车辆纵向速度估算算法发展现状综述
分布式驱动电动汽车动力学控制发展现状综述_余卓平
机
械
工
程
学 报
Vo l . 4 9 Apr.
No.8 2013
JOURNAL OF MECHANICAL ENGINEERING
DOI:10.3901/JME.2013.08.105
分布式驱动电动汽车动力学控制发展现状综述*
余卓平 1, 2 冯 源 1, 2 熊 璐 1, 2
Review on Vehicle Dynamics Control of Distributed Drive Electric Vehicle
YU Zhuoping1, 2 FENG Yuan1, 2 Xቤተ መጻሕፍቲ ባይዱONG Lu1, 2
(1. School of Automotive Studies, Tongji University, Shanghai 201804; 2. Clean Energy Automotive Engineering Center, Tongji University, Shanghai 201804)
106
机
械
工
程
学
报
第 49 卷第 8 期期
综合, 它在检测到车辆动力学状态偏离稳定区间时, 通过对个别车轮施加制动力矩来改变车辆的运动状 态,提高车辆的主动安全性。 通过制动方式进行稳定性控制带来的不良后 果是速度损失,即其降低了汽车三大基本功能中的 行驶能力(另两大功能是停车与转向),同时 ESP 有 明显介入感,易对驾驶员产生干扰[3]。因此,一些 国外汽车公司开始研究基于转矩矢量分配控制 (Torque vectoring control,TVC)技术的动力学稳定 该技术实现了动力学控制从对各个车 控制系统[4-6]。 轮的转矩与滑移率控制到面向全轮的转矩分配控制 的转变。相比传统 ESP,转矩矢量分配控制的控制 范围进一步扩展(图 1), 均衡各轮胎的路面附着利用 率,增加车辆稳定性裕度。传统汽车上的转矩分配 控制基于复杂的四驱机械装置,通过差速与锁止控 制以及对驱动轮上施加液压制动以改变转矩,实现 对各轮转矩的分配。由于其系统极其复杂和昂贵, 目前的应用仅限于豪华运动汽车。如图 1 所示,转 矩矢量控制可以弥补电子稳定性程序控制的死区, 但受到主动差速器转矩分配能力的约束,其在极限 工况下的控制能力不足。
车辆纵向位置x计算公式

车辆纵向位置x计算公式
在车辆行驶过程中,我们经常需要计算车辆的纵向位置x,以便更好地理解车辆的运动状态。
车辆纵向位置x可以通过以下公式来计算:
x = v0 * t + (1/2) * a * t^2
其中,x表示车辆的纵向位置,v0表示车辆的初始速度,t表示时间,a表示车辆的加速度。
这个公式可以帮助我们预测车辆在不同时间点上的位置,从而更好地规划行车路线或进行车辆控制。
通过输入初始速度和加速度,我们可以得到在任意时间点上车辆的纵向位置。
当车辆的初始速度为0时,上述公式可以简化为:
x = (1/2) * a * t^2
这个公式可以帮助我们计算车辆在匀加速运动下的纵向位置。
通过输入加速度和时间,我们可以得到车辆在任意时间点上的纵向位置。
车辆的纵向位置对于驾驶员来说非常重要。
它可以帮助驾驶员了解车辆的当前位置和即将到达的位置,从而更好地掌控车辆的行驶。
此外,通过对车辆纵向位置的计算,我们还可以进行车辆的动态控制和路径规划,以保证车辆行驶的安全和高效。
总结起来,车辆纵向位置x的计算公式为x = v0 * t + (1/2) * a * t^2,它可以帮助我们预测和控制车辆在不同时间点上的位置。
通过合理运用这个公式,我们可以更好地理解和掌控车辆的运动状态,提高行车的安全性和效率。
车辆纵向速度估算算法现状及趋势

车辆纵向速度估算算法现状及趋势专业:控制理论与控制工程班级:2008学生姓名:梁晋昌学号:20080201008导师:韩峻峰2010年3月8日车辆纵向速度估算算法现状及趋势梁晋昌(广西工学院电子信息与控制工程系,广西柳州545006)摘要:在车辆行驶过程中,纵向速度是车辆主动安全系统中的重要信息。
在制动防抱死(ABS)和驱动防滑系统 (ASR)中,纵向车速是计算纵向滑移率、保持车辆行驶稳定性的重要参数。
对现存的车辆纵向速度算法进行了分类综述,将其分为基于基本信息的直接计算方法和基于模型信息的间接计算方法两大类,对各种方法的优缺点进行了讨论,并对其发展趋势进行了展望。
关键词:纵向速度;速度估计;车辆模型Abstract: Vehicle is in motion the process, the vertical velocity of vehicle active safety systems in the important information. Anti-lock braking (ABS) and drive-slip system (ASR), the vertical speed is to calculate the vertical slip rate to maintain the stability of vehicles an important parameter. Vehicle longitudinal speed of the existing algorithms are classified overview of basic information will be divided into based on the direct calculation method and model-based information on the indirect method of calculating two categories, the advantages and disadvantages of various methods were discussed, and its development trends predicted.Key words: Longitudinal velocity; Velocity estimation; Vehicle Model0 引言在车辆行驶过程中,纵向速度是车辆主动安全系统中的重要信息。
重型车辆质量估算的研究

10.16638/ki.1671-7988.2021.011.037重型车辆质量估算的研究吴皓,李炎亮,李锦,刘淼*(上海工程技术大学机械与汽车工程学院,上海201620)摘要:诸如电子稳定控制(ESC)系统之类的车辆控制系统的发展需要对重型车辆的质量进行准确估算。
特别是,消防车的总质量根据灭火泡沫量而有很大差异。
文章提出使用带有遗传因子的递推最小二乘法,用于实时车辆质量估计。
基于车辆纵向动力学模型,使用TruckSim软件对4x2重型车辆进行建模,并使用递推最小二乘法来估算车辆质量。
最后,根据变电站的无人消防车的行驶环境,仿真验证了所提出的重型车辆质量估算方法。
关键词:估计质量;车辆质量;递推最小二乘法中图分类号:U467 文献标识码:A 文章编号:1671-7988(2021)11-117-03Development of Heavy Vehicle Mass Estimation AlgorithmWu Hao, Li Yanliang, Li Jin, Liu Miao*(School of Mechanical & Automotive engineering, Shanghai University of Engineering Science, Shanghai 201620)Abstract:The development of vehicle control systems, such as the electronic stability control(ESC) system, requires an accurate estimation of a heavy vehicle’s mass. In particular, the total mass of fire trucks varies widely according to loading the amount of fire fighting foam. This paper presents a real-time vehicle mass estimation algorithm by using the recursive least squares method with forgetting. Based on the vehicle longitudinal dynamics model, a 4x2 heavy vehicle was modeled by using the TruckSim software and the estimated vehicle mass was calculated by using the recursive least squares method with forgetting. Finally, according to the driving environment of the unmanned fire truck in the substation, simulation verifies the proposed heavy-duty vehicle quality estimation method.Keywords: Estimation mass; Vehicle Mass; Recursive Least SquareCLC NO.: U467 Document Code: A Article ID: 1671-7988(2021)11-117-03前言为了确保车辆的行驶稳定性,需要实时准确地测量行驶中的车辆的质量,从而通过准确地掌握车辆的质量,可以有效地分配施加到前轮或后轮的制动力。
车辆行驶过程中的状态估计问题综述
道车轮的运动状态(大驱动力下严重打滑,大制动力
下抱死),从而更有利于权重系数的决定。
1.1.2 纵向加速度信号的修正
当采用纵向加速度传感器来辅助车速估计时,
必须考虑:在低速、低加速度情况下传感器的信噪
22
机械工程学报
第 45 卷第 5 期期
比不高、容易出现偏置,或者当车辆行驶于坡道上,
纵向加速度由于重力的缘故产生一定偏置。文献[32]
ax (k
+
i)
(2)
1.1.3 弯道行驶时轮速信号的修正
当车辆行驶于弯道时,内外车轮间会形成轮速
差,如果直接使用这些轮速信号,会对车辆纵向车
速估计会产生一定的误差。弯道行驶时的轮速需要
通过横摆角速度、质心侧偏角进行修正
式中
⎧⎪vwfl ⎪
= vcog
−
ψ
⎛ ⎜⎝
bf 2
−
lf
β
⎞ ⎟⎠
⎪⎪⎪vwfr
纵向车速估计用传感器配置的方案介绍如表 1 所示。
表 1 纵向车速估计用传感器配置方案
序号
传感器配置方案
参考文献
1 四轮轮速+纵向加速度 2 非驱动轮轮速+纵向加速度 3 转向盘转角+横摆角速度+侧向加速度+方案 1 4 仅四轮轮速信号 5 制动踏板+油门踏板+方案 1
[25-31] [32] [33] [34] [35]
bf , br ——前、后轮距 lf , lr ——质心到前、后轴距离 β ——质心侧偏角
1.2 横摆角速度估计用传感器配置
从公开发表的文献来看,单纯估计车辆横摆角
速度的研究不多。这是因为半导体技术的发展,普
无人驾驶车辆编队纵向控制器中安全车距与车速分析
无人驾驶车辆编队纵向控制器中安全车距与车速分析1. 引言1.1 研究背景无人驾驶技术是近年来快速发展的领域之一,已经成为人工智能和自动驾驶领域的热门话题。
随着无人驾驶技术的不断成熟和普及,无人驾驶车辆编队技术也逐渐引起了研究者和行业的重视。
无人驾驶车辆编队技术可以实现车辆之间的高效合作和协同行驶,提高道路交通的效率和安全性,对未来智能交通系统的发展具有重要意义。
在实现无人驾驶车辆编队行驶过程中,纵向控制器的设计对于确保车辆之间的安全车距和合适的车速至关重要。
研究如何设计一套有效的纵向控制器,使得无人驾驶车辆在编队行驶时能够保持安全距离和适当车速成为当前研究的一个重要方向。
本文将针对无人驾驶车辆编队纵向控制器中安全车距与车速进行深入分析和探讨,为该领域的研究和实践提供一定的参考和指导。
1.2 研究意义无人驾驶车辆编队纵向控制器的研究意义在于提高车辆间的安全性和效率。
随着无人驾驶技术的逐渐成熟,无人驾驶车辆编队已经成为未来智能交通系统的一个重要发展方向。
而纵向控制器作为无人驾驶车辆编队中的关键组成部分,其安全车距与车速的控制对于整个编队系统的稳定性和安全性至关重要。
深入研究安全车距与车速之间的平衡关系,可以为无人驾驶车辆编队的实际应用提供重要参考和指导,缩短车辆之间的距离,提高编队的效率和容量。
通过对无人驾驶车辆编队纵向控制器中安全车距与车速的分析,不仅可以提高编队车辆的运行效率,还可以有效减少交通事故的发生,推动智能交通系统的发展,为未来城市交通管理和智能化运输系统的发展做出贡献。
2. 正文2.1 无人驾驶车辆编队纵向控制器概述无人驾驶车辆编队纵向控制器是一种关键的技术,用于实现多辆无人驾驶车辆在纵向方向上保持安全距离并协同行驶。
该控制器的设计和优化对于确保车队安全性和效率至关重要。
编队纵向控制器通常包括车距控制和车速控制两个主要部分。
车距控制主要负责调节车辆之间的间距,保证车辆之间的安全距离,避免碰撞。
基于预瞄的车辆路径跟踪控制研究

基于预瞄的车辆路径跟踪控制研究1. 本文概述随着现代交通系统的迅速发展,车辆路径跟踪控制作为智能交通系统的重要组成部分,其研究对于提高车辆行驶安全性和效率具有重要意义。
本文旨在探讨基于预瞄理论的车辆路径跟踪控制方法。
预瞄控制策略通过预测车辆未来状态,提前做出控制决策,从而实现更平滑、更稳定的车辆行驶路径。
本文首先对车辆路径跟踪控制的相关理论和研究现状进行综述,分析现有方法的优缺点。
接着,详细介绍预瞄控制策略的基本原理和关键技术,包括预瞄距离的选取、车辆动力学模型的建立以及控制算法的设计。
通过仿真实验验证所提出控制策略的有效性和优越性。
本文总结研究成果,并对未来研究方向进行展望,以期为进一步提高车辆路径跟踪控制的性能和实用性提供参考。
2. 预瞄理论基础预瞄理论是车辆路径跟踪控制研究中的一个重要概念,它源于人类驾驶员在驾驶过程中的视觉行为。
在车辆行驶过程中,驾驶员通常会将目光提前投向道路前方,预测车辆未来的行驶轨迹,并根据这些信息调整方向盘,以确保车辆能够稳定地沿着期望路径行驶。
预瞄理论正是模拟了这一过程,并将其应用于车辆路径跟踪控制中。
预瞄理论的核心思想是,通过引入一个预瞄距离,来预测车辆在未来的某个时刻的位置和状态,从而提前进行控制决策。
预瞄距离的选取是预瞄理论中的关键问题,它直接影响到控制系统的性能。
预瞄距离过短,会导致车辆对路径变化的响应过于敏感,容易产生振荡预瞄距离过长,则会使车辆对路径变化的响应过于迟缓,降低跟踪精度。
预瞄理论在车辆路径跟踪控制中的应用,主要是通过设计一个预瞄控制器来实现。
预瞄控制器通常包括两部分:预瞄模块和控制模块。
预瞄模块负责根据预瞄距离预测车辆的未来状态,而控制模块则根据这些预测信息,生成控制信号,对车辆进行控制。
预览控制器的设计需要考虑车辆的动力学特性、路径特性以及控制目标等因素。
预瞄理论在车辆路径跟踪控制中的应用,可以有效地提高车辆的跟踪精度和稳定性,提高驾驶员的驾驶舒适性和安全性。
智能汽车横向控制方法研究综述

一、智能汽车环境感知方法分类
一、智能汽车环境感知方法分类
智能汽车环境感知主要分为两类:直接感知和间接感知。
1、直接感知
1、直接感知
直接感知是指通过传感器等设备直接获取汽车周围环境信息。常见的直接感 知方法包括超声波感知、毫米波雷达感知、激光雷达感知和视觉感知等。
2、间接感知
2、间接感知
间接感知是指通过分析车辆自身状态和行驶环境等信息,推断出周围环境情 况。间接感知主要依赖于车辆导航信息、高精度地图、惯性测量单元(IMU)、 GPS等。
谢谢观看
三、智能汽车环境感知发展趋势
驶安全和行驶效率。此外,随着5G、V2X等通信技术的发展,智能汽车将能够 实现车与车、车与路、车与云的智能互联,进一步提升驾驶体验和行车安全。
四、总结
四、总结
智能汽车环境感知是实现自动驾驶的关键技术之一,其发展受到多种因素的 影响。未来随着传感器技术、和通信技术的不断进步,智能汽车环境感知将朝着 更高效、更可靠、更智能的方向发展。随着自动驾驶应用场景的不断扩展和深化, 智能汽车环境感知也将面临更多的挑战和机遇。
四、实验结果
棒性。同时,通过实验数据可以看出,该控制方法能够减小车辆行驶过程中 的横向偏差和航向角偏差,提高车辆的路径跟踪精度。
五、实验分析
五、实验分析
实验结果说明了基于模型预测控制的路径跟踪横向控制方法在智能车辆路径 跟踪中的可行性和优越性。该方法能够根据车辆的实际运行状态和环境信息进行 实时调整,从而有效地提高车辆的路径跟踪精度和安全性。同时,该方法还能够 处理复杂的干扰因素,具备良好的鲁棒性和自适应性。
二、研究现状
在国内,相关研究起步较晚,但进展迅速。国内学者针对智能车辆路径跟踪 横向控制方法进行了大量研究,提出了多种有效的控制策略。例如,基于强化学 习的路径跟踪控制算法、融合导航与感知信息的路径跟踪方法等。这些研究成果 在一定程程度上推动了国内智能车辆技术的发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车辆纵向速度估算算法发展现状综述徐倜凡 高晓杰 (同济大学)摘要 车辆的纵向车速是车辆主动安全系统的重要参考信息,在制动防抱死(A BS )和驱动防滑系统(A SR )中,纵向车速是计算纵向滑移率、保持车辆行驶稳定性的重要参数。
文章对现存的车辆纵向速度算法进行了分类综述,将其分为基于基本信息的直接计算方法和基于模型信息的间接计算方法两大类,对各种方法的优缺点进行了讨论,并对其发展趋势进行了展望。
主题词 交通安全 汽车 纵向速度收稿日期:2007-03-120 前言车辆行驶过程中的纵向速度是车辆主动安全系统中重要的参考信息。
对车辆稳定性有重要影响的滑移率计算,需要用到当前车速。
车速传感器能够比较准确地测出车辆的纵向速度,但价格昂贵,安装要求高(离地面有一个标准距离),非接触式光学传感器镜头容易受到污染而失效,因而限制了它在量产车型上的应用。
目前,量产汽车的主动安全系统所使用的车速信号均采用估算方法获得。
因此,能否准确计算出车速,是影响车辆主动安全系统性能的一个重要因素。
1 国内外研究现状由于技术保密等原因,ABS 、ESP 生产厂商对车速估算算法不予公开。
从公开发表的文献和专利来看,车速估算算法无外乎两种:一是基于轮速和车身加速度等基本测量信息的直接换算方法;二是基于模型间接估计的方法。
下面本文就从这两个方面出发,来介绍车速估算算法。
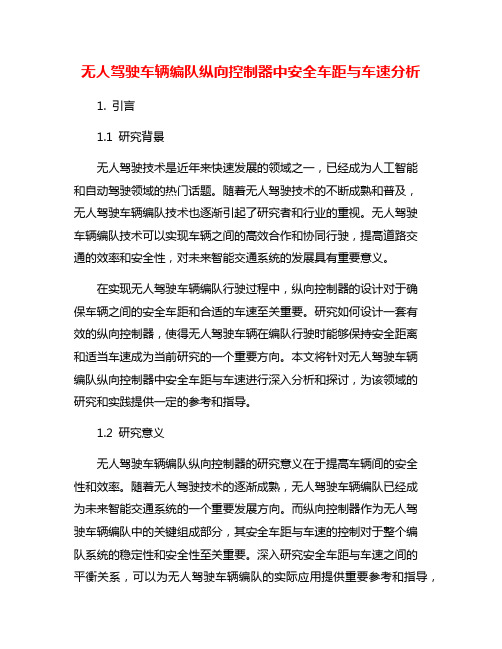
车速算法的分类见图1。
1.1 基于基本信息的直接计算方法利用基本信息直接转换计算获得车速,是指图1 参考车速的计算方法分类利用轮速直接乘以滚动半径来获取车速或者利用加速度信号与速度信号之间的积分关系来获取车速信号。
该算法简单直接,估计时无须考虑车辆模型,只需对原始信号进行处理就可得到车速。
根据估计算法所需信息可把该方法分成3类,分别是使用轮速信息、使用轮速和加速度信息以及使用轮速、加速度和车辆横向状态信息。
1.1.1 仅使用轮速信息的算法最早提出的是最大轮速法(适合于制动工况,驱动时为最小轮速法),也就是通过实时选取4个轮速中的最大值来进行参考车速的计算。
其优点是无需进行路面识别,算法简单。
缺点是受到ABS 调节的影响,计算误差较大。
第二种是自适应非线性滤波法,见图2。
可以看到,初始阶段的估计效果与所选取的图2 利用非线性滤波法计算的参考车速初始加速度有很大的关系。
该方法只适用于车辆在ABS介入时的车速估计(需要波动的轮速),并且有一个假设前提,即由ABS控制的车轮,其转速达到局部极值时,车轮达到近似纯滚动状态,这个假设前提是否成立会对参考车速的计算精度产生重大影响,该方法的优点很明显,他对于不同的路面具有很强的适应能力。
另外一种是递推法,利用当前时刻的角速度、角加速度、参考车速和滑移率的变化率递推地估计当前时刻的加速度值,并积分获得当前的车速值。
该方法的一个明显缺点就是缺少对积分积累误差的修正。
另外,其他的一些估计方法如两轮驱动车辆在驱动工况下以非驱动轮轮速估计车速,或在非极限工况下简单地将四轮轮速平均一下得到车速,这些方法在对车速精度要求不高的条件下也是很有用的。
采用轮速信号的算法其共同优点是算法简单,实时计算能力强,实现方便,所使用的信号可以从ABS的轮速传感器中直接获得,因而无需附加其他传感器,成本低廉。
但缺点是由于只有四轮轮速,测量噪声会对估计的精度产生较大的影响,并且该方法只适用于某个或某些工况中的近似计算。
1.1.2 使用轮速和加速度信息的算法(1)利用车身加速度信号对轮速进行修正的算法该算法的系统框图如图3。
首先详细分析噪声产生的原因,把系统噪声归结于加速度真值、轮胎滚动半径以及轮速的突变,并以车体加速度真值、由轮速直接转化而来的车速和滚动半径的变化值作为状态量,加速度量测值和速度量测值作为量测变量,使用卡尔曼滤波器滤除噪声,最后根据轮速估计值和滚动半径变化值来计算最终的车速。
该方法具有更高的估计精度,能够在一定程度上滤除噪声的影响。
但其调整协方差矩阵的规则只适应一种路面,所以在路况连续变化时,该方法的精度会降低,并且由于频繁地改变协方差矩阵,闭环算法的稳定性也值得商榷。
图3 采用轮速修正的参考车速算法框图(2)利用轮速信号对加速度进行修正该计算法的思路是构造3个卡尔曼滤波器,其中两个分别用来滤除加速度量测值和轮速量测值的测量噪声,然后通过对车身加速度进行积分,并让第3个卡尔曼滤波器使用输入的轮速去修正积分得到的车速。
当然,为了使卡尔曼滤波器能够适应不同的系统噪声以及不同的滑移率,使用了模糊控制器实时调整噪声协方差矩阵。
该方法的缺陷在于,由于轮速测量噪声的修正不是自适应的,会造成轮速与真值的偏离,影响到后一个滤波器的效果,造成积分运算的积累误差。
另外,3个卡尔曼滤波器会延长计算时间,影响实时性。
在硬件实现上,由于卡尔曼滤波器需要进行矩阵逆运算,因而算法在微处理器中的应用比较困难。
(3)综合法综合法兼顾了上述两种估计算法的优点,分别使用当前轮速,以及上一步的车速估计值和当前质心加速度计算出车速。
然后再根据滑移率或车轮的角加速度来实时分配两种估计的权重,最后加权平均来获得最终的车速估计值。
该方法的优点在于可以充分利用轮速信号在通常情况下能较准确地反映车速,而加速度信号在车轮滑移率较高时计算车速的优势,模糊控制器也比较容易应用于硬件电路,是一种比较可行的实时估计算法,但以模糊规则合理为前提,并且如果希望估计精确,需要的专家知识就越多,模糊规则也就越多,这就需要大量的实车试验才能提取出合理的模糊规则。
1.1.3 使用轮速加速度和其他信息的车速估计前面两种方法都只考虑直线行驶工况,如果带有转向输入,就需要加入侧向加速度、转向轮转角以及横摆角速度等信号,也就是基于多个信号的估计。
主要方法可分为以下几种。
(1)把车速分为非滑动部分和滑动部分,分别计算后相加的方法。
先利用各轮轮速、加速度、横摆角速度和转向角信号,用6种不同的方法计算出纵向车速值,取其中最小值为参考车速,然后根据轮速算出各车轮中心的纵向速度,如果左右轮中心的纵向速度之差超过某一阈值,或者左右后轮中心速度的平均值高于某一阈值时,判断车辆处于转向工况,反之则取参考车速为非滑动状态下的估计车速。
如果被判定处于转向工况,则根据下式计算非滑动估计车速:V U`x =t f cos (d )sin (d )t r -t f cos (d )[cos (d )-sin (d )tan (b )]l f wz 最后根据加速度、路面坡度信号和侧偏角估计值计算出滑动状态下的车速修正值,并将两部分的车速相加得到最终的参考车速。
这种方法能够适应各种工况,且没有使用复杂的算法,但是它没有考虑到噪声问题,对路面的适应能力不够强,因为某些阈值的选取与路面的状态有关,另外,该方法需要的传感器较多,直接增加了使用成本。
(2)基于车辆状态识别的方法。
先将行驶中的危险工况分成若干种∀∀∀转向时快速松开油门踏板,分离系数路面制动,转向强制动和过度转向前轮侧滑,并研究每一种工况时车辆的状态变量有什么特点,在实际行驶时,先根据状态变量的值分析车辆处于什么工况下,根据不同的选择采取不同的计算公式来计算车速。
这种方法能否有效地估计车速,取决于状态变量的选取和判断,以及在该工况下的车速算法是否有效。
(3)将转向工况车速等效到直线工况车速的方法。
利用各个传感器信号对轮速和加速度进行修正,然后根据加速度、各轮滑动率利用模糊控制器选择加权系数。
最后对4个基于轮速的估计值和基于加速度的估计值进行加权平均得到最终的参考车速。
其不同之处在于,他们最后仅使用了修正的加速度信号来计算车速,属于多变量估计里的基于加速度算法。
1.2 基于模型的车速估计方法车速估计的另一条思路就是基于车辆模型的估算算法,即利用原始信号经过数据预处理之后,将其输入车辆模型,然后提取模型的状态信息或输出信息作为估计结果,这是一种间接的估计方法,其准确度直接受到车辆模型精度的影响。
1.2.1 基于力的估计利用车辆模型的车速算法中较常用的是基于力的估计。
该方法可以概括为两个步骤,首先建立车轮的动力学方程,以制动力或驱动力作为输入,计算得到轮胎与地面间的纵向力,然后建立一个车辆模型,并以此作为输入算出车辆的纵向速度。
国外,所使用的车辆模型大多为七自由度模型,可以适用于一般的行驶工况,而国内,基本上都采用自行车模型或单轮模型,只适用于直线制动或驱动工况。
基于力的方法有一个关键问题在于如何获取力,使用六分力仪成本过高,体积大安装不便,无法量产化。
在轮胎模型准确时的力估计效果比较好,但该方法必须对轮胎和车辆进行非常精确的建模,否则其估计效果会迅速恶化,由于基于力的方法既涉及到整车模型又涉及到轮胎模型,受到模型精度的制约,并且在绝大多数情况下车辆模型的参数是时变的,同时外界的干扰也无法预测,这可能导致估计结果产生较大的误差。
而且,由于计算流程长,计算量大,实时性难以保证。
1.2.2基于多变量共同估计另一种基于模型的估计方法就是基于多变量共同估计的方法,基本思路是利用车辆动力学方程,把车辆的横摆角速度作为一个时变的参数,把车辆的纵向和横向加速度作为输入变量,就可以利用该状态方程同时估计出纵向和横向车速。
这种方法的好处在于,不会受到整车参数和轮胎模型的影响,估计流程相对简单。
缺点在于,需要加装横摆角速度传感器和加速度传感器,增加了使用成本,且该方法归根结底是根据加速度积分得到车速,本身并不带有反馈,所以随着时间的推移,必定会有积分积累误差。
另外,同其他基于模型的算法一样,该方法主要用于横向车速的估计,纵向车速的估计并不是重点。
2 存在的问题和研究方向国外对纵向车速估计的研究已有较长时间,从简单轮速算法逐渐发展到近几年以多传感器的信息融合为基础,以及以路面辨识为基础的估计算法,越来越注重对车辆横向、纵向状态信息的利用,这说明纵向车速的估计已经从原来的只适应单一工况向能适应多种工况发展,估计值的精度和估计算法的鲁棒性都有了一定程度的提高。
但是,这些研究几乎都使用试验数据进行离线仿真,没有实时在线的估算结果,无法获知其在实际应用中的表现。
国内车速算法与国外有很大的差距,近年来陆续有一些研究,但大多还停留在针对某些工况的算法,很少对弯道行驶工况下的纵向车速算法进行研究,估计精度也不甚理想。
所以,将来国内研究方向是基于多工况、多传感器信息、易于硬件实现、能保证估计精度和实时性的车速算法。
参考文献1 Fang J un ji ang,Zh i Q i anggao.An A dapti ve Non li n ear F ilter Approach to the Veh icl e V el oci ty E sti m ati on f or ABS Proceed i ng of t he 2000I EEE In ternati onal Con ference on Control Appli cati ons,20002 Ka ji ro W atnabe.Ab s ol u te Sp eed M eas ure m ent of Au to m ob il ef or m N ois y A ccelerati on and E rroneous W h eel Sp eed Infor m ati on,SAE paper920644 3 A.Daiss,U.K i en cke.Es ti m ati on ofVeh icl e Speed Fu zz y-E s ti m ati on i n Co m pari son w ith K al m an-Filteri ng IEEE,19954 Kasuyuk iKob ayas h.i E sti m ati on ofAb s olute Veh icl e Speed U s i ng Fuzzy Logic Ru le-Bas ed Kal m an F ilter Proceed i ng of Am ericanC ontrolC on f eren ce,19955 Ch ri stophe Z i m m er.Fu zz y Approach f or Real T i m e Longit ud i nal Vel ocit y E sti m ation of Road Veh icl e i n C ritical S i tuation AVEC, 19966 Lars I m s l and.V eh i cle Vel ocit y E sti m ati on U si ng N on li ear Ob servers Auto m atica42,20067 U.K i en cke.Au to moti ve Contro lS yste m Spri nger V erlag,19998 J i anbo Lu.M ethod for Det er m in i ng a Long i tud i nalVeh icl e Ve l oci ty by Co m pensati ng Ind i vidu alW h eel Speeds U si ng P it ch A ttit ude, U.S.Paten t6915193B29 J i anbo Lu.M ethod for Det er m in i ng a Long i tud i nalVeh icl e Ve l oci ty by Compen sati ng Ind i v i du alW heelSp eeds,U.S.Patent6847875 B210 Chu lK i song.Veh icl e Speed Esti m ati on U si ng A ccel ero m eter and W h eel Speed M eas u re m ents,SAE paper2002.01A bstractThe long itudi n al velocity is the i m po rtant refer ence to the acti v e safety syste m of the veh i c le,and al so the i m portan t re ference to the long it u dina l sk i d i n ABS and ASR.So,the ex istent long itudina l ve l o c ity esti m ati o n m ethod of t h e vehic le is su mm arized sys te m atica lly,and is classified i n to the d irect m ethod based on the basic i n fo r m ation and the i n d irectm eth od based on the m odel i n f o r m ation.Then the advan tage and d isadvantage of the t w o m ethods i s d is cussed,and t h e developm ent trend is prospected.。