倒车雷达测试项目及标准
倒车雷达测试及评价试验规范

Q/SQR 奇瑞汽车股份有限公司企业标准Q/SQR . x x. x x x - 2008倒车雷达性能台架测试及评价试验规范奇瑞汽车股份有限公司前言本规范主要规定了奇瑞汽车股份有限公司系列车倒车雷达系统性能测试方法、试验条件。
本规范的编写与表述按奇瑞汽车股份有限公司企业标准Q/《倒车辅助系统技术要求》及ISO 17386-2003进行。
本规范是在满足奇瑞汽车产品性能要求的前提下制定的。
本标准作为公司开发新产品和抽检配套供应商供货质量的依据。
本规范由奇瑞汽车股份有限公司试验技术中心提出。
本规范由奇瑞汽车股份有限公司汽车工程研究院归口本规范起草单位:奇瑞汽车股份有限公司试验技术中心本规范首次发布日期是2008年XX月XX日。
本规范主要起草人:李川、郑春平、周琴倒车雷达性能台架测试及评价试验规范1 范围本规范适用于奇瑞汽车有限公司生产的系列车型所用倒车雷达系统台架性能测试及评价。
2 规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
Q/ 倒车辅助系统技术要求ISO 17386-2003 Intelligent Transportation Systems.Manoeuvring Aids for Low Speed Operation.Performance requirements and test procedures3 试验条件试验环境条件环境温度:23℃±5℃相对温度:25~75%气压:86~106kPa试验电压:13±4 性能要求探测区域分类根据Q/及ISO 17386-2003要求,把倒车雷达探测距离分为5段,见图1:OA(0~20cm]:由倒车雷达探头换能器工作原理决定,该区域为不定状态区域,因此在测试过程中可以不进行测试;OS(0~35cm):为急停区域,当障碍物出现在在区域内时,必须停车,且声音报警声长鸣;SB[35~60cm]:为急停区域,当障碍物出现在在区域内时,必须停车,且声音报警声急促4Hz;BC(60~90cm]:为缓行区,在该区域内,车辆应该减慢车速,保证车速在5km/h内(在实际行驶过程中),且声音报警声频率2Hz;CD(90~150cm]:为预警区,表示障碍物已经进入车辆倒车辅助系统进行提示作用,保证车速在5km/h内(在实际行驶过程中),且声音报警声频率1Hz。
RSOE9倒车雷达企业标准DOC
Q/RS倒车雷达东荣电子(广州)有限公司发布目次前言 (II)1 范围 (1)2 规范性引用文件 (1)3 术语和定义 (1)4 测试条件 (2)5 技术要求 (2)6 试验方法 (3)7 环境实验要求 (4)8 检验规则 (4)9 标志、标签和包装 (7)前言本标准是参考QC/T 413-2002 《汽车电气设备基本技术条件》、GB/T 17619-1998《机动车电子电器组件的电磁辐射抗扰性限值和测量方法》和GB 18655-2002 《用于保护车载接收机的无线电骚扰特性的限值和测量方法》进行编写的。
本标准由东荣电子(广州)有限公司企业标准品质部归口。
本标准起草单位:东荣电子(广州)有限公司企业标准工程部。
本标准主要起草人:本标准于2007年5月首次发布。
倒车雷达1 范围本标准规定了本公司生产的倒车雷达的要求、试验方法、检验规则、标志、标签和包装。
本标准适用于本公司生产的倒车雷达。
2 规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
QC/T 413-2002 汽车电气设备基本技术条件GB2828—1987逐批检查计数抽样程序及抽样表(适用于连续批的检查)GB18052—1987周期检查计数抽样程序及抽样表(适用于生产过程稳定性的检查)GB/T 17619-1998《机动车电子电器组件的电磁辐射抗扰性限值和测量方法》GB 18655-2002《用于保护车载接收机的无线电骚扰特性的限值和测量方法》3 术语和定义3.1 倒车雷达系统通常由倒车雷达主机和雷达探头、蜂鸣器、显示器组成。
通过发射/接收超声波信号,探测汽车后方障碍物距离,用声音提示和显示测量的距离,达到协助驾驶员安全倒车的作用。
中型车倒车雷达测试
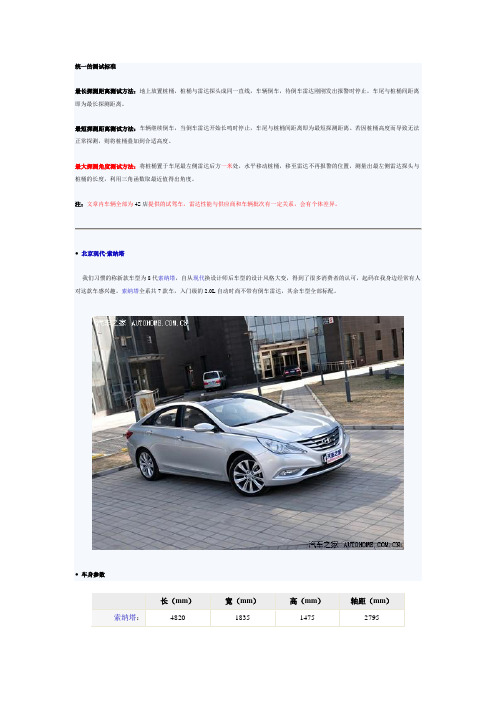
长(mm)宽(mm)高(mm)轴距(mm)索纳塔:4820 1835 1475 2795索纳塔后4探头雷达,雷达探头距离地面高度为59cm。
测试中索纳塔只能探测到高度为45cm的大号桩桶,对于30cm小桩桶的探测能力基本为零。
所以倒车中需要特别注意高度矮的障碍物,以免发生碰撞。
虽然探头高度不低,但是在测试最小距离时并不需要将桩桶叠加,可以轻松探测到大桩桶。
雷达长鸣时车尾与桩桶的距离为25cm,距离比较合适。
我们将桩桶放在距车尾一米处,逐渐向外移动,最后测得雷达侧向探测角度为23°,角度并不算很大。
长(mm)宽(mm)高(mm)轴距(mm)雪铁龙:4805 1860 1458 2815像世嘉一样,雷达位置位于后包围底部,离地高度为43cm。
C5雷达最大探测距离为137cm,距离较长,由于雷达位置较低,所以可以轻松探测到小桩桶,在实际的驾车中对于驾驶员帮助较大。
虽然雷达高度并不高,但是随着车辆的后退,对于小桩桶探测的盲区出现了,在44cm处雷达声音戛然而止,也就是说此时如果继续倒车必定撞倒小桩桶,所以雷达高度只是相对的,倒车仍需谨慎。
由于近距离情况下探测不到小桩桶,所以我们更换了大桩桶,最后当雷达长鸣时车尾与桩桶的距离为30cm,距离偏长,长鸣后仍有不少余量。
在桩桶距离车辆一米处,C5雷达探测角度为28度,角度比较大,倒车是可以更好的发现侧面的障碍物。
C5中控台带有模拟显示,可以显示出后方障碍物与车尾的距离,不过有一点需要注意的是C5的雷达过渡有些突然,频率渐变的不是很明显,会由渐变突然转为长鸣,过渡的急促感不明显。
一汽马自达-睿翼中型车有很大一部分都走运动路线,睿翼就是其中之一。
受到很多原因的影响睿翼的销量远不如马自达6,但是时尚运动的外观和比较丰富的配置依然对于年轻人有着很强的吸引力。
睿翼除一款手动挡车型外全部带有倒车雷达。
● 车身参数睿翼后雷达离地高度为60cm,相比之下距离偏高。
后雷达探测的最远距离为150cm,距离不近,比较合理。
倒车雷达

倒车雷达全称叫“倒车防撞雷达”,也叫“泊车辅助装置”,是汽车泊车或者倒车时的安全辅助装置,由超声波传感器(俗称探头)、控制器和显示器(或蜂鸣器)等部分组成。
能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高驾驶的安全性。
倒车雷达又称泊车辅助系统,或称倒车电脑警示系统。
英文名称:Parking Distance Control英文简称:PDC国内品牌:雷兽、铁将军、亿车安、四创、蓝霹雳、安极星、豪迪、探路神、路标、固地、宝仕达、Linfor、二朗神、世博、德首、国邦、黑鹰、奇真等。
探测原理倒车雷达是根据蝙蝠在黑夜里高速飞行而不会与任何障碍物相撞的原理设计开发的。
探头装在后保险杠上,根据不同价格和品牌,探头有二、三、四、六、八只不等,分别管前后左右。
探头以45度角辐射,上下左右搜寻目标。
它最大的好处是能探索到那些低于保险杠而司机从后窗难以看见的障碍物,并报警,如花坛、蹲在车后玩耍的小孩等。
倒车雷达的显示器装在后视镜上,它不停地提醒司机车距后面物体还有多少距离,到危险距离时,蜂鸣器就开始鸣叫,让司机停车。
挡位杆挂入倒挡时,倒车雷达自动开始工作,测距范围达0.3到2.0米左右,故在停车时,对司机很实用。
倒车雷达就相当于超声波探头,从整体上来说超声波探头可以分为两大类:一是用电气方式产生超声波,其二是用机械方式产生超声波,鉴于目前较为常用的是压电式超声波发生器,它有两个电晶片和一个共振板,当两极外加脉冲信号,它的频率等于压电晶片的固有震荡频率时,压力晶片将会发生共振,并带动共振板振动,将机械的能转为电信号的这一过程,这就成了超声波探头的工作原理。
为了更好地研究超声波和利用起来,人们已经设计和制造出很多超声波发声器,超声波探头加以运用在使用汽车倒车雷达上。
这种原理用在一种非接触检测技术上,用于测距来说其计算简单,方便迅速,易于做到实时控制,距离准确度达到工业实用的要求。
倒车雷达[总结]
![倒车雷达[总结]](https://img.taocdn.com/s3/m/e410bbeaf605cc1755270722192e453610665b87.png)
保障汽车驾驶时的自动性、舒适性和安全性是智能汽车一直追求的目标。
为保障驾车安全,发展汽车防撞技术十分关键。
世界各国对汽车防撞技术的研究和发展投入了大量的人力、物力和财力。
而这一技术的关键却是车辆测距技术。
汽车必须凭借一定的装备测量前方障碍物的距离,并迅速反馈给汽车,以在危急的情况下,通过报警或自动进行某项预设定操作如紧急制动等,来避免由于驾驶员疲劳、疏忽、误判断所造成的交通事故。
据统计,危险境况时,如果能给驾驶员半秒钟的预处理时间,则可分别减少追尾事故的30%,路面相关事故的50%,迎面撞车事故的 60%。
与此同时,在智能汽车中,测距并反馈路况信息是汽车的自动化行驶的关键。
由此可见,测距技术对保障行车安全,提高汽车智能化水平有重要意义。
现在运用在汽车上的测距方法主要有超声波短距离测距,毫米波雷达长距离测距,摄像系统测距,激光测距,夜间应用的红外线测距等几种方法。
—、超声波距离测距超声波一般指频率在20KHE以上的机械波,具有穿透性较强、衰减小、反射能力强等特点,超声波测距仪器一般由发射器、接收器和信号处理装置三部分组成。
工作时,超声波发射器不断发出一系列连续的脉冲,并给测量逻辑电路提供一个短脉冲。
超声波接收器则在接收到遇障碍物反射回来的反射波后,也向测量逻辑电路提供一个短脉冲。
最后由信号处理装置对接收的信号依据时间差进行处理,自动计算出车与障碍物之间的距离。
超声波测距原理简单,成本低、制作方便,但其在高速行驶的汽车上的应用有一定局限性,这是因为超声波的传输速度受天气影响较大,不同的天气条件下传播速度不一样;另一方面是对于远距离的障碍物,由于反射波过于微弱,使得灵敏度下降。
故超声波测距一般应用在短距离测距,最佳距离为4—5米,一般应用在汽车倒车防撞系统上。
二、性能稳定的毫米波雷达长距离测距雷达是利用目标对电磁波反射来发现目标并测定其位置的。
汽车上应用的雷达采用的是30GHZ以上的毫米波雷达。
毫米波频率高、波长短,一方面可缩小从天线辐射的电磁波射束角幅度,从而减少由于不需要的反射所引起的误动作和干扰,另一方面由于多普勒频移大,相对速度的测量精度高。
超声波倒车雷达课程设计
超声波倒车雷达课程设计一、课程目标知识目标:1. 让学生了解超声波倒车雷达的基本原理,掌握其工作流程及组成部分。
2. 使学生理解超声波在介质中的传播特性,掌握超声波的反射、折射、衰减等基本概念。
3. 帮助学生掌握超声波倒车雷达的安装、调试及使用方法。
技能目标:1. 培养学生运用所学知识解决实际问题的能力,能够独立完成超声波倒车雷达的安装与调试。
2. 提高学生的动手实践能力,学会使用相关工具和仪器进行超声波倒车雷达的检测和维护。
3. 培养学生的团队协作能力,能够与他人共同完成超声波倒车雷达的安装与调试任务。
情感态度价值观目标:1. 培养学生热爱科学、勇于探索的精神,激发对物理学科的兴趣和热情。
2. 增强学生的安全意识,认识到安全驾驶的重要性,养成文明驾驶的良好习惯。
3. 培养学生的环保意识,了解超声波倒车雷达在降低交通事故、保护环境方面的积极作用。
本课程针对初中年级学生设计,课程性质为理论联系实践的应用型课程。
学生在学习过程中需具备一定的物理知识和动手能力。
教学要求注重理论与实践相结合,以学生为主体,充分调动学生的积极性、主动性和创造性。
通过本课程的学习,使学生能够将所学知识应用于实际生活,提高解决实际问题的能力。
同时,培养学生在团队合作中发挥个人特长,养成良好的学习态度和价值观。
二、教学内容1. 理论知识:- 超声波基本概念:超声波的定义、产生、传播特性等。
- 超声波倒车雷达原理:超声波发射、接收、距离计算等。
- 安全驾驶知识:倒车注意事项、安全距离判断等。
2. 实践操作:- 超声波倒车雷达的安装与调试:安装位置选择、调试方法等。
- 超声波倒车雷达的使用:操作步骤、注意事项等。
- 故障排查与维护:常见故障分析、维护方法等。
3. 教学大纲:- 第一课时:超声波基本概念、安全驾驶知识。
- 第二课时:超声波倒车雷达原理、实践操作(安装与调试)。
- 第三课时:超声波倒车雷达的使用、故障排查与维护。
4. 教材章节:- 第四章:超声波及其应用。
倒车雷达探测范围测量方法及准确度分析

倒车雷达探测范围测量方法及准确度分析作者:崔晓川邹博维孙明来源:《中国测试》2016年第05期摘要:提出一种测量倒车雷达探测范围的方法,利用激光器、激光测距仪及三坐标测量机结合超声波雷达的原理,通过光滑拟合雷达最远探测点的方式,可视化显示倒车雷达探测范围,经过试验验证该方法的测量准确度为2%,最后利用该方法确定倒车雷达在视野盲区内为不同障碍物提供的有效探测范围。
该文通过将整车上的倒车雷达复制到台架上的方式测量倒车雷达的探测范围,为国内尚不明确的倒车雷达测量范围测试标准提供参考。
关键词:视野盲区;倒车雷达探测范围;可视化探测区域;超声波雷达文献标志码:A 文章编号:1674-5124(2016)05-0042-04Abstract: This paper has proposed a method to measure the detection range of reversing radar by using a laser, a laser distance meter and a coordinate measurement machine. Specifically, fit the farthest position that radar can detect smoothly with the operating principle of ultrasonic radar to visualize the detection range of reversing radar. The measurement accuracy was verified to be 2%. The last step was determining the effective detection scope provided by the reversing radar in blind spot vision to different obstacles. Particularly, the radar system installed on vehicle was reverted to a test bench to measure the detection range. The method offers a reference for domestic standards that are still indefinite for the measurement range of reversing radar.Keywords: blind spot vision; reversing radar detection range; visual detection area;ultrasonic radar0 引言随着汽车行业的飞速发展,人们对汽车的需求不再局限于简单的代步功能,汽车安全问题得到越来越多的重视。
倒车雷达系统课程设计

倒车雷达系统课程设计一、课程目标知识目标:1. 理解倒车雷达系统的基本组成、工作原理及其在汽车安全系统中的重要性。
2. 掌握倒车雷达系统中超声波传感器、信号处理单元和显示器的功能及相互关系。
3. 掌握倒车雷达系统的安装、调试及维护的基本知识。
技能目标:1. 能够运用所学的理论知识,分析倒车雷达系统在实际应用中的优缺点。
2. 能够通过小组合作,设计简单的倒车雷达系统模拟装置,并进行调试。
3. 能够运用倒车雷达系统相关知识,解决实际生活中的问题。
情感态度价值观目标:1. 培养学生对汽车安全技术的兴趣,激发他们学习科学技术的热情。
2. 增强学生的团队合作意识,培养他们在合作中解决问题的能力。
3. 提高学生的安全意识,使他们认识到倒车雷达系统在保障行车安全中的重要作用。
本课程针对高年级学生,结合学科特点,注重理论知识与实践操作相结合。
课程设计充分考虑学生的认知水平和兴趣,旨在提高学生的动手能力、创新意识和安全意识。
通过本课程的学习,学生能够掌握倒车雷达系统的基本知识,形成解决实际问题的能力,并在情感态度上得到积极引导。
二、教学内容1. 倒车雷达系统概述:介绍倒车雷达系统的发展历程、应用领域及其在汽车安全系统中的地位。
- 教材章节:第一章 汽车安全技术概述- 内容列举:倒车雷达系统的起源、发展、种类及功能。
2. 倒车雷达系统组成与原理:详细讲解超声波传感器、信号处理单元、显示器等组成部分及其工作原理。
- 教材章节:第二章 汽车倒车雷达系统- 内容列举:超声波传感器原理、信号处理方法、距离计算与显示。
3. 倒车雷达系统的安装与调试:介绍倒车雷达系统的安装位置、步骤及调试方法。
- 教材章节:第三章 倒车雷达系统的安装与调试- 内容列举:安装位置选择、步骤分解、调试技巧。
4. 倒车雷达系统的维护与故障排除:讲解倒车雷达系统的日常维护、常见故障及排除方法。
- 教材章节:第四章 倒车雷达系统的维护与故障排除- 内容列举:日常维护注意事项、常见故障现象及原因、排除方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字信号发生器
在电压差(高或者低)为1V以内 时,2个设备可以正常通信
1MIN
研发阶段
测试2个设备之间地电压偏移时, 是否可以正常工作
数字信号发生器
测试单个探头的角度
把传感器固定在测试台上,地面铺测试方格布;用一根直径 75mm,高1.2米的PVC管在布上移动,确定探头的角度。
在电压差(高或者低)为1V以内 时,2个设备可以正常通信
1MIN
研发阶段
水平角度 120度,垂直角度60度 1H 每批
测试固定在保险杠上的探头探测范 围
把传感器固定在保险杠上(每个探头之间间距40cm),地面铺测 试方格布;用一根直径75mm,高1.2米的PVC管在布上移动,确定 探头的角度。
可以探测到后方2.0米*1.1米的矩 形区域
2H
每批
测试单个探头的最小探测距离
T1=1ms T2=400ms
3个周期
3个周期无异常
10s
模拟电源缓慢增加(降低)时,对 通电测试 缓慢地把电压从最高调到最低(0V),再缓慢地从最
产品造成的影响
低调到最高
3个周期无异常
1H
模拟电源缓慢减少、快速增加时, 通电测试 缓慢地把电压从最高调到最低(0V),再快速地从最
对产品造成的影响
低调到最高
44±0.5cm宽度范围值内。
产品数据图像显示稳定,各参数 符合产品规定之标准
4H
研发阶段 研发阶段 研发阶段 研发阶段
34
(防潮)防水和 绝缘试验
测试产品的防潮性能
将产品置于潮湿试验箱内,调节箱内环境为25℃±2℃ 91%-95% 相对湿度,保持48小时后取出,立即用吸水纸吸去样件上可见水 珠,即时在安定器外壳上施加为时1分钟500V直流电压后测定绝 缘电阻。
3个周期无异常
1H
测试产品重启动性能
通电开关测试,重新启动测试;每次开机5S,再关机5S;重复100 显示及声响稳定精确,无数据跳
次
跃不定,灵敏度变值的异况.
1H
测试产品瞬间断电时的性能
电源瞬间中断100us,再正常供电5S;重复10次
显示及声响稳定精确,无数据跳 跃不定,灵敏度变值的异况.
50S
测试1:每个引脚中断10S,缓慢间隔
电铃干 扰
测试产品在复杂声源环境下的抗干 将倒车雷达的传感器模拟实际使用安装夹具里,电铃距离传感器
扰能力
上方垂直10厘米通电工作1分钟。
跃不定,灵敏度变值的异况.注: 液晶显示器.应无干扰条纹及死屏 1H 现像出现.摄像头摄像效果应无变
差现像
显示及声响稳定精确,无数据跳
32
磁场干 扰
测试产品在复杂磁场环境下的抗干 将倒车雷达的传感器模拟实际使用安装夹具里,吹风筒距离传感
模拟引脚断开,或者接触不稳定时 测试2:每个引脚中断1mS,快速间隔,允许电流传递,保持中断
的工作性能。
电压和间隔100μS
以上3个测试中,产品和测试设备 无异常
60S
测试3:接触不稳定.
研发阶段 研发阶段 研发阶段 研发阶段 每批 研发阶段
每批
测试连接器的可靠性
通电测试,对连接器进行插拨试验,每次间隔2S
序 号
类 别
测试项目
1 外观测试
2
额定电压
3
额定电流
4
工作电压范围 9-18V
5
长时间过载电压 测试
6 瞬态过载
7 跳跃启动
8
电压缓慢减少和 增加试验
9
电压缓慢减少, 快速增加试验
10 重启动作试验
11 瞬时中断
12 引脚中断试验
电
气
13
性 能
连接器中断
试
14 验 反向电压试验
15 短路试验
产品测试项目及标准
8H
每批
检验产品高温环境下,连续工作时 产品在70℃条件下,应能持续工作96h,试验后应满足功能状态A 显示及声响稳定精确,无数据跳
的可靠性和稳定性
的规定
跃不定,灵敏度变值的异况.
96H
1次/1年
检验产品低温环境下,连续工作时 产品在-30℃搁置2h后,再开始通电开机,应能在-30℃环境下持 显示及声响稳定精确,无数据跳
2、经过2h温度降低到25℃,并保持0.5h; 3、经过2h温度上升到65℃,并保持3.5h; 4、经过2h温度降低到25℃,并保持时间t;
显示及声响稳定精确,无数据跳 跃不定,灵敏度变值的异况.
5、经过0.5h温度降低到-10℃,并保持3h;
6、经过1.5h温度上升到25℃,并保持1.5h;
湿度93±3%RH,每个循环24h,共8个循环,前5个循环按1~6步骤
17
反馈电压试验
18 电源开/断试验
19
升温试验
20
稳定时间
21
视频输出电压 (白色电平)
电源偏移试验
22
(仅针对数字信
号)
23
地偏移试验(仅 针对数字信号)
24
超声波传感器探 测角度
25 雷达探测范围
26 最小探测距离 27 最大探测距离 28 灵敏度范围 29 报警音量
测试产品的待机电流 测试产品的反馈电压
测试内容(目的)
测试方法和设备
测试结果(标准值)
测试时 间
测试周期
参考公司外观检验标准
2H 每批
测试产品在标准电压下的工作情况 数字稳压电源,输出12V电压(卡车雷达24V)
显示及声响稳定精确,无数据跳 跃不定,灵敏度变值的异况.
3H
每批
测试产品在标准电压下的标准电流 数字稳压电源,输出12V电压(卡车雷达24V)
测试产品在震动条件下的可靠性
频率:5~100HZ,振幅:6mm,X,Y,Z 性能均无异常
三轴振动1Hr,其产品外观,结构,
震动后,产品无异常
防尘防水测试
用防水测试仪,0.1KPA水压,1H
IP67
8H 每批 1H 每批 8H 每批 1H 每批
42
老化测试
43
高温工作耐久性 试验
44
低温工作耐久性 试验
14H 研发阶段
测试产品的表面温度
在产品表面温度稳定时,测产品表面温度。(如果在30min 内温
度上升值不大于1℃,此种温升
≤50℃
可认为是稳定温升。)
1H
研发阶段
从上电到画面出现的时间 测试视频输出端的正向电压
数字示波器 数字示波器
<700ms 0.9~1.1V
1S
研发阶段
1MIN 研发阶段
测试2个设备之间电源电压偏移 时,是否可以正常工作
进行(即包含低温阶段)t=2h,后3个循环按1~4步骤进行(即不
包含低温阶段)t=8.5h
190H
1次/1年
测试方法:依照IEC 60068-2-11
检验产品在盐雾环境下的防锈性能
环境温度:35℃ 溶液浓度:5%±1
模定精确,无数据跳 跃不定,灵敏度变值的异况.
100H
1H 每批
38 摇摆测试 39 跌落测试 40 震动测试 41 防护等级
测试线材牢固程度
用摇摆测试仪做摇摆测试,挂50G砝码,摇摆角度:30度
≥2000次
检验产品的跌落性能
将产品固定于100g的荷重物体上,置于20cm 高度级别以产品六个 面各自由落地一次(3cm厚钢板),每次落下后,产品的外观,结构, 跌落6次无损坏。 性能均无异常。
该项绝缘电阻应不小于2兆欧,所 有性能应满足要求,所有部件都 48H 能正常工作。
研发阶段
35 装车实测
检验产品的可安装性能
1,把产品安装在汽车上,确认线材接口、长短,固定支架、螺 丝等是否满足安装要求。2,检查安装后的功能、外观等是否满 足要求。3,装车实测时,要对弹片强度、支架强度、开孔器, 线材长度等进行检验
1H
每批 研发阶段
用户汽车关闭后(电压剧烈变 化),短暂的过载是否对产品有影 响
通电测试 V1=16V V2=17V 3个周期(在10S内做完)
V3=18V
T1=1ms T2=400ms T3=600ms
3个周期无异常
10s
模拟汽车发动时,剧烈变化的电压 对产品造成的影响
通电测试
V1=18V
V2=20V
满足装车要求
4H 研发阶段
36
实际装车上路测 试
测试产品的实际使用性能
泥土路 2.沙石路 3.30度斜坡, 4.水泥路, 洗车(高压水龙头冲洗超声波传感器)。
5.沥青路,
6.
功能正常,探头不得乱报警。
720H 研发阶段
37 线材拉力测试
测试线材牢固程度
以156.8N的拉力施于连接器结合处1分钟。
线材不断裂,电气性能正常
电源干 扰
测试产品在复杂电源环境下的抗干 扰能力
将倒车雷达零部件与主机相连接,主机电源引线连接电瓶,将断 电器插座线的一端焊接在主机板的正极,另一端的焊点以连续碰 触的方式点击负极的输入焊点.
跃不定,灵敏度变值的异况.注: 液晶显示器.应无干扰条纹及死屏 1H 现像出现.摄像头摄像效果应无变
差现像
显示及声响稳定精确,无数据跳
扰能力
器上方垂直10厘米通电工作1分钟。
跃不定,灵敏度变值的异况.注: 液晶显示器.应无干扰条纹及死屏 1H 现像出现.摄像头摄像效果应无变
差现像
33
模拟安装试验
测试产品的位置、安装方法及安排 后的性能。
将倒车雷达产品传感器仿真实际装车方式安装于52+0.5cm高度的
测试
台面,传感器之间的间距应需在
用稳压电源测试产品休眠时的电流 用示波器测关机后电压波形