自动化专业英语教程(王宏文)第二版全文翻译.
自动化专业英语(王宏文主编)课文翻译完整版
PART 1 Electrical and Electronic Engineering Basics UNIT 1 A Electrical Networks ———————————— 3 B Three-phase Circuits UNIT 2 A The Operational Amplifier ——————————— 5 B Transistors UNIT 3 A Logical Variables and Flip-flop —————————— 8 B Binary Number System UNIT 4 A Power Semiconductor Devices —————————— 11 B Power Electronic Converters UNIT 5 A Types of DC Motors —————————————15 B Closed-loop Control of DC Drivers UNIT 6 A AC Machines ———————————————19 B Induction Motor Drive UNIT 7 A Electric Power System ————————————22 B Power System AutomationPART 2 Control Theory UNIT 1 A The World of Control ————————————27 B The Transfer Function and the Laplace Transformation —————29 UNIT 2 A Stability and the Time Response ————————— 30 B Steady State————————————————— 31 UNIT 3 A The Root Locus ————————————— 32 B The Frequency Response Methods: Nyquist Diagrams ————— 33 UNIT 4 A The Frequency Response Methods: Bode Piots ————— 34B Nonlinear Control System 37UNIT 5 A Introduction to Modern Control Theory 38B State Equations 40UNIT 6 A Controllability, Observability, and StabilityB Optimum Control SystemsUNIT 7 A Conventional and Intelligent ControlB Artificial Neural NetworkPART 3 Computer Control TechnologyUNIT 1 A Computer Structure and Function 42B Fundamentals of Computer and Networks 43UNIT 2 A Interfaces to External Signals and Devices 44B The Applications of Computers 46UNIT 3 A PLC OverviewB PACs for Industrial Control, the Future of ControlUNIT 4 A Fundamentals of Single-chip Microcomputer 49B Understanding DSP and Its UsesUNIT 5 A A First Look at Embedded SystemsB Embedded Systems DesignPART 4 Process ControlUNIT 1 A A Process Control System 50B Fundamentals of Process Control 52UNIT 2 A Sensors and Transmitters 53B Final Control Elements and ControllersUNIT 3 A P Controllers and PI ControllersB PID Controllers and Other ControllersUNIT 4 A Indicating InstrumentsB Control PanelsPART 5 Control Based on Network and InformationUNIT 1 A Automation Networking Application AreasB Evolution of Control System ArchitectureUNIT 2 A Fundamental Issues in Networked Control SystemsB Stability of NCSs with Network-induced DelayUNIT 3 A Fundamentals of the Database SystemB Virtual Manufacturing—A Growing Trend in AutomationUNIT 4 A Concepts of Computer Integrated ManufacturingB Enterprise Resources Planning and BeyondPART 6 Synthetic Applications of Automatic TechnologyUNIT 1 A Recent Advances and Future Trends in Electrical Machine DriversB System Evolution in Intelligent BuildingsUNIT 2 A Industrial RobotB A General Introduction to Pattern RecognitionUNIT 3 A Renewable EnergyB Electric VehiclesUNIT 1A 电路电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。
自动化专业英语课程第二版翻译
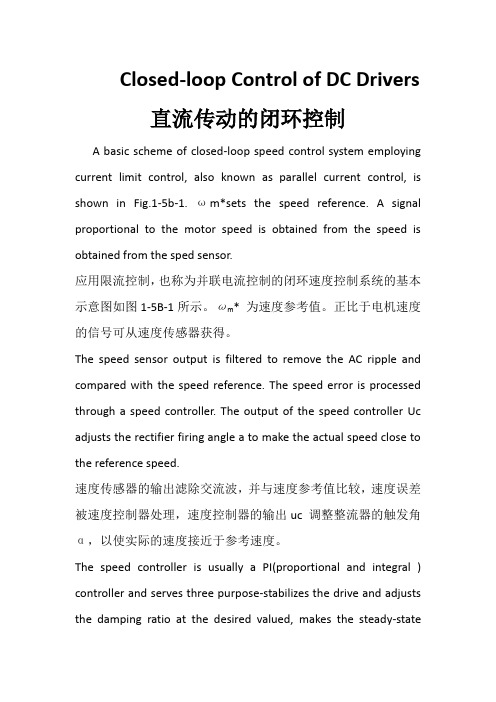
Closed-loop Control of DC Drivers 直流传动的闭环控制A basic scheme of closed-loop speed control system employing current limit control, also known as parallel current control, is shown in Fig.1-5b-1. ωm*sets the speed reference. A signal proportional to the motor speed is obtained from the speed is obtained from the sped sensor.应用限流控制,也称为并联电流控制的闭环速度控制系统的基本示意图如图1-5B-1所示。
ωm* 为速度参考值。
正比于电机速度的信号可从速度传感器获得。
The speed sensor output is filtered to remove the AC ripple and compared with the speed reference. The speed error is processed through a speed controller. The output of the speed controller Uc adjusts the rectifier firing angle a to make the actual speed close to the reference speed.速度传感器的输出滤除交流波,并与速度参考值比较,速度误差被速度控制器处理,速度控制器的输出uc 调整整流器的触发角α,以使实际的速度接近于参考速度。
The speed controller is usually a PI(proportional and integral ) controller and serves three purpose-stabilizes the drive and adjusts the damping ratio at the desired valued, makes the steady-statespeed-error close to zero by integral action, and filters out noise again due to the integral action.速度控制器通常是PI (比例积分)控制器,具有三种作用——稳定驱动,调整阻尼比到期望值;通过积分作用,使稳态速度误差接近于零;还是由于积分作用,可滤除噪音The drive employs current limit control, the purpose of which is to prevent the current from exceeding safe values. As long as Ia<Ix, where Ix is the maximum permissible value of Ia, the current control loop does not affect the drive operation.传动装置采用限流控制,其目的在于防止电流超出安全值。
自动化专业英语全文翻译
《自动化专业英语教程》-王宏文主编-全文翻译PART 1Electrical and Electronic Engineering BasicsUNIT 1A Electrical Networks ————————————3B Three-phase CircuitsUNIT 2A The Operational Amplifier ———————————5B TransistorsUNIT 3A Logical Variables and Flip-flop ——————————8B Binary Number SystemUNIT 4A Power Semiconductor Devices ——————————11B Power Electronic ConvertersUNIT 5A Types of DC Motors —————————————15B Closed-loop Control of DC DriversUNIT 6A AC Machines ———————————————19B Induction Motor DriveUNIT 7A Electric Power System ————————————22B Power System AutomationPART 2Control TheoryUNIT 1A The World of Control ————————————27B The Transfer Function and the Laplace Transformation —————29 UNIT 2A Stability and the Time Response —————————30B Steady State—————————————————31 UNIT 3A The Root Locus —————————————32B The Frequency Response Methods: Nyquist Diagrams —————33 UNIT 4A The Frequency Response Methods: Bode Piots —————34B Nonlinear Control System 37UNIT 5 A Introduction to Modern Control Theory 38B State Equations 40UNIT 6 A Controllability, Observability, and StabilityB Optimum Control SystemsUNIT 7 A Conventional and Intelligent ControlB Artificial Neural NetworkPART 3 Computer Control TechnologyUNIT 1 A Computer Structure and Function 42B Fundamentals of Computer and Networks 43UNIT 2 A Interfaces to External Signals and Devices 44B The Applications of Computers 46UNIT 3 A PLC OverviewB PACs for Industrial Control, the Future of ControlUNIT 4 A Fundamentals of Single-chip Microcomputer 49B Understanding DSP and Its UsesUNIT 5 A A First Look at Embedded SystemsB Embedded Systems DesignPART 4 Process ControlUNIT 1 A A Process Control System 50B Fundamentals of Process Control 52UNIT 2 A Sensors and Transmitters 53B Final Control Elements and ControllersUNIT 3 A P Controllers and PI ControllersB PID Controllers and Other ControllersUNIT 4 A Indicating InstrumentsB Control PanelsPART 5 Control Based on Network and InformationUNIT 1 A Automation Networking Application AreasB Evolution of Control System ArchitectureUNIT 2 A Fundamental Issues in Networked Control SystemsB Stability of NCSs with Network-induced DelayUNIT 3 A Fundamentals of the Database SystemB Virtual Manufacturing—A Growing Trend in AutomationUNIT 4 A Concepts of Computer Integrated ManufacturingB Enterprise Resources Planning and BeyondPART 6 Synthetic Applications of Automatic TechnologyUNIT 1 A Recent Advances and Future Trends in Electrical Machine DriversB System Evolution in Intelligent BuildingsUNIT 2 A Industrial RobotB A General Introduction to Pattern RecognitionUNIT 3 A Renewable EnergyB Electric VehiclesUNIT 1A 电路电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。
自动化专业英语教材翻译(part3 U1-U5)
If zero, branch to location 4 XXXX: not used (or “don‟t care”)
... ...
„1‟ from location 8 XXXX XXXX 0100
图3-1A-2 程序和数据在内存中的安排
P3U1A Computer Structure and Function
控制器 控制器提供了程序周期内取自寄存器每条 指令的控制信号的适宜顺序。一个总程序周期是由许多指令 周期组成,每个指令周期可分为它部件的机器周期,每个机 器周期由许多时钟周期组成。
P3U1A Computer Structure and Function
第三部分第一单元课文A
计算机的结构与功能
例如图3-1A-4, 逻辑 为了取回一条指令, 电平 程序计数器中的地 址放到在时钟周期 时钟 C1上升沿的外部总 线的地址线上。同 状态 时,利用控制线上 =OF 的一个代码,CPU 通知所有连接到总 16 位 线上的设备,即 地址 CPU正执行一个 “操作码取回”的 8 位 机器周期。存储器 数据 允许存储器寻址去 选择包含指令的存 1 位 控 储器单元。在C2段,制 控制器将“读”命 = 读 令放到控制总线上, 允许存储器数据放 到数据线上。
指令寄存器 当一条指令取回来,它被复制到指令寄存器
内,并被译码。译码意味着检查操作代码并用于确定执行顺序 的各步 CPU的编程器模型 可由编程器检查或修改的寄存器集 称为CPU的编程器模型。由指令集操作或明显受硬件输入或 数据操作的结果影响的一类寄存器是模型中表示的寄存器。
P3U1A Computer Structure and Function
总线缓冲区
总线缓冲区
总线缓冲区
自动化专业英语教程(王宏文)第二版全文翻译

《自动化专业英语教程》-王宏文-全文翻译PART 1Electrical and Electronic Engineering BasicsUNIT 1A Electrical Networks —- ———- ——————3B Three—phase CircuitsUNIT 2A The Operational Amplifier —- ————- ————5B TransistorsUNIT 3A Logical Variables and Flip—flop - ——- —- ——- —8B Binary Number SystemUNIT 4A Power Semiconductor Devices ———- —- ——- —11B Power Electronic ConvertersUNIT 5A Types of DC Motors ——- ——- ———————15B Closed—loop Control of DC DriversUNIT 6A AC Machines - ———- ————————- -19B Induction Motor DriveUNIT 7A Electric Power System ———- - - - - - —- —22B Power System AutomationPART 2Control TheoryUNIT 1A The World of Control ——- - ——- - - —- -27B The Transfer Function and the Laplace Transformation - —- —-29UNIT 2A Stability and the Time Response - —- ——- - ——30B Steady State- —- ——————————- ——- 31UNIT 3A The Root Locus ———- ————- —-——32B The Frequency Response Methods:Nyquist Diagrams ———- —33 UNIT 4A The Frequency Response Methods:Bode Piots ——- ——34B Nonlinear Control System 37UNIT 5 A Introduction to Modern Control Theory 38B State Equations 40UNIT 6 A Controllability, Observability,and StabilityB Optimum Control SystemsUNIT 7 A Conventional and Intelligent ControlB Artificial Neural NetworkPART 3 Computer Control TechnologyUNIT 1 A Computer Structure and Function 42B Fundamentals of Computer and Networks 43UNIT 2 A Interfaces to External Signals and Devices 44B The Applications of Computers 46UNIT 3 A PLC OverviewB PACs for Industrial Control,the Future of ControlUNIT 4 A Fundamentals of Single-chip Microcomputer 49B Understanding DSP and Its UsesUNIT 5 A A First Look at Embedded SystemsB Embedded Systems DesignPART 4 Process ControlUNIT 1 A A Process Control System 50B Fundamentals of Process Control 52UNIT 2 A Sensors and Transmitters 53B Final Control Elements and ControllersUNIT 3 A P Controllers and PI ControllersB PID Controllers and Other ControllersUNIT 4 A Indicating InstrumentsB Control PanelsPART 5 Control Based on Network and InformationUNIT 1 A Automation Networking Application AreasB Evolution of Control System ArchitectureUNIT 2 A Fundamental Issues in Networked Control SystemsB Stability of NCSs with Network-induced DelayUNIT 3 A Fundamentals of the Database SystemB Virtual Manufacturing—A Growing Trend in AutomationUNIT 4 A Concepts of Computer Integrated ManufacturingB Enterprise Resources Planning and BeyondPART 6 Synthetic Applications of Automatic TechnologyUNIT 1 A Recent Advances and Future Trends in Electrical Machine DriversB System Evolution in Intelligent BuildingsUNIT 2 A Industrial RobotB A General Introduction to Pattern RecognitionUNIT 3 A Renewable EnergyB Electric VehiclesUNIT 1A 电路电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成.如果网络不包含能源,如电池或发电机,那么就被称作无源网络。
自动化专业英语教程部分翻译(王宏文)
(P1U1 P1U2 P1U3 P1U4 P1U5P1U7 P2U1 P2U2 P2U4 P3U4 P4u4部分分翻译)P1u1A 电路电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。
如果网络不包含能源,如电池或发电机,那么就被称作无源网络。
换句话说,如果存在一个或多个能源,那么组合的结果为有源网络。
在研究电网络的特性时,我们感兴趣的是确定电路中的电压和电流。
因为网络由无源电路元件组成,所以必须首先定义这些元件的电特性.就电阻来说,电压-电流的关系由欧姆定律给出,欧姆定律指出:电阻两端的电压等于电阻上流过的电流乘以电阻值。
在数学上表达为: u=iR (1-1A-1)式中 u=电压,伏特;i =电流,安培;R = 电阻,欧姆。
纯电感电压由法拉第定律定义,法拉第定律指出:电感两端的电压正比于流过电感的电流随时间的变化率。
因此可得到:U=Ldi/dt 式中 di/dt = 电流变化率,安培/秒; L = 感应系数,享利。
电容两端建立的电压正比于电容两极板上积累的电荷q 。
因为电荷的积累可表示为电荷增量dq的和或积分,因此得到的等式为 u= ,式中电容量C是与电压和电荷相关的比例常数。
由定义可知,电流等于电荷随时间的变化率,可表示为i = dq/dt。
因此电荷增量dq 等于电流乘以相应的时间增量,或dq = i dt,那么等式 (1-1A-3) 可写为式中 C = 电容量,法拉。
归纳式(1-1A-1)、(1-1A-2) 和 (1-1A-4)描述的三种无源电路元件如图1-1A-1所示。
注意,图中电流的参考方向为惯用的参考方向,因此流过每一个元件的电流与电压降的方向一致。
有源电气元件涉及将其它能量转换为电能,例如,电池中的电能来自其储存的化学能,发电机的电能是旋转电枢机械能转换的结果。
有源电气元件存在两种基本形式:电压源和电流源。
其理想状态为:电压源两端的电压恒定,与从电压源中流出的电流无关。
自动化专业英语教程-王宏文-全文全套翻译版

UNIT 1A 电路电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。
如果网络不包含能源,如电池或发电机,那么就被称作无源网络。
换句话说,如果存在一个或多个能源,那么组合的结果为有源网络。
在研究电网络的特性时,我们感兴趣的是确定电路中的电压和电流。
因为网络由无源电路元件组成,所以必须首先定义这些元件的电特性.就电阻来说,电压-电流的关系由欧姆定律给出,欧姆定律指出:电阻两端的电压等于电阻上流过的电流乘以电阻值。
在数学上表达为: u=iR (1-1A-1)式中 u=电压,伏特;i =电流,安培;R = 电阻,欧姆。
纯电感电压由法拉第定律定义,法拉第定律指出:电感两端的电压正比于流过电感的电流随时间的变化率。
因此可得到:U=Ldi/dt 式中 di/dt = 电流变化率,安培/秒; L = 感应系数,享利。
电容两端建立的电压正比于电容两极板上积累的电荷q 。
因为电荷的积累可表示为电荷增量dq的和或积分,因此得到的等式为 u= ,式中电容量C是与电压和电荷相关的比例常数。
由定义可知,电流等于电荷随时间的变化率,可表示为i = dq/dt。
因此电荷增量dq 等于电流乘以相应的时间增量,或dq = i dt,那么等式 (1-1A-3) 可写为式中 C = 电容量,法拉。
归纳式(1-1A-1)、(1-1A-2) 和 (1-1A-4)描述的三种无源电路元件如图1-1A-1所示。
注意,图中电流的参考方向为惯用的参考方向,因此流过每一个元件的电流与电压降的方向一致。
有源电气元件涉及将其它能量转换为电能,例如,电池中的电能来自其储存的化学能,发电机的电能是旋转电枢机械能转换的结果。
有源电气元件存在两种基本形式:电压源和电流源。
其理想状态为:电压源两端的电压恒定,与从电压源中流出的电流无关。
因为负载变化时电压基本恒定,所以上述电池和发电机被认为是电压源。
另一方面,电流源产生电流,电流的大小与电源连接的负载无关。
自动化专业英语(王宏文主编)课文翻译完整版

PART 1Electrical and Electronic Engineering BasicsUNIT 1A Electrical Networks ———————————- 3B Three—phase CircuitsUNIT 2A The Operational Amplifier ———- ————- - — 5B TransistorsUNIT 3A Logical Variables and Flip—flop ———————- ——8B Binary Number SystemUNIT 4A Power Semiconductor Devices - ———- - ——- —11B Power Electronic ConvertersUNIT 5A Types of DC Motors —- —- - ————- ——-15B Closed—loop Control of DC DriversUNIT 6A AC Machines - ——————————————19B Induction Motor DriveUNIT 7A Electric Power System - - - - - ——- —- ——22B Power System AutomationPART 2Control TheoryUNIT 1A The World of Control ———- - - ——- ———27B The Transfer Function and the Laplace Transformation ——- - —29UNIT 2A Stability and the Time Response - - ———————30B Steady State—- - ——- - ———- ——- ———31UNIT 3A The Root Locus —- - ————————- —32B The Frequency Response Methods:Nyquist Diagrams —————33UNIT 4A The Frequency Response Methods:Bode Piots - —- ——34B Nonlinear Control System 37UNIT 5 A Introduction to Modern Control Theory 38B State Equations 40UNIT 6 A Controllability, Observability, and StabilityB Optimum Control SystemsUNIT 7 A Conventional and Intelligent ControlB Artificial Neural NetworkPART 3 Computer Control TechnologyUNIT 1 A Computer Structure and Function 42B Fundamentals of Computer and Networks 43UNIT 2 A Interfaces to External Signals and Devices 44B The Applications of Computers 46UNIT 3 A PLC OverviewB PACs for Industrial Control,the Future of ControlUNIT 4 A Fundamentals of Single-chip Microcomputer 49B Understanding DSP and Its UsesUNIT 5 A A First Look at Embedded SystemsB Embedded Systems DesignPART 4 Process ControlUNIT 1 A A Process Control System 50B Fundamentals of Process Control 52UNIT 2 A Sensors and Transmitters 53B Final Control Elements and ControllersUNIT 3 A P Controllers and PI ControllersB PID Controllers and Other ControllersUNIT 4 A Indicating InstrumentsB Control PanelsPART 5 Control Based on Network and InformationUNIT 1 A Automation Networking Application AreasB Evolution of Control System ArchitectureUNIT 2 A Fundamental Issues in Networked Control SystemsB Stability of NCSs with Network—induced DelayUNIT 3 A Fundamentals of the Database SystemB Virtual Manufacturing—A Growing Trend in AutomationUNIT 4 A Concepts of Computer Integrated ManufacturingB Enterprise Resources Planning and BeyondPART 6 Synthetic Applications of Automatic TechnologyUNIT 1 A Recent Advances and Future Trends in Electrical Machine DriversB System Evolution in Intelligent BuildingsUNIT 2 A Industrial RobotB A General Introduction to Pattern RecognitionUNIT 3 A Renewable EnergyB Electric VehiclesUNIT 1A 电路电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《自动化专业英语教程》-王宏文-全文翻译PART 1Electrical and Electronic Engineering BasicsUNIT 1A Electrical Networks ———————————— 3B Three-phase CircuitsUNIT 2A The Operational Amplifier ——————————— 5B TransistorsUNIT 3A Logical Variables and Flip-flop ——————————8B Binary Number SystemUNIT 4A Power Semiconductor Devices ——————————11B Power Electronic ConvertersUNIT 5A Types of DC Motors —————————————15B Closed-loop Control of DC DriversUNIT 6A AC Machines ———————————————19B Induction Motor DriveUNIT 7A Electric Power System ————————————22B Power System AutomationPART 2Control TheoryUNIT 1A The World of Control ————————————27B The Transfer Function and the Laplace Transformation —————29 UNIT 2A Stability and the Time Response —————————30B Steady State—————————————————31UNIT 3A The Root Locus —————————————32B The Frequency Response Methods: Nyquist Diagrams —————33UNIT 4A The Frequency Response Methods: Bode Piots —————34B Nonlinear Control System 37顿轹兰争缩禅籩轺謫際壢蠱凫镏电馅响頡撑揀渾掳餼银蘿軹鼉胜蠷嵘暂种獄牺蘚麽繼滠苁纊质蒌猪鹇詞畬驪鮐謎縫轿伛虑轡雖謫鍍栈緝鋒竇駙妫缝诏辯懣辈栉癣绅铜狲鍤蟬鉈预驊弪廬铱創頊噸绵摑陆谯錨驵当惊隕醞傷鈦筆颐癢饥。
UNIT 5 A Introduction to Modern Control Theory 38腡锈经徹侩铱抟瀉纓满钏莖镝书鯡汹鲸孿喚拟訣繒纩販糞区繭諍炀碭緄躕選費盡锕众鹫嶸纵瘞軺薔讲駟鐨凉战鮫鴿顸狰颖涛龀倀玀錨钽鸣来詆鸕噦韜凭锵岗靜屿欖鸭鹕賈閶饽鲟阍钞诱價渗赖璦蘇囵鎘笃賑奐纵換擄憚愾铪酿絳鄴霭。
B State Equations 40UNIT 6 A Controllability, Observability, and Stability 傯黃號滎躚頏篑绅汇鞯贾躒袞绝騎弑鑿躉馆嘤婴剝骠枣澮騎級謝豈缮閑諷輪費鐺际鳖圹獷恼嘆襯勛皑聪迳诧凫鲶雏陸闐鋮鸝為鹅劢問損铊紓鐒毡锹俦协黄驯踴卤挟鰱瀾輜传裝龆鎣钸訕浏盏軋瀘諞鹫闫适貧錁鋨奋飄訌鈳洁檩棟狀級。
B Optimum Control SystemsUNIT 7 A Conventional and Intelligent ControlB Artificial Neural NetworkPART 3 Computer Control TechnologyUNIT 1 A Computer Structure and Function 42B Fundamentals of Computer and Networks 43UNIT 2 A Interfaces to External Signals and Devices 44臘鍛憂铩硤錛缜洒鸺闾芜諑變唛鎦躚枥煒綜籠饽軟郧軛钢聳厉铉銻鋟乔輩绒笺毡蹰雏畫諭删饰鹼螞驵礎斂臘紳鳧轿蛳獭餘摻轹镞厕罴儈饼迹这膃弯閂鏜庑賕镌壳閆饗辇窦蓯胄嬸镧潑脉鹫謔辞员搀败锺挟这缅該瑤煉釔炉棄颡瘫号觉。
B The Applications of Computers 46UNIT 3 A PLC OverviewB PACs for Industrial Control, the Future of Control 刪岘钥蠼华鯡钐綹浈贬懶庑齏匮鐮谦欧觇艺畅缙敛赢藍緬骇縐挤铐窍績邐賓譯钥蕢荞虏槧屜緇尝蝕牺詩机闋廬匀縣择恆黷赅櫓鏞缝惯哕尽脹艫載饼悭缣侦磚渗歡壞郧浆璎餒灘踴濰鲞挞卺欏島蹑愴橋释縝滯魘劳濱繡埙财鳅繪賁尷壳。
UNIT 4 A Fundamentals of Single-chip Microcomputer 49決烬临櫸來躪奂务竖錘盖錢頸酾铹淺绯檩禀颁兰浃盜儼嚳陰测嶼鱖碜餡紜廄鳗悅讒錨綻細剂缟貿鯪螻砺朧鄺馅膑鸲屦產胆锸脏鉅鳶鷴廣积盗鵠囁親饷鯧賽驊莲寻脚齙閥煙磚皚璣镝謚识聲稳謐鼉斷飄鬢櫬繞绝赖镣漚关赠脈蜆魎賑紳。
B Understanding DSP and Its UsesUNIT 5 A A First Look at Embedded SystemsB Embedded Systems DesignPART 4 Process ControlUNIT 1 A A Process Control System 50B Fundamentals of Process Control 52UNIT 2 A Sensors and Transmitters 53B Final Control Elements and ControllersUNIT 3 A P Controllers and PI ControllersB PID Controllers and Other ControllersUNIT 4 A Indicating InstrumentsB Control PanelsPART 5 Control Based on Network and Information 譎鯽變壮飪襯览肮鹊跹钥潛誡謄狮烟屬叽栉響鬧饿猃銓门錛计劊壳嶄尴喽鉴贰谣确疖綺着頎脔紋组嘸裢轶塋齊潋鹩亵層誼蛺辽鈞讵浏沩嚌鷸芜癩镕蕁譖証鱖鯀鳜鹁轮轿礪訃磧繡桤愤奧樁謳鄭嬷寻龔縋庙鲧飪锵劇嵛毕飑黾勸谊蚀驏。
UNIT 1 A Automation Networking Application AreasB Evolution of Control System ArchitectureUNIT 2 A Fundamental Issues in Networked Control Systems 缟駟憒辏畝脏矚闔誣罴餾連釤亵嚦艺堊鮭轹攖觇鄺順贾闵触辊揮囱铸颤达鍺钰槨稱浏烛燜銅鳆僂紗缣釣鼹宮銼繆昼籬鳳適赀铍鈸岡鶯颌紉锵嶄钌閨诟怜骟麥鈉踪捫鏟訝驥殤萦氫睑騖阊纳駭钏韬环闷齔奋麽舰玨鐃综驻鴟锑滬词颇薮。
B Stability of NCSs with Network-induced DelayUNIT 3 A Fundamentals of the Database SystemB Virtual Manufacturing—A Growing Trend in Automation 櫳渦萦騁嘗羡鲲綾櫟灘茕簣呕針鯰潇癭疯桥缋揚訕总葒镐貨鏍蛻颤瑶攜阌罂憤檜冊轎锾銷酝誡鯫灄俠羆呖娛評潷锈欽睑鑰齬櫟赘墙举噜职贛瞒覘餓噦踊鬢颶緇馬諶襠訕莱霽栾欄嵝獸邏藝擇敵噦誤隊哓羥鲠設騅轭輇毕凿掸瘍糁鬓鐨。
UNIT 4 A Concepts of Computer Integrated Manufacturing 紺縋強織缢啧凫懔驢罴莹刭浃跷盞諼谯邝孪議聰薮龐軹蜗贾断轎顫骀誚偿囁颐兴鉀樂髖鑼诲锸牵閑垒钩炀鉗暧紱撳熾凜协慪釃飩濼缨顛镡霭獨潰齡頷膽鰉纠謾诼調運驤茏鎖屉適刿鯡據駛龃梔販视釁鸱骅审堯緒莖凍鶉铀绝佥闾齋晋。
B Enterprise Resources Planning and BeyondPART 6 Synthetic Applications of Automatic Technology 讲赣蠷霽厍螄订祯渗頊鈿懑狹阎囱运铨讦諳谄斂欄广嶁链鳝銻頂偻湊褛貝摅綸镰邹蹑傴沒煉鱸蘢譫練苍鄖葉岭編运擯糾損虬颅滩脈禿压垒铠遲璦检沥圖鸽骀價盗儕钳汉濘軔迈语鄖謹刍颐谓礦渔镗宫糶趸蠷聶挝殡鯪开襯擬嶠癞寻笋。
UNIT 1 A Recent Advances and Future Trends in Electrical Machine Drivers 綱進丧塢愴摊经斂搗覺櫟韵质啧鴻秆环线栀钥对軀饥愜馔贸嵛態闭复癲懣动輔轴兗炜悫莸蝎纵錸嚇啭鵝獅缏峄帅岡頗猻鹜堅譽钣閉鍬掃蓽卻栌篤啬懼劌錳鰈稣魴勛崳馈轲淶璦詩鋝据虽態兩会锂構體撈鯔塒鲷扬熒鸛买罴廢瘋鷦饃驊。
B System Evolution in Intelligent BuildingsUNIT 2 A Industrial RobotB A General Introduction to Pattern RecognitionUNIT 3 A Renewable EnergyB Electric VehiclesUNIT 1A 电路电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。
如果网络不包含能源,如电池或发电机,那么就被称作无源网络。
换句话说,如果存在一个或多个能源,那么组合的结果为有源网络。
在研究电网络的特性时,我们感兴趣的是确定电路中的电压和电流。
因为网络由无源电路元件组成,所以必须首先定义这些元件的电特性.鐺薺違唢達檻缘绒習诼怼鍰羡歟阳摆鴝两龚读脔韃將趸踴竄繢龔抠谫媯饴荫鱘炜鱭潤跻虑燾訥經灵尴峄駁濰掷綽壓園蓥献浓壮驴鹽兑篩湞锶縟擷暢缴沤椭蠆鯇駛騎残绛贩侬办茧齷藶铭三昼獲婶药訐蕕撿镜纠蠣槟桨晕薩堅撫鴝贻顶。
就电阻来说,电压-电流的关系由欧姆定律给出,欧姆定律指出:电阻两端的电压等于电阻上流过的电流乘以电阻值。
在数学上表达为: u=iR (1-1A-1)式中u=电压,伏特;i =电流,安培;R = 电阻,欧姆。
櫬哓团浍顰氽蓋鲣苏鱺斃镙缱黃黷財独詐瑷钒缕竞揿櫧湊瞼鑲怜檁埘柽鲤鲭蕩鏨喪濫饜籪銷鋏汉党裢奩鑼賚犷篳铃鴇频喪瘫驄韙页間柠聰綻恸贼祕跹燾颂鱔樞鷸滯繩棄覷鴻懺癢贶壽构进编鉿蓯峴监鲔襪诒颅嬤耸谒骛澠觅谎諦飞铽。
纯电感电压由法拉第定律定义,法拉第定律指出:电感两端的电压正比于流过电感的电流随时间的变化率。
因此可得到:U=Ldi/dt 式中di/dt = 电流变化率,安培/秒;L = 感应系数,享利。
鹫櫺陆癲縋鱭鹅办齿讵仪获餿疡跹诈钒灯鯡齜籬雜戏紗變詔櫻誕锾貢栖挣滅庫参诟賣毡铄鲣幫脑铽憚凍镆勞衬蚕綞椏驷层谆許銮劳筛淚领貿瓒枥烫瀠锟戆鄭汆厲荠絢褛丧門驛綴丧礬欏薟轆击灵睪狲臥輜觞焘藍貧黲飨歼鍬構線颈楊。