电流变阻尼器用于转子振动控制的实验研究
阻尼振动的实验研究与控制

阻尼振动的实验研究与控制阻尼振动是指在物体受到外力作用后,振动系统由于阻力的存在而逐渐减小振幅,并最终停止振动的过程。
阻尼振动是自然界中普遍存在的物理现象,它的研究对于理解和掌握振动现象具有重要意义。
本文将介绍阻尼振动的实验研究以及控制方法。
一、阻尼振动的实验研究1. 实验装置为了研究阻尼振动,需要搭建一个简单的实验装置。
常用的实验装置包括弹簧振子、摆锤和旋转振子等。
其中,弹簧振子是最常见的实验装置。
它由一根垂直的弹簧和一个质量块组成,质量块悬挂在弹簧的下端。
通过手动给质量块施加一定的初速度,可以观察到阻尼振动的现象。
2. 实验现象当给弹簧振子一个初速度后,可以观察到如下几个现象:(1)振幅的减小:随着时间的推移,振幅逐渐减小,最终趋近于零。
(2)频率的不变:无论振幅怎么变化,振动的频率保持不变。
(3)相位的变化:随着时间的推移,质量块的运动相位逐渐滞后。
3. 实验过程进行实验时,首先需要调整实验装置,使弹簧振子处于平衡位置。
然后,给质量块一个初速度,并记录下振幅、时间和质量块的位置。
通过记录并分析这些数据,可以得到振幅随时间变化的曲线,进而确定阻尼振动的特点。
二、阻尼振动的控制方法控制阻尼振动是工程中一个重要的问题,合理地控制阻尼可以提高系统的稳定性和工作效率。
以下介绍两种常见的控制方法。
1. 主动控制主动控制是通过外界力或调节元器件来控制阻尼振动。
其中,最常用的方法是通过施加控制力来抵消或减小系统的阻尼。
例如,在机械系统中,可以利用电磁力或液压力来施加外力,消除或减小阻尼效应。
在电气系统中,可以通过改变电阻、电容和电感等元器件的值来改变系统的阻尼特性。
2. 被动控制被动控制是利用特定的结构和材料性能来控制阻尼振动。
其中,最常见的方法是利用阻尼材料来吸收振动能量,从而减小阻尼效应。
例如,在建筑结构中,可以将阻尼材料嵌入结构中,用于吸收地震或风力振动的能量。
在声学系统中,可以利用吸音材料减小声波的反射和散射,从而减小阻尼振动的影响。
电流变阻尼器对汽车悬架结构振动的智能半主动控制

电流变阻尼器对汽车悬架结构振动的智能半主动控制在汽车悬架系统的设计和优化过程中,电流变阻尼器(Current VariableDamper,CVD)的应用越来越受到重视。
电流变阻尼器是一种能够根据车辆行驶状态自动调节悬架阻尼的装置,从而提高汽车的舒适性和操控性能。
本文将从理论和实践两个方面探讨电流变阻尼器对汽车悬架结构振动的智能半主动控制。
我们来了解一下电流变阻尼器的工作原理。
电流变阻尼器主要由弹簧、电阻片和可变电阻器组成。
当汽车行驶时,弹簧会受到压缩力的作用,导致阻尼系数发生变化。
可变电阻器通过改变其电阻值来调节弹簧的刚度,从而实现对悬架阻尼的调节。
与传统的机械式悬架相比,电流变阻尼器具有更好的调节性能和更低的能耗。
要实现电流变阻尼器对汽车悬架结构振动的智能半主动控制,我们需要解决一些技术难题。
首先是传感器的选择问题。
目前市场上常见的传感器有压力传感器、加速度传感器和陀螺仪等。
这些传感器可以实时监测汽车悬架系统的运动状态,为电流变阻尼器提供必要的控制信号。
但是,由于汽车行驶过程中的各种干扰因素,这些传感器的测量结果可能存在误差。
因此,在设计电流变阻尼器控制系统时,需要对这些传感器进行精确校准,以提高系统的稳定性和可靠性。
其次是控制算法的设计问题。
电流变阻尼器的控制目标是使悬架系统在各种工况下保持良好的稳定性和舒适性。
为了实现这一目标,需要设计一种高效、灵活的控制算法。
该算法应该能够根据车辆的实际行驶状态自动调整电流变阻尼器的参数,以满足不同的驾驶需求。
为了提高系统的响应速度和鲁棒性,还需要对控制算法进行优化和改进。
最后是系统集成问题。
电流变阻尼器虽然具有很多优点,但是将其与现有的汽车悬架系统相结合并不容易。
这需要对两者的结构和原理进行深入研究,以找到最佳的集成方式。
还需要考虑电流变阻尼器在实际应用中的安全性和可靠性问题,确保其不会对车辆和驾驶员造成任何危害。
电流变阻尼器对汽车悬架结构振动的智能半主动控制是一个复杂而又具有挑战性的课题。
磁流变阻尼器抑制转子系统振动试验_何立东

第35卷第5期2015年10月振动、测试与诊断Journal of Vibration,Measurement &DiagnosisVol.35No.5Oct.2015doi:10.16450/j.cnki.issn.1004-6801.2015.05.007磁流变阻尼器抑制转子系统振动试验*何立东, 王 锎, 黄秀金(北京化工大学化工安全教育部工程研究中心 北京,100029)摘要 针对大型旋转机械通过临界转速时振动过大及运行中故障频发等问题,搭建转子试验台,模拟启停机过程和碰摩、不对中故障。
不改变原有支撑形式,安装自主设计的磁流变阻尼器,在不停机的情况下,试验研究阻尼器抑制转子通过临界转速时振动过大及各类故障振动。
试验结果表明,阻尼器可以有效抑制转子系统临界转速附近的振动,降幅在60%以上;转子发生碰摩或不对中故障时,阻尼器可以降低其高倍频振动。
关键词 磁流变阻尼器;阻尼减振;不平衡;碰摩;不对中中图分类号 TH165+.3;TB535+.1引 言目前,能源、石化等领域的大型旋转设备普遍存在故障率高、无法长周期安全运行等问题。
解决故障的传统方法是停机进行维修,但频繁停机导致生产中断,经济损失严重。
常见的故障主要有质量不平衡、碰摩、不对中等。
其中,由于质量不平衡使转子无法安全通过临界转速[1]的问题在工程中十分常见。
磁流变液[2]是一种智能材料,基于磁流变液的阻尼器是性能优良的半主动控制装置,响应快、动态范围大,既有一定的被动控制能力,又可以实现主动控制,在汽车减振[3-5]、桥梁拉索减振[4]及楼房建筑减振等方面应用广泛。
而这种智能材料能否解决转子系统振动问题也引起广泛关注,汪建晓等[6-8]在这方面做了大量的研究,将一种剪切式磁流变阻尼器作为转子系统的支撑,研究对转子系统刚度和阻尼的影响,发现阻尼器可以大幅改变系统刚度,增大转子临界转速,从而降低了原来临界转速附近振动。
笔者设计了一种应用于转子系统的磁流变阻尼器,并搭建磁流变阻尼转子试验台。
阻尼实验研究阻尼对振动的影响
阻尼实验研究阻尼对振动的影响在物理学中,振动是一种对象周期性的来回运动。
在实际生活中,许多系统和设备都会受到振动的影响,其中阻尼是一种重要的现象。
本文将探讨阻尼对振动的影响,并介绍一种阻尼实验的研究方法。
一、引言振动是一个物体或系统围绕其平衡位置做周期性的运动。
在没有阻尼的情况下,振动将保持永恒的运动。
然而,在实际应用中,阻尼是难以避免的,并且会对振动产生重要影响。
二、阻尼对振动的影响1. 阻尼的定义与分类阻尼是指在振动过程中对振动物体的相对运动产生阻碍的力或现象。
根据阻尼的特性,可以将其分为以下几类:- 无阻尼振动:没有外界阻力的影响,系统能够永久地保持振动。
- 强迫振动:在周期性外力作用下,系统振动频率与外力频率相同。
- 欠阻尼振动:阻尼力较小,系统在振动后会经历一段减振过程,但最终回到平衡位置。
- 临界阻尼振动:当阻尼适中时,系统在振动后恢复到平衡位置需要的时间最短。
- 过阻尼振动:阻尼力较大,系统在振动后不能完全回到平衡位置。
2. 阻尼对振动的影响阻尼的存在会改变振动系统的特性,对振动的幅度、频率和周期等方面产生影响:- 阻尼会减小振动的幅度:振动会随时间减弱,直至停止运动。
- 阻尼会改变振动的频率:阻尼越大,振动频率越低。
- 阻尼会增加振动的周期:阻尼减弱了振动系统的回复速度。
三、阻尼实验研究方法为了研究阻尼对振动的影响,可以进行一种名为“阻尼实验”的实验。
以下是该实验的步骤:1. 实验材料和器材准备- 弹簧振子:用于模拟振动系统。
- 钟摆计时器:用于测量振动的周期。
- 阻尼装置:可调节振动的阻尼大小。
2. 实验步骤1)将弹簧振子悬挂在支架上,并保证其自由振荡无阻尼状态下。
2)调节阻尼装置,逐渐增加阻尼的大小,记录每次增加后的振动周期和振幅。
3)重复步骤2,直到观察到过阻尼的情况。
3. 实验结果分析根据实验数据,绘制阻尼大小与振动周期的关系图,并分析不同阻尼对振动的影响。
可以观察到阻尼越大,振动周期越长,振动幅度越小。
利用电流变阻尼器的索振动控制实验研究

这 3种 电压分 别代 表 3 激励 信 号 强度 。 个
2 模 型 实 验
2 1 实验 的安装 .
在不 同强 度 的激励 信 号 作用 下 和各种 电压作 用 于
测 量 结 果 . 6 2 5 2 . 3 5 1 0 7 6 0 . 8 2 5 8 . 9 5 1 5 . 4 . 7 7 6 0
对于 索一 阻尼 器 系统 , 随机 振 动 响应 的 测定 被用 来
研究 在不 同激 励力 水 平 和 各 种 施 加 的 电 压强 度 下 E R
文章编 号 :0193 (06 0—8 1O i0—712 0 )502 -2
图 1 索 阻尼器 模 型 系统
1 引 言
现代桥梁 日益 向着 大跨度 、 柔方 向发 展 , 代表 轻 其 桥 型是斜拉桥 、 索 桥 和 钢 管 混凝 土桥 。这 些桥 型 的 悬
一
Fi g l Exp rm e a e p ofs a — a e e i nl ls t t y c bl u
E R阻 尼器 时 , 索 的 传 递 函数 进 行 测 量 , 对 结果 如 图 2
及 图 3所示 。 电压 在 o 0 8 V 问 时 , 振 的 峰值 几 乎是 独 立 ~ .k 共
索 的模型 是按 比例取 自一 个 实际 索结 构 中。为 了 测量静 态 的张力 , 个力 传 感 器 被 固定 在 拉 索 底 部 固 一
频率 也列 于表 1 两 者进 行 了对 比。 ,
索振动 。 实验 中, 们 对 实 际 索 结 构 中 1 3 长 的 索 我 4m
电流变阻尼器减振机理及其在振动控制中的应用

电流变阻尼器减振机理及其在振动控制中的应用电流变液是一种极具发展前景和工程应用价值的智能材料。
性能良好的电流变液在电场的作用下能产生明显的电流变效应,即可在液态和类固态间进行快速可逆的转化,并保持粘度连续。
这种转变极为迅速,仅需几个毫秒且瞬时可控,能耗极小,因而可与微机结合,实现实时主动控制。
电流变技术在机械工程、汽车工程、控制工程和航空航天领域的应用范围非常广泛。
本项课题的研究得到了国家自然科学基金和航空科学基金的资助。
本课题的研究成果主要有:(1) 综述了电流变技术的发展和应用情况,研制出了性能较好的电流变液。
(2) 对电流变液的微观结构进行了分析,对电流变液中链的形成过程和原因进行了实验研究,发现链的多少、长短和粗细与液体的重量比和电场强度有关,对电流变液的力学特性和场强的关系进行了理论和实验研究。
(3) 设计了几种电流变减振器,通过对减振器的特性研究和参数估计表明:电流变减振器具有反应快、控制方便的特点,它在低频段具有明显的减振效果,并表现出非线性。
在低电场强度时,粘性阻尼占优,而在高电场强度时,库仑阻尼占优,且其有刚度的变化。
设计的多层极板式减振器比滑动极板式减振器有更宽的阻尼变化范围。
(4) 由于电流变液的反应快,它特别适合于需要快速反应的结构。
设计了转子振动控制用的摩擦板式电流变阻尼器,从理论和实验研究了其在转子振动控制中的有效性。
用电流变阻尼器能有效地抑制转子系统的一阶临界共振和突加不平衡响应,保证转子系统安全运行,这方面的工作具有较大的创新。
(5) 设计了多层挤压型电流变阻尼器,建立了电流变阻尼器的Reynolds方程,从理论和实验研究了其在转子振动控制中的有效性,特别是抑制转子系统的一阶临界共振和突加不平衡响应的有效性。
(6) 研究了电流变阻尼器控制悬挂系统振动的阻尼特性,通过激光全息测振分析了电流变液夹层板的动态特性,结果表明通过外加电场可有效地控制悬挂系统和电流变液夹层板的振动。
电流变体在结构工程振动控制中的应用研究
和 突破 , 为它排 除 了水 的影 响. 因 电磁 流 变液体 是
两相 E R流体 的进 一 步 发 展 , 目的在 于 提 高屈 服
应力 值. 工 合 成 粒 子 使 E 人 R流 体 走 上 可 预先 设 定 其性 能 的道路 , E 是 R流体 合成 的重 大 进展 . 强 电粘效 应 的 单 相 电粘 液 体 ( 晶及 强极 性 液 体 ) 液 是 为 了解决 两相 悬 浮液 中沉 淀问题 的一 个重要 改
第 2 第 3期 3卷
21 0 0年 7月
烟 台大 学学报 ( 自然科 学与 工程版 )
Ju a o at n e i N t a SineadE gneigE io ) or l f n U i r t n Y m v sy( a rl cec n nier dt n u n i
摘
要 :电流 变体 是 智 能材料 系统 中重要 的 驱动 器材 料 之 一. 文首 先 简单 回顾 了电流 本
变体及 其 工程 应 用 的研 究现状 , 对含 电流 变体 复合 材料 的研 究进展 进 行 了综合 论述 , 系 并
统 分析 了电流 变体 在 土木 工程 结构振 动控 制 领域 应 用 的 2种 类型 : 电流 变体 阻尼 器和 即
度 范 围. 无水 的 E 流 体 的 发 现 是 一 个 重 大 进 步 R
流体 ) 一 种 可 控 流 体 , 能 在外 加 电 场 作 用 下 是 是 迅速实 现液 体 一固体 性 质 转 变 的 一类 智 能 材 料 ,
它能感 知环境 ( 加 电场 ) 外 的变 化 , 且 根据 环 境 并
(9 一 , 16 ) 教授 , 4 博士生导师 , 从事混凝土材料及水工结构 方面研究
磁流变液阻尼器用于振动控制的理论及实验研究_汪建晓
第 2 期 汪建晓等 :磁流变液阻尼器用于振动控制的理论及实验研究 4 1
-速度关系如图 4(c)所示 。 阻尼力计算式为
Cpo﹒x -Fy ﹒x ≤-v1 ¨x >0
Cpr(﹒x -v0) -v1 ≤﹒x ≤v 2 ¨x >0
及 Fd =(■Pη + ■Pτ)Ap , 并令
Cpo
=12gη3LwpApAp
Fy
=
cτyLp g
Ap
(3)
得阻尼力 Fd 为
图 3 阻尼器的结构参数
由式(4)可以看出 , 阻尼力 Fd 由两部分组成 :一 部分 是 粘 性 阻 尼 Cpo﹒x , 另 一 部 分 是 库 仑 阻 尼 力 Fy sgn(﹒x)。该模型假定在屈服前材料是刚性的 , 且不
1 磁流变液阻尼器及其力学模型
1 .1 磁流变液阻尼器的基本原理
磁流变液阻尼器的工作模式主要有流动模 式和
剪切模式 , 如图 1 所示 。
流动模式的两极板固定 , 由于装置中存在压力差
而产生液体流动 。 该压力差可分为与磁场无关 的粘
性分量 ■Pη和由磁场引起的屈服应力分量 ■Pτ, 其 大小近似为[ 2]
Fd =
Cpo﹒x +Fy ﹒x Cpo﹒x +Fy ﹒x
≥v2 ¨x >0 ≥v1 ¨x <0
Cpr(﹒x +v0) -v2 ≤﹒x ≤v 1 ¨x <0
(8)
Cpo﹒x -Fy ﹒x ≤-v2 ¨x <0 其中引入了压缩屈服速度 v1 和拉伸屈服速度 v2 , 由下
流动 。因而 , 当作用于阻尼器的外力大小 |f(t)|<Fy 时 , 活塞杆的速度 ﹒x =0 。一旦施加到阻尼器上的力
基于磁流变阻尼器的转子系统振动随动控制_王锎
92
航"空"动"力"学"报
第 !" 卷
下的振幅及降幅通 电 状 态 下 振 动 相 对 无 电 流 状 态 下 振 动 的 降 低 幅 度 如 表 # 所 示 )
图 #" 转 子 系 统 实 验 台 C6P)#"b'<'>7]7<:U<:7<_:-4随 动 控 制 软 件 平 台 本文设计并开 发 了 基 于 阻 尼 器 的 采 集实 验
+,-)#$"%
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
文 章 编 号 "$$$./$00#$"%$".$$9#.$%" " " " " " " "0"1"$)"!##23)4-56)3,78)#$"%)$")$"$
基于磁流变阻尼器的转子系统 振动随动控制
3"5"$+6+5*4[+819$&51"%+*$8"-"%5$"'9&+*0"% 4&7%*5"2$I*"'"71-&'0&4,*$+
QB*M D,6LWa6.X'-PRS*M+6,-LG L,-P.(6-P
f:636-P5:]a,_'>,<'>]';L:,(<I V'-6<'>6-P,-X[:(;.>:4'\:>]';BX\,-4:X V:4I,-64,( ,-XW`K68U:-<Z'((:P:';V:4I,-64,(,-XW(:4<>64,(W-P6-::>6-P f:636-PG-6\:>76<]';ZI:U64,(Y:4I-'('P]f:636-P"$$$#1ZI6-,
磁流变阻尼器性能及振动控制
( a o a L brtr o R tr a A rmeh n s , N t n l oa y ooc f eo ca i i a o f r t c
‘0
磁流变阻尼器的性能可有 多种 数学模 型描
述闭, 这些数学模型基本上都由一组复杂的非线
性方程构成 , 虽能较好地描述磁 流变阻尼器 的性
尸角 一 U 一
xc /m
{ 一 找
能, 但求解不方便 , 给分析磁流变阻尼器的应用带 来一定的困难, 因而求出磁流变阻尼器的等效线
性阻尼系数是很有实际意义的。 基于这样的考虑, 本文采用能量法和梯形积分法计算 出了磁流变阻 尼器的等效线性阻尼系数, 其与输人电压和运动 幅值有关 , , 因此 改变输人电压大小, 就能控制磁 流变阻尼器的等效线性阻尼系数 , 从而达到控制 振动水平的目的。将磁流变阻尼器用于结构对基 础激励的振动控制, 本文得到了隔振的传递率和
第 1卷 9 20 04年
第3 期 6 月
航空动力学报
Jun l A rsae w r o ra o eop c P e f o
Vo. No 3 l1 9 . Jn 2 0 0 4 u.
文章编号 : 008 5 (0 4 0-350 10-0 520 )300-5
磁流变 阻尼器性能及振动控制
c 八N ・ /m) o a sc c /N ・ /m ・ o ( sc V) n k/ N ・ /m) o( sc
2 . 1 0
a/N/m) s( c a/ N/m ・ s( c V)
1 . 4 0
650 9. 330 6. 3 30 6. 310 0. 2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第11卷 第3期航空动力学报V o l111N o13 1996年7月Journa l of Aerospace Power Ju ly 1996电流变阻尼器用于转子振动控制的实验研究3西北工业大学 孟 光33 姚国治美国ABB公司燃汽轮机部 殷达章【摘要】 实验研究了电流变阻尼器在转子振动控制中的应用。
实验发现,电流变阻尼器的刚度及阻尼随外加电场强度的增加而增大,支承在电流变阻尼器上的转子系统的振幅在亚临界区及临界转速处随施加的电场强度的增加而减小,而在超临界处则随电场强度的增加而增大;系统的临界转速随电场强度的增加而升高。
电流变阻尼器提供的阻尼具有库仑阻尼和粘性阻尼的特点。
实验表明电流变阻尼器具有控振效果明显、瞬时可控、耗能小、频带宽及结构简单的特点。
主题词: 转子 电流 变液 振动 控制 分类号: O3281 前 言 电流变技术是当前国际上的高新技术,N iko lajsen等首次将电流变技术应用于转子振动控制,发现电流变阻尼器的阻尼减振效果很好且容易控制[1]。
T ichy[2]用电流变液体填充到挤压油膜阻尼器内,通过控制加在极板上的电场强度以达到控制转子振动的目的。
这一技术的关键是电流变液体,它是由细微的固体颗粒(尺度为1-100Λm)均匀分散在低导电率或绝缘的低粘度的母液中制得的悬浮体。
当在悬浮体中施加一电场时(~kV mm),液体的表观粘度增加几个数量级。
当电场强度达到一定值时,悬浮体由液态迅速向类固态转换,具有很大的抗剪切能力,当外加电场撤去后,又由类固态迅速回复到液态。
电流变液的这种特性使得由其做成的产品具有响应时间快、阻尼和刚度连续可调、能耗小和便于计算机控制等优点,在实现机电一体化的实时控制方面具有广阔的应用前景。
电流变液通常由三部分组成:(1)基础流体(分散介质):其要求是绝缘性好,零电场时粘度小。
目前最常用的为硅油;(2)固体微颗粒(分散相):要求粒度小,介电常数高。
目前常用的有有机半导体类、硅酸盐类、有机含水材料(如淀粉)、无机含水材料(如硅胶)及微晶等;(3)添加剂:固体或液体的表面活性剂。
性能良好的电流变液体应具有如下特性:零电场时的粘性系数小,屈服应力小;电流变效应明显,达到固化状态的电场强度低;基础流体的绝缘性好,化学性能稳定;不沉淀,无毒,无腐蚀,廉价,不含水。
在本文的研究中使用了两种自制的电流变液体,分别是用运动粘度为315×10-4m2 s和011×10-4m2 s的硅油与淀粉的混合物。
1995年8月收稿;1996年1月收到修改稿。
3本文系国家自然科学基金及航空科学基金资助项目33西北工业大学振动工程研究所 7100722 实验装置及实验过程和结果 图1为实验装置简图,其由转轴,悬臂盘及电流变阻尼器组成。
转轴1的直径为2154c m ,图1 实验转子简图长为6119c m ;转轴2直径为2154c m ,长为25136c m ;悬臂盘的直径为10116c m ,厚为1191c m 。
阻尼器由5块静止和6块涡动摩擦板组成,板间距为1159mm 。
静止板做为电压负极,涡动板做为电压正极。
通过改变鼠笼杆的数量和紧度可使实验转子的一阶临界转速在5000r m in 和8000r m in 之间变化。
测试设备由位移及光电传感器,示波器,FFT 动态信号分析仪,AD DA 板及计算机组成。
电流变阻尼器所需的电压由一计算机可控的高压放大器施加,可将计算机输出的0到+10V 的模拟信号放大为最大为5000V 及2mA 的控制信号。
实验中首先对传感器及测试设备进行了校准和标定,接着对系统轴承的刚度进行了静态测量。
测试结果表明水平和垂直方向的刚度相差不大,可近似为相等的。
2.1 锤击法测试结果 利用锤击法测试了系统的自由振动和自然频率。
在不加电流变液时,测量的水平方向的自然频率为101H z (6060r m in ),垂直方向的自然频率为10215H z (6150r m in )。
同样利用锤击法测试了加315×10-4m 2 s 和011×10-4m 2 s 的电流变液后,并对电流变阻尼器施加零到2500V 电压情况下系统的自然频率。
实验结果表明:加电流变液后,在不加电压或低电压时,谱图的尖峰不明显,激发出了多阶模态,较难识别出系统的一阶自然频率。
随着电压的升高,尖峰逐渐突出。
另外,随着电压的升高,系统的峰值频率(或一阶自然频率)增大,这是因为阻尼器的刚度增加造成的。
实验发现,在低频时,主要是在亚临界区,011×10-4m 2 s 电流变液的电流变效应要显著的多,这可能是因为011×10-4m 2 s 液体本身在零电压时的粘度较小。
实验中发现系统自由振动的衰减表现出了线性衰减和指数衰减两种情况。
由于线性衰减表示了库仑(Cou lom b )阻尼的作用,而指数衰减则表示了粘性阻尼的作用,因而电流变阻尼器同时具有这两种阻尼特性。
初步实验表明:在大位移时,库仑阻尼占主导地位;而在小位移时则是粘性阻尼占主导地位,这一结果有待进一步验证。
2.2 系统的不平衡响应 首先实验研究了不加电流变液时系统的升速过临界响应及在不同转速时的响应轨迹,测点位置在阻尼器左端。
最大振幅出现在6000r m in 附近,故系统的一阶临界为6000r m in ,这与锤击法测得的结果非常接近。
由于陀螺效应的影响,实际的临界转速应该比锤击法测得的(静态)临界转速高,这里出现相近的结果可能是因为转子转动后引起了轴承和鼠笼等结构的松动,从而减少了支承刚度,造成了临界转速的下降。
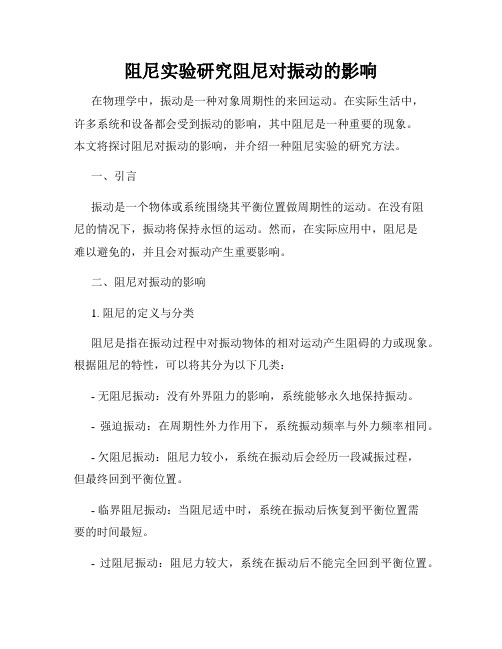
接着测试了加了315×10-4m 2 s 及011×10-4m 2662航空动力学报第 11 卷图2的(a )和(b )分别是用上述两种电流变液时,系统在临界转速处的响应轨迹随施加电压的变化。
从图2(a )可见:当施加一定电压时(如500V ),系统在临界处的峰值减小了,但继续升高电压,对减小峰值几乎没有效果,只是使轨迹的形状发生了改变。
这表明存在一个能提供最佳阻尼的电压值,也表明用315×10-4m 2 s 电流变液的阻尼器在高电压时阻尼已基本不随电压变化了,而刚度可能产生了非对称,从而引起了轨迹主轴发生了偏转。
从图2(b )可见:电图2 在临界转速为(a )6000r m in 和(b )5800r m in 时转子轨迹随电压的变化压越高,系统在临界转速处的振幅越小。
与在0V 时的振幅峰—峰值相比,系统在2500V 时的振幅峰—峰值减小了45.3%。
另外,该图及其它结果表明用011×10-4m 2 s 电流变液的阻尼器在临界转速处的阻尼效果基本与施加的电压成正比,即在临界转速5800r m in 时系统响应的振幅峰—峰值A 为:A =01382-(01172 2500)V (mm )。
图3(a )和(b )分别表示用两种电流变液时的系统的频响曲线(波德(Bode )图)。
从图3(a )可见:对于315×10-4m 2 s 的电流变液,增加电压可在亚临界区减小响应振幅,但在超临界区却使振幅增大。
此外,在亚临界区,电流变效应也不显著,这可能是因为315×10-4m 2 s 液体本身的粘度很大。
在超临界,由于电流变阻尼器刚度的增大,使得第二个峰值越来越明显,可见这时阻尼器的刚度随电压的增加起了主导作用。
需再次说明的是加装011×10-4m 2 s 电流变液时,由于将转子系统重新进行了装配,从而使系统的临界转速从6000r m in 降为5800rm in 。
从图3(b )可以看出:当用011×10-4m 2 s 电流变液时,系统的临界转速从零电压时的5800r m in 提高到2500V 时的6200r m in ,这是因为增加电压使阻尼器的刚度增加了,因而使临界转速升高。
系统响应的振幅在亚临界区随电压增加而减小,而在超临界区则随电压的增加而增大。
在第二峰值前,第一峰值(临界)后振幅随电压的增大主要是由于第一临界随电压的升高而造成的,而在第二峰值处振幅随电压的增大可能是由于阻尼器刚度随电压的增加造成的。
对比图3(a )可以看出,在亚临界区和临界转速处,用011×10-4m 2 s 液体的电流变阻尼器对响应振幅的阻尼作用随电压的变化要比用315×10-4m 2 s 液体的显著得多,可见其阻尼器的阻尼作用占主导地位,其电流变效应在亚临界区较明显。
实验表明:可以通过选择恰当的电流变液体,合理地设计电流变阻尼器使阻尼器具有最佳762第 3 期电流变阻尼器用于转子振动控制的实验研究3图3 转子升速时的频响曲线随电压的变化(a )315×10-4m 2 s 液体和(b )011×10-4m 2 s 液体的阻尼和刚度特性。
另外还发现:用011×10-4m 2 s 液体的电流变阻尼器提供的库仑阻尼要比粘性阻尼大,而用315×10-4m 2 s 液体的阻尼器则刚好相反。
通过简单的“开关”控制即可达到使振幅在全转速区内最小的目的,即开始先施加2500V 电压,这时响应沿2500V 的曲线,过临界后切断电源,响应则沿着0V 的曲线。
其特性可在瞬间(几个毫秒内)发生变化。
3 结 论 实验研究了用电流变阻尼器控制一悬臂转子的振动,实验结果表明:(1)电流变阻尼器在亚临界区和临界转速处的控振效果很好。
支承在电流变阻尼器上的悬臂转子的振幅在亚临界区和临界转速处随电压增加而减小,在超临界区则随电压增加而增大。
(2)电流变阻尼器的刚度随电压增加而增大,因而系统的临界转速随电压的增加而增高。
(3)电流变阻尼器提供的阻尼具有库仑阻尼及粘性阻尼的特点。
一般情况下,对零电压时粘度小的电流变液体或大位移时,库仑阻尼占主导地位;而对零电压时粘度较大的电流变液体或小位移时,粘性阻尼占主导地位。
这一结果有待进一步验证。
(4)可以通过选择合适的电流变液体使电流变阻尼器的减振效果达到最优。
良好的电流变阻尼器具有减振效果明显,瞬时可控,频带宽,耗能小等特点。
参 考 文 献1 N iko lajsen J L ,Hoque M S .A n E lectro -V iscous D amper fo r Ro to r A pp licati ons .T rans .A S M E ,J .of V ibrati on and A 2coustics ,1990,112:440-4432 T ichy J .Behavi o r of a Squeeze F il m D amper w ith an E lectro -R heo logical F luid .STL E .J .of T ribo logy ,T rans .,1993,36(1):127-133(责任编辑 王震华)862航空动力学报第 11 卷033Journal of A ero space Pow er V o l.11 ro tary sp eeds of the cage and the balls decrease and their sk iddings becom e seri ou s as the th ru st goes dow n,esp ecially to a s m all value.So the m in i m um th ru st p reload fo r p reven ti on of sk idding of the balls on the inner race can be esti m ated.Key W ords ro lling bearings M echan ical drives K inetic analysisINTER M ITTENT AND CHAOT I C PHENOM ENAIN A RUB I M PACT ROT OR S Y STE MChu Fule i,Feng Guanp i ng,Zhang Zhengsong(D ep t.of P recision Instrum en ts,Tsinghua U n iversity,B eij ing 100084)ABSTRACT V ib rati on characteristics of a rub i m pact ro to r system suppo rted on o il fil m bearings w ere investigated.E lastic i m p act and the Cou lom b type of fricti onal relati on2 sh i p w as assum ed.Ro tating speed and the system dam p ing w ere u sed as con tro l p aram eters to discover rou tes to and ou t of chao s and to study vari ou s fo r m s of peri odic、quasi-peri odic and chao tic vib rati on s.V ery rich typ es of chao tic vib rati on s w ere found fo r the m odel dis2 cu ssed.A lso the system m o ti on show s tw o differen t fo r m s of in ter m itten t phenom ena.O ne is the in terchange betw een peri odic and quasi-p eri odic vib rati on s.A no ther is betw een p eri2 odic and chao tic vib rati on s.V ib rati on featu res such as chao tic vib rati on,in ter m itten t p henom2 ena and b road-band of peri odic vib rati on can be effectively u sed to diagno se the rub i m pact fau lt w h ich often happen s in a ro to r system.Key W ords Ro to rs Chao s V ib rati on D am p ingEXPER I M ENTAL INVEST IGAT I ONON ROT OR V IBRAT I ON CONTROLB Y EL ECTRORHEOLOGI CAL DAM PERM eng Guang,Y i ng Dazhang,Yao Guozh i(Insitute of V ibra tion Eng ineering,N orthwestern p olytechn ica l U n iversity,X i’an 710072) ABSTRACT In th is pap er the E lectro rheo logical(ER)flu id and its characteris2 tics are in troduced b riefly and the app licati on of an ER dam per in ro to r vib rati on con tro l is studied exp eri m en tally.It is found that by increasing the app lied electrical field strength,the dam p ing and stiffness of ER dam per are increased,the vib rati on am p litude of the ro to r sys2 tem suppo rted on ER dam per is decreased in the sub-critical speed range and at the critical speed,and is increased in the super-critical sp eed range.T he critical speed of the ro to r sys2 tem can be changed by m ean s of the app lied electrical field strength.T he dam p ing p rovided by the ER dam p er has the p rop erties of bo th the Cou lom b dam p ing and the viscou s dam p ing. Experi m en tal resu lts show that the ER dam per has obvi ou s effect on vib rati on con tro l,and featu res in stan taneou s con tro l,little energy con sum p ti on and b road frequency range.B esides, it’s structu re is si m p le.Key W ords Ro to rs E lectric cu rren t R heo stats V ib rati on Con tro l acti on AN EXPER I M ENTAL STUDY OF HEAT TRANSFERB Y JET I M P INGE M ENT ON ROUGHENED SURFACEW ITH IN IT I AL CROSSFLOWZhang Da l i n,Chang Ha ip i ng,Han D ong(2nd D ep t.N anj ing U n iversity of A eronautics and A stronautics,N anj ing 210016)Sheng Rongchang(Zhuzhou P o wer P lan t R esea rch Institute,Zhuzhou 412002)ABSTRACT I m p ingem en t heat tran sfer from the rib roughened su rface w ith。