伺服电机选型计算(自动计算版)
伺服电机选型计算xls 表格计算

TMx0.8>TL
* 此值因各系列而异,请加以注 意。
⑦加减速 转矩的计 算
加减速转矩TA
0.5096 0.037
⑧瞬时最 大转矩、 有效转矩 的计算
必要的瞬时最大转矩为T1
有效转矩Trms为
T1=TA+TL T2=TL T3=TL-TA
0.0523 0.0156 -0.0211
0.029
⑨讨论 负载惯量JL 有效转矩Trms
1.528 N.M
3000
r/mi n
条件满足 条件满足
条件满足 条件满足
条件满足
kg.m2 >
初步
选择
定
R88M
-
U200
30(J
m=
根据
R88M
-
1.6E-02
U200 30的
额定转矩Tm=源自N.m1.23E-05
0.637
(N.m )
N.m N.m N.m
N.m
≦[电机 的转子惯 量JM
﹤[电机 的额定转 矩
×
[适
1.23E-05
用的 惯量
比
=30]
0.5096 N.M
﹤[电机 的瞬时最 大转矩 ≦[电机 的额定转 数 U系列的 编码器规 格为2048 (脉冲/ 转),经 编码器分 频比设定 至1000 (脉冲/ 转)的情 况下使用 。
10 15 20
3 0.1
1
80 40 0.5 0.2 0.01
③换算到 电机轴负 载惯量的 计算
滚珠丝杠的惯量JB=
负载的惯量JW=
换算到电机轴负载惯量JL=JW
JL=G2x(JW+J2)+J1
④负载转 矩的计算
伺服电机详细计算选型
)+ )÷ 0.9
由α 2/3000 的速度 - 转矩特性可以看到, 力矩处于断续工作区的外面 据单)。 (故α 2/3000 的力矩是不够的。 )
9.81( Nm )的加速
(见上面的特性曲线和电机的数
如果轴的运行特性 (如, 加速时间) 不变, 就必须选择大电 机。比如,选择α 3/3000 ( Jm 为 0.02 kgf.cm.s ) ,重新计算 加速力矩如下: Ta = 123.7(Kg.cm) = 12.1(Nm) Vr = 2049(min ) 由该式可知, 加速时, 在转速 2049(min ) 时,要求加速力矩 为 12.1 Nm 。由上面的速度 - 力矩特性可以看出, 则法兰盘尺寸已经变为 用α 3/3000 3/3000 , 电机可满足加速要求 (条件 2) 。 由于已将电机换为α
条件 3: 频繁地定位和加 /减速会使电动机发热,此时需要计算出电动机承受的力矩的均方根值 Tc。 Trms ,使其小于电动机的额定力矩 条件 4: 负载波动频繁时,要计算一个工作周期的负载力矩的均方根值 的额定力矩。 条件 5: 电动机以最大切削力矩运行的时间应在允许的范围内(核算 条件 6:负载的惯量要小于电动机本身惯量的 本文譯自“α伺服电动机规格说明书( 择β i 电动机时也可作为参考。 Ton) 。 Tmrs ,使其小于电动机
α电机的选择
进给伺服电机的选择
(摘自 B-65262EN ) 王玉琪 电动机要承受 两种形式的力矩 :恒定的负载转矩和切削力矩(包括摩擦力矩) 力矩。下面介绍这两种力矩的计算方法及在选择电动机时应满足的条件。 ;加 /减速
条件 1: 机床无负载运行时,加在电动机上的力矩应小于电动机的连续额定力矩的 否则,在切削或加减 条件 2: 加( /减)速时间要短,须在电动机的允许范围内。 通常, 负载力矩帮助电动机的减速, 可在相同的时间内完成。 的机械特性的断续区内。 因此, 如果加速能在允许时间内完成的话, 减速也 这样我们只需计算加速力矩, 并在允许时间内核算该力矩在电动机 /速时电动机就可能过热。 50% 以下。
伺服电机配丝杆_选型计算(自动计算版)
伺服电机配丝杆_选型计算(自动计算版)1.确定运动参数:首先确定伺服电机的运动参数,包括运动的线速度、所需的动力和扭矩等。
这些参数将用于后续的计算。
2.计算负载参数:根据实际应用中的负载情况,计算负载的重量、摩擦系数和惯性矩等参数。
这些参数将用于后续的计算。
3.选择丝杆规格:根据伺服电机的运动参数和负载参数,选择合适的丝杆规格。
丝杆规格主要包括丝杆的直径、螺距和精度等参数。
选型时要考虑伺服电机的运动速度和负载扭矩对丝杆的影响,以确保丝杆能够满足运动要求并具有足够的强度和刚度。
4.计算传动参数:根据选择的丝杆规格,计算伺服电机系统的传动参数,包括传动比、传动效率和回程间隙等。
这些参数将用于后续的计算。
5.校核选型结果:对选择的丝杆规格和传动参数进行校核,确保其能够满足伺服电机系统的性能要求。
校核主要包括对丝杆的强度和刚度进行计算,以确保其在工作过程中不会发生断裂或过度变形,并能提供足够的精度和重复性。
6.优化选型结果:根据实际需求进行优化,比如考虑使用精密级别更高的丝杆、增加滚珠丝杆支撑方式或增加减速器等。
优化选型可以提高运动的精度和重复性,并减小伺服电机系统的噪声和振动。
在进行伺服电机配丝杆选型计算时,可以借助计算软件进行自动计算。
这种软件通常具有丰富的丝杆选型数据库,能够根据输入的运动参数和负载参数自动选择合适的丝杆规格,并计算相应的传动参数。
同时,软件还可以进行校核和优化,提供准确的选型结果。
需要注意的是,伺服电机配丝杆的选型计算是一个复杂的过程,需要考虑众多参数和因素。
因此,在进行选型计算时,建议用户充分了解伺服电机和丝杆的相关知识,同时参考相关的选型手册、技术资料和专业人员的建议,以确保选型结果的准确性和可靠性。
总之,伺服电机配丝杆的选型计算是一个重要的工作,对于伺服系统的性能和稳定运行具有重要影响。
通过借助计算软件和参考相关手册等工具,可以帮助用户快速准确地选择合适的丝杆参数,优化伺服系统的性能和使用效果。
富士伺服电机选型计算资料
富士伺服电机选型计算资料一、关于富士伺服电机的基本资料1. 输出功率(Pout):也就是电机实际输出的功率,通常用单位瓦特(W)表示。
2. 转速(N):电机输出的转速,通常用单位转每分钟(rpm)表示。
3.转矩(T):电机产生的转矩,通常用单位牛顿米(Nm)表示。
4.电压(V):电机工作时所需的电压,通常用单位伏特(V)表示。
5.电流(I):电机工作时所需的电流,通常用单位安培(A)表示。
二、富士伺服电机选型计算方法1.计算输出功率:输出功率(Pout)= 转矩(T)× 转速(N)/ 9550单位:W2.计算所需电流:所需电流(I)= 输出功率(Pout)/ 电压(V)单位:A3.确定电机型号:根据所需输出功率和所需电流,在富士伺服电机的型录中找到适合的型号。
4.考虑额定功率:在选型时,要考虑到电机的额定功率与所需输出功率的关系。
通常情况下,额定功率应大于所需输出功率,以保证电机能够正常工作。
5.考虑载荷惯性:在选型时,要考虑到负载的惯性对电机的影响。
如果负载的惯性较大,需要选择功率较大的电机来满足负载的加速度和减速度要求。
6.考虑工作环境:在选型时,还要考虑工作环境的特殊要求,如温度、湿度、振动等因素。
7.考虑控制系统:在选型时,还要考虑控制系统的要求,如控制精度、速度响应时间等因素。
三、富士伺服电机选型计算示例假设需要选型一台富士伺服电机,输出功率要求为2000W,工作电压为220V,负载惯性为0.03kg·m²,工作环境温度为25℃。
首先计算所需电流:所需电流(I)= 输出功率(Pout)/ 电压(V)所需电流(I)=2000W/220V≈9.09A接下来根据所需输出功率和所需电流,在富士伺服电机的型录中找到适合的型号。
假设找到了型号为MHN309D,额定功率为2200W,额定电流为10A。
然后考虑负载惯性,根据负载惯性为0.03kg·m²,选择合适的电机。
伺服电机选型计算实例

伺服电机选型计算实例伺服电机是一种控制器控制的电机,具有高精度和高速度的特点,广泛应用于机械设备中。
在选型伺服电机时,需要考虑多个参数来满足具体的应用要求。
下面以一个选型计算实例来详细介绍伺服电机的选型过程。
假设我们需要选型一台伺服电机用于驱动一个线传动机构,具体要求如下:1.最大负载力为2000N,工作速度范围为0-10m/s。
2. 线传动机构的负载惯量为500kg·m²。
3. 需要保证驱动精度在±0.2mm范围内。
4.工作环境温度范围为0-40℃。
首先,我们需要计算所需的转矩。
根据公式:转矩=负载力×工作半径,其中工作半径等于线传动机构的负载惯量÷2、由于我们没有具体的线传动机构参数,假设负载惯量为500kg·m²,即工作半径为0.25m。
则最大转矩=2000N×0.25m=500N·m。
考虑到一般情况下,峰值转矩为最大转矩的2倍,即1000N·m。
接下来,我们需要计算伺服电机的速度要求。
根据给定的工作速度范围0-10m/s,我们可以选择合适的额定转速。
假设我们选择的额定转速为2000rpm,则转速范围为0-2000rpm。
考虑到加速度和减速度的要求,一般额定转速的选择会略高于平均线速度,假设为2200rpm。
接下来,我们需要选择合适的伺服电机型号。
在选型之前,我们还需要考虑工作环境的温度范围。
根据给定的工作环境温度范围为0-40℃,我们需要选择具备合适温度范围的伺服电机。
一般伺服电机的温度范围为0-50℃,因此我们可以选择标准型号的伺服电机。
在选择伺服电机型号时,我们需要参考厂家提供的电机性能参数。
主要包括额定转矩、额定转速、额定电压、额定电流、额定功率等。
根据我们的要求,我们可以对比不同型号的伺服电机并选择合适的型号。
最后,我们需要根据具体应用需求考虑伺服电机的控制方式、接口类型以及其他附件等。
伺服电机及丝杠选型计算(自动表格计算)
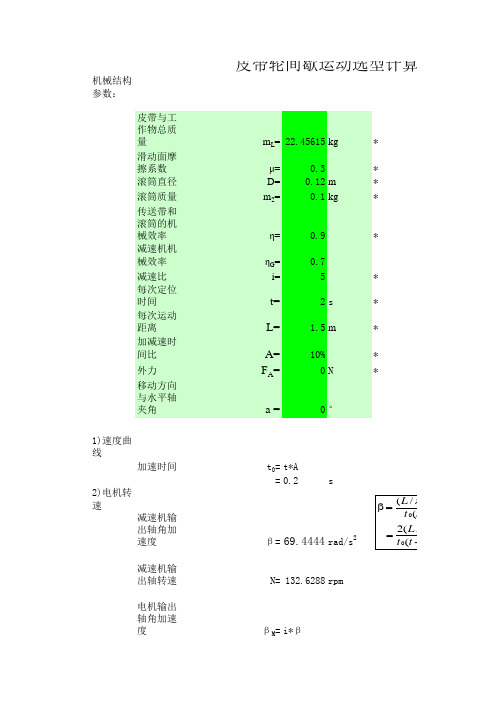
机械结构参数:皮带与工作物总质量m L =22.45615kg *滑动面摩擦系数μ=0.3*滚筒直径D=0.12m *滚筒质量m 2=0.1kg*传送带和滚筒的机械效率η=0.9*减速机机械效率ηG =0.7减速比i=5*每次定位时间t=2s *每次运动距离L= 1.5m *加减速时间比A=10%*外力F A =0N*移动方向与水平轴夹角a =0°1)速度曲线加速时间t 0=t*A=0.2s2)电机转速减速机输出轴角加速度β=69.4444rad/s 2减速机输出轴转速N=132.6288rpm电机输出轴角加速度βM =i*β皮带轮间歇运动选型计算表=347.2222rad/s 2电机输出轴转速N M =N*i=663.144rpm3)计算负载转矩减速机轴向负载F==66.02108N减速机轴负载转矩T L= 4.401405Nm电机轴负载转矩T LM == 1.257544Nm4)计算电机轴加速转矩(克服惯量)皮带和工作物的惯量J M1=0.080842kgm 2滚筒的惯量J M2==0.00018kgm 2J M1+2J M2=0.081202kgm 2折算到减速机轴的负载惯量J L =2F D η22()2()2L L D D ππ2218m D Gi ηJ全负载惯量J==0.003648kgm 2电机轴加速转矩T S= 1.809566Nm5)必须转矩必须转矩T M =(T LM +T S )*S= 6.134221Nm6)负荷与电机惯量比惯量比N1==8.120214M J βg=9.8m/s 22.45615克pi=3.1416计算表格电机惯量J M=0.0004kgm2安全系数S=2。
伺服电机的选型计算办法
伺服电机的选型计算办法一、确定负载惯量:负载惯量是指伺服电机需要驱动的负载系统的惯性矩阵。
负载的形状、质量、分布和转动部件的位置等都会影响到负载的惯性矩阵。
1.如果负载是刚体,惯性矩阵可以通过测量负载的质量和尺寸,并进行计算得到。
2.如果负载是连续变形的物体,可以通过将其分为多个刚体部分,分别计算惯性矩阵,再进行合成得到整个负载的惯性矩阵。
二、计算定格转矩和定格转速:1.根据应用的工作周期,计算出所需的平均定格转矩。
定格转矩是指电机在长时间运行情况下,能够稳定输出的转矩。
2.根据应用的工作周期和速度要求,计算出所需的平均定格转速。
定格转速是指电机能够稳定运行的最大转速。
三、选择电机型号:1.根据定格转矩和定格转速的要求,查找电机制造商提供的电机规格表,找到满足要求的电机型号。
2.选择电机型号时还需要考虑其他因素,如电机的功率、最大转矩、过载能力、加速度能力等。
根据具体应用的需求进行综合考虑,选取合适的电机型号。
四、校核选型:1.根据选择的电机型号,计算电机的部分负载转矩和转矩脉冲响应时间。
与应用要求进行比较,确保选型的合理性。
2.根据负载惯量和转矩要求,计算伺服电机的加速时间。
与应用的加速要求进行比较,确保选型的合理性。
3.根据电机的定格转矩和转速,计算电机的输出功率。
与应用的功率需求进行比较,确保选型的合理性。
五、其他因素考虑:除了上述的基本选型计算办法外,还需考虑其他因素,例如电机的可靠性、寿命、环境适应性、维护和保养成本等。
总结:伺服电机的选型计算是一个综合考虑电机的转矩、转速、功率和其他性能指标的过程。
根据负载的惯性矩阵、应用的工作周期和速度要求,选择合适的电机型号,并进行校核以确保选型的合理性。
同时,还需要考虑其他因素,如电机的可靠性、寿命和维护成本等。
以上是伺服电机选型计算的一般步骤,具体要根据具体的应用需求来选择,需要结合实际情况进行综合决策。
伺服电机选型和编码器选型计算
伺服电机选型和编码器选型计算1. 引言在设计和选择伺服控制系统时,正确选型电机和编码器是非常重要的。
本文将介绍如何进行伺服电机和编码器的选型计算,帮助您选择适合您应用需求的电机和编码器。
2. 伺服电机选型计算伺服电机的选型计算主要涉及以下几个参数:- 功率需求(单位:瓦特)- 转矩需求(单位:牛米)- 转速需求(单位:转/分钟)根据应用需求,可以通过以下步骤计算伺服电机的选型:1. 确定所需的功率需求。
2. 确定所需的转矩需求。
3. 确定所需的转速需求。
4. 根据伺服电机的技术参数表,选择一个合适的电机型号,其中包括功率、转矩和转速等参数。
3. 编码器选型计算编码器是用于测量和反馈电机转速和位置信息的重要设备。
选取合适的编码器需要考虑以下因素:- 分辨率需求(单位:线数)- 测量精度需求选型计算步骤如下:1. 确定所需的分辨率需求,即每转的线数。
2. 考虑测量精度需求,通常以角度或长度表示。
3. 根据编码器的技术参数表,选择一个合适的编码器型号,其中包括分辨率和测量精度等参数。
4. 总结正确选型伺服电机和编码器对于设计和选择伺服控制系统至关重要。
通过本文介绍的伺服电机和编码器选型计算方法,您可以根据应用需求选择适合的电机和编码器型号,以满足系统的性能和稳定性要求。
在选择过程中,还需注意其他因素,如供电要求、安装尺寸和可靠性等,以获取最佳的控制效果。
请注意,本文只提供了伺服电机和编码器选型计算的基本步骤和考虑因素,具体选型还需根据实际应用需求进行详细分析和评估。
伺服电机配丝杆选型(自动计算)
T1=TA+TL T2=TL T3=TL-TA
2.0662 N.m 0.3901 N.m -1.2860 N.m
1.101 N.m
⑨讨论 负载惯量JL 有效转矩Trms
1.04E-03 kg.m2 1.101 N.m
≦[电机 的转子惯 量JM
﹤[电机 的额定转 矩
瞬时最大转矩T1 必要的最大转数N
④负载转 矩的计算
对摩擦力的转矩Tw
3.90E-01 N.m
换算到电机轴负载转矩TL=Tw
⑤旋转数 的计算
转数N
⑥电机的 初步选定 [选自 OMNUC U 系列的初 步选定举 例]
N=60V/P.G
选定电机的转子·惯量为负载的 1/30*以上的电机
JM≥JL/30
3.90E-01 N.m 1500 r/min
①机械系 统的决定
负载质量M(kg) ·滚珠丝杠节距P(mm) ·滚珠丝杠直径D(mm) ·滚珠丝杠质量MB(kg) ·滚珠丝杠摩擦系数μ ·因无减速器,所以G=1、η=1
②动作模 式的决定
单一变化 ·负载移动速度V(mm/s) ·行程L(mm) ·行程时间tS(s) ·加减速时间tA(s) ·定位精度AP(mm)
编码器分辨率R=P.G/AP.S
2.0662 N.m 1500 r/min
1000 (脉冲/转)
﹤[电机 的瞬时最 大转矩 ≦[电机 的额定转 数 U系列的 编码器规 格为2048 (脉冲/ 转),经 编码器分 频比设定 至1000 (脉冲/ 转)的情 况下使用 。
300
0
0.2
1
0.2 0.2
时间 (s)
初步
选择
定
R88M
-
伺服电机选型计算
3.13E-04 kg.m2
8.90E-06 kg.m2
1.57E-03 kg.m2
6.13E-01 N.m
4.69E-01 N.m
1.08E+00 N.m
1200 r/min <
3000 合格
N
1.77E-05 kg.m2 < 0.32 N.m <
虑以下计算,方能确定电机转矩
0.00 r/min <
0
N.m >
0 N.m
加减速时间为0,无加减速扭矩 N.m >
1.05E-04 不合格 JM= 1.08E+00 不合格 Tm=
5000 合格
N
1.92E+00 不合格
6.40E-01 不合格 Tm=
(脉冲/转)
U系列 的编 码器 规格 为 2048 (脉 冲/ 转) ,经 编码 器分 频比 设定 至675 (脉 冲/ 转) 的情 况下 使用 。
3000 r/min 查电机样本
1.77E-05 kg.m2 查电机样本 初步选定台达200W/220V/60MM
0.64 N.m 查电机样本
5.00E+03 r/min 查电机样本 1.92 N.m 查电机样本
电机最大转速 电机最大转矩
0.64 N.m 查电机样本
电机额定转矩
条件满足
T
Tr
TO =
Ta2ta Tr2tr T2t ta tr t ts
TO
0.2
编码器分辨率R=P.G/AP.S
675
G为减速比,AP 定位精度
2 kg 50 mm 0.50 kg 0.8 15.0 N
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
①机械系统的决定
负载质量M(kg)100
·滚珠丝杠节距P(mm)10
·滚珠丝杠直径D(mm)40
·滚珠丝杠质量MB(kg)3
·滚珠丝杠摩擦系数μ0.1
·因无减速器,所以G=1、η=11
②动作模式的决定
速度(mm/s)单一变化##
·负载移动速度V(mm/s)500
·行程L(mm)360
·行程时间tS(s) 1.4
·加减速时间tA(s)0.20
·定位精度AP(mm)0.01
滚珠丝杠的惯量JB=0.0006kg.m2
负载的惯量JW=0.00085kg.m2
换算到电机轴负载惯量JL J
L =G2x(J W+J 2)+J1
0.00085kg.m2
④负载转矩的计算
对摩擦力的转矩Tw0.15605N.m
换算到电机轴负载转矩TL=Tw0.15605N.m
转数N N=60V/P.G3000r/min
⑥电机的初步选定[选自OMNUC U系列的初步选定举例]
选定电机的转子·惯
量为负载的1/30*以上
的电机
JM≥J L/30 2.8E-05kg.m2
选定电机的额定转矩
×0.8
比换算到电机轴负载
转矩
大的电机N.m
TMx0.8>T L0.5096>
* 此值因各系列而异,请加以注意。
⑦加减速转矩的计算
加减速转矩TA 1.3594N.m
0.156
⑧瞬时最大转矩、有效转矩的计算
必要的瞬时最大转矩为T1T1=TA+TL 1.51545N.m
T2=TL0.15605N.m
T3=TL-TA-1.2033N.m 有效转矩Trms为
0.81528N.m
度(mm/s)
0100时间(s)
初步选择定R88M-U20030(根据R88M-U20030的额定转(N.m)
0.1561E-050.637
机的转子惯量1E-05×[适用的惯量比=30]
机的额定转矩0.5096N.M
机的瞬时最大1.528N.M
机的额定转数3000r/min
系列的编码器规格为2048(脉冲/转),经编码器分频比设定至1000(脉冲/转)的
00(脉冲/转)的情况下使用。