的稳定性和鲁棒性也需要进行充分的考虑,避免图像噪声、光照变化等因素对算法的影响,以提高算法的适用性和稳定性。
三、IPM算法在智能驾驶中的应用随着智能驾驶技术的发展,IPM算法在这一领域的应用也变得越来越重要。
通过IPM算法可以实现对车辆周围环境的实时监测和分析,包括道路标识的识别、车道线的检测等。
通过逆透视变换,可以将车载摄像头捕获的图像校正为鸟瞰图,提供更直观、更清晰的道路信息。
这对于提高自动驾驶系统的环境感知能力、实现智能驾驶和车辆自主导航具有重要意义。
ipm逆透射变换 python代码
IPM逆透射变换介绍IPM(Inverse Perspective Mapping)逆透射变换是一种在计算机视觉中常用的技术,用于将车辆驾驶员视角下的图像转换为鸟瞰图。
通过逆透射变换,可以更好地理解场景并进行车辆控制、目标检测等任务。
本文将介绍IPM逆透射变换的原理和实现方法,以及如何使用Python代码实现。
原理逆透射变换的原理是通过将视角下的图像映射到鸟瞰图上,从而消除透视畸变。
透视畸变是由于相机与物体之间的距离不同而导致的图像形变现象。
通过将图像进行逆透射变换,可以将图像中的平行线变为平行线,从而更好地理解场景。
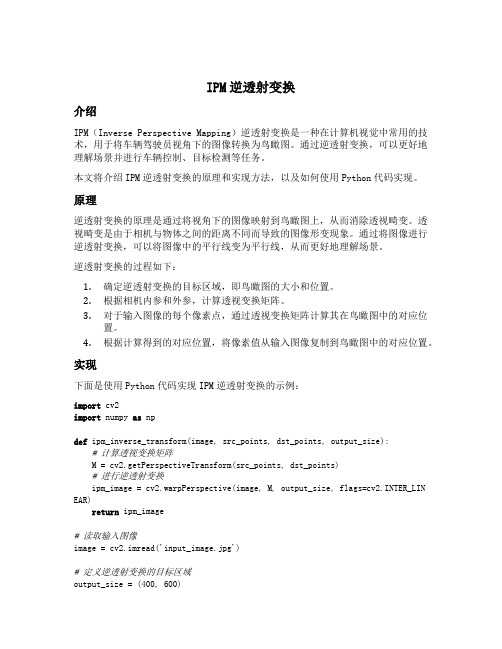
逆透射变换的过程如下:1.确定逆透射变换的目标区域,即鸟瞰图的大小和位置。
2.根据相机内参和外参,计算透视变换矩阵。
3.对于输入图像的每个像素点,通过透视变换矩阵计算其在鸟瞰图中的对应位置。
4.根据计算得到的对应位置,将像素值从输入图像复制到鸟瞰图中的对应位置。
实现下面是使用Python代码实现IPM逆透射变换的示例:import cv2import numpy as npdef ipm_inverse_transform(image, src_points, dst_points, output_size): # 计算透视变换矩阵M = cv2.getPerspectiveTransform(src_points, dst_points)# 进行逆透射变换ipm_image = cv2.warpPerspective(image, M, output_size, flags=cv2.INTER_LIN EAR)return ipm_image# 读取输入图像image = cv2.imread('input_image.jpg')# 定义逆透射变换的目标区域output_size = (400, 600)dst_points = np.float32([[0, 0], [output_size[0], 0], [output_size[0], output_ size[1]], [0, output_size[1]]])# 定义视角下的四个点src_points = np.float32([[100, 200], [500, 200], [700, 400], [0, 400]])# 进行逆透射变换ipm_image = ipm_inverse_transform(image, src_points, dst_points, output_size)# 显示结果cv2.imshow('Input Image', image)cv2.imshow('IPM Image', ipm_image)cv2.waitKey(0)cv2.destroyAllWindows()在上述代码中,首先通过cv2.getPerspectiveTransform()函数计算透视变换矩阵M,然后使用cv2.warpPerspective()函数进行逆透射变换,得到鸟瞰图ipm_image。
python车道线逆透视变换

Python 车道线逆透视变换一、概述车道线检测是自动驾驶技术中的重要一环,通过对车道线的检测可以帮助自动驾驶车辆保持在正确的车道行驶,提高行驶的安全性和稳定性。
逆透视变换是一种常用的图像处理技术,可以对图像进行修正和校正,使得车道线的检测更加准确和可靠。
本文将介绍如何使用Python进行车道线的逆透视变换。
二、透视变换简介透视变换是一种将平面上的图像投影到另一个平面上的变换方法。
在车道线检测中,透视变换常常被用来将道路的图像投影到一个新的视角下,从而可以更好地检测车道线的位置和形状。
逆透视变换则是透视变换的逆过程,可以将投影过的图像恢复到原始的视角下。
三、逆透视变换的原理逆透视变换的原理是通过寻找透视变换的逆变换矩阵来实现的。
逆变换矩阵可以将投影到新平面上的图像恢复到原始平面上。
在实际应用中,可以使用OpenCV库提供的函数来计算逆变换矩阵,并对图像进行逆透视变换。
四、使用Python进行逆透视变换的步骤1. 导入所需的库在进行逆透视变换之前,首先需要导入所需的库,包括NumPy、OpenCV和Matplotlib等。
这些库可以帮助我们完成图像的处理和显示。
2. 读取图像使用OpenCV库的函数读取待处理的图像文件,并将其转换为灰度图像。
灰度图像可以减少计算量,加快处理速度。
3. 计算逆变换矩阵使用OpenCV库的函数计算逆变换矩阵,该矩阵可以将投影到新平面上的图像投影恢复到原始平面。
通过实验和调整参数,可以找到最合适的逆变换矩阵。
4. 对图像进行逆透视变换使用OpenCV库的函数对图像进行逆透视变换,将投影到新平面上的图像恢复到原始平面上。
通过逆透视变换,可以更加清晰地显示车道线的位置和形状。
5. 显示处理结果使用Matplotlib库的函数将处理后的图像显示出来,可以直观地观察逆透视变换的效果。
通过调整参数和算法,可以得到更加准确和可靠的车道线检测结果。
五、结论逆透视变换是一种常用的图像处理技术,可以帮助我们更加准确地检测车道线的位置和形状。
逆透视变换ipm原理

逆透视变换ipm原理
逆透视变换(Inverse Perspective Mapping,简称IPM)是一种用于纠正图像中的透视畸变的技术。
在摄影学中,透视畸变是由于观察点与拍摄物体之间的相对位置引起的。
当观察点位于离物体很近的位置时,物体的上部分会显得比下部分更加窄小,造成所谓的“倾斜效应”。
IPM原理是通过将原始图像进行透视反变换,使得物体的上部分与下部分保持相同的比例和大小。
具体步骤如下:
1. 首先需要确定摄像头与物体之间的相对位置和角度关系。
这可以通过标定摄像头参数,如焦距、投影矩阵等来实现。
2. 计算透视变换矩阵,这可以通过使用透视变换的参数以及图像的宽度和高度计算得出。
3. 对图像进行透视反变换,将图像中的每个像素点从透视投影到平面上。
这可以通过将透视变换矩阵应用于每个像素点的坐标来实现。
4. 最后,对反变换后的图像进行裁剪和缩放操作,以得到最终的纠正透视畸变后的图像。
逆透视变换通常用于计算机视觉和自动驾驶领域中,以纠正车辆前方摄像头的透视畸变,以便更准确地进行距离估计和目标检测。
逆透视变换原理

逆透视变换原理
逆透视变换是一种图像处理技术,它可以将一个透视变换后的图像恢复到原始的平面视图中。
透视变换是由于摄像机成像的特性而产生的,当物体离摄像机较远时,其投影在图像上较小,当物体离摄像机较近时,其投影在图像上较大。
这种投影变换可以通过逆透视变换来逆转。
逆透视变换的原理是根据透视变换的几何关系来计算逆变换矩阵,然后将逆变换矩阵应用于透视变换后的图像上,从而恢复到原始的平面视图中。
逆变换矩阵的计算涉及到摄像机的内部参数和外部参数,例如摄像机的焦距、相机与物体的距离等。
通过这些参数,可以计算出透视变换矩阵的逆矩阵,从而实现逆透视变换。
逆透视变换在许多应用中具有广泛的应用。
例如,在计算机视觉领域,逆透视变换可以用于校正摄像机捕捉的实际场景图像,使其恢复到原始的平面视图中。
在增强现实中,逆透视变换可以用于将虚拟对象与实际场景进行融合,使其看起来更加真实。
此外,逆透视变换还可以在图像处理和计算机图形学中用于消除透视投影引起的畸变、校正图像的透视变形等。
总结而言,逆透视变换是一种将透视变换后的图像恢复到原始平面视图的图像处理技术。
其原理是根据透视变换的几何关系计算逆变换矩阵,然后将逆变换矩阵应用于透视变换后的图像上。
逆透视变换在许多应用中具有广泛的应用,并且在计算机视觉、增强现实以及图像处理和计算机图形学中发挥着重要作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 或简记为:
y1 y2 f (x1 x2 )
四维向量空间
• 三维点由1×4的矩阵表示 • 三维向量由1×4的矩阵表示 • 1×4的矩阵构成四维向量空间
四维向量空间中线性变换的表示
• 对于三维空间中的点和向量,都由四维向 量表示 • 四维向量空间中线性变换可由四阶方阵表 示
a11 a21 A a31 a 41 a12 a22 a32 a42 a13 a23 a33 a43 a14 a24 a34 a44
Z : x y z0 1 x0 y0 z0 cos sin sin cos 1 1 1 1 cos sin 1 sin cos 1 sin cos 1 sin cos 1
a12 a22
二维旋转变换
设初始点为(x 0 , y 0 ),以原点为中心逆时针旋转后得新点(x, y) rei 0 re e
i 0 i
rei ( 0 )
x0 r cos 0 y0 r sin 0
r[cos( 0 ) i sin( 0 )] r[(cos 0 cos sin 0 sin ) i (sin 0 cos sin 0 cos )] ( x0 cos y0 sin ) i ( y0 cos x0 sin ) x x0 cos y0 sin y y0 cos x0 sin cos x y x0 y0 sin
0 sin 0 d cos 0 d h cos 0 1 d
第四章 不可逆与信息丢失
• 透视变换阵不可逆 • 不可逆的意义
透视变换阵不可逆
• • • • 上一章得到的透视变换阵第三列为零 则其可表示为其他三列的线性组合 故该矩阵的不满秩 0 0 0 故该矩阵不可逆 1
x
y
x
y
变换阵分区
a11 a21 a 31 a 41
旋转缩放与切变变换区
a12 a22 a32 a42
平移变换区
a13 a23 a33 a43
a14 a24 a34 a44
透 视 变 换 区
平移变换
• 平移变换只对点有效,对向量无效
x
y 1 1 z 1 x x y y 1 x y z 1 1 1 z 0 x y z 0 1 x y z 1 z z 1
0 cos 0 sin 0 h sin
sin 0 d cos 0 d h cos 0 1 d
透视变换阵不可逆
1 1 1 0 d 1
• 该矩阵在计算时的一个因子已经是奇异的 了 • 这个奇异性导致相乘后的矩阵也是奇异的 • 归根结底在于投影变换将三维空间的点映 射到二维空间,信息丢失。 • 不同的点可能映射到相同的点,故无法求 出其逆变换
y0
z0 1
投影变换
• 平行投影变换(Z方向)
1 1 1 x0 0 1
x0
y0
z0
y0
0 1
投影变换
• 透视投影变换 • 空间中任意一点与(-d,0,0)点的连线与Y,Z平 面的交点
x0
1 0 d 0 1 1 1 1 0 d x0 d 1
坐标变换
• 将摄像头坐标与智能车坐标重合(摄像头 质心置于智能车质心处并向下看) • 将摄像头向上平移一个高度h • 摄像头沿X轴旋转一个仰角 • 摄像头沿着Z轴方向透视 • 如此可由智能车坐标得摄像头坐标
坐标变换
• 将摄像头固定,上述过程可等价为:
– 智能车以及赛道向下平移一个高度h – 智能车以及赛道沿X负方向旋转一个仰角 – 智能车以及赛道沿着摄像头Z轴方向透视
第二章基本线性变换
• • • • • • • 恒等变换 变换阵分区 平移变换 缩放变换 旋转变换 切变变换 投影变换
– 平行投影变换 – 透视投影变换
• 组合变换 • 逆变换
恒等变换
• 任意三维点与向量乘以单位阵后不变
1 1 z 1 x y z 1 1 1 1 1 z 0 x y z 0 1 1
不可逆的意义
• 从映射关系上看,不可逆是因为不是一一 映射,不同的值映射到相同的象 • 从信息的角度看,变换时有部分信息丢失, 所以无法还原 • 从空间的角度看,三维空间变为二维空间, 丢失了一个维度 • 从矩阵的角度看,矩阵奇异,第三列的代 数余子式为零,不存在逆矩阵。
第五章 逆透视变换阵的求解与应用
组合变换
• 将两个或以上基本变换阵相乘,得到组合 变换阵 • 相乘的顺序表示基本变换执行的顺序
P0 A P 1 P 1B P 2 P0 AB P2 C AB P0C P2
逆变换
• 变换阵的逆矩阵表示其对应变换的逆变换
P0 A P 1
1 P0 AA1 P A 1 1 P0 P A 1
z1 0 x2 x z n n
y2 y2 y n
z 2 1 z 1 n
z2
0
x
i 1
n
zi 1 x
线性变换
• 变换即映射,记为: f : X Y 或 y f ( x) • 满足如下两个条件的变换为线性变换
y f (x)
y1 y2 f ( x1 x2 )
第三章 智能车摄像头透视变换阵
• • • • 坐标系 坐标变换 坐标变换阵 透视变换阵
坐标系
• 世界坐标系(W)
– 在地面选取两个垂直的方向为X,Y轴 – 竖直向上为Z轴
• 智能车坐标系(C)
– 正右方为X轴 – 前进方向为Y轴 – 竖直向上为Z轴
• 摄像头坐标系(G)
– 视线方向为Z轴负方向 – 正右方为X轴 – 正上方为Y轴
x
y
缩放变换
• 主对角线前三维能分别缩放某个维度 • 第四维整体缩放所有维度
x
y z 1
x y z w w x y z 1 w w w
旋转变换
• 二维旋转变换: • 已知点 ( x0 , y0 ) • 求该点绕原点逆时针旋转θ后的坐标 ( x, y)
向量的表示
• 三维空间中的向量用1×4的矩阵表示: • (x, y, z, 0) • 最后一位不得非零,否则表示点
点与向量之间的运算
• 向量±向量=向量 • 点±向量=点 • 点±点±点=点
x0 x0
y0 y0
i
z0
z0 1 x1 yi
0 x1
y1 y1 y
z1 0 x2
四维向量空间中线性变换的表示
• 若将四维向量看成行向量,则线性变换可 表示成对四维向量右乘变换阵的形式:
x0 x0
y0 y0
z0 1A x z0
0A x
y y
z 1
z 0
• A是线性变换阵,前者表示三维点,后者表 示三维向量 • 乘法按照矩阵相乘的计算法则计算
线性变换的表示
x f ( x0 , y0 ) y g ( x0 , y0 ) x a11 x0 a12 y0 y a21 x0 a22 y0 a11 ( x, y ) ( x0 , y0 ) a 21 ( x, y ) ( x0 , y0 ) A
X : x0
y
z 1 x0
y0
z0
Y : x
y0
z 1 x0
y0
z0
切变变换
• • • • 在第x列y行(第一列第二行)放一个系数k 点的y、z坐标不变,x坐标增加 y越大,x增加得越多 正方形被拉伸为梯形
x0
y0
z0
1 k 1 1 x0 ky0 1 1
sin cos
推广到三维旋转变换
• 沿Z轴正方向旋转的旋转变换阵 • (旋转方向用右手法则确定)
cos sin 1 sin cos 1 1
x
y
z0 1 x0
y0
z0
各个方向的旋转变换阵
y0
z0
y0
z0
dy0 d x0
dz0 d x0
投影变换
• (-d,0,0)为投影点,Y,Z平面为投影面 • 同理,以(0,-d,0)为投影点,X,Z平面为投影 面的变换阵,以(0,0,-d)为投影点,X,Y平面 为投影平面的透视变换阵分变为:
1 1 0 d 1 1 1 1 1 0 d 1
图像处理之逆透视变换
——智能车背景理论知识 系列专题讲座之一
主讲人:虞坤霖
目录
• • • • • • • • 第零章 前言 第一章 基础知识 第二章 基本线性变换 第三章 智能车摄像头透视变换阵 第四章 不可逆与信息丢失 第五章 逆透视变换阵的求解与应用 第六章 用逆透视变换阵处理图形 附 线性变换阵在空间定位中的应用
• • • • 补充信息使透视变换阵可逆 求逆矩阵 补充信息的几何意义 逆透视变换阵的应用
补充信息使透视变换阵可逆
• 只要将透视变换阵的主对角线全部补充为1 1 即可 1 1
第零章 前言
• 本文以智能车摄像头图像处理为背景 • 解决了根据图像信息逆透视变换得到赛道 信息的问题 • 以线性变换阵作为理论基础给出了矩阵变 换公式