血管的三维重建
血管的三维重建课件

m(:,:,b+1)=imread([int2str(b),'.bmp']); end
血管的三维重建
-10-
建模方法思想
需考虑的细节:
2)何谓边界点?
四邻域的概念 找边界点坐标的算法
血管的三维重建
-2-
Z=0
Z=49
Z=98
Z=1
Z=50
血管的三维重建
Z=99
-3-
假设
1)血管的表面是由半径固定、球心沿着某一曲 线(称为中轴线)的球滚动而形成的包络面。 2)中轴线上任两点处的法截面圆不相交。 3)管道中轴线与每张切片平面有且只有一个交 点。
血管的三维重建
-4-
图象的矩阵表示
后面的切片。
Z=57
Z=60
血管的三维重建
-22-
误差大的原因和改进途径
误差大的原因:
1)图象误差 实际图象边界上的点是连续的,在转换成
bmp图象时,象素表示的图象边界是离散的,成 锯齿状,与实际图象有误差(舍入误差)。 2)同一张切片上的最大内切圆不唯一
解决办法:
1)方法一:取平均 求出同一张切片上的所有最大内切圆的圆心,然 后求平均值。
问题重述
断面可用于了解生物组织、器官等的形态。例如,将 样本染色后切成厚约1m m的切片,在显微镜下观察该横断 面的组织形态结构。如果用切片机连续不断地将样本切成 数十、成百的平行切片, 可依次逐片观察。根据拍照并 采样得到的平行切片数字图象,运用计算机可重建组织、 器官等准确的三维形态。
假设某些血管可视为一类特殊的管道,该管道的表面是 由球心沿着某一曲线(称为中轴线)的球滚动包络而成。 例如圆柱就是这样一种管道,其中轴线为直线,由半径固 定的球滚动包络形成。
基于广义锥理论的血管三维重建方法
C r网易教育频道 :假设某些血 管可视为一类特殊的管 ON 道. 该管道 的表面是 由球心沿着某一曲线 ( 称为 中轴线 ) 的球滚动包络而成 。 例如 圆柱就是这样一种管道 . 其中轴 线 为直线 ,由半径固定的球 滚动包络形成 。 现有某管道 的相继 1O张平行切 片图像 .记录 了管 O 道与切片的交。 图像文件 名依 次为Obn 、 rp 9 rp 1bn 、 9 b ,格式均为 BM 宽 、高均 为 5 2 mp P. 1 个象 素 ( i 1。 px ) e 为简化起见 .假设 :管道 中轴线与每张切片 只有 一个交 点 :球半径 固定 :切 片间距 以及图像象素的尺寸均 为 1 。 取坐标系的z轴垂直于切片 . 1 第 张切片 为平面 Z 0 第 =, 1O O 张切片 为平面 Z 9 。Z Z 片图像 中象素 的坐标依 =9 = 切 它们在文件 中出现 的前后次序为
Vo. No 1 0 2 1 8 . 2 o
— . -
维普资讯
2 血管的三维重 建问题
血管 的三维重建是 医学图像处理领域一个传统的公
开问题 。 该问题如下形式 的描 述及图像来源于W W 1 3 W 6 .
3 1 广义锥理论 表示三维物体有一 种通用 的方法: 广义锥 。 它有 三 维空间的曲线 ( 表示三 维物体的轴线 )和一组正交于轴 的物体截 口的轮廓组成 。 广义锥有队下 三个 要素来表示:
( 5 , 5 .) 一5 . 5 , . ( 5 .5 ) 一 6- 6z , 2 6- 5z 2 2 ( 2 ) - 62 5z, 2 ( 5 2 6z , 2 5一5 ,) ( 5 .5 .) - 5-5 .) -5 . 5 ..2 52 5z, 2 ( 2 z - ( 5 . 5 ,)( 5 , 5 : … ( 5 ,5 ,) 一 5- 6z . 2 5- 5z 2 2 一 2 ) 一 52 5z. 2
数学建模血管的三维重建问题
A题血管的三维重建问题摘要:本论文讨论基于切片的血管三维重建问题。
其背景是:采取存储二维切片信息,使用时再利用切片信息重建原物体三维形态的方法,可以有效地保存和利用三维信息。
此技术在实际中有很大的用途,在医学和其他领域有广泛的应用。
如要将人体全部三维信息,包含内部错综复杂的结构,完整地存储在计算机中,以现在的技术也是有一定难度的,但若改用存储人体切片信息,使用时重建再现的方法,则是利用现有技术可以解决的。
本论文基于题中对血管形态的假设,建立管道中轴线参数方程,并综合考虑实际情况中由于切片厚度及数字图像离散化带来的偏差,通过在每张切片图像中搜索其中阴影区域所能包含的最大圆面,确定管半径为R=29,在此基础上,将每张切片图像中阴影区域所能包含的半径大于等于R的圆面圆心作为中轴线与各切片交点(即中心点)的候选点集合。
本模型使用了三种改进算法对该候选点集进行筛选以确定实际交点。
最终迭代算法简述如下:1.对每个切片,建立中心点的候选点集,并取点集的中位点为中心点初值2.利用得到的中心点建立中轴线方程3.利用中轴线方程推导导数信息,根据导数信息比例选取中心点的候选点集的某点作为中心点的新值4.重复步骤2、3,直至结果达到较稳定状态为止5.输出中心点及中轴线方程在模型建立中,对选取侯选点集、求中位点、利用导数信息进行比例选取均给出完整的算法,并且对半径确定、候选点选取、采用导数作为比例选取依据等问题给出详尽的证明。
考虑到实际血管的中轴线应充分光滑,计算最终中轴线参数表达式时采取了六阶多项式拟合。
最后用还原的血管形态模拟切片过程可以得到一系列数字图像,与原切片图像进行比较,可以检验模型的合理性及精度。
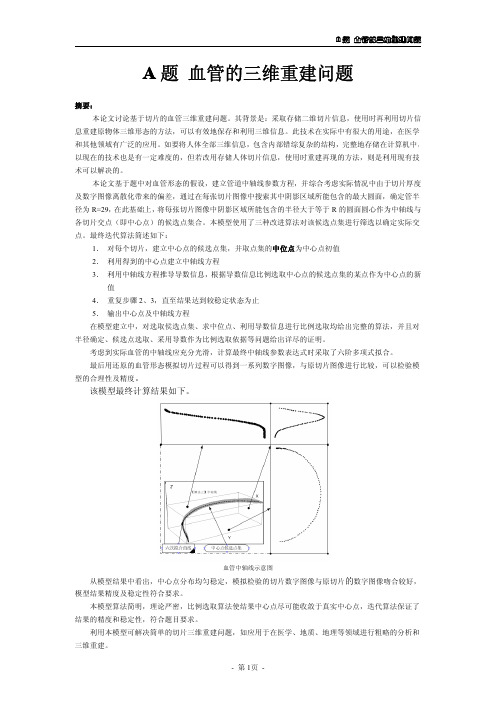
该模型最终计算结果如下。
血管中轴线示意图从模型结果中看出,中心点分布均匀稳定,模拟检验的切片数字图像与原切片的数字图像吻合较好,模型结果精度及稳定性符合要求。
本模型算法简明,理论严密,比例选取算法使结果中心点尽可能收敛于真实中心点,迭代算法保证了结果的精度和稳定性,符合题目要求。
三维血管的重建

血管的三维重建摘要对于血管的三维重建,本文研究了血管这一类特殊管道的中轴线及其半径的算法,绘制中轴线在XY 、YZ 、ZX 平面的投影图这些问题,问题分为三部分。
针对第一部分,先将100张切片图片在MATLAB 中导出生成0-1矩阵数据,在计算100张切片的最大内切圆半径及对应圆心坐标,为减小误差求100张切片最大内切圆的平均半径41666.29 d 。
中轴线的曲线方程可在MATLAB 中拟合得到。
针对第二部分,得到中轴线曲线方程在MATLAB 中绘制出中轴线方程的空间曲线,之后将其投影在XY 、YZ 、ZX 平面上。
针对第三部分,对100张切片进行叠加重合,得到血管的三维立体图,再通过MATLAB 对血管的三维立体图进行优化完成血管的三维重建。
关键词:MATLAB 软件管道半径中轴线曲线方程一、问题重述1.1基本情况断面可用于了解生物组织、器官等的形态。
如果用切片机连续不断地将样本切成数十、成百的平行切片,可依次逐片观察。
根据拍照并采样得到的平行切片数字图象,运用计算机可重建组织、器官等准确的三维形态。
1.2相关信息假设某些血管可视为一类特殊的管道,该管道的表面是由球心沿着某一曲线(称为中轴线)的球滚动包络而成。
现有某管道的相继100张平行切片图象,记录了管道与切片的交。
图象文件名依次为0.bmp、1.bmp、…、99.bmp,格式均为BMP,宽、高均为512个象素(pixel)。
取坐标系的Z轴垂直于切片,第1张切片为平面Z=0,第100张切片为平面Z=99。
Z=z切片图象中象素的坐标依它们在文件中出现的前后次序为(-256,-256,z),(-256,-255,z),…(-256,255,z),(-255,-256,z),(-255,-255,z),…(-255,255,z),……(255,-256,z),(255,-255,z),…(255,255,z)。
1.3提出的问题问题一:计算出管道的中轴线与半径,给出具体的算法。
脑血管三维重建技术(3D)在脑血管造影中的实际应用
Ce e r va c a n i g a h I r vi ss m er la ei or a in f rci cdig ossa h rpy r b o s ulra g o r p y.tp o de o eibl nf m to o l a n i ndt e a . ni
d fc a d o ew t a ue C n ls n T e e s n b e p l a o f j r a tr i v r e redme s n l e o s u t n(D) f ee t n n i fi r . o c i h ao a l a pi t n o o co s s e k yi t e — i n i a rc n t c o 3 o h l u o r c i ma f y nh o r i
Cli l pi t no he —i n in l e o srcin(D i C rbaA g ga h ic lai f redme so a R c n t t 3 ) ee rl n i rp y n aAp c o T u o n o D p r n o a io i l tre t nro fa i h rp C ne o ptlK lma i t,iin .3 0 0 C i e at t f d lgc ev ni , m o d tea y,e tr s i , ea yCi Xna g8 4 0 , hn me R o ai n o o r o H a y j a
基于MITK的血管三维重建
( C o l l e g e o f E l e c t r o n i c l n f o ml a t i o n a n d C o n t r o l E n g i n e e r i n g , B e i j i n g U n i v e r s i t y o f T e c h n o l o g y , B e i j i n g 1 0 0 1 2 4 ,C h i n a )
a n y a n g l e .c a n r e mo v e p a r l i a ]i r r e l e v a l i t v o x e J t o h e l p d o c t o r o b s e r v e t h e i n t e ua r l s t r u c t u r e a n d d e t a i l s o f v e s s e l c o n v e n i e n t l y .Be —
s i d e s .a d j u s t i n g t h e o p a c i t y o f t h J ’ e e - d i me n s i o n a l i m a g e C a l l o b t a i n c l e a r t h r e e — d i me n s i o n a l m o d e l o f v e s s e 1 .
效 果 不好 等 问题 , 基 于 MI T K平 台, 采 用 光 线投 射 算 法 对 二 维 超 声 图像 序 列 进 行 体 绘 制 三 维 重 建 。对
重 建模 型 进 行 旋 转 、 缩放 和任 意 平 面 裁 剪 等 交 互 操 作 , 裁 剪 掉 一部 分 无 关 体 素 , 有 助 于 医 生 观 察 血 管 的 内部 结 构 和 细 节信 息 。此 外 , 通 过 调 节体 素 的 阻光 度值 , 可 以得 到 层 次 清 晰 的 三 维血 管模 型 。
血管的三维重建数学建模
血管的三维重建数学建模
首先,血管的三维重建通常是通过医学影像学来实现的。
医学
影像学包括CT、MRI等技术,这些技术可以提供血管的断层扫描图像。
在这些图像的基础上,可以利用图像处理的方法,如边缘检测、分割等技术,来提取血管的形状和结构信息。
其次,几何建模是血管三维重建的关键环节。
在图像处理的基
础上,需要进行几何建模,将提取到的血管形状转化为数学模型。
这涉及到曲面重建、体素网格生成等技术,以及对血管内部结构的
建模。
另外,数学算法在血管三维重建中也起着重要作用。
例如,曲
面重建可以利用曲面拟合算法,体素网格生成可以利用体细胞自动
机等算法。
此外,对血管的分支、扭曲等特征的识别和建模也需要
借助数学算法来实现。
除此之外,血管的三维重建数学建模还涉及到计算机图形学、
计算几何学等领域的知识。
这些知识和技术的综合运用,可以实现
对血管形状、结构和特征的全面建模和重建。
总的来说,血管的三维重建数学建模是一个复杂而多样化的过程,涉及到多个学科和领域的知识。
通过综合运用图像处理、几何建模、数学算法等技术,可以实现对血管的全面、准确的三维重建和建模。
下腰椎前血管解剖形态的三维重建分析

下腰椎前血管解剖形态的三维重建分析目的:分析下腰椎前方血管走行特点,为下腰椎前路椎间融合术及微创手术提供解剖学依据。
方法:回顾性分析60例(男女各30例)腹部三维CT血管造影(3D-CTA )患者的影像,观察下腰椎前方血管在椎体前的走行特点,测量与腰椎前方血管位置相关的解剖学参数。
结果:三维CT重建图像发现腹主动脉分叉点变异较多,髂总静脉汇合点相对恒定。
腹主动脉分叉角男性(56.4±8.1)°,女性(61.9±8.7)°,髂总静脉汇合角男性(71.1±10.2)°,女性(77.7±11.31)°,腹主动脉分叉点到L5/S1间盘上缘的距离男性(3.39 ±1.02)cm ,女性(3.42±1.34)cm;髂总静脉汇合点到L5/S1间盘上缘的距离男性(1.71±0.76)cm,女性(1.90±1.15)cm;L5/S1椎间隙手术窗大小男性(3.07±0.85)cm ,女性(3.16±1.11)cm。
结论:下腰椎前方血管解剖位置具有多变性,以腹主动脉分叉点较为多见,术前行腰椎3D-CTA检查能明确血管解剖,可为微创手术提供影像学依据。
标签:下腰椎前血管;解剖形态;三维重建随着医疗技术的发展,脊柱前路手术的开展越来越普遍,其中通过腰椎前路行椎间融合术治疗下腰椎不稳、椎间盘源性腰痛等脊柱疾患应用广泛。
脊柱手术的微创化如腹部小切口和腹腔镜技术也成为趋势。
许多学者研究认为腰椎前路和小切口微创手术的主要困难和风险与椎前血管相关[1-4]。
术前确定椎前血管解剖结构有助于减少手术风险。
本研究旨在通过分析60例行腹部三维CT血管造影(3D-CTA)检查患者的三维影像,观察下腰椎前方血管位置及毗邻结构,以期为腰椎前路微创手术提供术前的解剖学影像评估依据。
1 资料与方法1.1 一般资料回顾性分析2008年1月-2009年7月在本院接受多层螺旋CT 检查,行腹部血管造影的60例患者的资料。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
血管的三维重建1 摘要序列图像的三维重建在各学科中都起到至关重要的作用,本次讨论的是血管的三维重建。
首先,假设该管道是由球心沿着某一曲面的球滚动包络而成,故本次的主要目的是求出中轴线坐标及半径。
现有100张平行切片图像,本次建立的模型可分为四步;第一步,采集图形边界点数据。
由于每张图片都是512*512的矩阵,故此数据很大,采用imread()函数将其读入矩阵A中。
第二步,最大内切圆寻找及半径的确定。
提出两种方案,分别是切线法和最大覆盖法; 从上述两种方法分析及考虑到我们所使用的工具和材料, 可以得出方法二更加直观, 计算机实现更容易, 计算复杂度更低, 所以我们采用后者。
根据以上算法, 我们抽取了所有的切片图进行半径的提取, 然后再求其平均值, 求其均值得到球的半径为29.6345。
第三步,轨迹的搜索。
在第二步中求出了血管的半径,轨迹的搜索就可以建立在半径确定的基础上, 当然我们也可以求出每一个切面图形的最大内切圆, 然后得到每个圆心的坐标, 即中轴线坐标, 但这样做计算机的运算量会很大, 同时由于最大内切圆搜索法的稳定性不高, 从而会造成搜索的不精确, 所以采用定半径搜索。
本文提出了三种方法, 分别为网格法、蒙特卡罗法和非线性规划法;本次采用非线性规划来实现。
第四步,绘制中轴线空间曲线图和在XOY、YOZ、XOZ 三个平面的投影图。
由定理1: 切片上血管截面图的头部顶点在XOY 平面上的投影点一定会落在中轴线在XOY 平面上的投影曲线上(在论文中以证明),并得出推论:切片上血管截面中中位线与中轴线在XOY 面上的投影重合。
最后可由中轴线和血管半径在作图软件中达到血管的三维重建,本次的模型还存在一定的不足,其假设为管道中轴线与每个切面有且只有一个交点,事实上还存在有多个交点的情况,但为了简化模型在此做了一定的假设,故会存在一定的误差。
关键词:三维重建内切圆半径轨迹(中轴线)注:求边界时采用了老师的思想和程序。
2 问题重述假设某些血管可视为一类特殊的管道,该管道的表面是由球心沿着某一曲线(称为中轴线)的球滚动包络而成。
例如圆柱就是这样一种管道,其中轴线为直线,由半径固定的球滚动包络形成。
现有某血管管道的相继100张平行切片图象,记录了管道与切片的交点。
图象文件名依次为0.bmp、1.bmp、…、99.bmp,格式均为BMP,宽、高均为512个象素(pixel)。
先假设:管道中轴线与每张切片有且只有一个交点;球半径固定;切片间距及图象象素的尺寸均为1。
取坐标系的Z轴垂直于切片,第1张切片为平面Z=0,第100张切片为平面Z=99。
Z=Z切片图象中象素的坐标依它们在文件中出现的前后次序为(—256,—256,Z ),(—256,—255,Z),…(—256,255,Z)(—255,—256,Z ),(—255,—255,Z),…(—255,255,Z)(255,—256,Z ),(255,—255,Z),…(255,255,Z)。
试计算管道的中轴线方程与半径,给出具体的算法,并绘制中轴线在XY、YZ、ZX平面的投影图。
全部图象请从网上下载。
关于BMP图象格式可参考:1.《VisualC+ +数字图象处理》第12页2.3.1节。
何斌等编著,人民邮电出版社,2001年4月。
2.http:///home/mxr/gfx/2d/BMP.txt3 模型的假设1.医学上, 血管不存在严重扭曲, 没有折皱。
2.血管可视为等径管道。
3.管道中轴线与每张切片有且只有一个交点。
4.切片间距以及图象象素的尺寸均为1。
5.对切片拍照的过程中不存在误差,数据误差仅与切片数字图象的分辨率有关。
6.血管的表面是由半径固定的球的球心沿着某一曲线( 称为中轴线) 滚动包络而成。
7.切片足够薄, 其厚度对计算的影响可以忽略不计。
8.切片包含的其它圆的半径一定小于r。
9.不能被切片包含的圆的半径一定大于r。
4 符号说明X 血管的最大内切圆的圆心的x的坐标值Y 血管的最大内切圆的圆心的y的坐标值Z 血管的最大内切圆的圆心的z的坐标值R 血管最大内切圆的的半径R血管最大内切圆整个圆周的离散坐标ijA 图像数据储存的三维矩阵f R血管最大内切圆心匹配点数的函数()ij5 分析与建立模型5.1 分析1)假定管道中轴线与每张切片有且只有一个交点, 球的半径固定, 切片的间距以及图像象素的尺寸均为1。
取坐标的z轴垂直于切片, 第一张切片记为平面z = 0, 第二张切片记为z = 1, 第100张切片的平面记为z = 99。
要求根据以上所给条件计算管道的中轴线与半径, 并绘制中轴线在X Y、YZ、ZX 平面的投影图。
5.2 几个重要的结论对于某个切痕,可以作出它在空间中的结构图。
如图1所示,设某一切片的切痕与中轴线的交点为O,切下这一切痕的同时也截下中心在点O 的小球的一个大圆K,过点O 的血管的轴截面S也是同一个小球的一个大圆。
这两个大圆的交点即为小球的直径的两个端点,且这两个端点为切痕边界与大圆K 的两个切点,因此可得出以下结论:1)每一个切痕中存在一个最大内切圆且最大内切圆的圆心在管道的中轴线上。
2)每个切痕的最大内切圆的半径均相等, 且等于管道的半径。
根据上面的结论,要求血管的中轴线,只需找出每一个切痕的最大内切圆的圆心。
图1 某个切痕的空间结构图5.3 模型的建立通过对血管的三维重现的分析可知, 我们的模型应由三部分组成:5.3.1 采集图形边界点数据边界点数据的采集方法有人工采集法和计算机采集法, 对于数据量较小的,又具有某些特殊意义的点可以由人工采集, 若数量比较大且采集边界又非常复杂时, 则采取机器采集。
5.3.2 最大内切圆寻找及半径的确定方法1 切线法此方法可以从切面的外围轮廓线分析着手。
由题意分析知道, 所给的图片切面是由无数个球切面组成的。
而且外围轮廓线与最大内切圆有且仅有两个交点, 所以经过这两点的外围轮廓线的两条切线平行且间距最大。
基于上述分析, 我们可以通过找到这两条切线来找到最大内切圆的圆心及半径。
在实际操作中, 由于对图片的象素提取的离散性, 我们在计算导数时是用差分来代替。
方法2 最大覆盖法最大覆盖法就是在切面中找到最佳的圆心位置和半径长度, 从而使得由这个圆心和半径所决定的圆面, 能最大面积地覆盖管道切面的图形, 这样搜索到的圆一定是最大内切圆, 这个圆的圆心就是我们所要找的球的球心, 这个圆的半径就是我们所要找的球的半径。
从上述两种方法分析及考虑到我们所使用的工具和材料, 可以得出方法二更加直观, 计算机实现更容易, 计算复杂度更低, 所以我们采用后者。
具体实现中, 我们先得到任意一张图片的象素矩阵, 然后将用于匹配的圆根据其圆心和半径将其圆周离散( 即以象素表示) , 并映射到512⨯的图中, 其中圆周上的点为0, 其余的点为1, 即形成另一个象素矩512512⨯两个矩阵在相同位置点上的值进行逻辑或运算, 如果其值为0, 阵。
这512则为匹配点, 即此点在管道切面图形内, 否则其在切面图形外。
这样搜索到的匹配点最多同时半径最大的就是所要找的最大内切圆。
图2和图3 就是分别从图1. bmp 和图89. bmp 搜索到的最大匹配圆( 内部白色部位为管道切面图形, 深色圈为最大匹配圆) 。
根据以上算法, 我们抽取了所有的切片图进行半径的提取, 然后再求其平均值, 求其均值得到球的半径为29.6354。
图2 1. bmp 的最大匹配图图3 89. bmp 的最大匹配图5.3.3 轨迹的搜索5.3.3.1 目标函数的确立在求出半径以后, 轨迹的搜索就可以建立在半径确定的基础上, 当然我们也可以求出每一个切面图形的最大内切圆, 然后得到每个圆心的坐标, 即中轴线坐标, 但这样做计算机的运算量会很大, 同时由于最大内切圆搜索法的稳定性不高, 从而会造成搜索的不精确, 所以采用定半径搜索。
我们通过定圆( 半径为R ) 来找其中轴线, 也就是用定圆覆盖到切面图形上去, 找到匹配点数最多的一个位置, 从而得到此定圆圆心的位置。
具体实现时只要用定圆的圆心位置进行变化, 设其为(,)A x y , 则由A 点可以得到整个圆周的离散坐标ij R , 令()ij f R 为匹配点数的函数, 其计算方法与最大内切圆求法相同, 即将ij R 根据圆心A 的坐标和半径R ( 固定) 离散化形成矩阵后和切面图形矩阵作逻辑与操作, 从达到匹配最大, 则优化目标函数就是:max[()]ij f R (512512)A ∈⨯坐标面上的点5.3.3.2 目标函数要求求出一点圆心A , 使得定圆覆盖切面图形最大, 即多元函数极值最优解, 这是一个以X 和Y 为自变量二元函数, 这样可以通过以下三种方法来求得:1) 用直接搜索求最优解( 网格法)搜索过程中, 对每一个圆心的坐标X 和Y , 在其取值的范围内均取100 个步长, 分为1002个网格, 这样, 在一定的精度范围内, 可以求的一个较好的最优解。
2) 蒙特卡罗法蒙特卡罗法, 也就是随机实验试点法。
它的基本思想是: 在函数的可行域内随机地选取实验点, 由于随机取得的点在区域中分配比较均匀, 所以对函数的大致形态能较好的体现。
模型中, 随机点用以下方法产生的。
0(10)(1)x x x x rand =+-⨯ 0(10)(1)y y y y rand =+-⨯其中, ( x0, x1) 为X 的取值范围, ( y0, y1) 为Y 的取值范围。
3) 非线性规划非线性规划即无约束优化,以数值迭代为基本思想,基本步骤为选取初值A(X0,Y0),进行k 次迭代并求出迭代解,由迭代解得到搜索方向和步长,如果k + 1次迭代符合给定的迭代终止条件,则停止迭代,得出最优解;否则继续迭代。
非线性规划的关键是搜索方向、步长和初值。
我们用拟牛顿法来选定搜索方向,拟牛顿法是在牛顿法基础上,克服牛顿法中黑赛阵不仅计算复杂、而且会出现变态、不正定等情况,同时保持了较快收敛的优点,从而得到最好的下降方向。
搜索步长的确定使用线性搜索的方法,或更为有效的插值方法。
由于此搜索程序的初值对于程序正确有效的搜索影响很大,又因为相邻的切片只有一个象素单位的距离, 可以认为中轴线的变化很小,所以我们可以把前一次确定的球心作为下一次搜索的起点,从而大大提高搜索的效率和准确性。
但由于转角处变化较大,在这种情况下搜索起点会郴够逼近而导致优化搜索的失效。
我们采用回溯技术来避免这种现象。
即当球心间距前后相差较大时( 采用工程上的观点, 以6 倍为基线),回退一次搜索,并以当前球心作为回退搜索的起点,这样就可以把各个球心间距变得比较匀称,从而相应的消除了转角上的搜索失效。
从上述对三种方法的分析可以得到网格法和蒙特卡罗法实现思路简单, 程序容易实现,但网格法搜索的精度不高, 误差较大,搜索时间长,同样蒙特卡罗法的实现对采点的数目要求很高,计算量大; 非线性规划法的实现复杂,但搜索速度快,计算量少,而且通过MATLAB 的优化工具箱的函数可以很方便地实现,所以非线性规划法较优。