plc步进电机控制实验报告
PLC实验报告:实验七步进电机控制实验
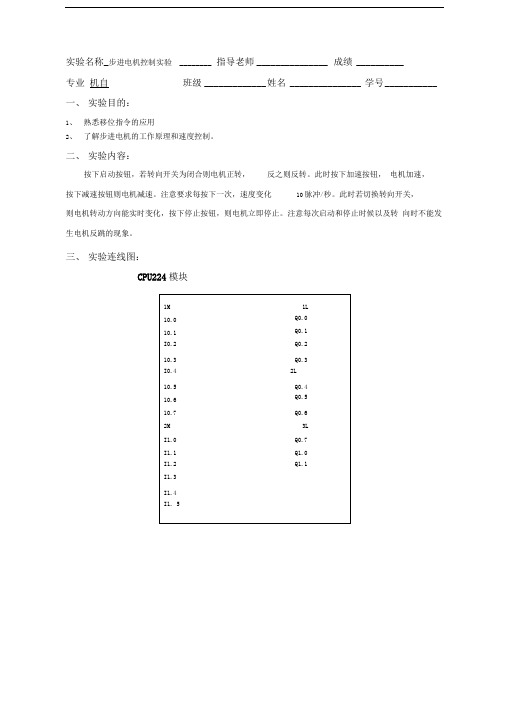
实验名称_步进电机控制实验 ________ 指导老师_______________ 成绩 __________专业机自班级_____________ 姓名_______________ 学号___________一、实验目的:1、熟悉移位指令的应用2、了解步进电机的工作原理和速度控制。
二、实验内容:按下启动按钮,若转向开关为闭合则电机正转,反之则反转。
此时按下加速按钮,电机加速,按下减速按钮则电机减速。
注意要求每按下一次,速度变化10脉冲/秒。
此时若切换转向开关,则电机转动方向能实时变化,按下停止按钮,则电机立即停止。
注意每次启动和停止时候以及转向时不能发生电机反跳的现象。
三、实验连线图:CPU224模块四、输入/输出地址分配及功能说明浙江大学城市学院实验报告纸IQ<□地址注释| 1 正展辂开关I142加谨按钮I0L13减速按樹I0.24 启动开关IQ.05D灯Q006两□0.17E灯□0.2B A灯Q0.39 D灯信号MIQ.010。
灯信号M0.111B灯信号M0.212纵丁信号M0.313移位信号M0.514变频信号M0.S五、实验程序NDV.W MDV.EEN ENO EN rununuIU OUT.■VW02tt10001 - IN匚LIT-MGO5-浙江大学城市学院实验报告纸网络4賈嫌信号| ISHRBEN ENDDATAS_GITN1 1移位信号・D好信斗VB2 -vl 网络5SMO.CI I A灯陽1 wf、1 1日灯博s 丿1 B灯c< j% wD灯育I ) 2D灯f \< J六、实验结论正丘转开关移位信号)启动畀关WC<=1D灯信号。
步进电机控制实训报告(3篇)

第1篇一、实训目的本次实训旨在通过实际操作,使学生掌握步进电机的原理、驱动方式及其在控制系统中的应用。
通过实训,培养学生动手能力、分析问题和解决问题的能力,提高学生对步进电机控制系统的理解。
二、实训时间2023年X月X日至2023年X月X日三、实训地点XX大学电气工程与自动化学院实验室四、实训内容1. 步进电机基本原理及驱动方式2. 步进电机驱动电路设计与搭建3. 步进电机控制系统编程与调试4. 步进电机应用案例分析五、实训过程(一)步进电机基本原理及驱动方式1. 步进电机原理:步进电机是一种将电脉冲信号转换为角位移或直线位移的电动机。
其特点是转速、转向可控,定位精度高,广泛应用于各种自动化控制系统中。
2. 步进电机驱动方式:步进电机驱动方式主要有以下几种:- 相绕组驱动:将步进电机绕组分为A、B、C三相,通过控制三相绕组的通断来实现步进电机的旋转。
- 单相驱动:只控制一个绕组,通过改变绕组中的电流方向来实现步进电机的旋转。
- 双相驱动:控制两个绕组,通过改变两个绕组中的电流方向来实现步进电机的旋转。
(二)步进电机驱动电路设计与搭建1. 驱动电路设计:根据步进电机型号和驱动方式,选择合适的驱动芯片,如A4988、DRV8825等。
设计驱动电路时,需要考虑以下因素:- 驱动芯片的选型:根据步进电机的工作电压、电流、转速等参数选择合适的驱动芯片。
- 电流限制电阻的选型:根据驱动芯片的电流限制能力,选择合适的电流限制电阻。
- 控制电路的设计:设计控制电路,实现步进电机的转速、转向控制。
2. 驱动电路搭建:根据电路设计图纸,搭建步进电机驱动电路。
主要包括以下步骤:- 搭建电源电路:为驱动芯片和步进电机提供稳定的电源。
- 搭建驱动芯片电路:连接驱动芯片与步进电机绕组。
- 搭建控制电路:连接控制电路与驱动芯片,实现步进电机的转速、转向控制。
(三)步进电机控制系统编程与调试1. 控制系统编程:根据实际需求,选择合适的编程语言和开发环境,编写步进电机控制系统程序。
plc实验报告册

题目:PLC控制步进电机驱动院系:时间:2011年5月23日——2011年5月27日成员:PLC控制步进电机驱动一、步进电机、脉冲与方向信号步进电机作为一种常用的电气执行元件, 广泛应用于自动化控制领域。
步进电机的运转需要配备一个专门的驱动电源, 驱动电源的输出受外部的脉冲信号和方向信号控制。
每一个脉冲信号可使步进机旋转一个固定的角度, 这个角度称为步距角。
脉冲的数量决定了旋转的总角度, 脉冲的频率决定了旋转的速度。
方向信号决定了旋转的方向。
就一个传动速比确定的具体设备而言, 无需距离、速度信号反馈环, 只需控制脉冲的数量和频率即可控制设备移动部件的移动距离和速度; 而方向信号可控制移动的方向。
因此, 对于那些控制精度要求不是很高的应用场合, 用开环方式控制是一种较为简单而又经济的电气控制技术方案。
另外, 步进电机的细分运转方式非常实用, 尽管其步距角受到机械制造的限制, 不能制作得很小, 但可以通过电机控制的方式使步进电机的运转由原来的每个整步分成m 个小步完成, 以提高设备运行的精度和平稳性。
控制步进电机电源的脉冲与方向信号源常用数控系统, 但对于一些在运行过程中移动距离和速度均确定的具体设备, 采用PLC (可编程控制器) 是一种理想的技术方案。
二、控制方案在操作面板上设定移动距离、速度和方向, 通过PLC 的运算产生脉冲、方向信号, 控制步进电机的驱动电源, 达到对距离、速度、方向控制的目的, 操作面板上的位置旋钮控制移动的距离, 速度旋钮控制移动的速度, 方向按钮控制移动的方向, 启停按钮控制电机的启动与停止。
在实际系统中, 位置与速度往往需要分成几挡, 故位置、速度旋钮可选用波段开关, 通过对波段开关的不同跳线进行编码, 可减少操作面板与PLC 的连线数量, 同时也减少了PLC 的输入点数, 节省了成本。
一个n 刀波段开关的最多挡位可达到2n。
在对PLC 选型前, 应根据下式计算系统的脉冲当量、脉冲频率上限和最大脉冲数量。
PLC步进电机实训报告
前言本次实验的内容是完成“步进电机控制”的方法,用本学期学过的欧姆龙PLC知识完成,并且实现仿真,得出任务书上所要求的功能步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
目录一、PLC的概述 (3)1、PLC的发展历史 (3)2、PLC的定义 (3)3、PLC的几种流派 (3)4、PLC的优点和应用 (3)二、CP1H的主要编程资源 (3)三、PLC项目的开发过程 (4)四、步进电机的输入和输出点 (4)五、使用CX-PROGRAMMER编写程序 (4)六、总结 (8)一、PLC的概述1、PLC的发展历史PLC的产生源于汽车。
20实际60年代后期,汽车型号更新速度加快。
原先的汽车制造生产线使用的继电器控制系统,尽管具有原理简单、使用方便、操作直观、价格便宜等诸多优点,但由于它的控制逻辑元器件的布线方式来决定,缺乏变更控制过程的灵活行,因此不能满足用户快速改变控制方式的要求。
1968年美国通用汽车公司提出取代继电器控制装置的要求。
1969 年,美国数字设备公司研制出了第一台可编程控制器PDP—14 ,在美国通用汽车公司的生产线上试用成功,首次采用程序化的手段应用于电气控制,这是第一代可编程序控制器,称Programmable,是世界上公认的第一台PLC。
1969年,美国研制出世界第一台PDP-14。
1971年,日本研制出第一台DCS-8。
1973年,德国研制出第一台PLC。
1974年,中国研制出第一台PLC。
2、PLC的定义可编程控制器是一种数字运算操作的电子系统,专为工业环境下的应用设计。
PLC控制步进电机实验报告

广东技术师范学院实验报告
学院: 专业: 班级: 成绩:
姓名:
学号:
组别:
组员:
实验地点:
实验日期:
指导教师签名:
实验 (3) 项目名称: PLC 控制四相步进电机
1.实验项目名称
PLC 控制四相步进电机 2.实验目的和要求
(1)掌握功能指令的用法
(2)掌握步进电机步进控制程序的设计 3.主要仪器设备
(1)DICE-PLC01可编程序控制器实验箱1台 (2)编程电缆1根 (3)连接导线若干 4.实验内容及步骤
(1)控制要求
四相步进电机按四相八拍运行。
按下启动按钮、正转按钮、快速按钮时,首先A 相通电(A 灯亮),然后按照A →AB →B →BC →C →CD →D →DA →A →AB ……循环下去,每个状态持续5秒钟。
当按下启动按钮、反转按钮、慢速按钮时,首先A 相通电(A 灯亮),然后按照A →AD →D →DC →C →CB →B →BA →A →AD ……循环下去,每个状态持续10秒钟。
当按下停止按钮时,步进电机完成一个循环后停止。
图1 四相步进电机控制示意图
参考实验接线表见表1,可以修改试验模块对应的主机编号。
表1 参考实验接线图
(2)确定输入、输出端口,连接好导线,并编写程序
(3)编译程序,无误后下载至PLC主机的存储器中,并运行程序
(4)调试程序,直至符合设计要求
5.实验梯形图
请画出你的实验接线表和程序梯形图(在快速正转、慢速正转、快速反转、慢速反转四种状态中至少要包括两种状态)。
PLC控制步进电机正反转实验
第 1 章PLC控制步进电机正反转实验1.1实验目的1、了解PLC的理论与原理;2、掌握PLC编程与操作方法。
3、了解接近传感器的使用方法1.2实验设备1、三菱PLC编程电缆及安装好三菱编程软件的计算机一台;2、模块化柔性制造系统一套。
1.3实验原理料库旋转台是依靠步进电机控制的,高精度旋转模块。
依靠PLC 自身含有的脉冲单元,发出驱动脉冲给步进电机驱动器。
驱动器接收到该脉冲以后,根据所发脉冲的频率和数量驱动步进电机向相应的方向旋转。
1、步进电机步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
现在比较常用的步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)和单相式步进电机等。
永磁式步进电机永磁式步进电机一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进电机反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。
步进系统实验报告
一、实验目的1. 理解步进电机的工作原理及驱动方式;2. 掌握步进电机控制系统设计方法;3. 熟悉步进电机控制程序编写及调试;4. 学会步进电机在不同应用场景下的应用。
二、实验环境1. 实验设备:步进电机驱动器、步进电机、PLC编程软件、计算机;2. 实验软件:PLC编程软件(如Siemens Step 7、Allen-Bradley RSLogix等);3. 实验环境:实验室。
三、实验内容1. 步进电机驱动原理及驱动方式;2. 步进电机控制系统设计;3. 步进电机控制程序编写及调试;4. 步进电机在不同应用场景下的应用。
四、实验步骤1. 步进电机驱动原理及驱动方式(1)步进电机的工作原理:步进电机是一种将电脉冲信号转换为角位移的电动机,其角位移与脉冲数成正比。
步进电机主要由转子、定子和脉冲发生器组成。
转子由永磁体和线圈组成,定子由铁芯和线圈组成。
(2)步进电机的驱动方式:步进电机的驱动方式主要有两种,即相激式和步进驱动器驱动式。
2. 步进电机控制系统设计(1)控制系统硬件设计:根据实验需求,选择合适的步进电机驱动器和步进电机。
将驱动器与PLC连接,通过PLC输出控制信号。
(2)控制系统软件设计:编写步进电机控制程序,实现步进电机的启动、停止、正转、反转、速度调节等功能。
3. 步进电机控制程序编写及调试(1)编写步进电机控制程序:使用PLC编程软件编写步进电机控制程序,实现以下功能:- 启动/停止控制;- 正转/反转控制;- 速度调节控制;- 定位控制。
(2)调试步进电机控制程序:将编写好的步进电机控制程序下载到PLC中,进行调试,确保程序正常运行。
4. 步进电机在不同应用场景下的应用(1)步进电机在工业自动化领域的应用:步进电机在工业自动化领域有广泛的应用,如数控机床、机器人、自动化生产线等。
(2)步进电机在办公自动化领域的应用:步进电机在办公自动化领域也有广泛应用,如打印机、复印机、扫描仪等。
步进电机正反转实验报告

一、实验名称:
步进电机正反转训练
二、控制要求
要求实现电机的正转三圈, 反转三圈, 电机正转和反转的频率可不相同, 然后这样循环3次, 3次后电机停止转动。
三、PLC I/O地址分配表
PLC的I/O地址连接的外部设备
Y0 电机转向输出点控制转速点CP
Y1 电机的转速输出点控制转向点CW
四、程序梯形图
五、程序分析:
M11.M12、M13的波形图M21.M22.M23的波形图
电机正转的频率是20赫兹, 通过MOV指令送到D5中, 在电机正传三圈后, 电机反转, 反转的频率是40赫兹, 通过MOV指令送到D5中。
电机正转3次, 反转2次, 再通过M23得电进入正转, 重复上面的循环, 即电机正转后再反转, M23才得电一次, 所以可以加一个M23控制一个计数器计数, 当计数器计数到3时, 再通过计数器的常闭开关把M10线圈断电, 从而实现电机停止。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PLC步进电机控制实验报告
引言
在工业控制领域中,步进电机是一种常用的驱动设备。
为了实现对步进电机的
精确控制,我们采用了PLC(可编程逻辑控制器)作为控制器。
本文将详细介绍PLC步进电机控制实验的步骤和结果。
实验目的
本实验旨在通过PLC控制步进电机,实现对电机运动的精确控制。
具体实验目标如下: 1. 学习PLC的基本原理和编程方法; 2. 掌握步进电机的工作原理及其控
制方法; 3. 设计并实施一个简单的步进电机控制系统。
实验设备
本实验使用的设备包括: - PLC控制器 - 步进电机 - 电源 - 开关 - 传感器
实验步骤
步骤一:PLC编程
1.打开PLC编程软件,并创建一个新的项目。
2.配置PLC的输入输出模块,并设置相应的IO口。
3.编写PLC的控制程序,实现对步进电机的控制逻辑。
4.调试程序,确保程序的正确性。
步骤二:步进电机的接线
1.将步进电机的驱动器与PLC的输出模块连接。
2.将步进电机的电源与PLC的电源模块连接。
3.连接步进电机的传感器,以便监测电机的运动状态。
步骤三:实验验证
1.通过PLC的编程软件,将编写好的程序下载到PLC控制器中。
2.打开PLC电源,确保PLC控制器正常工作。
3.通过PLC的输入模块输入控制信号,观察步进电机的运动情况。
4.通过传感器监测步进电机的运动状态,并与编写的控制程序进行比较。
实验结果
通过本次实验,我们成功实现了对步进电机的精确控制。
控制程序的设计使步进电机按照预定的速度和方向运动,并且可以根据需要随时改变运动状态。
同时,通过传感器的监测,我们可以及时获取步进电机的运动信息,确保系统的稳定性和安全性。
实验总结
本实验通过PLC控制步进电机,深入了解了PLC编程的基本原理和步进电机的工作原理。
通过实践,我们掌握了PLC编程的方法和步进电机控制的技巧。
在实际应用中,PLC控制步进电机具有广泛的应用前景,可以在自动化生产线、机械加工等领域中发挥重要作用。
参考文献
[1] PLC步进电机控制实验教学单元.(2018)。
电动技术与设备,34(1),157-160。
[2] 张三等. (2019). 工业控制技术与应用实验. 机械工业出版社.
以上是我们PLC步进电机控制实验的详细报告。
通过本实验,我们对PLC的使用有了更深入的了解,并且成功实现了对步进电机的精确控制。
希望本实验能给读者带来一定的启发,并对相关领域的研究和应用有所帮助。