DSP硬件开发平台设计
DSP处理器软-硬件开发工具简介

随着DSP处理器的功能不断强化和系统开发周期不断缩短,设计和调试DSP系统越来越依赖于DSP开发系统和开发工具,图2为DSP处理器开发流程图.
虽然厂家不同,但提供的开发调试工具大致类同,一般有下列几种:
C语言编译器(C Compiler)
一般厂家为了开发DSP系统方便、减小编写汇编程序的难度,都提供了高级语言设计方法:一般是C语言。开发系统针对DSP库函数、头文件及编写的C程序,自动生成对应的汇编语言,这一步称为C编译。C编译器通常符合ANSI
C标准,可以对编写的程序进行不同等级的优化,以产生高效的汇编代码;C编译器还具有对存储器的配置、分配及部分链接功能;并应具有灵活的汇编语言接口等多种功能。
这是由厂家提供的一个包含DSP、存储器、常用接口电路的通用电路板和相应软件的软/硬件系统。通常有两种形式,一种是电路板卡接到计算机。这些都是通过计算机的控制端口来控制DSP的运行,并且有简单的DSK(DSP
starter Kit)入门套件,和较为复杂的EVM(Evaluation
Module)评估模块等。这些都有助于初学者熟悉和使用DSP处理器的应用,也可以作为程序的初步运行对象,方便调试。
随着DSP应用范围的扩大、处理能力的加强以及DSP更新速度的加快,DSP处理系统越来越复杂,对设计者来说难度也越来越大,为此有的厂家已产生出一定标准,依据标准来设计生产电路板级DSP处理模块,同时为这种标准模块提供丰富的软件开发系统和算法库。其中典型的如TMS320C4X和SDSP2106X,它们可以通过通信口和全局总线插座,将若干个模块安装在母板上,方便地组成多处理器系统。这种模块化设计降低了硬件设计难度,减少了硬件设计时间,有利于更高效的开发DSP系统。
DSP硬件开发
DSP系统的硬件设计又称为目标板设计,是在考虑算法需求、成本、体积和功耗核算的基础上完成的,一个典型的DSP目标板主要包括:DSP芯片及DSP基本系统程序和数据存储器数/模和模/数转换器模拟控制与处理电路各种控制口和通信口电源处理电路和同步电路系统硬件设计过程:第一步:确定硬件实现方案;在考虑系统性能指标、工期、成本、算法需求、体积和功耗核算等因素的基础上,选择系统的最优硬件实现方案。
第二步:器件的选择;一个DSP硬件系统除了DSP芯片外,还包括ADC、DAC、存储器、电源、逻辑控制、通信、人机接口、总线等基本部件。
① DSP芯片的选择首先要根据系统对运算量的需求来选择;其次要根据系统所应用领域来选择合适的DSP芯片;最后要根据DSP的片上资源、价格、外设配置以及与其他元部件的配套性等因素来选择。
② ADC和DAC的选择A/D转换器的选择应根据采样频率、精度以及是否要求片上自带采样、多路选择器、基准电源等因素来选择;D/A转换器应根据信号频率、精度以及是否要求自带基准电源、多路选择器、输出运放等因素来选择。
③存储器的选择常用的存储器有SRAM、EPROM、E2PROM和FLASH等。
可以根据工作频率、存储容量、位长(8/16/32位)、接口方式(串行还是并行)、工作电压(5V/3V)等来选择。
④逻辑控制器件的选择系统的逻辑控制通常是用可编程逻辑器件来实现。
首先确定是采用CPLD还是FPGA;其次根据自己的特长和公司芯片的特点选择哪家公司的哪个系列的产品;最后还要根据DSP的频率来选择所使用的PLD器件。
⑤通信器件的选择通常系统都要求有通信接口。
首先要根据系统对通信速率的要求来选择通信方式。
然后根据通信方式来选择通信器件。
一般串行口只能达到19kb/s,而并行口可达到1Mb/s 以上,若要求过高可考虑通过总线进行通信;⑥总线的选择常用总线:PCI、ISA以及现场总线(包括CAN、3xbus等)。
可以根据使用的场合、数据传输要求、总线的宽度、传输频率和同步方式等来选择。
dsp硬件设计课程设计
dsp硬件设计课程设计一、教学目标本课程的教学目标是使学生掌握DSP硬件设计的基本原理和方法,培养学生进行DSP硬件系统设计和实现的能力。
具体目标如下:1.掌握DSP芯片的基本结构和原理。
2.了解DSP硬件设计的基本流程和步骤。
3.熟悉DSP系统的硬件架构和关键模块。
4.能够使用DSP芯片进行硬件系统设计。
5.能够进行DSP系统的硬件调试和验证。
6.能够分析和解决DSP硬件设计中遇到的问题。
情感态度价值观目标:1.培养学生的创新意识和团队合作精神。
2.培养学生对DSP硬件设计的兴趣和热情。
3.培养学生对科技发展的关注和对工程实践的重视。
二、教学内容本课程的教学内容主要包括以下几个部分:1.DSP芯片的基本结构和原理:介绍DSP芯片的内部结构、工作原理和特性。
2.DSP硬件设计的基本流程和步骤:讲解DSP硬件设计的过程,包括需求分析、硬件架构设计、硬件电路设计、硬件调试和验证等。
3.DSP系统的硬件架构和关键模块:介绍DSP系统的硬件架构,包括中央处理单元、存储器、输入输出接口等关键模块。
4.DSP硬件设计的实践案例:通过实际案例分析,使学生掌握DSP硬件设计的方法和技巧。
三、教学方法本课程的教学方法将采用多种教学手段相结合的方式,以激发学生的学习兴趣和主动性。
1.讲授法:通过教师的讲解,使学生掌握DSP硬件设计的基本原理和方法。
2.讨论法:通过分组讨论和实践案例的分析,培养学生的思考能力和团队合作精神。
3.实验法:通过实验操作,使学生熟悉DSP硬件设计的实践过程和技巧。
四、教学资源本课程的教学资源包括教材、参考书、多媒体资料和实验设备等。
1.教材:选择适合本课程的教材,为学生提供系统的学习资料。
2.参考书:提供相关的参考书籍,为学生提供更多的学习资源。
3.多媒体资料:制作课件和教学视频,以图文并茂的形式展示教学内容。
4.实验设备:提供DSP实验板和相关的实验设备,为学生提供实践操作的机会。
五、教学评估本课程的教学评估将采用多元化评估方式,全面客观地评价学生的学习成果。
DSP开发环境和流程的简单例程
图1-3典型的软件开发流程图
1.2.3硬件仿真和实时数据交换
TI DSPs提供在片仿真支持,它使得CCS能够控制程序的执行,实时监视程序运行。增强型JTAG连接提供了对在片仿真的支持,它是一种可与任意DSP系统相连的低侵扰式的连接。仿真接口提供主机一侧的JTAG连接,如TI XSD510。为方便起见,评估板提供在板JTAG仿真接口。
图2-2装载程序
图2-3反汇编(Disassembly)窗口
现在可以开始运行我们的程序:在主菜单中单击“Debug”,选择“Go Main”,让程序从主函数开始执行。程序会停在main()处,并会有一个黄色的箭头标记当前要执行的C语言代码。如果希望同时看到C语言代码和对应编译生成的汇编代码,在主菜单中单击“View”,选择“Mixed Source/ASM”,此时会有一个绿色的箭头量标记当前要执行的汇编代码,如图2-4所示。
此时,在浅灰色显示的汇编指令上单击鼠标,然后按F1键,CCS会对该汇编指令进行搜索并弹出帮助窗进行解释。可以利用该功能来了解不熟悉的汇编指令。
在主菜单中单击“Debug”,选择“Run”,或单击工具条图标(Run),让程序全速执行。在主菜单中单击“Debug”,选择“Halt”,或单击工具条(Halt),让程序退出运行。
工程窗口用来组织用户的若干程序构成一个项目,用户可以从工程列表中选中需要编译和调试的特定程序。在源程序编译/调试窗口中用户既可以编译程序又可以设置断点、探针,调试程序。反汇编窗口可以帮助用户查看机器指令,查找错误。内存和寄存器显示窗口可以查看、编辑内存单元和寄存器。图形显示窗口可以根据用户需要直接或经过处理后显示数据。用户可以通过主菜单Windows条目来管理窗口。
DSP试验完整系统硬件设计

DSP试验完整系统硬件设计确定硬件设计方案,器件选择,原理图设计,PCB板设计,硬件调试1,最小系统设计就是满足DSP运行的最小硬件组成:通常采用低电压设计,双电源供电,即内核电源CVDD(为芯片的内部逻辑提供电压,CPU,时钟电路,所有外设逻辑,1.6V,与3.3相比,课大大降低芯片功耗)和I/O电源DVDD(3.3V,直接与外部低电压器件进行接口,不需要额外的电平转换电路)。
电压转换电路:使用LDO稳压器(5V-3.3V),使用齐纳二极管低成本系统,使用整流二极管,使用开关稳压管,电压比较器,等等。
书上介绍的有MAX748A(5转3.3),TPS7301(5转1.6V),TPS767D301来实现双电源(5转3.3和5转1.6都有)。
咱们系统中应用的是TLV1117来实现电压转换,这是为什么?5V供电外接电解电容和电容用意何在,5V的电通过电阻给电解电容进行充电,电容两端的电会由0V慢慢的升到4V左右(此时间很短一般小于0.3秒),我觉得应该是为了稳压吧,让输入电压稳定在5V。
74LVC04是一个反相器,A为输入,Y为输出,EXT_RESET为1A输入,P4的一个引脚输出口。
EXT_RESET复位信号也送入CPLD(XC9536XL有DSPRST引脚,接主芯片的91),作为系统的复位信号之一。
EXT_RESET反相后,作为SMR接入TL16C550C 异步通信芯片的MR(主复位(高电平有效),清除最ACE 寄存器和置位各种电平的输出信号),也就是说在复位有效时,是不能进行异步串口通信的,这一点说明了复位信号不可屏蔽,在任何时候都能对系统进行复位。
TCK测试时钟输入引脚,TDI测试数据输入信号,TDO测试数据输出信号,TMS测试方式选择信号,TRST测试复位信号,EMU0仿真器中断0引脚,EMU1仿真器中断1引脚/关闭所有输出引脚。
TRST为高事,改引脚作为仿真系统的中断信号,。
为低时,所有输出设置为高阻状态。
基于DSP的永磁同步电机控制系统硬件设计

基于DSP的永磁同步电机控制系统硬件设计胡宇;张兴华【摘要】以小功率永磁同步电机(PMSM)为研究对象,结合数字信号处理器TMS320F2812功能特点,给出了一套PMSM驱动控制系统硬件设计方案.详细阐述了功率驱动主电路、反馈信号检测电路以及供电电路的设计,介绍了主要元器件选型和参数计算方法.基于设计的硬件平台,对PMSM调速控制系统进行了测试.试验结果表明,所设计的控制系统硬件设计可靠、性能稳定、控制精度高.%Based on the controlled object of small power permanent magnet synchronous motor (PMSM),combined with the main features of digital signal processor TMS320F2812,an overall hardware design scheme had been put forward for the PMSM drive control system.Design of the power driven main circuit had illustrated,signal detection circuit and power supply circuit in detail,meanwhile introduced the main components selection and parameters calculation method.Based on the designed hardware platform,the control system of PMSM had been performed a functional test.Experimental results showed that the hareware design of control system had good reliability with stable performance and high control precision.【期刊名称】《电机与控制应用》【年(卷),期】2017(044)012【总页数】7页(P19-24,80)【关键词】永磁同步电机;功率驱动主电路;信号检测电路【作者】胡宇;张兴华【作者单位】南京工业大学电气工程与控制科学学院,江苏南京211816;南京工业大学电气工程与控制科学学院,江苏南京211816【正文语种】中文【中图分类】TM351永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)因其体积小、损耗低、功率密度高和效率高等优点,在机械制造、工业控制、航空航天等领域得到广泛应用[1]。
基于DSP28355的简易信号源硬件设计
图2核心板电路原理图
2.3.2 D/A方案选择和电路设计
D/A转换器,简称DAC,它是把数字量转变成模拟量的器件。DAC主要由数字寄存器、模拟电子开关、位权网络、求和运算放大器和基准电压源(或恒流源)组成。主要特性指标包括:分辨率、线性度、转换精度、转换速度。在本系统中,主要关心两个问题,首先就是D/A的分辨率,其次就是采用串行还是并行的D/A。其中分辨率主要取决于芯片的位数,如N位D/A转换器,其分辨率为1/(2^N-1),位数越高,分辨率就越高,转换就更精确。这里有两种方案,用表格的形式做了一个简单的比较,如下表3所示:
因此在本系统中,决定选用TI公司的一款TMS320C28X系列浮点DSP控制器TMS320F28335型数字信号处理器作为波形发生和系统控制处理芯片。28335具有150MHz的高速处理能力,具备32位浮点处理单元,6个DMA通道支持ADC、McBSP和EMIF,有多达18路的PWM输出,其中有6路为TI特有的更高精度的PWM输出(HRPWM),12位16通道ADC。与前代DSP相比,平均性能提高50%,并与定点C28x控制器软件兼容,从而简化软件开发,缩短开发周期,降低开发成本。
引脚功能说明如下表4:
表4 TLV5638引脚说明
引脚编号
引脚名称
引脚功能
1
DIN
串行数据输入
2
SCLK
串行时钟输入
3
/CS
片选信号,低有效
4
OUTA
A通道模拟电压输出
基于国产DSP的天文导航系统硬件设计
• 148•针对天文导航数据量大,处理速度要求高等特点,本文介绍了基于国产数字信号处理器FT-C6713/400的硬件设计方案,使用FPGA 及MCU 配合完成接口通信及星敏感器电机控制功能。
经测试,该系统能满足天文导航的需求,实现恒星目标的准确捕获及跟踪。
天文导航以空间位置已知、不可毁灭的自然天体作为导航信标,通过对天体的观测来确定飞行器的位置、航向和姿态等信息的导航技术。
具有隐蔽性好,工作稳定,定位、定向精度高,无累积误差等优点。
为了扩展天文导航定位技术的应用领域,天文导航设备目前正向体积小的嵌入式系统方向发展。
本文介绍了一种基于国产数字信号处理器(D S P )F T-C6713/400的天文导航系统硬件设计方案,DSP 是一种专门针对数字信号进行实时高速解算的特殊处理器,具有极强的处理性能、高度的灵活性和可编程性,同时外围集成了丰富的片上外设,可以方便的实现与外围设备的接口,缩小系统硬件平台的体积。
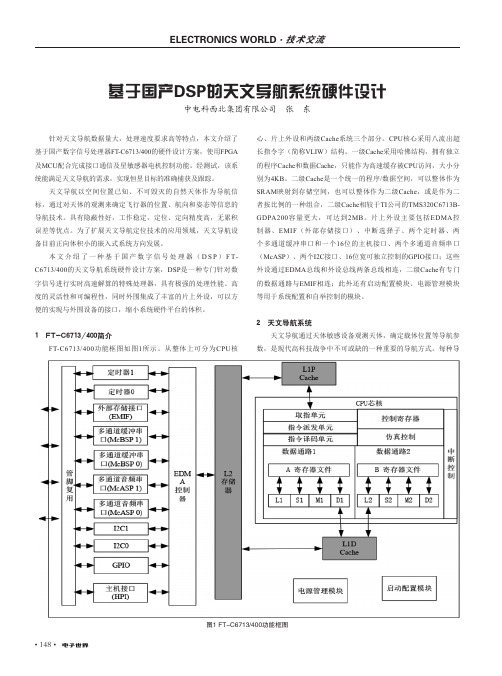
1 FT-C6713/400简介FT-C6713/400功能框图如图1所示。
从整体上可分为CPU 核心、片上外设和两级Cache 系统三个部分。
CPU 核心采用八流出超长指令字(简称VLIW )结构。
一级Cache 采用哈佛结构,拥有独立的程序Cache 和数据Cache ,只能作为高速缓存被CPU 访问,大小分别为4KB 。
二级Cache 是一个统一的程序/数据空间,可以整体作为SRAM 映射到存储空间,也可以整体作为二级Cache ,或是作为二者按比例的一种组合,二级Cache 相较于TI 公司的TMS320C6713B-GDPA200容量更大,可达到2MB 。
片上外设主要包括EDMA 控制器、EMIF (外部存储接口)、中断选择子、两个定时器、两个多通道缓冲串口和一个16位的主机接口、两个多通道音频串口(McASP )、两个I2C 接口、16位宽可独立控制的GPIO 接口;这些外设通过EDMA 总线和外设总线两条总线相连,二级Cache 有专门的数据通路与EMIF 相连;此外还有启动配置模块、电源管理模块等用于系统配置和自举控制的模块。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2010 - 2011学年第 2 学期《DSP芯片的原理与开发应用》题目:DSP硬件开发平台设计班级:学号:姓名:指导教师:成绩:基于DSP E1-16XS的硬件开发平台设计引言嵌入式系统硬件的核心是各种类型的嵌入式处理器,目前全世界嵌入式处理器的品种已经超过1000多种,流行体系结构有30多个系列,嵌入式处理器一般可以分为嵌入式微处理器、嵌入式微控制器、嵌入式DSP处理器和嵌入式片上系统。
与标准微处理器相比,嵌入式微处理器只保留了和嵌入式应用有关的功能,并且为了满足嵌入式应用的特殊要求,在工作温度、抗电磁干扰、可靠性等方面都做了各种增强。
DSP嵌入式系统是DSP系统嵌入到应用电子系统中的一种通用系统,这种系统既具有DSP器件在数据处理方面的优势,又具有应用目标所需要的技术特征,在许多嵌入式应用领域,既需要在数据处理方面具有独特的优势的DSP,也需要在智能控制方面技高一筹的微处理器(MCU);因此,将DSP与MCU融合在一起的双核平台,将成为DSP技术发展的一种新潮流。
德国Hyperstone公司是真正把DSP 成功嵌入32位微处理器的厂商之一,尤其是它的E1-XS系列更是这方面的佼佼者。
1 E1-16XS微处理器结构概述Hyperstone RISC/DSP架构框图如图1所示,Hyperstone内核是专为RISC和DSP功能的集成而设计的,但它不是两个不同内核在单个芯片上的简单组合,而是一个集成的内核和指令集。
这一全集成的内核基于单处理器模式,带有单指令流。
RISC和DSP单元间简单且高效的通信由1个96路的32位内部存储器实现,每个时钟周期内可以执行3条指令的操作,所以在100MHz的频率下可以达到300 MOPS这样优秀的性能。
Hyperstone E1-16XS是一款0.25μm CMOS工艺的微处理器,它结合了高性能的RISC微处理器和DSP处理器,利用简洁高效的指令,使嵌入式DSP处理器的实时性得以充分的发挥。
该处理器主要具有如下的特点:1、32位RISC/DSP处理器ALU、DSP单元和Load/Store单元并行处理,内部集成硬件乘法器。
2、16根数据线,22根地址线,4个外部存储体(Memory Bank)选择信号。
3、4GB内存地址空间,I/O空间和存储空间分开寻址,存储器和DSP连接无需附加逻辑电路。
4、片内集成16KB RAM和片上指令高速缓存。
5、具有全面的DRAM和DMA控制器,所有的总线时序可编程。
6、片上PLL、CPU总高频率可达到180MHz。
7、中断服务程序可在7个时钟周期内启动。
除内部中断外,还有7个外部中断可用。
8、3个可编程I/O引脚除了可配置成输入输出外,还可以配置成外部中断输入使用。
9、32位定时器和看门狗定时器,用户可利用hyRTK内核访问154个独立的"虚拟"定时器,仅需很少的处理开销。
2 嵌入式系统硬件设计2.1 系统硬件结构系统硬件结构如图2所示。
电源电路:输入5V,经过DC-DC变换,分别给微处理器提供2.5V和3.3V的电压。
晶振电路:16MHz有源晶体振荡器经过倍频,分别为Hyperstone内核/系统提供128/64MHz的时钟频率。
复位电路:可选用简单的RC复位电路,考虑到系统复位的可靠性和掉电监控,建议使用专门的复位IC,例如MAX706。
微处理器:即E1-16XS,是系统的工作和控制中心。
Flash:可存放Boot监控程序、嵌入式操作系统、用户应用程序或其他在系统掉电后需要保存的数据。
SDRAM:系统代码运行和数据变量存储的空间。
JTAG接口:通过该接口可对系统进行在线调试和程序下载。
I/O扩展接口:引出数据总线、地址总线和必需的I/O控制总线,便于用户根据自身的特定需求,扩展外围电路;DSP可以通过该扩展总线对其他板卡进行控制,或者其他板卡可以通过该接口对开发板进行操作。
2.2 系统主要硬件单元电路设计不同的DSP处理器在与DRAM、Flash连接时通常会有些差异,所以下面着重分析存储器接口电路的工作原理和设计方法。
(1)Flash接口电路由于Flash存储器具有低功耗、大容量,可整片或分扇区快速烧写、擦除、掉电后信息不丢失等特点,在各种嵌入式系统中得到广泛应用。
本系统中,Flash存储器采用Hynix的HY29LV160。
他是16位数据宽度,存储容量为16Mb(2MB),可以在2.7-3.6V电压范围内进行读、编程(烧写)和擦除操作。
在大多数系统中,选用1片16位的Flash存储器芯片(单片容量有1MB、2MB、4MB、8MB等)构建16位的Flash存储系统已经足够。
在此采用1片HY29LV160构建16位的Flash存储器系统,图3为16位模式Flash与处理器E1-16XS的基本接法。
Flash存储器在系统中通常用于存放程序代码,系统上电或复位后从此获取指令并开始执行。
因此,应将存有程序代码的Flash存储器配置到Bank3,即将E1-16XS的CS3接至HY29LV160的片选端CE。
输出使能端OE接E1-16XS的OE;写使能端WE接E1-16XS的WE1,模式选择BYTE上拉,使HY29LV160工作在16位数据模式。
RY/BY(就绪/忙)指示HY29LV160编程或擦除操作的工作状态。
HY29LV160地址总线A[19-0]与E1-16XS的地址总线A[20-1]相连;16位数据总线D[15-0]与E1-16XS的16位数据总线D[15-0相连,此时应将E1-16XS 的BOOTB置为0,即选择外部Flash为16位工作方式。
(2)DRAM接口电路与Flash存储器相比较,动态随机存储器DRAM虽然不具有掉电保持数据的特性,但其存取速度大大高于Flash存储器,在系统中主要用作程序的运行空间。
E1-16XS内部的DRAM控制器支持DRAM的各种形式,例如Fast-Page Mode、EDO 和SDRAM,都可以直接和处理器无缝连接。
存储器存取的总线时序刷新控制等可由总线控制寄存器(BCR)设定,这里以目前嵌入式系统设计中常用的SDRAM说明电路的具体连接。
系统中SDRAM选用IS42S16100-7T。
它的存储容量为2Banks×512K×16位(2MB),工作电压为(3.3±0.3)V,16位数据宽度,如果用户需要运行嵌入式操作系统以及各种相对较复杂的功能,可以考虑增加SDRAM的容量,E1-16XS最大支持128MB。
图4为IS42S16100-7T SDRAM存储器和E1-16XS的连接框图,将该SDRAM配置到系统存储器的Bank0,即将E1-16XS的DP0(SDRAM选择信号)接至IS42S16100的CS端,表1可以清晰地反应出E1-16XS和IS42S16100的连接情况。
(3)I/O扩展由于DSP本身的I/O口相对比较少,在很多应用场合下,需要进行I/O扩展,E1-16XS内部I/O总线控制寄存器提供了6位作为芯片选择用,有就是可以连接64个周边器件;另外还有3位作为I/O器件内部寄存器地址寻址用,9位用来设定读写访问的总线时序设置,例如地址建立时间和保持时间等,这样可以降低对外设的访问速度,适应低速外设的要求,一般对外设I/O的访问连接如图5所示。
图5中,IORD和IOWR为I/O访问时的读控制信号和写控制信号,分别连接到I/O 设计的读和写控制端;I/O设备的中断输出信号INT连接到DSP的中断输入信号INTn。
E1-16XS提供了最多7个外部中断输入可供连接。
3 PCB板设计要点设计好电路图后,就可以设计PCB板了,在系统中,E1-16XS的片内工作频率可以达到150MHz以上,系统总线频率也接近100MHz,因此,在PCB设计过程中,应该遵循高频电路设计的基本原则。
首先应注意电源的质量与分配,其次要注意信号线和时钟线的分布。
(1)电源质量与分配在设计PCB板时,给各个单元电路提供高质量的电源,会使系统的稳定性大幅度提高。
一般应在电源进入印刷电路板的位置和靠近各器件的电源引脚处加上几十~几百μf的电容,以滤除电源噪声,还要注意在器件的电源和地之间加上0.01μF-0.1μF左右的电容,用来滤除元器件工作时产生的高频噪声,由于双面PCB板电源采用电源总线的方式,受到电路板面积的限制,一般存在较大的直流电阻,所以为了提高系统的稳定性,通常采用多层板,一般专门拿出两层,作为电源层和地层,而不在其上布信号线。
低阻抗的电源层也可以像地层一样作为高频信号的返回通路,可以有效地降低噪声。
(2)同类型信号线的分布在设计PCB时,对于处理器的输入输出信号中的数据线、地址线等相同类型的线应该成组、平行分布、并保持它们之间的长短差异不要太大,采用这种方式布线的既可以减少干扰,增加系统的稳定性,还可以简化布线,使PCB板的外观美观。
(3)时钟信号线的分布较高频的时钟信号是电路板的关键信号,频率越高的时钟其布线要求也越高,布线时应使时钟源到负载的联线尽量短,线应尽量宽,不同时钟之间,时钟与其他信号之间避免平行走线。
信号负载较多时,在一个驱动器上不要驱动其他时钟信号,保持时钟信号的质量良好。
结语该精简开发板具有最小化的功能,用户仅仅需要在Flash里预先烧写Boot监控程序,就可以进行应用程序的调试和下载,该开发板具有良好的扩展性,通过I/O扩展接口为户的硬件扩展提供了很多的便利。
用户可以在不更改Boot监控程序的前提下对该精简开发板进行硬件功能(串口、USB、可编程器件等)的扩充。