电动轻型飞机电推进系统选型与参数匹配
突风气象条件下电动飞机电推进系统PI控制参数的设定方法

突风气象条件下电动飞机电推进系统PI控制参数的设定方法王书礼;马少华;张硕【摘要】电动飞机电推进系统采用高效永磁同步电机作为主驱动,配备矢量控制器.飞机在巡航过程中不可避免地会遭遇突风,影响飞机的稳定飞行.通过建立电动飞机在巡航阶段遭遇突风时的空气动力学模型和电推进系统的动态响应数学模型,并对模型进行求解,给出了突风气象条件下电推进系统速度PI控制参数的设定方法.以某双座电动飞机的电推进系统为研究对象,采用MATLAB仿真和样机地面试验对速度PI控制进行了仿真分析和试验测试,对比了未考虑和考虑突风气象条件下的速度PI 控制器的动态特性.仿真和样机试验结果表明:当飞机遭遇突风时,采用考虑突风气象条件的速度PI控制参数可以有效地降低螺旋桨的转速波动范围.【期刊名称】《电机与控制应用》【年(卷),期】2019(046)005【总页数】6页(P83-88)【关键词】电推进系统;突风;速度PI控制;PI控制参数【作者】王书礼;马少华;张硕【作者单位】沈阳工业大学电气工程学院,辽宁沈阳 110870;辽宁通用航空研究院,辽宁沈阳 110136;沈阳工业大学电气工程学院,辽宁沈阳 110870;北京理工大学电动车辆国家工程实验室,北京 100081【正文语种】中文【中图分类】TM351;S972.7+22370 引言电动飞机以电推进系统代替内燃机动力,具有节能环保、能耗小、噪声低、结构简单、易操作、布局灵活、乘坐舒适、操作简单、维护方便等优点,是名副其实的环境友好型飞机[1],广泛应用于飞行员培训、观光旅游、工农业生产、森林防火等领域[2]。
电动飞机的环境适应能力较差,只能在无降水、降雪等良好天气下飞行,但是,地球大气层内气象条件瞬息多变,即使在良好的天气条件下,也有可能发生突风,对电动飞机的安全可靠飞行构成严重威胁[3]。
电动飞机巡航阶段持续时间较长,受突风影响概率最大。
据不完全统计,因突风而引发的飞行事故不低于飞机总事故的10%。
电动飞机的设计与性能分析

电动飞机的设计与性能分析随着环境保护意识的增强和科技的迅猛发展,电动飞机逐渐成为航空业界的热门话题。
作为未来航空的一种潜在替代方案,电动飞机具有低碳排放、低噪音、高效能等诸多优势,然而其设计和性能分析仍然是一个具有挑战性的任务。
一、电动飞机的设计要素1.动力系统:电动飞机的核心部分是电力系统。
电动飞机动力系统主要由电机、电池和控制器组成。
电机是转换电能为动力的关键部件,其选型应考虑功率输出、效率和重量等因素。
电池则负责储存和提供电能,其能量密度和充电速度是关键指标。
控制器则起到调控电流和电压的作用,保证动力系统的稳定运行。
2.气动外形:电动飞机的气动外形设计需要兼顾飞行性能和能源利用效率。
流线型的机身和翼面可以降低飞行阻力,提高飞行速度。
此外,充分利用电动飞机的垂直起降优势,采用适当的垂直起降装置,可以提高起降效率。
3.材料选择:电动飞机材料的选择对于其性能至关重要。
轻质高强度的材料可以减轻飞机的整体重量,提高飞行效率和航程。
一些先进的材料,如复合材料和新型金属合金,具有较好的抗腐蚀性和耐高温性,适用于电动飞机的设计。
二、电动飞机的性能分析1.起飞性能:起飞性能是电动飞机设计中的重要参数之一。
通过计算起飞滑跑距离和速度,以及爬升率和精确的起飞性能,可以评估电动飞机的起飞性能。
起飞性能的好坏直接关系到飞机的安全性和使用的灵活性。
2.巡航性能:巡航性能是电动飞机在稳定飞行状态下的性能指标,主要包括最大速度、最大巡航高度和耗油量等。
通过对电动飞机的巡航性能进行分析,可以评估其飞行效率和续航能力。
3.降落性能:降落性能是电动飞机抵达目的地时的重要指标。
通过分析初始下降率、着陆距离和速度等参数,可以评估电动飞机在降落过程中的安全性和稳定性。
4.噪音和环保性能:电动飞机作为低噪音和低碳排放的交通工具,其噪音和环保性能的分析也是重要的研究方向。
通过设计减噪音的飞行器外形和采用低排放的电力系统,可以进一步提高电动飞机的环保性能。
电机与电调、电池间的匹配关系

电机与电调、电池间的匹配关系
电机与电调、电池间的匹配关系
首先,你要选择一个马达能适合你的飞机!
再选择一个能满足你马达峰值功率的电调!,T!l/K&G&k$@!y*z(n
最后选择一个能满足电调峰值功率的电池即可!*G'{!\%j0k4\
如:马达最大效率时,电流为:30A 3t'y)X&F7S7T,[
那么你选择的电调起码要30A ,但是一般出去安全考虑,电调要选择大一点的! 如:35A -40A
接下来就是电池了!
电池是根据你飞机的具体来确定用哪种规格的!
选好规格,那么就可以选择容量倍率!我爱模型玩家论坛
&q*|+H3G4B6r
如果一般450飞机都是用2200MA , 容量确定了,那就要看倍率
了!4x2{!x/r;R-F'}
如:2200MA 10C ,那么这个电池能以:2.2A(2200MA =2.2A )
*10=22A ,
显然不行,那么需要选择15C 2.2*15=33A ,这个可以满足前面的要求
了!7[(x8N#m*d*u+U)},o
那么就可以说,.这电池是比较适合你的飞机的!
但是为什么有的人都喜欢选20C 的呢?
因为,如果是20C 的电池,那么可以以:2.2*20=44A 的电流放电.
飞机最大功率时,电流只有30A ,这个电池可以44A 来放电,无疑,电池会更加轻松.
马达也是一直以最大功率来运行!获得的动力将是非常满意的!我爱。
电动模型飞机动力系统的配置(3)

电动模型飞机动力系统的配置(3)作者:张宇雄来源:《航空模型》2013年第03期在本文的第一部分(电动模型飞机动力系统的配置——初步认识)中,笔者介绍了航模电动动力系统的基本组成、性能参数和必备的安全知识。
接下来,笔者将从理论入手,分析航模电动动力系统选配的一般规律,供模友参考。
不同机型航模电动动力系统的配置虽然大部分航模电动动力系统的构成相似,但因机型的不同,以及重量、体积及飞行性能要求不同,相应动力系统的特点也不同。
优秀的动力性能是航模飞行性能的重要保证,而合理的动力系统选配是实现前者的必要条件。
在实际飞行中,如果电动动力系统各部件选配合理,那么即使采用了档次一般的器材,航模也能稳定可靠地飞行;反之,如果选配不合理,即使采用了昂贵的高端器材,也可能发生烧毁电机、损坏模型的情况。
简单介绍几条通用的电动模型飞机动力系统配置原则,适用于入门的初学者。
在为模型飞机选配电动动力系统的部件之前,模友须熟知并遵循这几条基本原则,才能保证航模的气动特性和飞行安全。
配置原则一:动力系统的推重比应满足飞行要求推重比,是飞机动力系统最大推力/拉力与飞机飞行重量的比值。
该参数是衡量动力系统乃至整架飞机性能的重要参数,尤其会对飞行性能产生很大影响(图1)。
具体到模型飞机,从理论上来说,只要动力系统产生的与前进方向相同的推力能克服飞行时的空气阻力,模型就能持续飞行。
但实际飞行时,这还远远不够:模型飞机起飞时要抵消地面与起落架之间的摩擦力;加速时要克服机体的惯性力;爬升或机动时要平衡其重力带来的一个水平分力;着陆失败时还要提供额外推力以复飞……因此,航模动力系统要能提供的最大推力,必须超出其“平飞”时所需的推力。
这样超出部分才能用于应对上述情况,也就是说“剩余推力”要足够大。
“剩余推力”的大小决定了模型的加速性能、爬升性能、机动性能、起飞距离等。
而若想获得足够的剩余推力,航模动力系统的推重比必须得大,即必须达到或超过设计推重比。
四旋翼电池、电机、螺旋桨选型与搭配

四旋翼电池、电机、螺旋桨选型与搭配1 电机1 电机KV值:——大KV配小桨,小KV配大桨。
KV值是每1V的电压下电机每分钟空转的转速,例如KV800,在1V的电压下空转转速是800转每分钟。
10V的电压下是8000转每分钟的空转转速。
绕线匝数多的,KV值低,最高输出电流小,但扭力大绕线匝数少的,KV值高,最高输出电流大,但扭力小KV值越小,同等电压下转速越低,扭力越大,可带更大的桨。
KV值越大,同等电压下转速越高,扭力越小,只能带小桨。
相对的说KV值越小,效率就越高。
航拍要选用低KV 电机配大桨,转速低,效率高,同样低转速电机的震动也小。
对航拍来说这些都是极为有利的。
2 电机型号:——定子粗的,力气大。
电机型号,如2212,3508,4010,这些数字表示电机定子的直径和高度(如下图)。
前面两位是定子直径,后面两位是定子高度,单位是毫米。
前两位越大,电机越肥,后两位越大,电机越高。
又大又高的电机我们称为高富帅。
力气大,效率高,价格嘛...嘿嘿!你懂得,!要不怎么能称为高富帅呢。
3 电机效率:—— 3~5A,效率高效率的标注方式是:g/W(克/每瓦)电机的功率和拉力并不是成正比的,也就是说50W 的时候450g拉力,100W的时候就不是900g了,可能只有700g。
具体效率要看电机的效率表。
大多数的电机在3A~5A的电流下效率是最高的。
一般正常飞行时,效率保持在合理的范围内,能够很好的保证续航能力。
以朗宇X3508S-700KV电机(下图)为例讲解,配APC1147桨,4S电池,5A电流时,效率8.1g/W,产生推力为600g,如果为4轴飞行器,共产生2.4公斤推力。
对于4S 5000mAh 电池,考虑各种影响因素,性能减半,续航时间也应该在30分钟以上吧。
(没试过,理论推断!)此时,电机工作刚好工作在最大推力(1500g)的2/5处,飞行性能较优。
4 经验一:整机重量,应该小于电机最大动力的2/5。
轻型电动飞机的主要性能参数估算

课程报告科目:轻型电动飞机的主要性能参数估算教师:姓名:学号:专业:类别:上课时间:考生成绩:轻型电动飞机的主要性能参数估算概述随着地面交通问题的不断增多和对商务航空运输的需求越来越大,用于个人短途使用的轻型节能的电动飞机开始进入到人们的研究领域,本文就轻型电动飞机的主要性能参数进行一个大概的估算。
对于民用短途支线交通飞机,载人数和客舱等级以及空间的舒适程度是很重要的设计标准。
同时,飞行速度和飞行高度,最大航程,最大飞行时间,起飞着陆性能指标都是在飞机初步设计阶段需要确定的指标。
在满足这些基本飞行要求和目的后,就需要对飞机做进一步的设计了。
对于轻型电动飞机根据设计要求,从气动、强度、制造工艺和使用维护等诸方面初步确定飞机总体布局形式采用正常布局,上单翼,并且机翼形状为矩形,水平尾翼安装在垂直尾翼上,并采用“T”型平尾的形式,起落架采用的是前三点式。
在确定设计要求后就需要对设计参数进行求解,在众多的飞机设计参数当中,最主要的有三个:1.飞机的正常起飞质量m0(kg);2.动力装置的海平面静推力P0(dan);3.机翼面积S(m2)。
飞机全质量的估算这里以对轻型电动飞机全质量进行估算为例来分析说明飞机性能参数设置,估算起飞质量的思路主要有两点:(1)首先根据设计要求(有效载荷、航程、续航时间、巡航速度),估算出所需的燃油质量油;(2)利用飞机起飞质量和空机质量空机的之间的统计经验公式。
基于上述两点,估算起飞质量、空机质量空机和燃油质量油可按以下步骤来进行:第一步:确定设计要求中所要求的设计要求有效载荷有效。
第二步:猜测一个合适的起飞质量值。
第三步:确定完成任务的燃油质量油。
第四步:按下式计算假想的(可用的)使用空机质量使用(可用):使用(可用)油有效第五步:按下式计算假想的(可用的)空机质量:空机(可用)使用(可用)不可用燃油机组对某些飞机的不可用燃油可按0.5% 计算,通常在设计阶段可以忽略掉。
第六步:利用飞机起飞质量和空机质量空机的之间的统计经验公式,计算出需用的空机质量使用(需用)。
氢电-锂电通勤飞机分布式推进系统匹配设计
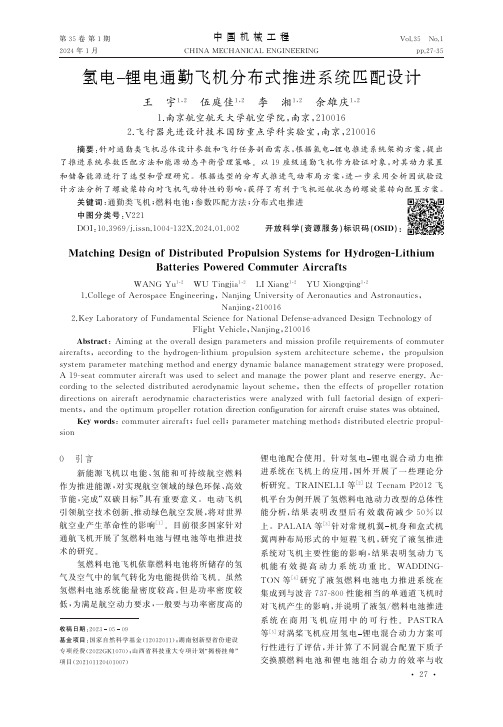
第35卷第1期中国机械工程V o l .35㊀N o .12024年1月C H I N A M E C HA N I C A LE N G I N E E R I N Gp p.27G35氢电锂电通勤飞机分布式推进系统匹配设计王㊀宇1,2㊀伍庭佳1,2㊀李㊀湘1,2㊀余雄庆1,21.南京航空航天大学航空学院,南京,2100162.飞行器先进设计技术国防重点学科实验室,南京,210016摘要:针对通勤类飞机总体设计参数和飞行任务剖面需求,根据氢电锂电推进系统架构方案,提出了推进系统参数匹配方法和能源动态平衡管理策略.以19座级通勤飞机作为验证对象,对其动力装置和储备能源进行了选型和管理研究.根据选型的分布式推进气动布局方案,进一步采用全析因试验设计方法分析了螺旋桨转向对飞机气动特性的影响,获得了有利于飞机巡航状态的螺旋桨转向配置方案.关键词:通勤类飞机;燃料电池;参数匹配方法;分布式电推进中图分类号:V 221D O I :10.3969/j .i s s n .1004 132X.2024.01.002开放科学(资源服务)标识码(O S I D ):M a t c h i n g D e s i g no fD i s t r i b u t e dP r o p u l s i o nS y s t e m s f o rH y d r o g e n GL i t h i u m B a t t e r i e sP o w e r e dC o m m u t e rA i r c r a f t sWA N G Y u 1,2㊀WU T i n g j i a 1,2㊀L IX i a n g 1,2㊀Y U X i o n g q i n g1,21.C o l l e g e o fA e r o s p a c eE n g i n e e r i n g ,N a n j i n g U n i v e r s i t y ofA e r o n a u t i c s a n dA s t r o n a u t i c s ,N a n j i n g,2100162.K e y L a b o r a t o r y o f F u n d a m e n t a l S c i e n c e f o rN a t i o n a lD e f e n s e Ga d v a n c e dD e s i g nT e c h n o l o g y of F l igh tV e hi c l e ,N a nj i n g,210016A b s t r a c t :A i m i n g a t t h e o v e r a l l d e s i g n p a r a m e t e r s a n dm i s s i o n p r o f i l e r e q u i r e m e n t s o f c o mm u t e r a i r c r a f t s ,a c c o r d i n g t ot h eh y d r o g e n Gl i t h i u m p r o p u l s i o ns y s t e m a r c h i t e c t u r es c h e m e ,t h e p r o pu l s i o n s y s t e m p a r a m e t e rm a t c h i n g m e t h o d a n d e n e r g y d y n a m i c b a l a n c em a n a g e m e n t s t r a t e g y w e r e p r o p o s e d .A19Gs e a t c o mm u t e r a i r c r a f tw a su s e d t os e l e c t a n d m a n a g e t h e p o w e r p l a n t a n dr e s e r v e e n e r g y.A c Gc o r d i n g t o t h e s e l e c t e dd i s t r i b u t e da e r o d y n a m i c l a y o u t s c h e m e ,t h e nt h ee f f e c t so f p r o pe l l e r r o t a t i o n d i r e c t i o n s o na i r c r af ta e r o d y n a m i cc h a r a c t e r i s t i c sw e r ea n a l y z e d w i t hf u l l f a c t o r i a ld e s ig no fe x pe r i Gm e n t s ,a n d t h e o p t i m u m p r o p e l l e r r o t a t i o nd i r e c t i o n c o nf i gu r a t i o n f o r a i r c r a f t c r u i s e s t a t e sw a s o b t a i n e d .K e y wo r d s :c o mm u t e r a i r c r a f t ;f u e l c e l l ;p a r a m e t e rm a t c h i n g m e t h o d ;d i s t r i b u t e d e l e c t r i c p r o p u l Gs i o n收稿日期:20230509基金项目:国家自然科学基金(12032011);湖南创新型省份建设专项经费(2022G K 1070);山西省科技重大专项计划 揭榜挂帅 项目(202101120401007)0㊀引言新能源飞机以电能㊁氢能和可持续航空燃料作为推进能源,对实现航空领域的绿色环保㊁高效节能,完成 双碳目标 具有重要意义.电动飞机引领航空技术创新㊁推动绿色航空发展,将对世界航空业产生革命性的影响[1].目前很多国家针对通航飞机开展了氢燃料电池与锂电池等电推进技术的研究.氢燃料电池飞机依靠燃料电池将所储存的氢气及空气中的氧气转化为电能提供给飞机.虽然氢燃料电池系统能量密度较高,但是功率密度较低,为满足航空动力要求,一般要与功率密度高的锂电池配合使用.针对氢电锂电混合动力电推进系统在飞机上的应用,国外开展了一些理论分析研究.T R A I N E L L I 等[2]以T e c n a m P 2012飞机平台为例开展了氢燃料电池动力改型的总体性能分析,结果表明改型后有效载荷减少50%以上.P A L A I A 等[3]针对常规机翼机身和盒式机翼两种布局形式的中短程飞机,研究了液氢推进系统对飞机主要性能的影响,结果表明氢动力飞机能有效提高动力系统功重比.WA D D I N G GT O N 等[4]研究了液氢燃料电池电力推进系统在集成到与波音737G800性能相当的单通道飞机时对飞机产生的影响,并说明了液氢/燃料电池推进系统在商用飞机应用中的可行性.P A S T R A等[5]对涡桨飞机应用氢电锂电混合动力方案可行性进行了评估,并计算了不同混合配置下质子交换膜燃料电池和锂电池组合动力的效率与收72益.国内主要是针对氢电锂电飞机在总体㊁气动㊁系统及支持设施等学科领域开展研究.黄俊[6]指出氢电锂电飞机在提高飞机气动效率㊁载运能力㊁环保性和鲁棒性等方面是一种航空领域的颠覆性技术.在氢能飞机总体概念设计领域,荆戈[7]针对E20GF C两座氢能飞机给出了概念设计方法,并对飞机的推进系统㊁总体布局进行了方案设计.李毅波等[8]对跨领域飞行器 空地两用燃料电池轻型飞机的总体参数进行了设计㊁建模与分析,其方法可用于此类飞行器的快速设计与参数权衡.刘福佳等[9]提出了轻型电动飞机依据任务剖面㊁商载和航程估算起飞总质量的方法.而对于分布式电推进分布概念在氢能飞机上的应用,孔祥浩等[10]论证了飞机燃料电池混合动力系统及分布式电推进系统方案的可能性,并指出分布式混合电推进技术是中大型飞机电气化的重要方向,且需要与多学科交叉融合共同发展.目前国内外主要是以新能源小型飞机或垂直起降飞机为研究对象评估和分析氢电锂电混合动力电推进技术对飞行性能和方案设计的影响,而针对支线客机和通勤飞机的研究,特别是考虑动力装置架构㊁气动布局和飞行平台性能之间的耦合关系与匹配情况的研究尚处于起步阶段.基于此研究背景,本文提出了19座级通勤飞机推进系统参数匹配设计方法,并对分布式气动布局方案进行分析,选取最优气动构型.1㊀氢电锂电混动架构方案采用氢燃料电池+锂电池混合动力方案的飞机电力系统主要包括氢燃料电池堆(P E M F C)㊁储氢罐㊁锂电池㊁D C/D C转换器㊁电机控制器㊁电机㊁螺旋桨㊁电缆线以及能量管理系统.锂电池和氢燃料电池通过D C/D C转换器改变输出的电压,通过电机控制器调节电机转速,驱动螺旋桨产生前进的拉力,锂电池作为辅助电池.考虑到飞机需求功率变化范围较大,氢燃料电池实际上只需要满足平均功率需求即可,超出平均功率的部分由锂电池补充,而当锂电池电量不足时,氢燃料电池又能同时为锂电池充电,从而提高整个能源供应系统的可靠性和稳定性.氢燃料电池和锂电池混合动力架构方案如图1所示[11].1.1㊀储能电池氢燃料电池使用质子交换膜燃料电池,具有较高的能量转换率和较小的工作温度限制,且工作点稳定,不受卡诺循环的限制[12],能量密度最高可达锂电池能量密度的上百倍,这对实现航空图1㊀氢燃料电池和锂电池混合动力架构[11]F i g.1㊀H y d r o g e n f u e l c e l l a n d l i t h i u mGi o nb a t t e r y h y b r i dp r o p u l s i o na r c h i t e c t u r e[11]轻量化具有重要意义,但氢燃料电池(加储氢罐)的功率密度通常不超过750W/k g.而锂电池则相反,功率密度可超过2000W/k g,而目前工业级锂电池能量密度仅为250W h/k g[13],因此,氢燃料电池搭配锂电池储能可满足飞机起飞爬升阶段大范围功率变化和快速响应的需求,是目前航空应用的最佳方案.1.2㊀储氢瓶氢气通常有三种储存方式,高压气态储氢㊁液态储氢和固态储氢.其中液态储氢需要将氢气冷却至-253ħ,同时液化需要消耗大量的能量,并且需要低温储存,目前尚不适合于航空运输.固态储氢依靠氢与稀土合金或纳米材料发生化学反应或物理吸附来储存,这类储氢方式储氢密度大㊁储氢压力小㊁安全性高,但是目前技术尚未成熟,未来具有较大发展潜力[14].现阶段的主要储氢方式是采用高压气态储氢,它具有充放氢气速度快㊁容器结构简单等优点,常用气瓶有35M P a和70M P a两种形式[15].1.3㊀电机目前高功率电机主要有永磁同步电机(无刷直流电机)和超导电机两种.超导电机采用超导体代替常规材料实现机械能与电能的转换,此技术尚未成熟.目前在电动飞机上应用较多的是永磁同步电机,它具有功重比较大㊁效率高和可靠性高的特点,同时电机具有相对尺度无关性,可用多个小功率电机取代单个大功率电机,两者的功率密度和质量基本保持不变,这为分布式气动设计提供了条件,可结合推进㊁气动学科得到综合性能的收益[16].1.4㊀螺旋桨螺旋桨作为将电机的功率转化为飞机向前推力的重要装置,根据桨叶角是否可调分为变距螺旋桨和定距螺旋桨.定距螺旋桨只能在部分选定速度范围内效率最高,但构造简单㊁质量轻,故被广泛应用于轻型飞机.变距螺旋桨可通过调整桨82中国机械工程第35卷第1期2024年1月距来满足不同飞行任务阶段需求.2㊀氢电锂电推进系统参数选型匹配氢电锂电推进系统匹配要求选型的新能源装置满足飞机重量和运载能力要求,根据适航条例和飞机总体设计参数,对飞机推进装置进行选型匹配.2.1㊀任务需求功率计算根据飞机总体设计要求,由飞机在起飞滑跑㊁爬升㊁巡航㊁下降阶段运动方程计算飞机各任务阶段需求功率.其中起飞滑跑过程可近似看作飞机匀加速运动,爬升和下降阶段可视为飞机以定常上升或下滑,巡航阶段可视为飞机处于平衡状态,即升力与重力㊁阻力与推力相平衡.起飞滑跑阶段功率由文献[9]进行估算:P L O F=W T O a(v c l/3.6)+W T O f g(v l d/3.6)+ρ(v l d/3.6)3S(C x_T O-f C y_T O)2(1)s TO R=v2l d2a(2)式中,a为起飞滑跑阶段的加速度;s TO R为起飞滑跑距离; P L O F为起飞滑跑阶段消耗的平均功率;v l d为飞机离地速度;f为地面摩擦因数;ρ为空气密度;S为机翼面积;v c l 为爬升阶段平均速度;W T O为飞机起飞质量;g为重力加速度;C x_T O为起飞滑跑阶段飞机阻力系数;C y_T O为起飞滑跑阶段飞机升力系数.爬升阶段功率可根据定常爬升计算:P c l=W T O g v c l c o sα3.6L c l+W T O g v c l s i nα3.6(3)式中,P c l为爬升阶段所消耗的平均功率;α为爬升角;L c l 为爬升阶段飞机升阻比.巡航阶段功率可根据飞机平衡状态计算:P V C=W T O gL V C v C(4)式中,P V C为飞机巡航时所需功率;v C为飞机巡航速度; L V C为巡航阶段飞机升阻比.飞机在各飞行阶段所需的功率由氢燃料电池和锂电池共同提供.2.2㊀电机参数选择电机功率指标有持续功率和峰值功率两种.持续功率也称为额定功率,是指电机稳定工作能持续输出的功率,它随着螺旋桨的转速变化而变化,而峰值功率是指在特定转速下电机所能达到的最大功率[17].选型电机应根据飞行任务剖面功率需求而定.在起飞滑跑阶段,电机需要短时间提供较大的功率,此功率应小于电机总的峰值功率.而巡航阶段占总飞行时长较长,电机应该以持续功率长时间工作,任务所需功率应接近电机最大持续功率,即P L O F<N P p e a kηmηpηc(5)P V CʈN P c o n t i o u sηmηpηc(6)式中,N为电机总个数;P p e a k㊁P c o n t i o u s为单个电机的峰值功率和持续功率;ηm为电机的工作效率;ηp为螺旋桨工作效率;ηc为电机控制器的工作效率.电机个数选择应与单个电机功率具有较好的匹配关系[18],如下式所示:P S1=(l N kd)4vσD NΩl(7)式中,P S1为匹配较好的单个电机功率;l为机翼的展长; k d为直径系数;v为飞机飞行速度;σ为空气相对密度;Ω为电机的转速;D为参考机型螺旋桨直径.实际上分布式电推进飞机单个电机的功率为参考机型电机总功率除以电机个数的平均值:P S2=P m N(8)式中,P m为参考机型电机总功率.当P S1与P S2近似相等时,电机功率与螺旋桨具有较好的匹配关系.2.3㊀螺旋桨参数选择由于巡航在飞机任务阶段中占比时间较长,且直接影响飞机的续航时间,因此螺旋桨直径和性能参数估算应以巡航段作为设计参考点,相关公式[19]如下:D p=k d4P s c vσn(9)C P=P s cρn3D5p(10)C T=T s cρn2D4p(11)ηp=J C T C P(12)式中,D p为螺旋桨的直径;P s c为单个电机在飞机巡航时输出功率;n为螺旋桨的转速;T s c为单个螺旋桨产生的牵引力;J为螺旋桨进距比;C T㊁C P分别为螺旋桨的拉力系数和功率系数.2.4㊀电池组参数选择氢燃料电池搭配锂电池的储能方案应满足驱动电机电压变化要求,使得电池组输出功率与电机负载匹配.选型的氢燃料电池节数设为n1,锂电池节数设为n2;氢气罐个数设为n3.单节氢燃料电池电压记为U H2,输出功率记为P H2,质量记为W H2;单节锂电池电压记为U b a t,输出功率记为P b a t,质量记为W b a t,所含电能记为E b a t.单个70M P a储氢罐质量记为W j a r,质量储氢密度记为ρmH2.氢燃料电池与锂电池输出电压之和应与电机工作电压近似相等(不考虑额外电压损耗),输出92氢电锂电通勤飞机分布式推进系统匹配设计 王㊀宇㊀伍庭佳㊀李㊀湘等功率之和经D C /D C 转换器㊁电机控制器效率损耗后提供电机负载功率,在满足电池组总质量约束W s u m 限制下,使得能量E s u m 达到最大.电池组能量包括锂电池所含电量和氢气罐高压氢气化学反应产生的化学能.设1m o l 氢气发生化学反应生成液态水所能产生的能量为Q ,则Q =241k J /m o l ,每千克氢气物质的量为500m o l ,因此电池组总能量为E s u m =500n 3W j a r ρmH 2Q +n 2E ba t (13)电池组参数选择可提炼为如下优化问题:m a x ㊀E s u ms .t .ηm ηC ηD C (n 1P H 2+n 2P Ba t )ȡP mm a x n 1U H 2+n 2U B a t ʈU m n 1W H 2+n 2Wb a t +n 3W j a r ɤW s u müþýïïïï(14)式中,ηD C 为D C /D C 转换器的工作效率;P mm a x 为电机总的峰值功率;U m 为电机的工作电压.3㊀氢电锂电动态平衡能量管理实际上氢燃料电池的氢气并不能完全消耗,燃料电池堆的最大转化效率为0.6[20],而锂电池为了保障飞机安全,通常也会留下20%的电池余量.飞机在真实飞行中会受到突风影响,因此飞机的需用功率在不断变化,为了模拟飞机功率变化情况,设置固定间隔时间内任务功率在ʃ10%的范围内变化.在氢电锂电混合方案中,氢气的单位时间消耗量随着燃料电池的输出功率变化而改变,导致锂电池单位时间消耗能量与氢气消耗量不能达到平衡,从而会出现锂电池或燃料电池中某一能源过度消耗,而另一种能源消耗较少的情况.为了避免这种情况发生,本文设计了燃料电池混合能源的动态平衡能源策略,对燃料电池和锂电池的功率进行动态分配[21].氢气剩余比例表示为S H 2,锂电池的剩余电量百分比表示为S b a t ,以S (S =S b a t -S H 2)表示二者之差.当锂电池的剩余电量大于安全电量20%时,共对应三种情况:(1)S <-3%(负状态),表示锂电池相对于燃料电池消耗过快,燃料电池在下一间隔时间内应给锂电池充电,锂电池此时为充电时最大负功率,燃料电池同时给负载和锂电池供电.(2)-3%ɤS ɤ3%(状态均衡),表示锂电池相对于燃料电池消耗基本处于持平状态,在下一间隔时间内,锂电池的输出功率应保证燃料电池的效率ηF C 最高.(3)S >3%(正状态),表示锂电池相对燃料电池消耗要低,下一时刻应当将超出比例的电荷全部释放掉.根据电荷和释放时间,可以计算出锂电池的输出功率.当锂电池的剩余电量到达安全电量20%时,锂电池不再工作,此时负载功率全部由燃料电池提供,直到氢气完全消耗完.图2为能量动态平衡策略流程示意图.图2㊀动态能量平衡策略流程F i g .2㊀D y n a m i c e n e r g y b a l a n c e s t r a t e g ypr o c e s s03 中国机械工程第35卷第1期2024年1月㊀㊀氢气和锂电池初始剩余比例为1,根据锂电池的剩余电流和两者剩余的差值比例来判断工作状态,通过执行每种状态下的算法对差值比例进行动态调整,保证锂电池的耗电量和氢燃料电池的耗氢量维持动态平衡.图2中,P b a t表示当前锂电池的输出功率;P F C表示当前燃料电池的输出功率;P l o a d表示当前电机负载功率;ΔS b a t表示锂电池在Δt时间段内电量变化的百分比,ΔS b a t=P b a tΔt/Q t o t a l;ΔS H2为氢气在Δt时间内消耗占比,ΔS H2=C F CΔt/m H2;C F C为单位时间内氢气的消耗质量,可根据B a l l a r d氢燃料电池公司提供的公式C F C=1.68875F H2(ρH2/ρ)进行估算(F H2表示氢气的流量,与燃料电池单元数量的电流大小有关;ρH2为氢气在当前气压下的密度).4㊀应用算例本文以19座级通勤飞机YG12F作为研究对象,按照氢电锂电推进系统参数匹配方法,对以燃油为动力的飞机动力装置进行新能源选型.最后按照选型结果对任务功率进行动态分配,对推进系统能量储备进行管理.按照飞机总体设计要求和任务剖面运动方程计算各任务阶段发动机需用功率,如表1所示.表1㊀各任务状态需用功率T a b.1㊀T h e r e q u i r e d p o w e r f o r e a c hm i s s i o n s t a t e任务剖面时间(s)需用功率(k W)起飞滑跑15.251314.9爬升428.571128.67巡航14112975.87下降428.57131.49㊀㊀根据任务需用功率和推进系统参数匹配方法,对电机㊁氢燃料电池㊁锂电池㊁螺旋桨进行选型设计.选型的电机为10台E M R A X268电机,总干质量仅为223k g.10台电机最大总持续输出功率为1170k W,满足任务功率需求,分别在机翼两侧各安装5台电机.图3为理想的螺旋桨效率图[22],根据螺旋桨的功率系数和所对应的进距比可获得螺旋桨的效率.螺旋桨类型选择为三桨叶,代入相关数据计算可得螺旋桨直径D为1.328m,螺旋桨的拉力系数C T为0.08,功率系数C P为0.102.选择B a l l a r d公司的F C g e n®GH P S氢燃料电池和S A F T公司的S e a n e r g y®的锂离子动力电池.选择F a u r e c i a公司研发的高压70M P a储氢瓶,52L和68L容积类型气瓶的参数如表2所示.图3㊀理想的螺旋桨效率图[22]F i g.3㊀I d e a l p r o p e l l e r e f f i c i e n c y d i a g r a m[22]表2㊀F a u r e c i a70M P a储氢瓶T a b.2㊀70M P ah y d r o g e n s t o r a g e b o t t l e o f F a u r e c i a型号C H G3G334G52G70T/B C H G3G334G68G70T/B 水容积(L)5268外径(mm)394440长度(mm)860900质量(k g)5268储氢量(k g)2.12.8质量储氢密度(%)3.84容积储氢密度(g/L)4040压力(M P a)7070㊀㊀目前电机装置功率密度已经达到了4k W/k g,氢燃料电池系统的功率密度为0.85k W/k g,电机控制器的功率密度在10k W/k g左右,70M P a储氢系统储氢密度为4%.根据各分系统功率密度可计算出主要电力系统部件的质量,如表3所示.表3㊀氢锂混动架构主要系统部件质量T a b.3㊀Q u a l i t y o fm a i n s y s t e mc o m p o n e n t s o f h y d r o g e nGl i t h i u mf u e l h y b r i da r c h i t e c t u r e分系统名称部件名称质量(k g)电动力系统电机+电缆292.5电机控制器117螺旋桨及安装组件螺旋桨及其组件20电池组系统锂电池(1节)200氢燃料电池堆(9节)1482储氢系统储氢系统(含氢气)714.5㊀㊀根据所选型的新能源推进装置,采用动态能量平衡管理策略对氢气的消耗和锂电池电能消耗进行动态调度,保证两种能源消耗处于动态平衡状态,能量动态平衡策略仿真结果如图4所示.可以看出,燃料电池承担大部分负载功率,而锂电池对其负载功率进行补充,当锂电池电量消耗过快时,燃料电池对锂电池电量进行补充,维持二者消耗动态平衡.当锂电池电量低于安全电量时,锂电池不再工作,由燃料电池单独负责任务负载,直到氢气被完全消耗.氢气推进系统设计布局示意如图5所示.13氢电锂电通勤飞机分布式推进系统匹配设计 王㊀宇㊀伍庭佳㊀李㊀湘等(a)功率随时间变化曲线(b)剩余氢气比例随时间变化曲线(c)荷电状态随时间变化曲线图4㊀氢电锂电能量动态平衡仿真结果F i g .4㊀D yn a m i c b a l a n c e s i m u l a t i o n r e s u l t s o f h y d r o ge n Gl i t h i um 图5㊀氢电锂电推进布局示意图F i g .5㊀H y d r o g e n Gl i t h i u m p r o p u l s i o n l a yo u t s c h e m a t i c 5㊀分布式推进气动分析根据电机功率匹配结果,需要在机翼两侧前缘各安装5个螺旋桨,保证螺旋桨产生的功率满足巡航需求,当电机轴转速发生改变时,螺旋桨的输出功率也会随之发生改变.螺旋桨相对机翼的安装位置,不同位置螺旋桨的转速㊁转向会给气动计算带来不同程度的影响.本文采用O pe n V S P 软件中的V S P A E R O 气动模块进行计算,它集成了涡格法和面元法,螺旋桨特性求解方面包含了叶素法和激励盘方法,文献[23]使用此模块对X 57高升力螺旋桨进行计算,并与O V E R F L OW 的分析结果进行对比验证,证明了该方法具有可靠的精度和较快的计算速度.图6为气动模型示意简图,分别为气动模型的俯视图和后视图,沿展向将机翼划分为机身区和优化区,螺旋桨仅在优化区域内移动,每一个螺旋桨限制在虚线范围内.为了研究螺旋桨转向对气动性能的影响,将转向以数字量化,用D i r 1,D i r 2, ,D i r 5表示右侧机翼由翼根到翼梢5个螺旋桨的转向,以飞行员视角,螺旋桨顺时针方向记为 1 ,螺旋桨逆时针转向记为 0.以螺旋桨转向作为设计输入变量,激励盘的位置和转速不变,螺旋桨相对于机翼位置与图6一致,设置螺旋桨转速为巡航转速,对右机翼螺旋桨所有转向采用全析因试验设计,共32种情况,输出变量为升力系数㊁诱导阻力系数㊁摩擦阻力系数.通过改变螺旋桨的转向分析每一个螺旋桨的转向对输出变量相关性影响,分析螺旋桨转向对气动带来的增益或抑制效果.根据螺旋桨转向全图6㊀气动优化模型示意图F i g .6㊀A e r o d y n a m i c o pt i m i z a t i o nm o d e l s c h e m a t i c23 中国机械工程第35卷第1期2024年1月析因试验设计结果,绘制了转向对升力系数和诱导阻力系数影响的P a r e t o 图,如图7所示,图中l o w 表示转向取值为0(即逆时针转向),h i gh 表示转向取值为1(即顺时针转向).从气动角度分析,如图7a 所示,沿机翼展向由翼根到翼梢,对升力影响较大的是螺旋桨3和螺旋桨5的转向.螺旋桨3和螺旋桨4之间以逆顺对转,螺旋桨会产生上洗气流,会加速滑流区气流流动,从而增大升力系数.螺旋桨2和螺旋桨3之间以顺逆对转,会减少滑流区气流流动,减小升力系数,但由于螺旋桨2对升力影响仅占7%,小于螺旋桨4对升力的影响,因此从螺旋桨1到螺旋桨4最佳转向为逆 顺 逆 顺,而对于翼尖螺旋桨5,采用顺时针旋转会产生下洗气流,抑制下翼面在翼尖处上翻气流,减少翼尖涡流的影响,刚好对诱导阻力产生抑制作用,对提高升力有显著增益效果.而对于诱导阻力,如图7b 所示,翼尖螺旋桨5与图7a 原理一致,而要减少诱导阻力,相邻螺旋桨旋转方向应产生下洗气流或尽可能抑制上洗气流,减少由升力引起的附加阻力.螺旋桨2相对于螺旋桨1能产生下洗气流,同时螺旋桨3相对于螺旋桨2能抑制螺旋桨2引起的上洗气流.在32组转向配置中,最有利于增大升力系数C L ㊁减小诱导阻力系数C D i 的转向如图8所示.(a)转向对升力系数影响㊀㊀(b)转向对诱导阻力系数影响(c)转向对零升力阻力系数影响㊀㊀(d)转向对升阻比影响图7㊀激励盘转向对升阻特性影响F i g .7㊀T h e i n f l u e n c e o f a c t u a t o r d i s k s t e e r i n g o n l i f t Gd r a g ch a r a c t e r i s t i cs (a )C L 最优时转向示意图(b )C D i 最优时转向示意图图8㊀C L 、C D i 最优时的转向F i g .8㊀T h e o pt i m u mr o t a t i o nd i r e c t i o n s f o r C L a n d C D i33 氢电锂电通勤飞机分布式推进系统匹配设计王㊀宇㊀伍庭佳㊀李㊀湘等㊀㊀为了进一步说明螺旋桨对机翼升力系数的影响,绘制了分布式构型㊁双发构型㊁无桨构型升力系数展向分布图,见图9.分布式构型和双发构型相对于无桨构型,在有螺旋桨位置处升力系数突变增大,使得整体升力系数增大.而对比双发构型和分布式推进构型,双发构型升力系数呈双峰分布,而分布式推进构型呈现多峰分布.分布式推进方案较双发方案,升力系均值数由0.705提高到0.720,而诱导阻力系数出现显著下降趋势,由0.0127减小到0.0104,从而使得全机总的升阻比得到较大提高.图9㊀三种气动构型巡航展向升力系数分布图F i g .9㊀C r u i s e s pa n w i s e l i f t c o e f f i c i e n t d i s t r ib u t i o no f t h r e e a e r o d y n a m ic c o n f i gu r a t i o n s 6㊀结论(1)针对氢电锂电混动架构方案,提出了新能源推进装置选型和参数匹配方法,建立了燃电锂电能量动态平衡策略.(2)以19座级通勤飞机Y 12F 为应用示例,对推进装置进行新能源选型设计,根据选型装置对氢气的消耗和锂电池电能消耗进行了动态调度.(3)采用全析因试验设计方法对分布式气动布局中螺旋桨的32种转向配置方案进行了分析,获得了最优转向.参考文献:[1]㊀孙侠生,程文渊,穆作栋,等.电动飞机发展白皮书[J ].航空科学技术,2019,30(11):1G7.S U N X i a s h e n g ,C H E N G W e n y u a n ,MU Z u o d o n g ,e ta l .W h i t eP a p e ro nt h eD e v e l o pm e n to fE l e c t r i c A i r c r a f t [J ].A e r o n a u t i c a lS c i e n c e &T e c h n o l o g y ,2019,30(11):1G7.[2]㊀T R A I N E L L IL ,S A L U C C IF ,C OM I N C I N ID ,e ta l .S i z i n g a n dP e r f o r m a n c e o fH y d r o g e n Gd r i v e nA i r Gpl a n e s [C ]ʊI t a l i a n A s s o c i a t i o no fA e r o n a u t i c sa n d A s t r o n a u t i c s ⅩⅩⅤI n t e r n a t i o n a lC o n gr e s s .R o m a ,2019:1058G1065.[3]㊀P A L A I A G ,S A L E M K A ,C I P O L L A V ,e ta l .C o n c e p t u a l I n v e s t i g a t i o no n P e r f o r m a n c eo fS h o r t Gm e d i u m R a n g eA i r c r a f tw i t hL i q u i d H y d r o ge nP r o Gpu l s i o n a n dD i f f e r e n tA i r f r a m eA r c h i t e c t u r e s [C ]ʊA I A A S C I T E C H 2023F o r u m.N a t i o n a l H a r b o r,2023:0214.[4]㊀WA D D I N G T O N E ,M E R R E TJM ,A N S E L LPJ .I m p a c t o f L H 2F u e l C e l l Ge l e c t r i cP r o p u l s i o no nA i r Gc r a f t C o n f i g u r a t i o n a n d I n t e g r a t i o n [C ]ʊA I A A A v i Ga t i o n2021F o r u m.V i r t u a l E v e n t ,2021:2409.[5]㊀P A S T R ACL ,C I N A RG ,MA V R I SDN.F e a s i b i l Gi t y a n d B e n e f i t A s s e s s m e n t so f H y b r i d H y d r o g e n F u e l C e l l a n dB a t t e r y C o n f i g u r a t i o n so naR e g i o n a l T u r b o p r o p A i r c r a f t [C ]ʊA I A A A V I A T I O N 2022F o r u m.C h i c a g o ,2022:3290.[6]㊀黄俊.分布式电推进飞机设计技术综述[J ].航空学报,2021,42(3):13G29.HU A N GJ .S u r v e y o n D e s i g n T e c h n o l o g y ofD i s Gt r i b u t e dE l e c t r i cP r o p u l s i o nA i r c r a f t [J ].A c t aA e r o Gn a u t i c a e t A s t r o n a u t i c a S i n i c a ,2021,42(3):624037.[7]㊀荆戈.燃料电池轻型飞机概念设计研究[D ].南京:南京航空航天大学,2017.J I N GG e .AS t u d y o nC o n c e p t u a l D e s i g n o f F u e l Gc e l l P o w e r e d E l e c t r i c a l L i g h t A i r c r a f t [D ].N a n j i n g:N a n j i n g U n i v e r s i t y o f A e r o n a u t i c sa n d A s t r o n a u Gt i c s ,2017.[8]㊀李毅波,林鹏,陶晓洋,等.空地两用燃料电池轻型飞机总体参数设计与建模[J ].飞机设计,2016,36(5):29G33.L IY i b o ,L I N P e n g ,T A O X i a o y a n g,e t a l .O v e r a l l P a r a m e t e rD e s i g na n d M o d e l i n g o fA i r Gg r o u n dF u e l C e l lL i g h t A i r c r a f t [J ].A i r c r a f tD e s i g n ,2016,36(5):29G33.[9]㊀刘福佳,杨凤田,刘孟诏,等.电动轻型飞机起飞总质量估算方法[J ].科学技术与工程,2018,18(5):118G123.L I U F u j i a ,Y A N G F e n g t i a n ,L I U M e n g z h a o ,e ta l .E s t i m a t e dM e t h o d o f t h eT a k e Go f fM a s s o f t h eE l e c Gt r i cL i g h tA i r c r a f t [J ].S c i e n c eT e c h n o l o g y an dE n Gg i n e e r i n g,2018,18(5):118G123.[10]㊀孔祥浩,张卓然,陆嘉伟,等.分布式电推进飞机电力系统研究综述[J ].航空学报,2018,39(1):51G67.K O N G X i a n gh a o ,Z HA N G Z h u o r a n ,L U J i a w e i ,e ta l .R e s e a r c ho nD i s t r i b u t e dE l e c t r i cP r o pu l s i o n43 中国机械工程第35卷第1期2024年1月。
飞行器设计中的新型推进系统与应用

飞行器设计中的新型推进系统与应用在人类探索天空和宇宙的征程中,飞行器的推进系统始终是关键的技术之一。
从早期的螺旋桨发动机到现代的喷气式发动机,每一次推进技术的革新都带来了飞行器性能的巨大提升。
如今,随着科技的不断进步,新型推进系统正逐渐崭露头角,为飞行器的发展开辟了新的道路。
一、新型推进系统的类型(一)电动推进系统电动推进系统是近年来备受关注的一种新型推进方式。
与传统的燃油发动机相比,电动推进系统具有诸多优势。
首先,它在运行过程中不会产生有害气体排放,对环境更加友好。
其次,电动推进系统的能量转换效率较高,能够有效地降低能源消耗。
此外,电动推进系统的结构相对简单,维护成本较低。
在电动推进系统中,电池技术是关键。
目前,锂离子电池在电动飞行器中得到了广泛应用,但仍存在能量密度较低、充电时间长等问题。
为了解决这些问题,科研人员正在努力研发新型电池技术,如固态电池、锂硫电池等。
同时,超级电容器和燃料电池也被视为未来电动推进系统的潜在能源来源。
(二)离子推进系统离子推进系统是一种利用离子在电场中加速产生推力的推进方式。
这种推进系统的推力虽然较小,但具有极高的比冲(单位质量推进剂产生的冲量),因此非常适合用于长寿命、高精度的太空任务。
离子推进系统的工作原理是将推进剂(通常为氙气)电离成离子,然后通过电场加速离子,使其高速喷出产生推力。
由于离子的速度极高,因此可以在消耗较少推进剂的情况下获得较大的冲量。
离子推进系统已经在一些卫星和深空探测器上得到了应用,如美国的“黎明号”探测器和欧洲的“智能 1 号”月球探测器。
(三)等离子体推进系统等离子体推进系统是一种利用等离子体的电磁特性产生推力的推进方式。
等离子体是一种由自由电子和带电离子组成的物质状态,具有良好的导电性和热性能。
在等离子体推进系统中,通过电磁场将等离子体加速并喷出,从而产生推力。
这种推进系统的比冲较高,且可以通过调节电磁场的参数来控制推力的大小和方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电动轻型飞机电推进系统选型与参数匹配刘福佳;杨凤田;刘远强;李东辉【摘要】电动飞机为实现彻底的绿色航空提供了一条光明的技术途径,作为电动飞机动力和能量的来源,电推进系统的参数匹配对电动飞机环保、节能和高效起到关键作用.首先,本文对电动轻型飞机电推进系统进行了简要概述,并分析了其组成部分的特点.其次,结合目前电动轻型飞机电推进系统的特点,给出了电推进系统选型与参数匹配的设计过程.然后,根据电推进系统各组成部分的特点,提出了一套电推进系统选型与参数匹配的方法,包括螺旋桨的选型与参数匹配、电动机的选型与参数匹配、控制器的选型与参数匹配、电池组的选型与参数匹配,该方法可以为电推进系统的优化设计提供依据.最后,以RX1E电动轻型飞机为例对此方法进行了验证,匹配结果满足设计要求,说明了此方法的可行性.【期刊名称】《南京航空航天大学学报》【年(卷),期】2019(051)003【总页数】7页(P350-356)【关键词】电推进系统;电动飞机;蓄电池;选型;参数匹配【作者】刘福佳;杨凤田;刘远强;李东辉【作者单位】沈阳飞机设计研究所,沈阳,110035;辽宁通用航空研究院,沈阳,110136;沈阳飞机设计研究所,沈阳,110035;辽宁通用航空研究院,沈阳,110136;沈阳飞机设计研究所,沈阳,110035;辽宁通用航空研究院,沈阳,110136;沈阳飞机设计研究所,沈阳,110035;辽宁通用航空研究院,沈阳,110136【正文语种】中文【中图分类】V237传统的燃油飞机对环境的影响主要有3个方面:(1)机场附近的噪声污染;(2)由于飞机排放造成的空气质量下降;(3)飞机向大气排放的二氧化碳等温室气体对区域和全球气候造成的影响[1]。
另外,地球的石油资源也是有限的,再过40~50年,石油资源也将枯竭[2]。
因此,如何缓解和解决飞机对环境的影响以及对石油资源的依赖成为了必须考虑的问题。
电推进系统具有高效率、零污染、结构简单和易维护等优点[3],用于代替活塞发动机动力系统作为飞机的动力来源,将有效地解决环境污染问题及能源危机问题,是飞机动力系统的一个重要发展方向。
电动飞机与燃油飞机相比,具有轻质量、较大的功重比、高效率、低噪音、高可靠性和安全性、低运营成本、无污染等优点。
电动飞机分为太阳能电动飞机、蓄电池电动飞机(主要是锂电池电动飞机)和燃料电池电动飞机[4-6]。
目前有人电动飞机受电推进系统性能所限主要为能耗较低的2座及以下的低档简易型航空器,包括动力伞、动力三角翼、动力滑翔机、超轻型飞机和轻型运动飞机等[7],具体型号包括 ElectraFlyer Trike,ESA,E430,eSpyder,Cessna 172, Elektra One,APEV Pouchelec,Cri-Cri,E-Fan,e-Genius,Taurus G4 和 RX1E 等[8]。
对于有人电动飞机来说,续航能力是决定其在市场上能否有应用空间的决定性因素,而电动飞机的续航能力与电推进系统效率成正比,因而对电推进系统进行良好的参数匹配提高电推进系统效率,对增加电动飞机的续航能力有重要意义。
本文主要对蓄电池电动飞机进行研究,根据其电推进系统的特点,结合飞行动力学计算结果,提出了电动轻型飞机的电推进系统选型与参数匹配的方法,该方法可为电动轻型飞机电推进系统的设计提供依据。
1 电推进系统概述电推进系统为飞机提供能源和用于克服阻力使飞机飞行的动力,主要由电池组、电动机、控制器和螺旋桨等组成。
其中,电池组将化学能转换为电能,为飞机提供和所需的能量;电动机将电能转换为机械能,并由控制器控制满足不同飞行状态所需的输出功率;螺旋桨为飞机提供飞行的动力。
电动飞机的电推进系统组成见图1。
图1 电动飞机的电推进系统Fig.1 Electric light aircraft propulsion system1.1 电池组能量密度较高的电池有3类:锂离子电池、空气电池和石墨烯电池[8]。
锂离子电池按电解液可分为液态锂离子电池和聚合物锂离子电池(简称锂聚电池),目前锂聚电池在电动飞机上应用广泛,其理论能量密度大于300 W·h/kg,安全使用的能量密度介于100~200 W·h/kg[3,8];空气电池主要包括锌空气电池、锂空气电池、铝空气电池和镁铝空气电池等,这些电池能量密度在300 W·h/kg以上,存在近期在电动飞机上应用的可行性;石墨烯电池号称“充电1 min续航1 000千米”,尽管理论能量密度高,但目前其应用前景尚存在争论,在飞机上的应用有待论证[8]。
1.2 电动机目前安装在电动飞机上的电动机主要为有刷和无刷永磁直流电动机。
无刷电动机具有高效率、易控制、维护方便、可靠性高、体积小和质量轻等优点[9]。
1.3 控制器无刷电动机工作需要有控制器进行控制[10]。
控制器的功能为:(1)将直流电源转化为无刷电动机工作的低压交流电;(2)对无刷电动机起调速作用。
1.4 螺旋桨螺旋桨分为变距螺旋桨和定距螺旋桨[11]。
由于电动飞机任务单一、飞行速度跨度小,而且变距螺旋桨成本较大、结构较为复杂,因此,定距螺旋桨是电动飞机主要研究对象。
2 电推进系统选型与参数匹配设计过程电推进系统选型与参数匹配的过程见图2。
电推进系统选型与参数匹配具体过程如下:(1)根据飞机设计要求,计算飞机不同飞行状态下所需的最大功率;(2)以巡航状态下飞机所需的功率选择效率最高的螺旋桨,且满足飞机最大功率的要求,并确定不同飞行状态下螺旋桨的效率;(3)根据飞机最大功率需求,选取一组电动机,再根据螺旋桨设计转速下所需的功率,计算此状态下不同电动机的效率,选择效率最高的电动机;(4)根据电动机最大电流,选择控制器;(5)根据电动机所需的最大电流和飞行任务所需电池的容量,选取一组单体电池,然后不同的单体电池的额定电压求出所需电池数量,最后选择质量最轻的电池组;(6)根据所选产品得到对应的工作效率,验证匹配结果是否满足飞机设计要求,若不满足则需重新选型与参数确定。
图2 电推进系统选型与参数匹配流程图Fig.2 Flow chart of type selection and parametermatching of electric propulsion system3 电推进系统选型与参数匹配设计方法3.1 螺旋桨的选型与参数匹配对于电动飞机,续航时间是其设计的关键性能指标,所以以巡航状态作为定距螺旋桨的设计点。
螺旋桨的选型与参数匹配的流程图见图3。
3.1.1 巡航状态下需用功率的确定飞机巡航飞行时,升力等于重力,阻力等于推力,因此需用功率可表示为[11-12]式中:PVC为飞机巡航时所需的功率;WTO为飞机起飞总质量;g为重力加速度;VC为飞机巡航速度;(L/D)VC为飞机巡航时的升阻比。
通过对需用功率的计算,选择一组与需用功率接近的螺旋桨。
3.1.2 螺旋桨转速和功率的确定根据选择的一组螺旋桨,就可以确定螺旋桨的直径、翼型、螺距和桨叶数,选择螺旋桨最佳效率下的转速,根据螺旋桨功率计算公式求出螺旋桨可用功率[13]为式中:PP为螺旋桨可用功率;QP为螺旋桨最佳效率下的扭矩;nP为螺旋桨最佳效率下的转速。
图3 螺旋桨的选型与参数匹配的流程图Fig.3 Flow chart of type selection and parameter matching of propeller通过对螺旋桨可用功率的计算,并与飞机巡航时的需用功率进行比较,判断其是否满足要求且相对误差小于1%,若不满足要求,重新选择一组螺旋桨。
3.1.3 最大需用功率的确定(1)最大平飞速度对应的功率需求最大平飞速度时,飞机所受到的空气阻力与推力/拉力相等,最大平飞需求功率为式中:PP_vmax为最大平飞速度时所需的功率;(L/D)vmax为最大平飞速度时的升阻比;Vmax为最大平飞速度。
(2)爬升时间对应的功率需求爬升阶段,此过程包括起飞阶段的爬升过程,并看作爬升角不变且以某一平均速度爬升的匀速过程,因此所需的功率可表示为式中:tcl为爬升阶段所消耗的时间;PP_cl为爬升阶段所消耗的平均功率;α为爬升角;(L/D)cl为爬升阶段飞机升阻比;H为巡航高度为爬升阶段平均速度。
(3)起飞滑跑距离对应的功率需求起飞滑跑阶段,此过程近似看作匀加速过程,且最终速度为,因此起飞滑跑距离和所需功率可表示为式中:a为起飞滑跑阶段的加速度;STOR为起飞滑跑距离;PP_TO为起飞滑跑阶段所消耗的平均功率;为飞机离地速度;f为地面摩擦系数;ρ为空气密度;S为机翼面积;Cx_TO为起飞滑跑阶段飞机阻力系数;Cy_TO为起飞滑跑阶段升力系数。
螺旋桨的最大功率应该同时满足飞机对最大平飞速度、爬升时间及起飞滑跑距离的要求,对于不满足要求的螺旋桨,需重新选择。
对于定距螺旋桨,其效率是主要性能指标,因此选择多个满足要求的螺旋桨后,对其在飞机巡航状态下的效率进行比较,选择效率最高的螺旋桨。
3.1.4 螺旋桨效率与前进比的关系对于效率相接近的螺旋桨,可观察螺旋桨效率与前进比关系曲线峰值的过度情况进行选择。
图4为效率随前进比变化曲线[14],其关系式为式中:J为螺旋桨前进比,CT为拉力系数,CP为功率系数。
从图4中可以看出其中一条曲线可以在较宽的前进比范围内保持较高效率,即曲线峰值过渡平滑;而另一条曲线则过渡较为尖锐,这说明当它工作在最大效率时,可能轻微的气流扰动和变化就能使该螺旋桨效率下降。
所以对于效率相接近的螺旋桨,峰值过渡平缓的是更优的选择。
图4 螺旋桨效率曲线示意图Fig.4 Diagram of propeller efficiency curve3.2 电动机的选型与参数匹配电动机的选型与参数匹配的流程图见图5。
图5 电动机的选型与参数匹配的流程图Fig.5 Flow chart of type selection andparameter matching of motor3.2.1 电动机最大功率的确定电动机最大功率应该满足电动飞机所需的最大功率需求,但不应选择功率过大的电动机,因为电动机的体积和质量将随之增大。
电动机输出的最大功率应满足式中:PMmax为所需电动机的最大功率;Pmax为最大需用功率,取PPˆ_vmax,PP_cl和 PP_TO 中最大者为最大需用功率状态下的螺旋桨效率。
将计算出的功率值作为初步选择电动机最大功率的指标,这样选取一组满足最大功率需求的电动机。
3.2.2 巡航状态电动机输入与输出功率的确定由于电动飞机的续航能力是其设计的最关键性能指标,因此所选择的电动机必须保证飞机在巡航状态时电动机能在高效率区附近工作。
在巡航状态下,飞机所需电动机输出的功率为式中:PM_vc为飞机巡航时所需电动机的功率为飞机巡航时螺旋桨的效率。