第6章 轮系及其设计 《机械设计基础(第3版)》教案
第六章轮系(2011.5.5)
2 4 H 1 3
哈尔滨工业大学特种传动研究室
2、按基本构件分:
中心轮与系杆的轴线位置均固定且重合,通常以 它们作为运动的输入和输出构件,故称其为周转 轮系的基本构件。 输入和输出构件——承受外力矩
表示方法: K-中心轮 H-系杆
哈尔滨工业大学特种传动研究室
?K-H型
2
H
O O
1 3
哈尔滨工业大学特种传动研究室
在各轮齿数已知的情况下,只要给定nA(ωA) 、(nk)ωk、 (nH) ωH中任意两项,即可求得第三项,从而可求出原周转轮 系中任意两构件之间的传动比。
哈尔滨工业大学特种传动研究室
利用公式计算时应注意:
H (1) iAK 是转化机构中A轮主动、K轮从动时的传动 比,其大小和符号完全按定轴轮系处理。正负号仅表明在 该轮系的转化机构中,齿轮A和齿轮K的转向关系。
i18
z 2 z4 z6 z8 n1 n8 z1 z 3 z5 z7
哈尔滨工业大学特种传动研究室
例题
如图所示的轮系中,已知各轮齿数,齿轮1为主动轮, 求传动比。
解:首末两轮轴线平行,可用画箭头法表示首末两轮 转向关系,该轮系传动比为:
z2 z 3 z4 z5 z6 n1 i16 z z z z 1 2 3 z 4 5 n6
⑵ 齿数比前的“”、“”号不仅表明在转化机构 中齿轮轮A和齿轮K的转向关系,而且将直接影响到周转 轮系传动比的大小和正负号。 ⑶ A、 K 和H是周转轮系中各基本构件的真实角 速度,且为代数量。
哈尔滨工业大学特种传动研究室
差动轮系 A、 K 和H三者需要有两个为已知值,才能求解。
行星轮系 其中一个中心轮固定(例如中心轮K固定,即K0)
机械原理第6章轮系及其设计(精)
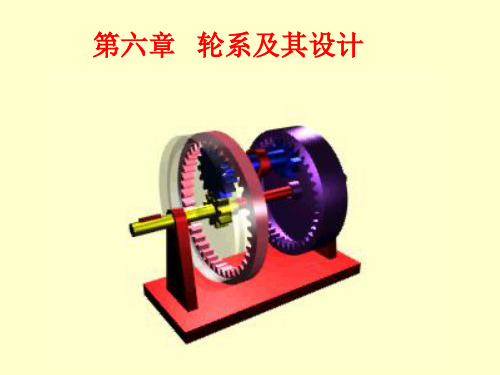
2. 差动轮系 在图6.2所示的周转轮系中,若中心轮1、3均不固定,则整个
轮系的自由度 F 3 4 2 4 2 2 。这种自由度为2的周转轮系称 为差动轮系。为了使该轮系具有确定的运动,需要两个原动件。
此外,周转轮系还可根据其基本构件的不同加以分类。设轮
系中的中心轮用K表示,系杆用H表示。由于图6.2所示轮系中有 两个中心轮,所以又可称其为2K-H型周转轮系。而图6.3所示 轮系又可称为3K型周转轮系,因其基本构件是1、3、4三个太阳
H,则其转化轮系的传动比 iAHB 可表示为
iAHB
AH BH
A H B H
f (z)
(6.3)
若一个周转轮系转化轮系的传动比为“+”,则称其为正号
机构;反之则称其为负号机构。
●6.3.3 转化轮系传动比计算公式的注意事项 使用转化轮系传动比计算公式的注意事项如下: (1) 式(6.3)只适用于转化轮系中齿轮A、齿轮B和系杆H轴线平
轮系的传动比计算,不仅需要知道传动比的大小,还需要确 定输入轴和输出轴之间的转向关系。下面分以下几种情况进行讨 论。 1. 平面定轴轮系
如图6.1所示,该轮系由圆柱齿轮组成,其各轮的轴线互相平 行,这种轮系称为平面定轴轮系。在该轮系中各轮的转向不是相
同就是相反,因此它的传动比有正负之分。所以规定:当两者转
即
i15
1 5
i12
i2'3
i3' 4
i45
z2 z3 z4 z5 z1z2' z3' z4
上式表明:定轴轮系的传动比等于组成该轮系的各对啮合齿
轮传动比的连乘积;其大小等于各对啮合齿轮中从动轮齿数的连
第六章轮系及其设计

定轴轮系传动比的计算的公式:
i1k
= 1 k
=
n1 =从1到k中各对齿轮传动比的连乘积 nk 所有末轮齿数的连乘积
= 所有首轮齿数的连乘积
2.首、末轮的转向 *平面定轴轮系:
3 4'
3'
24
5
1
i1k
= 1 k
= (−1)m
z2 zk z1 zk−1
m为外啮合的对数
*空间定轴轮系:
2
首末轮轴线平行 首末轮轴线不平行
3
2
o2
H
1 3
(2)特点:有一方面绕自身的几何轴线O2自转,另一方面 又随同转臂H绕几何轴线O1公转的 行星轮。
(3)类型:
F=2 (中心轮都是转动的) F=1 (有一个中心轮作了机架)
二、行星轮系传动比的计算
-H
2 2 3
H H
1
o1
1
3
2
o2
H
o1
1
3
2
o2
H
1 3
构件名称
转臂H 中心轮1 中心轮3
1+ z6
z4
3'
1
5
3
以上涉及到的都为两个中 心轮一个转臂的行星轮系, 称为2K-H型行星轮系。
求双重周转轮系的传动比i1H
解: 双周转轮系特点是,至少有一个行星轮同时绕三个轴线转动,主周转轮系 (5-H-6,和1-2-H-6)的行星架内有一个副周转轮系(2’-3-4-h-6) 行星轮系( 5-H-6)
(2)
2'
i45
= 4 5
=
z5 z4
(4)
34
4' 5
《机械设计基础》电子教案(2) 项目 6 轮系的分析与应用
上一页
返回
任务 6.2 轮系传动比的计算
• 1. 定轴轮系传动比的计算 • 轮系中两齿轮 (轴) 的转速或角速度之比, 称为轮系的传动比。 求
轮系的传动比不仅要计算它的数值, 而且还要确定两轮的转向关系。 • (1) 一对齿轮的传动比 • 最简单的定轴轮系是由一对齿轮组成的, 其传动比为
• 对于外啮合圆柱齿轮传动, 两轮转向相反, 上式取 “ - ” 号; 对 于内啮合圆柱齿轮传动, 两轮转向相同, 上式取 “ + ” 号。
• 两轮的相对转向关系也可用画箭头的方法来表示。 外啮合齿轮的箭 头方向相反, 内啮合齿轮的箭头方向相同, 圆柱齿轮传动的转向如 图 6 -3 (a) 和图 6 -3 (b) 所示。
下一页 返回
任务 6.2 轮系传动比的计算
• 对于圆锥齿轮传动、 蜗杆传动等空间齿轮传动机构, 因其轴线不平 行, 不能用正、 负号来说明其转向, 只能用画箭头的方法在图上标 注转向, 圆锥齿轮传动、 蜗杆传动的转向如图 6 -4 所示。
• 2. 周转轮系传动比的计算 • 如图 6 -5 (a) 所示为一典型的行星轮系, 齿轮 1 和 3 为中
心轮, 齿轮 2 为行星轮, 构件 H 为行星架。 由于行星轮 2 既绕 自身轴线 O 1 O 1 转动, 又随行星架 H 绕轴线 OO 转动, 不是绕 定轴的简单运动, 所以不能直接用求定轴轮系传动比的公式来求行 星轮系的传动比。
上一页 下一页 返回
任务 6.2 轮系传动比的计算
• 为了求出行星轮系的传动比, 可以采用 “转化机构法”, 即假设给 整个行星轮系加上一个与行星架的转速大小相等而方向相反的公共转 速 ( - n H ), 由相对运动原理可知, 轮系中各构件之间的相对 运动关系并不随之改变, 但此时行星架变为相对静止不动的状态, 齿轮 2的轴线 O 1 O 1 也随之相对固定, 行星轮系转化为假想的 “定轴轮系”, 即将图 6 - 5 (a) 转化为图 6 -5 (b)。 这个经转化后得到的假想定轴轮系, 称为该行星轮系的转化轮系。 利用求解定轴轮系传动比的方法, 借助转化轮系, 就可以将行星轮 系的传动比求出来。
机械设计第三版教学设计

机械设计第三版教学设计一、教学目标本教学设计旨在培养机械设计有关领域的基础理论知识,同时注重实践能力的培养,使学生能够在工程设计及实际应用中具有扎实的理论基础,能够运用所学知识解决实际问题。
二、教学内容2.1 理论课程2.1.1 机械设计基础1.机械设计的基本概念与原则2.机构的构成原理与分析方法3.机械零部件的基本参数及计算方法4.常用材料、工艺与制造技术2.1.2 机械设计进阶1.机械传动的基础知识2.机械零部件的设计方法3.机身结构设计理论4.泵、阀、轴承的设计原理及方法2.2 实验课程2.2.1 教学实验1:机械设计基础实验C加工实验2.材料力学性能测试与分析3.基本运动副的设计与分析4.套筒、轴等基本零件的设计及绘图2.2.2 教学实验2:机械设计进阶实验1.同步带传动机构的设计及绘图2.减速器的设计及绘图3.示波器、电机、风扇的机构设计与分析三、教学方法本教学设计采取“理论与实践相结合”的教学方法,结合学生实际情况,注重激发学生兴趣和积极性,采用以下教学方式:1.学生自主学习2.线上课程及线下授课相结合3.课堂讲述、案例分析和实验教学相结合4.课后作业及实验报告四、教学评价本教学设计的教学评价主要包括三个方面:1.理论知识考试成绩2.实验能力的考核,包括实验报告及课堂实验表现3.期末设计,包括设计提纲及设计报告,课堂展示及答辩五、教学资源1.机械设计第三版教材2.机械设计实验器材及材料3.设计软件及基础绘图软件4.同行及教学辅助资料六、总结通过本教学设计的实施,学生能够获得扎实的机械设计基础理论知识和实践操作能力,以及对机电工程领域的认识和掌握。
同时,教师能够对课程进行创新探索,提高教学质量和水平,为学生提供更好的教育和培养。
机械设计基础第六章.pptx
机构运 动简图
投影方向
如何表示一对圆锥齿轮的转向?
投影
机构 运动 简图
向方影投
线速度方 向
表示齿轮 回转方向
齿轮回转方 向
用线速度 方向表示 齿轮回转 方向
线速度方 向
如何表示蜗杆蜗轮传动的转向?
右旋蜗杆
蜗杆回转方向
蜗杆上一点 线速度方向
机构运 动简图
蜗轮回转方向
表示蜗杆、蜗轮 回转方向
蜗杆旋向影响蜗轮的回转方向
随机架转动
相当于系杆
把这种由定轴轮系和周转轮
H
系或者由两个以上的周转轮
系组成的,不能直接用反转
法转化为定轴轮系的轮系,
称为混合轮系
H
系杆回转方向
复合轮系传动比的计算
在计算混合轮系传动比时,既不能将整个轮系作为定轴轮 系来处理,也不能对整个机构采用转化机构的办法。
计算混合轮系传动比的正确方法是: (1) 首先将各个基本轮系正确地区分开来 (2) 分别列出计算各基本轮系传动比的方程式。
3 H
特别当 1 0 时
i3H
3 H
1
z1 z3
当 3 0时
i1H
1 H
1
z3 z1
z3 z1
F 34 24 2 2
轮3固定 :
差动轮系:F=2
F 33 23 2 1
行星轮系:F=1
三、混合轮系的传动比
系杆
什么是混合轮系?
为了把一个周转轮系 转化为定轴轮系,通 常采用反转法。
' 4
5
i12
i23
i34
i45
1 2 3 2 3 4
4 5
1 5
i 15
机械设计基础第6章

自动变速器具有自动变速、连续变矩、换档时不中断动力传递的特
点,并具有操作轻便、换档平稳、乘座舒适、过载保护性能好等优
点。目前越来越多的汽车,尤其是9座以下的乘用车,装备了自动变
速器。
• 2.行星齿轮机构的特性方程
行星齿轮机构的特性方程反映了单排行星齿轮机构的基本运动规律,
是行星齿轮机构变速的理论基础。下面进行讨论。
1)欲挂上一档,可操纵变速杆,通过拨叉使接合套20左移,与一
档同步器锁环19的接合齿圈和一档齿轮接合齿圈18接合后,动力便
可从第一轴依次经齿轮2、33,中间轴26,齿轮29、17,接合齿圈1
8,接合套20以及花键毂24,传给第二轴23输出。一档传动比为
z33 z17
i1 =
= 5.568
z2 z29
2)欲挂上二档,可通过拨叉使接合套12右移,使之与二档同步器锁
环14的接合齿圈和二档齿轮接合齿圈1 5接合后,变速器便从一档换
入了二档。此时,动力从第一轴依次经齿轮2、33,中间轴,齿轮
30、1 6,接合齿圈1 5,接合套12及花键毂1 3,最后传给第二轴。
其传动比为
z33 z16
i2 =
= 2.832
3
=1+α >1
2)主动件——齿圈,被动件~一行星架,固定件——太阳轮 。当太
阳轮被固定时,1 = 0,代入式(6-8) 得
α2 = α + 1 3
2 1 + α
所以传动比为 i =
=
>1
3
α
3)主动件——太阳轮,被动件——齿圈,固定件——行星架。当行
星架被固定时,3 = 0,代入式(6-8)得
的轴线都相互平行。
2024年《机械设计基础》教案

《机械设计基础》教案一、课程概述《机械设计基础》是机械工程及相关专业的一门重要专业基础课程,旨在培养学生掌握机械设计的基本原理、方法和技能,为后续专业课程的学习和实际工程应用奠定基础。
本课程内容丰富,涉及机械设计的基本理论、设计方法和设计实践,重点培养学生的创新能力和实践能力。
二、教学目标1.掌握机械设计的基本原理和方法,能运用所学知识解决实际问题。
2.培养学生的创新意识和团队合作精神,提高学生的设计能力。
3.了解机械设计领域的发展动态和前沿技术,拓宽学生的知识视野。
4.培养学生具备良好的工程素质和职业道德,为学生的职业生涯发展奠定基础。
三、教学内容1.机械设计概述:介绍机械设计的概念、任务、分类和发展趋势。
2.机械零件设计:包括传动零件、连接零件、轴系零件、弹簧等的设计原理和计算方法。
3.机械传动设计:介绍传动系统的类型、性能参数和设计方法,包括齿轮传动、带传动、链传动等。
4.轴承和联轴器设计:分析轴承的类型、性能和选用原则,介绍联轴器的结构和设计方法。
5.机械结构设计:阐述机械结构设计的基本原则、方法和步骤,包括结构要素、强度计算、稳定性分析等。
6.机械创新设计:探讨机械创新设计的方法和技巧,培养学生的创新思维和设计能力。
7.机械设计实例分析:分析典型机械设计实例,使学生了解机械设计的实际应用。
四、教学方法1.讲授法:系统讲解机械设计的基本原理和方法,使学生对课程内容有全面了解。
2.案例分析法:通过典型机械设计实例的分析,培养学生解决实际问题的能力。
3.讨论法:组织课堂讨论,激发学生的思维活力,培养学生的沟通能力和团队合作精神。
4.实践教学:安排课程设计、实验等实践环节,提高学生的动手能力和创新能力。
5.现代教育技术:利用多媒体、网络等现代教育技术手段,丰富教学形式,提高教学效果。
五、教学安排1.总学时:64学时2.理论教学:48学时3.实践教学:16学时(含课程设计、实验等)4.教学进度安排:第1周:机械设计概述第2-4周:机械零件设计(传动零件、连接零件、轴系零件、弹簧)第5-7周:机械传动设计(齿轮传动、带传动、链传动)第8-9周:轴承和联轴器设计第10-11周:机械结构设计第12周:机械创新设计第13周:机械设计实例分析第14周:课程设计第15周:实验第16周:复习与考试六、考核方式1.平时成绩:30%(包括课堂表现、作业、小测验等)2.实践环节:30%(课程设计、实验等)3.期末考试:40%七、教学资源1.教材:《机械设计基础》(主编:X,出版社:X)2.参考文献:《机械设计手册》、《机械设计课程设计指导书》等3.网络资源:中国大学MOOC、爱课程等在线课程资源4.实验室:机械设计实验室、机械创新实验室等八、教学效果评价1.课后作业:检查学生对课堂所学知识的掌握程度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第6章轮系及其设计
基本要求:了解轮系的分类;掌握定轴轮系、周转轮系传动比的计算;对轮系的主要功用有清楚的了解;对其它行星齿轮传动有所了解。
重点:定轴轮系的传动比计算;。
难点:周转轮系及其传动比计算。
学时:课堂教学:4学时。
教学方法:多媒体结合板书。
6.1 齿轮系及其分类
6.1.1 齿轮系的定义
由一系列齿轮组成的齿轮传动系统称为齿轮系。
6.1.2 齿轮系的分类
分类⎧⎪
⎨⎪定轴轮系(图6-1)周转轮系(图6-2)
O
O
O O
O 1O 1
O 1
O 1
O 1
O
6.2 定轴轮系的传动比
6.2.1 齿轮系传动比
定义——齿轮系的首、末两构件的角速度之比(包括首、末两构件的角速度比的大小和两构件。