frsky 睿斯凯X9D设置说明 使用说明介绍模板之欧阳家百创编
FrSky R9M 2019遥控系统说明书

A pre-flight range check should be done before each flying session. Reflections from nearby metal fences, concrete buildings or trees can cause loss of signal both during range check and during the flight. Normally ,the RSSI is about 45-50 at 150m in range check 1. Place the model at least 60cm (two feet) above non-metal contaminated ground (e.g on a wooden bench). The receiver antenna 2. For Taranis X9D Plus 2019 as an example, turn on the transmitter and the receiver, go to: MODEL/SETUP/External RF Mode R9M 3. For Horus X10 Express as an example, turn on the transmitter and the receiver, go to: MDL/RF SYSTEM/External RF (ON)/STATE SMA Connector SMA Connector868MHz (EU)915MHz (Non-EU)+X +Y+Z+X +Y+ZA pre-flight range check should be done before each flying session. Reflections from nearby metal fences, concrete buildings or treescan cause loss of signal both during range check and during the flight. Normally ,the RSSI is about 45-50 at 150m in range check 1. Place the model at least 60cm (two feet) above non-metal contaminated ground (e.g on a wooden bench). The receiver antenna 2. For Taranis X9D Plus 2019 as an example, turn on the transmitter and the receiver, go to: MODEL/SETUP/External RF Mode R9M 2. The receiver should be rebound after switching the modes between Telemetry (25mW) and No Telemetry (200mW/SMA Connector SMA Connector868MHz (EU)915MHz (Non-EU)+X +Y+Z+X +Y+Z。
思拓力RTK操作流程
北半球测绘仪器有限思拓力S9/S6系列RTK软件操作流程呼和浩特市北半球测绘仪器有限公司思拓力RTK操作步骤一.新建工程P7手簿采用的Moble的系统,开机的系统界面如下图:我们点击开始菜单,在开始菜单的列表里选择我们的手簿软件SurPad2.0,如下图:打开软件后点击-新建,如下图:输入新建工程名称,默认的是手簿系统时间,输入时点击会切换出软件盘,也可以用键盘输入,输入完成后点对勾点确定:确定之后会来到我们连接仪器的界面如下图:仪器型号选择S9/S6,点击蓝牙如下图:如果手簿里有你的仪器号和对应的COM 口这直接选择并点确定,如果没有那么我们需要给手簿配置一下蓝牙,点击“配置蓝牙设备”如下图:点击添加新设备,让手簿搜索你的主机蓝牙号,如下图:图:软件提示已建立连接,点击完成,如下图:点击端口选项,为主机蓝牙配置端口,如下图:点击新建端口,选中我们的主机号,点击下一步,如下图:用的端口,如下图:图:然后点击连接,手簿开始连接仪器,如下图:工程的坐标系统参数的界面,如下图:在这里我们首先设置椭球参数,点击椭球参数,在下拉列表里选择你控制点坐标系统的椭球,如国家80,如下图:选择好后点击确定,然后设置投影参数,点击投影参数,在下拉列表里选择你的投影方式,一般为高斯投影,这里没有六度和三度之分,高斯投影已涵盖了。
然后设置你的中央子午线经度,如果知道直接输入,如果你是三度带的话,不知道当地的中央子午线,点击旁边的A,软件会自动算出并添加(这里是指手簿连上仪器,并且仪器应经锁定卫星的情况),六度带和自定义只能自己添加了,如下图:点击确定,在点击确定,然后选择工程测量,点击关闭,如下图:到这里,新建工程,就建好了,如果你是提前建工程的话,那么连接仪器就可以省略了,出来设置仪器的时候在进行连接,在通讯设置里连接就可以了。
二.设置仪器(一)基准站设置手簿连上基准站后,点击仪器,选择工作模式如下图:在工作模式里选择基准站模式设置,如下图:在这里挨个设置就可以了,设置启动模式设置,这里选择使用单点坐标,基站ID可以不输入,其他按默认设置就行,开机自动启动选中,最后点确定,如下图:然后设置选项设置,选项设置里差分模式一般选择RTCM30和CMR,启用Glonass和启用北斗都√上,(这里要注意三星仪器的话,只有选择CMR才有三星效果)高度截止角0-45度都行,一般建议5-15度任意选择。
睿思凯 FrSky D8R (V2) 接收机说明书

睿思凯FrSky D8R (V2) 接收机说明书1. 介绍1.1 兼容性:兼容睿思凯FrSky双向模块:DFT, DJT, DHT, DHT-U1.2 规格:体积: 54*27*17mm重量: 16.2g工作电压范围: 3.5V-10.0V工作电流: 100mA有效距离: 1.5km分辨率: 3072 (>11bit)帧率: 18ms (FS)9ms (HS)1.3 比起D8R的优越性:1) 在 A1中内置电池电压传感器;2) 两个可切换的PPM模式: FS模式 和 HS 模式;3) 升级时不需打开接收机外壳.2. 安装2.1对码过程:a)打开控并切换到PPM模式,关闭控。
b)按住发射模块上的F/S 按钮同时打开控(请确保发射模块上的双向模式两个开关都是关闭的)。
放开几秒钟, 发射模块上的红灯将闪烁, 指示控准备与接收机对码。
c)当按下接收机上F/S按钮的时候把电池连接到接收机。
接收机上灯将闪烁,指示对码完成。
d)打开控并连电池到接收机。
接收机上的绿灯亮指示接收机在接收控上发出的信号。
警告: 请确保电源是插在第1到第8通道的,而不是侧孔 (A2或者Rx), 否则舵机将不工作2.2距离检测:强烈建议在飞行前进行距离检测,当模型在金属篱笆,混凝土建筑,或者整排的树内飞行的时候一定要小心。
如果操控的话,你可能会受到未知的干扰。
请按照如下步骤进行距离检查操作(注:此操作要求接收机装在模型上进行)。
1)把模型放置在高于非金属污染土地最少两英寸(60cm)的地方,例如木质长凳。
2)把接收机天线水平放置。
不要让天线接触碰到地面。
3)把发射模块天线放置在垂直的位置。
4)打开发射机和接收机,然后按住发射模块上的“F/S Range”按钮4 秒,发射模块的红色LED 将变为绿色的,这时,发射模块功率将降至正常值的1/1000, 因此有效距离也将相应地减少到正常值的30分之一,只有30 多米。
5)一个人在控制遥控器的同时进行操作的同时,慢慢步行离开模型,让另一个助手看着模型已确认所有操作正常。
锋麦 4S说明书

4.4 何时需要更改启动模式.................................................................................................................................................
3.2 将电脑停止...................................................................................................................................................................... 3.3 键盘功能..........................................................................................................................................................................
x9dplus说明书

X9D PLUS 中文说明书1 遥控器菜单设置1.1 主画面1.1.1 主画面第一页开机后首先看到的就是主画面,主画面有四页,通过按遥控器MENU进行循环切换。
下面是首页的说明,说明顺序按照从遥控器屏幕的最上方到最下方。
7.6v遥控器电池电压,X9D使用6节镍氢电池小电池图标遥控器电池电量图标,显示电量剩余量。
->设置电量图标范围喇叭图标遥控器喇叭总音量。
->设置音量07:10当前时间。
->设置时间MODEL01模型名字 ->模型名字SA↑ SE ↑当前遥控器开关状态,例如SA↑表示SA开关拨到上方,SA-表示SA开关拨到中间等。
开关共有8个,SA-SH,其中SF为2档开关,SH为弹簧开关,其余均为三档开关。
开关的可以自定义,默认没有任何功能,开关可以用来直接控制舵面,如收放起落架,也可以定义为其他功能,比如改变飞行模式,调整大小舵,重设秒表,语音播报回传电压值,锁定油门…等等。
图片此处是您的模型的图片,可以在此处进行设置左右两侧较粗的竖条当前遥控器旋钮状态(左上:S1 右上:S2 左下:LS 右下:RS)。
旋钮的功能是自定义的,默认没有任何功能。
旋钮可以用来直接控制舵面,比如控制襟翼开启角度,也可以定义为其他功能,比如控制音量,控制方向舵-副翼混控比例,微调前起落架方向与方向舵混控的角度…等等左右和下方较细的竖条微调位置。
分别对应摇杆四个方向的微调。
[右方秒表]如果设置了秒表,在主画面右方会看见秒表,可以在此处进行设置1.1.2 主画面第二页在主画面第一页按PAGE进入主画面第二页,左右多出两个方框用来显示当前左右摇杆的位置,并且省略了秒表的显示。
其余与主画面第一页相同。
1.1.3 主画面第三页在主画面第二页按PAGE进入主画面第三页,右侧多出了一些下划线,用来显示LS1-LS32虚拟开关位置,当虚拟开关打开时,下划线会显示为竖条。
->虚拟开关。
并且省略了秒表的显示。
富斯9遥控详细说明
富斯九通遥控器详细说明富斯fs-th9x 如何而设置混空?在SYSTEM----------STICK SET里面可以设置1-4通道的定义开关作用:从后向前,从左到右依次是油门保护(熄火开关了)丶方向舵大小丶升降舵大小丶三段开关丶副翼大小丶起落架丶计时开关(教练开关)。
混控要看想达到什么效果?我现在会了-----油门和方向舵丶三段开关+混控=控制飞控的开启\关闭\锁定丶副翼和方向舵等等。
你表达的混控意图没看明白。
MENU-->FUNC SETTING-->PROG.MIX-->MENU-->设置混控具体内容1)混控程序1~5控制项比较多,5~7比较简单2)混控开关SW-->ID0 ID1 ID2这里对每一段设置,逐段保存。
但,具体指哪个三段开关,一共有几个三段开关。
我没实物无法知道。
可能就一个吧。
昨天上YouTube看了老外用turnigy9x 可以实现6种飞行模式但是同样的设置fs-th9x就不能。
研究半天发现fs-th9x仅能实现1-4通道混控其他通道。
超过就不行,比如5混6或者说GYR混控FLP 就不行。
奇怪的是turnigy 9x 的菜单和外观和FS-TH9X都一模一样,这个两者是什么关系?最终利用直升机模式里面的pitch 曲线实现了3段飞行模式福斯FS-TH9X遥控器开机出现SWITCHERROR!是怎么了把遥控上面的切换开关全部靠后拨就解除锁定了FS-th9x富斯九通遥控Reverse:正反设置Thr/cv:油门曲线Pit/cv:螺距曲线Subtrim:辅助微调End point:舵角调整Throcut:关闭油门Aux-ch:辅助通道(为CH5-CH8选择输入源)Swashmix:倾斜盘D/r&exp:副翼、方向、动作、大小调整及敏感度Trim:微调杆Timer:计时器Revo/cv:反扭力曲线Failsaf: 安全模式Hov thr:停熄油门Hov pit:停熄螺距Trainer:教练模式Display:输出显示模拟Gyrosens:陀螺仪混控Stnttrbo:空中微调Prog(123):混控程式Flaperon:副翼襟翼混控FS-TH9X常见问题下载地址:/share/link?shareid=131147094&uk=2587084726FS-TH9X遥控器中文说明书下载地址:/share/link?shareid=484759&uk=119968564一、遥控器恢复出厂设置操作:1、遥控器关机状态按住EXIT键不要松开,再打开电源,显示屏将会出现RESTORE。
FrSky TANDEM X20 HD 使用说明书
With ETHOS Suite, you can update the radio bootloader, firmware, SD card, flash, and also convert image format and audio format. Find the latest infomation and download the ETHOS Suite at /.ETHOS SuiteNote: To use the ETHOS Suite application with a FrSky radio, please always keep the radio bootloader with the latest version.How to upgrade firmware for the video receiver module3221Make sure the HD radio is connected to the [ETHOS Suite] program.Enter the [FRSK Flasher] tool and move to the [HD Video Component] tab;Click the [Flash] button of the corresponding radio model to upgrade the firmware. 312V1V2V1V2FrSkyElectronicCo.,Contactus:******************Add:F-4,BuildingC,ZhongxiuTechnologyPark,No.3YuanxiRoad,Wuxi,214125,Jiangsu,ChinaTechnicalSupport:********************FrSkyElectronicCo.,Contactus:******************Add:F-4,BuildingC,ZhongxiuTechnologyPark,No.3YuanxiRoad,Wuxi,214125,Jiangsu,ChinaTechnicalSupport:******************** S TEP2: Channel Range SettingTD-ISRM Internal RF module supports 24 channels(CH1-8 / CH1-16 / CH1-24).The channel range is configurable by pressing thechannel bars, please also make sure of the channelconfiguration before using the module.STEP3: Model ID SettingThe system assigns the receiver a number for thereceiver (Model ID) automatically while creating a newmodel. ( The Model ID can be set from 00 to 63, withthe default ID being 1.)FrSky TANDEM X20 HD (UpKit) ManualNote:● If the failsafe is not set, the model will always work with the last working status before the signal islost. That could cause potential damage.● When the failsafe is disabled on the RF module side, the failsafe set on the receiver side will beapplied.● SBUS port does not support the failsafe setting in No Pulses mode and always outputs signal.Please set "Hold" or "Custom" mode for the SBUS port.There are 3 failsafe modes when the setting is enabled: No Pulse, Hold, and Custom mode.● No Pulses Mode: On loss of signal, the receiver produces no pulses on any channel. To use this mode, select it in the menu and wait 9 seconds for the failsafe to take effect.● Hold Mode: The receiver continues to output the last positions before the signal was lost. To use this mode, select it in the menu and wait 9 seconds for the failsafe to take effect.● Custom Mode: Pre-set to required positions on the lost signal. Move the cursor to the failsafe mode of thechannel and press Encoder, then choose the Custom mode. Move the cursor to the channel you want to set How to set FailsafeA pre-flight range check should be done before every flight, in case the signal loss is caused by the reflection of the signal by the nearby metal fence or concrete, and the shading of the signal by buildings or trees during the actual flight. Under normal circumstances, in Range Check mode, the RSSI at 150m is about 45-50.1. Place the model at least 60 cm (2 feet) above the non-metal contaminated ground (such as on a wooden bench). The receiving antenna should be in a vertical position.2. Ener the ETHOS system, move to the "RF System", scroll the Encoder to select "RANGE" mode andEncoder. In range check mode, the effective distance will be decreased to 1/30.Range CheckSTEP4: RegistrationFor TD Mode as an example, select the Set [Register] for getting the radio into Registration status in the RF System-Internal Module tool, then press the F/S button on the receiver and power the receiver on.When the "RX Connected" page pops up, press the [REGISTER] to complete the Registration procedure and then power the receiver off.(The system automatically assigns the receiver a UID differently in the same model when you have several receivers to bind at the same time.)STEP6: RF Power SettingThe TD-ISRM internal RF Module can offer multiple RF power options which can achieve a further controlling range. Open the Power menu bar and select the desired power level according to usage.STEP5: Automatic Binding (Smart Match)Move the cursor to RX1 [BIND], press it and repower the receiver.Click the RX to complete the binding after the receiver window pops up, the system will confirm "Bind succeed".Reset: Registration procedure is not requiredto repeat anymore after the receiver was once registered even though the receiver is deleted. Pressing the [Reset] and repower the receiver can have the bound recovered.Version1.0FrSky TANDEM X20 HD (UpKit) Manual Then turn the state of Internal RF to On. Set the binding mode for the Internal RF module correspond-ing to the receiver (ACCST D16, ACCESS, TD MODE).Model Setup Procedure - Internal Module STEP1: Enable RF ModuleEnter the RF system menu by the touch-screen or use the navigation encoder key. Choose the Internal Module.STEP 2:Configure the model the model and set the model picture. Enter into Model Select, then select the model type.Create a new model.。
frsky睿斯凯X9D设置说明使用说明书
睿思凯X9D设置说明希望这个也兼容PLUS;由于此控为开源,固件不断更新,设置也有所不同。
请使用者根据固件版本的不同,请选择性使用!!!另外此文在整理中难免有误,请模友们多多指教,最好将修改后的版本上传,以便共享。
1.开控,插上usb ,控的tf卡就是一个U盘了,里面有一个文件夹叫sounds,就是语音文件。
在群共享里有中文语音包下载后把tf卡里的en文件夹覆盖就可以中文发声了。
建议覆盖前把tf卡里的数据备份,万一哪天要恢复。
2.只要支持ppm型号的外置高频头全都能兼容,但一定要与其配套的接收机一同使用。
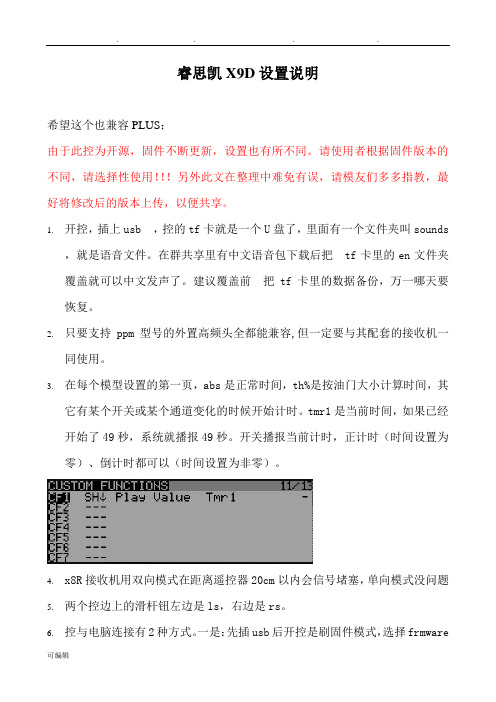
3.在每个模型设置的第一页,abs是正常时间,th%是按油门大小计算时间,其它有某个开关或某个通道变化的时候开始计时。
tmr1是当前时间,如果已经开始了49秒,系统就播报49秒。
开关播报当前计时,正计时(时间设置为零)、倒计时都可以(时间设置为非零)。
4.x8R接收机用双向模式在距离遥控器20cm以内会信号堵塞,单向模式没问题5.两个控边上的滑杆钮左边是ls,右边是rs。
6.控与电脑连接有2种方式。
一是:先插usb后开控是刷固件模式,选择frmware为frsky,然后读写控。
二是:先开控再插usb是模型设置模式。
第一种方式不能读取参数及设置模型。
不用原厂固件的话,得装驱动,就可以随便刷最新版本的固件了。
现在OPENTX固件是2940版本。
7.舵角的正反修改是这里,改成inv就是反向了。
ccpm舵机的正反设置可以在第二个页面选择三个混控通道的正反向。
如果三个舵机里有一个反了,在这里设置,如果整体混控反了,在这里设置。
下面的三个选项是设置混后的整体正反向的。
8.摇杆曲线就是让摇杆的操作更柔顺一些。
看这里比较直观一些,摇杆靠近中点的时候会顺滑。
9.012345678 是每个模型设置的8个状态,可以修改每个状态的中点、偏移、舵量等,可以在一个模型设置里放8个不同的飞机或8个相同类型的飞机,比如两架固定翼,可以用0 和1 分开设置,飞机A,在装配调试的时候副翼中点要偏移一点,但是飞机B不用偏移,设置好后选择0就飞A飞机,选择1就飞B飞机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
睿思凯X9D设置说明欧阳家百(2021.03.07)希望这个也兼容PLUS;由于此控为开源,固件不断更新,设置也有所不同。
请使用者根据固件版本的不同,请选择性使用!!!另外此文在整理中难免有误,请模友们多多指教,最好将修改后的版本上传,以便共享。
1.开控,插上usb ,控的tf卡就是一个U盘了,里面有一个文件夹叫sounds,就是语音文件。
在群共享里有中文语音包下载后把 tf卡里的en文件夹覆盖就可以中文发声了。
建议覆盖前把tf卡里的数据备份,万一哪天要恢复。
2.只要支持ppm型号的外置高频头全都能兼容,但一定要与其配套的接收机一同使用。
3.在每个模型设置的第一页,abs是正常时间,th%是按油门大小计算时间,其它有某个开关或某个通道变化的时候开始计时。
tmr1是当前时间,如果已经开始了49秒,系统就播报49秒。
开关播报当前计时,正计时(时间设置为零)、倒计时都可以(时间设置为非零)。
4.x8R接收机用双向模式在距离遥控器20cm以内会信号堵塞,单向模式没问题5.两个控边上的滑杆钮左边是ls,右边是rs。
6.控与电脑连接有2种方式。
一是:先插usb后开控是刷固件模式,选择frmware为frsky,然后读写控。
二是:先开控再插usb是模型设置模式。
第一种方式不能读取参数及设置模型。
不用原厂固件的话,得装驱动,就可以随便刷最新版本的固件了。
现在OPENTX固件是2940版本。
7.舵角的正反修改是这里,改成inv就是反向了。
ccpm舵机的正反设置可以在第二个页面选择三个混控通道的正反向。
如果三个舵机里有一个反了,在这里设置,如果整体混控反了,在这里设置。
下面的三个选项是设置混后的整体正反向的。
8.摇杆曲线就是让摇杆的操作更柔顺一些。
看这里比较直观一些,摇杆靠近中点的时候会顺滑。
9.012345678 是每个模型设置的8个状态,可以修改每个状态的中点、偏移、舵量等,可以在一个模型设置里放8个不同的飞机或8个相同类型的飞机,比如两架固定翼,可以用0和1分开设置,飞机A,在装配调试的时候副翼中点要偏移一点,但是飞机B不用偏移,设置好后选择0就飞A飞机,选择1就飞B飞机。
0-8就是9套参数,可以给一个飞机定义9套参数,也可以每套参数对应一个飞机。
10.要改手就选择那个 reta aetr ater arte等等。
11.x9d在菜单翻页长按翻页键是倒退。
12.frsky是自己的制式。
13.在5通道上设置控制原为sa,三段数据分别为-100,0,100三轴飞控的开关,就改一个选项即可。
14.双向接收机不用接任何设备就可以回传接收机的电压,遥控器可以看很多信息的,有三个页面可以自定义显示,每个页面能显示好几种,用过opentx和er9x一模一样的,就是增加了写功能。
15.X9D用的是opentx修改版。
opentx用的就是er9x的源码,其实就是在er9x上扩展的。
对fs9也可以刷opentx,操作完全一样,但更强大,自定义功能增加了可编程的部分。
遥控器关机状态插上usb才能刷固件,开机状态插上usb可以用compainon9x设置遥控器的各项功能(很方便)。
16.eepe是设置er9x的,companion9x是设置opentx的,用法都是一样的。
17.说明书上就一个词 reserved,预留的口,目前功能未知,frsky双工协议说明,用于链接第三方遥测设备,电池接在左边电池口上的。
上传的这个" FRSKY TELEMETRY PROTOCOL.PDF"文档是 frsky djt和dft外置模块的串口数据说明,可以用来接别的遥测设备,可以把另外的发射端数据由这个串口输入到遥控器显示。
18.桔子高频头直接可以插在x9d上,fs9也可以直接插,jr的高频头可以直接插。
支持dsmx和dsm2协议,可以用便宜的dsm2接收机。
19.最底下和横道,就是状态栏的数字就是信号,在range test 状态显示的大数字,如果是正常模式,救灾屏幕最底下反色的横条里是信号强度。
可以把它自定义在显示页面里,有3个自定义页面可以设置。
要看电池电压必须外接电压传感器,也可以自己做。
电池输出并接一个传感器,或者直接在平衡口接传感20.X9D最高能到16通。
x8r是专门针对最新的d16协议模式的。
轻型的D4R-II,支持1-8通 cppm输出subs。
X9d原配内置一个16通道高频头,外置空的,可以再加一个外置高频头组成32通道。
也可以插其它厂家的高频模块。
内置和外置的高频都可以选择打开或关闭,下图是用DSM2高频头。
也就是可以用JR接收机和DX系列的。
21.遥控器上有语音播报,信号差的时候或者电压低的时候会有语音提示,如果外接传感器,可以播报电池电压、高度、速度、转速、温度……等一切可以监测的数据。
有飞行正计时、倒计时播报功能,按油门大小比例计时功能。
对,除了不能直接图传,数据的双向传输都是可以实现的。
22.电压传感器加一个HUB,可以传回的是动力电池的总电压和单节锂电池的每一节电压,而且你在控上可以设置一下最低单节电池的电压报警,低于这个值(比如设置 3.7V),那么当3S 或6S电池中当任一一节电池的电压低于 3.7V时,控就报警了。
23.回传是回传,显示是显示。
如果FS刷OPENTX或OPEN9X,用XJT高频头,数据能回传回来,但你如果不另加一个FRSKY的外接显示屏,数据是传回来了,但你显示不出来,看不到。
24.按一下ent键对频,再按一下停止25.下图是X9D的外接高频头引线定义:26.X9D有一个ppm选项开关,选一下正反向就可以了。
每个模型的参数都可以设置单独的ppm的正反向。
27.用开关设置油门开关:28.在混控中设置油门开关:油门是几通道就选SafetyCH(通道数)29.接收机D8R-II,A2口在侧面,供电和电压数据是插在两个口上的,注意看侧面插错烧接收机。
用proteus模拟这个小电路,输出电压是 3.12632。
最大3s换4种电阻的开关电路可以支持3-6s。
3s是三节锂电串联11.1V,6s是6节锂电串联22.2V。
就按这个做,支持3-6s 的电压传感器,用开关选择电池类型30.16通道ppm输出要30几ms才行。
sbus的数据,不清楚。
sbus官方没提供数据d4fr接收机说明里的图,cppm输出18ms,sbus应该更快吧。
18ms是所有通道信号输出一次的时间。
这个操作遥控杆到舵机动作,其中还有舵机自己的延时呢,普通舵机都是200ms,所以遥控器的输出怎么都比舵机块十倍。
就是最快的锁尾舵机0.09s也要90ms。
所以再快的遥控,操作时,舵机都会慢半拍的。
所以想打舵时舵机立即反应,估计目前没可能,遥控->接收->舵机,只有舵机的速度能感觉到,遥控和接收机通讯的速度人类是感觉不到的。
31.高频头有internal RF(内置) External RF(外置)和master/slave 三个选项,内外都可以关。
当使用外置高频头时,就把内置高频头关了外置ppm1-8。
32.打开教练开关主控机就会关闭3.5口的ppm输入。
33.现在长按menu键,然后按page翻页,翻到最后一页校准,校准方法和模拟器一样,先中立,然后最大化移动遥控杆。
记得校准时别忘了中间的和两个边上的旋钮一起校准。
校准前记得全部放中位,3个旋钮也一样。
还有微调也要中位ls和rs是两个侧边电位器,s1和s2是两个旋钮第一屏,意思是按enter键开始校准,按一下enter。
第二屏,所有摇杆居中,旋钮和侧边电位器也调到物理居中,不管他的显示,然后按enter。
校准时不要太用力,刚好碰到边就可以了,不然拉到头会达不到100%,因为校准时太用力拉过了。
第三屏,依次把所有摇杆和旋钮都最大最小旋转几次,按enter 完成。
最后按exit退出就校准好了。
34.在遥控器设置第一页里,选择电压范围设置好后,继续向下,找到battery low 设置低压报警。
35.这个固件是官方最新的36.対频及距离检测:bind就是对频:按一下开始,再按一下停止。
X8r对频时离遥控器远一点,因为双向模式太近时信号会堵塞,对不上的,要20cm以上。
range是距离检测:就是让发射机功率降低到1/30,然后拉距测试,看能拉多少米不失控,然后再乘以30倍就是实际信号范围。
rssi是信号强度的意思。
在正常界面长按遥控器的page键,然后用+-号选择,有一个A1值就是rssi,百分比表示信号强度 0-99。
接收机内置回传rssi功能,还有一个rssi输出口,可以输出到第三方设备。
也许是其它的可以利用信号强度自动控制飞机的东西吧,要是信号低于某个值,可以让飞机自动往会飞。
rssi输出给fpv图传,在地面监控屏上显示信号值。
实时视频数据叠加功能用的着。
看rssi输出0-3.3v模拟信号,由外接AD转换成数字比例信号,0-3.3V的ad转换哦,各种外接都好用。
rssi输出0-3.3v模拟信号,由外接AD转换成数字比例信号,0-3.3V的ad转换哦,各种外接都好用。
37.把模型设置第一页里面最下面的master改成slave,然后设置ppm通道数就可以玩模拟了。
玩的时候把intarnalrf和externalrf 都关掉,这样内外高频头都不工作,既省电又延长高频头寿命。
短按menu 就出现模型选择页面,然后按一下page 到了单个模型的设置页面最下面。
默认是master,改为slave,这个就是模拟输出口。
Internalrf是内置高频头,externalrf是外置高频头。
trainer是教练口。
遥控器背对自己,左面那个音频口是模拟口,右边是耳机孔。
38.如果是喇叭滴的一声就是中点提醒,可以关掉,若把4个旋钮设置了中点位提醒,摇杆的关掉,这样,拧旋钮的时候听声音就知道到中间了这个里面设置。
RETA12LR 就是八个类比输入,reta是摇杆,12是旋钮,lr是侧边的旋钮。
39.这里设置黄框框是通道输出顺序,1234通道对应aetr。
红框框是设置摇杆顺序。
按照图形所指的摇杆设置对应的操作名。
这样按照你的操作类型选择默认的顺序就可以了,以后新建的模型顺序都按这个。
比如你是日本手,通道输出为aetr,那么改成美国手,通道输出依然为aetr,摇杆和通道输出自动又对应了,想想是不是很人性化40.遥控器输出的ppm值998-2102,中点为1500,对应百分比的-100到+100。
998-1500是-100-----0,1500-2102是0-----100。
41.内外高频头能同时用,还有可以把模拟口外接一个,同时3个高频头一起用。
42.混控设置:把这两个ele +改成- -改成+,就改ele的,其它的不改。
就改箭头那个,别改其它的。