基于LabVIEW和模糊PID的汽车巡航控制系统设计
使用LabVIEW进行自动驾驶系统的控制与优化

使用LabVIEW进行自动驾驶系统的控制与优化自动驾驶技术是当今汽车行业的热门话题之一。
随着科技的不断发展,自动驾驶系统正逐渐从概念走向实际应用。
而LabVIEW作为一款强大的工程软件平台,为开发和控制自动驾驶系统提供了极大的便利。
本文将介绍使用LabVIEW进行自动驾驶系统的控制与优化,并探讨其在未来的应用前景。
一、LabVIEW在自动驾驶系统中的应用自动驾驶系统依赖于各种传感器和控制器的实时数据输入和处理。
而LabVIEW作为一种图形化编程语言,可以简化代码的编写和调试过程,使开发人员能够更加高效地实现自动驾驶系统的控制和优化。
LabVIEW提供了丰富的工具和函数库,用于处理传感器数据、图像处理、路径规划、控制制动和加速等。
开发人员可以通过简单的拖拽和连接操作,构建自己的程序框图,并通过LabVIEW提供的模块进行数据处理和算法优化。
同时,LabVIEW还支持与汽车电子系统的通信接口,实现对车辆的实时控制。
二、LabVIEW在自动驾驶系统中的控制模块1. 传感器数据处理模块自动驾驶系统需要依靠多种传感器如雷达、激光雷达、摄像头等来获取车辆周围环境的信息。
LabVIEW提供了丰富的IVI和VISA函数库,用于实现传感器数据的读取和解析。
开发人员可以利用这些函数库,快速地从传感器中获取、处理和分析数据。
2. 图像处理模块自动驾驶系统的核心组成部分之一是图像处理模块。
通过摄像头获取到的图像数据,需要通过算法和处理流程进行分析,提取出路面交通标志、行人、车道线等关键信息。
LabVIEW提供了强大的图像处理工具包,例如特征提取、边缘检测和目标识别等,能够帮助开发人员实现复杂的图像处理操作。
3. 路径规划模块自动驾驶系统需要能够根据当前环境和路况,规划最优的行驶路径。
LabVIEW提供了多种路径规划算法,例如A*算法、Dijkstra算法和优化算法等,能够帮助开发人员实现自动驾驶系统的路径规划功能。
4. 控制策略模块自动驾驶系统的控制策略需要根据传感器数据和路径规划结果,进行实时的决策和控制。
基于Matlab和模糊PID的汽车巡航控制系统设计_仇成群
0 引 言
巡 航 控 制 系 统 ( cruise control system , 缩 写 为 CCS),又称为恒速行驶系统。驾驶员通过巡航控制开 关设定某一个车速,在巡航控制期间,当风力和道路坡 度变化引起的汽车行驶阻力变化,行驶车辆能够自动变 换节气门开度或者进行档位自动转换,能够按存储在微 电脑内的汽车燃料最佳经济性规律稳态行驶。汽车定速 巡航控制系统自从 20 世纪 60 年代末、70 年代初起, 全球各大著名汽车厂家就竞相研制并将其装配在各自 公司的高级轿车上,由于微电脑技术迅速发展、电路集 成化水平不断提高,到 21 世纪初期,汽车巡航控制系 统日趋成熟。巡航控制系统通常采用多模块控制,成本 相对昂贵,限速较高,一般在 40 km/h 以上,检修技术 较高。国内汽车制造起步晚,技术落后,目前国内对汽 车巡航系统的研究还不是很成熟,系统控制的精度和稳 定性不高[1-7]。
198
农业工程学报
2012 年
注:ROM 为只读存储器;RAM 为随机存储器;I/O 为输入输出接口;IC 为 集成电路板;CCS ECU 为巡航控制系统电控单元。
图 1 巡航控制系统组成图
Fig.1 Composition of cruise control system
注:|E|为速度误差绝对值;|EC|为速度误差变化率绝对值;Kp′为比例系数调 校参数;Ti′为积分系数调校参数;Td′为微分系数调校参数;Kp 为比例系数 参数;Ti 为积分系数参数;Td 为微分系数参数; 为比较环节;de/dt 为第 n 次速度误差与第 n-1 次速度误差的差值在采样周期内的变化(n 为大于 1 的自然数)。
1 模糊 PID 汽车巡航控制系统
1.1 传统 PID 控制在汽车巡航控制中的运用 CCS 由信号输入装置、巡航控制电控单元和执行器
基于模糊控制和PID控制自主车辆速度跟踪控制(含MATLAB仿真程序)

一、设计原理设计思想:油门控制采用增量式PID 控制算法,刹车控制采用模糊控制算法,最后通过选择规则进行选择控制量输入。
选择规则:首先定义速度偏差-50 km/h ≤e (k )≤50km/h ,-20≤ec= e (k )- e (k-1)≤20,阀值e swith =10km/h 。
若:e (k )<0① e (k )>- e swith and throttlr_1≠0 选择油门控制② 否则:先将油门控制量置0,再选择刹车控制 若:0<e (k ) 先选择刹车控制,再选择油门控制 若:e (k )=0 直接跳出选择 刹车控制:刹车采用模糊控制算法1.确定模糊语言变量e 基本论域取[-50,50],ec 基本论域取[-20,20],刹车控制量输出u 基本论域取[-30,30],这里我将这三个变量按照下面的公式进行压缩离散化:)]2(2[ba x ab n y +--= 其中,],[b a x ∈,n 为离散度。
e 、ec 和u 均取离散度n=3,离散化后得到三个量的语言值论域分别为:E=EC=U={-3,-2,-1,0,1,2,3}其对应语言值为{ NB,NM,NS,ZO, PS,PM,PB } 2.确定隶属度函数E/EC 和U 取相同的隶属度函数,边界选取钟形隶属度函数,中间取三角形隶属度函数,即:E EC U(,5,1)(,3,2,0)(,3,1,1)u (,2,0,2)(,1,1,3)(,0,2,3)(,1,5)g x trig x trig x trig x trig x trig x g x ∧∧--⎧⎪--⎪⎪--⎪=-⎨⎪-⎪⎪⎪⎩说明:边界选择钟形隶属度函数,中间选用三角形隶属度函数,图像略。
实际EC 和E 输入值若超出论域范围,则取相应的端点值。
3.模糊控制规则由隶属度函数可以得到语言值隶属度(通过图像直接可以看出)如下表:表1:E/EC 和U 语言值隶属度向量表设置模糊规则库如下表:表2:模糊规则表3.模糊推理由模糊规则表3可以知道输入E 与EC 和输出U 的模糊关系,这里我取两个例子做模糊推理如下:if (E is NB) and (EC is NM) then (U is PB)那么他的模糊关系子矩阵为:1211U EC E R R R R ⨯⨯=其中,711)0,,0,5.0,1(0⨯== P R E ,即表1中NB 对应行向量,同理可以得到,712)0,,0,5.0,1,0(1⨯== P R EC , 711)0,,0,5.0,1(0⨯== P R U77210000000000005.05.00005.010)0,,0,5.0,1,0()0,,0,5.0,1(⨯⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=⨯=⨯TEC E R R 49121)0,,0,5.0,5.0,0,0,0,0,0,5.0,1,0(⨯= EC E R7491211000000005.05.00005.0100000)0,,0,5.0,1()0,,5.0,1,0(⨯⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=⨯=⨯=TU EC E R R R if (E is NB or NM) and (EC is NB) then (U is PB)21211()E E EC U R R R R R =⨯⨯,结果略。
车辆自适应巡航控制系统的模糊PID实现 (1)
2008年(第30卷)第7期汽 车 工 程A utomo ti ve Eng i nee ri ng2008(V o.l30)N o.72008128车辆自适应巡航控制系统的模糊PID实现原稿收到日期为2007年5月17日,修改稿收到日期为2007年11月7日。
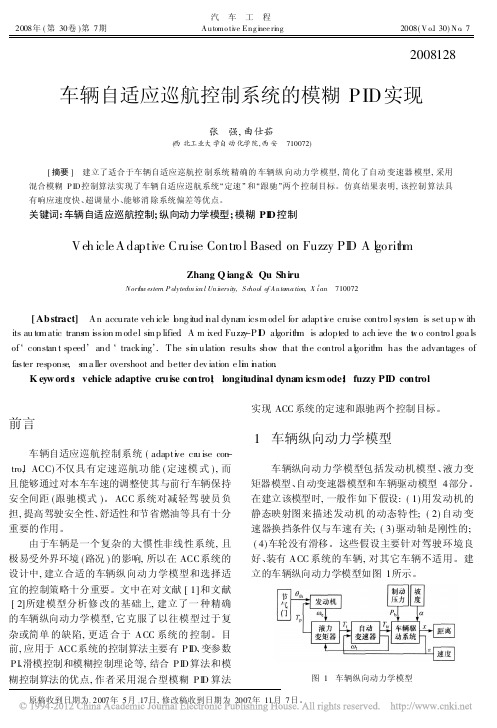
张 强,曲仕茹(西北工业大学自动化学院,西安 710072)[摘要] 建立了适合于车辆自适应巡航控制系统精确的车辆纵向动力学模型,简化了自动变速器模型,采用混合模糊P ID控制算法实现了车辆自适应巡航系统 定速 和 跟驰 两个控制目标。
仿真结果表明,该控制算法具有响应速度快、超调量小、能够消除系统偏差等优点。
关键词:车辆自适应巡航控制;纵向动力学模型;模糊PI D控制V eh icle A dapti ve Cruise Contro l Based on Fuzzy PI D A l gorit h mZhang Q iang&Qu ShiruNort hw estern P olytec hn ic a l Un i versit y,S c hool of Au to ma tion,X i an 710072[Abstract] An accurate veh icle l o ng itud i n al dyna m icsm odel for adapti v e cruise contro l syste m is set up w ithits au to m atic trans m ission m odel si m p lified.A m ixed Fuzzy-PI D algorith m is adopted to ach ieve the t w o contro l goa ls of constan t speed and tracking .The si m ulation results sho w that the control a l g orith m has the advantages of faster response,s m a ller overshoot and better dev iation e li m i n ation.K eyw ords:vehicle adaptive cruise contro;l longit udinal dynam icsm ode;l fuzzy PID control前言车辆自适应巡航控制系统(adapti v e cr u ise con-tro,l ACC)不仅具有定速巡航功能(定速模式),而且能够通过对本车车速的调整使其与前行车辆保持安全间距(跟驰模式)。
基于模糊PID控制的智能小车控制器的研制开题报告
[9] 王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究.机械科学与技术.2011,30(1),166-172.
[10赵庆松,苏敏.基于ARM的直流电机调速系统的设计与实现.ARM开发与应用.2007,173-175.
国内对于移动机器人的起步比较晚。从“七五”开始,我国的移动机器人研究开始起步,经过多年来的发展,已经取得了一定的成绩。清华大学智能移动机器人于1994年通过鉴定。涉及到五个方面的关键技术:基于地图的全局路径规划技术研究;基于传感信息的局部路径规划技术研究;路径规划仿真研究;传感技术、信息融合技术研究;智能移动机器人的设计和实现。香港城市大学智能设计、自动化及制造研究中心的自动导航车和服务机器人。中国科学院沈阳自动化研究所的AGV和防暴机器人。中国科学院自动化所自行设计、制造的全方位移动式机器人视觉导航系统。哈尔滨工业大学于1996年研制成功的导游机器人等。
3、设计(研究)的重点与难点,拟采用的途径(研究手段):
1、设计重点
模糊控制算法的实现。
2、设计难点
模糊子集的选取,模糊规则的确定,控制规则是模糊控制器的核心,控制规则的制定需要根据经验和直觉推理,将人的大量成功的控制策略经整理、加工提炼后,用输入、输出变量的模糊状态给以描述出来,对于初学者或者经验不足者,很难制定出达到预定结果的模糊规则。模糊推理及反模糊化。
毕业设计(论文)开题报告
题目:基于模糊PID控制的智能小车控制器研制
课 题 类 别: 设计 □ 论文 □
学 生 姓 名: 熊 康
学 号: 2008510501123
班 级: 自动化08-01班
专业(全称): 自动化
基于模糊控制的汽车自适应巡航系统设计
and improves the accuracy and stability of the cruise process.
列问题,不断增加的汽车数量所带来的交通拥堵、能
身参数会发生变化,易对车辆动力性能和整车控制
源消耗、空气污染等方面的问题日益突出,提升汽车
器操作功能产生不利影响,进而影响驾驶体验甚至
的电动化及智能化水平作为解决包括降低能源消
导致控制器失效,因此设计与研究巡航系统模型与
耗、确保行车过程安全稳定、减轻驾驶负担等问题的
巡航控制及高速行驶中的定速控制(引导车辆大于
航系统及跟车巡航控制过程具有复杂性、非线性及
安全车距或前方无引导车辆时以预设车速行驶)及
不确定性的特点,该文以分层控制原理为依据,对车
距离控制(前方有车辆行驶于安全车距内且其速度
辆 巡 航 控 制 系 统(CCS,恒 速 行 驶 系 统)主 要 构 成 为
-171-
《电子设计工程》2021 年第 9 期
2.2.2
输出语言变量
对输出语言变量进行定义(共包含 3 个),即比
航和跟车巡航间自适应切换,通过模糊 PID 控制确
保系统性能的实现 [13]。
例 系 数 调 校 参 数(由 Kp′表 示)、积 分 系 数 调 校 参 数
3.1
Ti′、Td′对应的语言值均可定义为{零(Z),小(S),中(M),
在对控制系统模糊规则进行制定时,需对包括
车加速度、
车间距及速度误差等)为依据对当前车辆所
基于PID算法的汽车巡航系统研究
基于PID算法的汽车巡航系统研究毕强【摘要】设计了基于freescale单片机的汽车巡航系统控制器,它能够判断设定车速和实际车速之间的差值,采用PID控制算法,对发动机节气门开度进行闭环控制。
设计了CAN总线接口,方便系统与其它车载电子系统的通信和信息交换。
该控制器结合适当的执行结构,就可以自动保持车辆的定速行驶,减轻了驾驶疲劳,提高了车辆的安全性。
%Aimed at the security and the comfort capability request, the car crmse system t Gt:5) based on tree scale single chip was designed. The system estimate the difference of the set car speed and the actual car speed, adopt the PID arithmetic, control the valve of the accelerograph in closed loop. And the CAN bus interface was designed, make the communication with other electronic system on the car conveniently. This system can keep the car speed automatically, lighten the drive tire, and improve the security of the car.【期刊名称】《九江职业技术学院学报》【年(卷),期】2012(000)002【总页数】4页(P12-14,9)【关键词】巡航控制;PID算法;Freescale单片机;CAN总线【作者】毕强【作者单位】九江职业技术学院,江西九江332007【正文语种】中文【中图分类】TM38随着国民消费水平的提高,人们对于汽车的舒适性的要求越来越高。
基于LabVIEW的模糊PID控制系统_何春华
仪表技术
# 57#
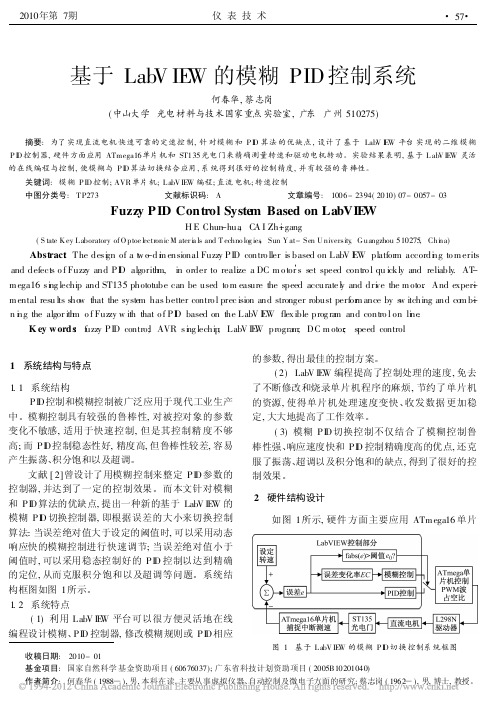
基于 LabV IEW 的模糊 PID 控制系统
何春华, 蔡志岗 ( 中山大学 光电材料与技术国家重点实验室, 广东 广州 510275)
摘要: 为了实现直流电机 快速可靠的定速控 制, 针对 模糊 和 P ID 算法 的优缺 点, 设计 了基于 LabV IEW 平台 实现 的二维 模糊 P ID 控制器, 硬件方面应用 ATmega16单片机和 ST135光电门来精确测量转速和驱动电机转动。实验结果表明, 基于 L abV IEW 灵活 的在线编程与控制, 使模糊与 P ID 算法切换结合应用, 系统得到很好的控制精度, 并有较强的鲁棒性。
D uk = uk - uk- 1
=K p
ek -
ek - 1 +
T Ti
ek
+
Td
ek
-
2ek- 1 + T
ek- 2
= A ek + B ek - 1 + C ek- 2
其中: A = K p
1+ T + Td Ti T
= K p + K i + K d;
B=
- K p ( 1+
2T d ) = T
作者简介: 何春华 ( 1988) ), 男, 本科在读, 主要从事虚拟仪器、自动控制及微电子方面的研究; 蔡志岗 ( 1962) ), 男, 博士, 教授。
# 58#
仪 表 技术
2010年第 7期
机和 ST 135光电门来精确测量转速和驱动电机转动。 ATm ega16单片机的主要功能有:
1) 用定时计数器 TC1捕捉中断, 测量电机转速。 2) 与 LabV IEW 通信收发测量和控制数据。 3) 用定时计数器 TC1产生并改变 10位 PWM 波 的占空比来控制直流电机的定速转动。 带缝隙的电机转轮通过 ST 135光电传感器可以产 生高低电平供给单片机捕捉中断测速; L 298N 可以放 大单片机的控制信号以驱动电机转动。