燃料电池汽车用电机驱动系统选型及性能参数研究_程伟
燃料电池汽车动力系统仿真分析及控制策略研究

燃料电池汽车动力系统仿真分析及控制策略研究作者:梁满志囤金军范志先冯海明来源:《时代汽车》2020年第07期摘要:本次研究以燃料电池客车为原型,提出了燃料电池和动力电池组成混合动力的优化措施,希望能够满足特殊工况下能量和动力需求,提升燃料电池客车各项动力性能指标。
现结合仿真结果分析模糊控制策略,对燃料电池的功率需求进行了控制改进,希望可提升燃料电池汽车动力系统仿真分析和控制处理质量,全面降低燃料电池输出功率波动影响。
关键词:燃料电池汽车;动力系统;仿真分析;控制策略本文立足于不可再生能源短缺和环境污染问题,结合现代动力汽车生产要求,迫切研究清洁能源代替现有能源的措施建议。
随着现代经济建设发展,美国,中国,德国,都推出了燃料电池供能计划,以改善传统能源供给系统稳态负载不当以及燃料供应不足等问题。
为解决这一问题,现分析燃料电动汽车动力系统模型,提出燃料电池+动力电池的处理方式,希望能为创新燃料电池汽车动力系统设计奠定基础,现将研究分析阐述如下。
1 简述燃料电池汽车动力系统1.1 电动汽车动力组成目前,燃料电动汽车动力系统内设DCDC、驱动电机、燃料电池、辅助能源等系统组成,混合多能源的形式存在,目前可用的方式有“超级电容+燃料电池”、“动力电池+燃料电池”几种,且超级电容的充电性能快,可以实现最大程度的放电,而储存能源和空间有限,只能够提供大约1min的峰值功率。
针对其辅助能源特征来看,可采用燃料电池+动力电池的混合动力形式[1]。
燃料客车运行中,其中的DC/DC和动力电池经过并联处理后为整个整车动力系统提供能量来源,后期可通过调节DCDC调整输出功率来改变电池的输入、输出表现。
并保护燃料电池,让其安全运行。
按照该方式对比混合电源体积和质量比,本方案可以稳定动力系统电源电压,预防电压波动,也节省操作空间。
1.2 燃料電池和动力电池的特征研究从理论上来讲,燃料电池动力汽车系统其可以达到很高的效率,实现化学能源向电能高效转换[2]。
燃料电池汽车用电机驱动系统选型及性能参数研究_程伟
表 2 动力性指标
最高车速 ( km / h) 最大爬坡度 ( % ) 加速时间 (0~100 km / h) ( s)
150
25
15
表 3 某电机驱动系统性能指标
峰值特性 持续特性 制动特性
Tmax (Nm ) 230 Te (Nm ) 100 Tr (Nm ) 230
Pmax ( kW ) 96 Pe ( kW ) 42 Pc ( kW ) 32
下式计算 :
t
=
1 3. 6
∫uα 0
Ft
-
δm (m gf + Cd A u2 /21.
du 15)
(3)
式中 , t为加速时间 , s;δ为汽车旋转质量换算
系数 ; Cd 为空气阻力系数 ; A 为汽车迎风面积 , m2 ; u为车速 , km / h, (与电机转速 n 换算关系参见式
(1) ) ; Ft 为电机输出折算到车轮的牵引力 ,为 :
参考文献
1 杨国良. 电动车电机驱动控制技术的研究现状及其发展趋 势 [ J ]. 实验室研究与探索 , 2005 (11) 1
2 赵硕 ,张缓缓 ,王庆年. 混合动力汽车电机恒功率特性研究 [ J ]. 微电机 , 2005 ( 3) .
3 何洪文 ,余晓江 ,孙逢春等. 电动汽车电机驱动系统动力特 性分析 [ J ]. 中国电机工程学报 , 2006 (6).
4 张林 ,杜子学 ,朱海峰等. 电动汽车的再生制动控制策略研 究及仿真 [ J ]. 北京汽车 , 2006 (5).
A bstract
From vehicle developm ent point of view, the performance of different electric motor drive system is analyzed, and general selection p rincip le of electric motor drive system for fuel cell vehicle is p resented. Thus peak, continuous and recuperative working con2 dition is p resented for power train design. The simu2 lation result show s the method can comp lete the de2 sign of electric motor drive system for fuel cell vehicle conveniently and effectively, and it also has engi2 neering p ractical value.
一种电动汽车用驱动电机系统性能评价方法

一种电动汽车用驱动电机系统性能评价方法乔维德【摘要】According to the performance characteristics of the driving motor for electric vehicle,analysis of motor control performance,motor body design and enterprise qualification from the drive motor system,applying of analytic hierarchy process (AHP) to determine the performance evaluation index system and index weight of the driving motor,a BP neural network model of performance evaluating for drive motor,and the chicken group algorithm (CSO) was used to optimize the model.The simulation results showed that the performance evaluation method of drive motor based on AHP and CSO-BP neural network has the advantages of high speed and high accuracy,and get satisfactory result,this have good engineering practical value to evaluation,selection and application for electric vehicle drive motor system.%根据电动汽车用驱动电机性能特点,从驱动电机系统的电机控制性能、电机本体设计、企业资质能力等不同维度分析,应用层次分析法(AHP)确定驱动电机性能评价指标体系及其指标权重,建立驱动电机性能评价的BP神经网络模型,并采用鸡群优化算法(CSO)对其模型进行优化.仿真实例表明,基于AHP和CSO-BP神经网络的驱动电机系统性能评价方法,具有评价速度快、准确率高等优点,并得到满意的评价结果.这对于电动汽车驱动电机系统的评价、选择与应用,具有较好的工程实用价值.【期刊名称】《电机与控制应用》【年(卷),期】2017(044)007【总页数】7页(P115-121)【关键词】电动汽车;驱动电机;层次分析法;鸡群优化算法-BP神经网络;评价【作者】乔维德【作者单位】无锡开放大学,江苏无锡214011【正文语种】中文【中图分类】TM301.2目前,新能源汽车正处于逢勃发展阶段。
燃料电池客车动力系统参数匹配及控制策略研究韩经鲁张振东李泽滨孙玉萍

燃料电池客车动力系统参数匹配及控制策略研究韩经鲁张振东李泽滨孙玉萍发布时间:2023-05-30T15:14:43.476Z 来源:《科技新时代》2023年6期作者:韩经鲁张振东李泽滨孙玉萍[导读] 在燃料电池车辆的设计中,动力系统的参数匹配是一个非常关键的问题,它直接关系到车辆的功率和经济性。
本论文主要针对一种基于燃料电池技术的大巴,对该大巴的动力系统主要参数进行了分析,并基于该大巴的控制策略进行了研究。
中通客车股份有限公司山东省聊城市 252000摘要:在燃料电池车辆的设计中,动力系统的参数匹配是一个非常关键的问题,它直接关系到车辆的功率和经济性。
本论文主要针对一种基于燃料电池技术的大巴,对该大巴的动力系统主要参数进行了分析,并基于该大巴的控制策略进行了研究。
最后,给出了一种新的控制策略。
基于 MATLAB/Simulink软件,建立了汽车行驶过程的模拟平台,并对其进行了模拟和分析。
研究结果显示,本课题所研制的大巴动力系统具有较好的性能,能够满足大巴的动力性需求,并在此基础上,采用模糊控制方法对大巴进行能量管理,以确保大巴在运行中的稳定性与安全性。
模拟计算结果显示,该方法能在市区行驶时,有效地减少燃油消耗,减少尾气排放。
关键词:燃料电池;参数匹配;控制策略引言近年来,在我国节能减排与新能源汽车发展的背景下,利用燃料电池技术的车辆受到人们的高度重视与研究。
与传统燃油汽车相比,燃料电池汽车具有零排放、零噪音、高动力性能等优点,并且能够在电力和燃料两种模式之间进行灵活的切换,特别适用于城市公交、长途客车等移动出行。
在城市道路上行驶时,由于交通拥堵,造成了燃料电池车辆的油耗增加,尾气排放增加。
一、动力系统参数匹配燃料电池客车的动力系统由发动机、燃料电池、动力电池组、驱动电机、变速器等构成,燃料电池和电机主要是通过驱动电机与变速器相连,燃料电池与传动装置的联结方式是决定汽车最高车速及最大爬坡速度的关键因素。
燃料电池汽车动力系统运行效率研究
燃料 电池 汽 车 动 力 系统 运 行 效率 研 究
殷婷 婷 黄晨 东 程 伟 欧 阳启 孙逸神 ( 上海汽车集团股份有限公司, 上海 2 10 ) 084
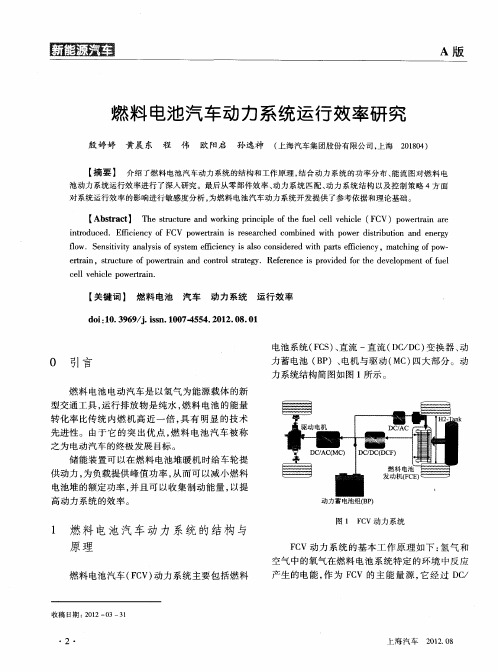
【 摘要】 介绍了 燃料电 池汽车 动力系 统的 结构和工作原理, 结合动力系统的功率分布、 能流图 对燃料电
池动力 系统运行效率进行 了深入研究。最后从 零部件效 率、 力系统匹配 、 动 动力 系统结构 以及 控制策 略 4方面 对 系统运行效率 的影响进行敏感度分析 , 为燃料 电池汽车动力系统开发提供了参 考依据 和理论基础 。
【 bt c】 T e t c r adw r n i ie fh e c l eie( C )pw ra r A s at r h r t e n o i p n p e ul e h l F V o e rna su u k g r c l o t f lv c ti e
运行 的经 济性 。
图 2~ 4是 9个 N D E C工 况 下 , 电机 功 率情 况
2 动力 系统 介 绍
本文 以上 汽 开发 的某 款 燃 料 电 池 汽 车 为 例 , 针对 动力 系统 运行效 率进 行分 析 。 2 1 整车 参数 ( 1 . 表 )
表 1 整 车 参 数 表
参数 数 值 参 数 风 阻 系数 c 滚 阻 系数 _ 厂 数值 0 3 .2 0 O .1
的分 析 , 中 , 2是 电机 功 率 的 曲线 图 ; 3是 其 图 图 电机 功 率 的 分 布 图 ,电 机 功 率 在 0 —5 W、 k
5~1 W、0~1 W 区间范 围 工作 的频 率 最 高 , 0k 1 5k 比例分 别为 3 . 8 、 3 8 % 、1 . % ; 4为 0 2 8 % 2 .2 84 图
不同新能源乘用车的驱动电机类型和参数

第一部分:引言作为汽车行业发展的新热点,新能源乘用车在市场上越来越受到关注。
在新能源乘用车中,驱动电机是至关重要的组成部分之一。
不同的驱动电机类型和参数对于车辆性能和续航能力都有着重要的影响。
本文将深入探讨不同新能源乘用车的驱动电机类型和参数,帮助读者更全面地了解这一话题。
第二部分:驱动电机类型1. 交流驱动电机在众多新能源乘用车中,使用交流驱动电机的车型较为常见。
交流驱动电机具有响应速度快、输出扭矩大的特点,适合于提供优越的加速性能和动力输出。
然而,由于其结构复杂、成本较高,以及需要匹配的控制系统较为复杂,因此在应用中还存在一定的挑战。
2. 直流驱动电机相对于交流驱动电机,直流驱动电机在新能源乘用车中的应用相对较少。
然而,直流驱动电机由于结构简单、容易控制、维护成本低等优点,仍然在一些特定的车型中得到了应用。
尤其是在一些小型电动车和混动车中,直流驱动电机依然具有一定的市场份额。
3. 额外类型除了交流和直流驱动电机之外,还有一些新型驱动电机类型在新能源乘用车中得到了应用。
永磁同步电机、感应电机等,它们各自具有独特的特点和优势,在车辆性能和续航方面都有着重要作用。
第三部分:驱动电机参数1. 驱动电机功率驱动电机的功率直接关系到车辆的加速性能和动力输出。
通常情况下,功率更大的驱动电机可以带来更好的车辆性能。
但是,功率过大也可能导致车辆能耗增加,影响续航能力。
在选择驱动电机时需要权衡各方因素。
2. 最大扭矩最大扭矩是衡量驱动电机输出动力的重要参数之一。
与功率相比,最大扭矩更多地影响到了车辆的起步、爬坡和过弯性能。
在选择驱动电机时,需要根据车辆用途和需求来合理选择最大扭矩参数。
3. 效率驱动电机的效率直接关系到了能源利用的效果。
高效率的驱动电机可以在一定程度上提高车辆的续航能力,降低能源消耗。
在新能源乘用车中,选择高效率的驱动电机显得尤为重要。
第四部分:加入个人观点和理解在选择新能源乘用车时,驱动电机类型和参数是非常重要的考量因素。
新能源汽车电驱动技术研究与应用(电机电控部分)
新能源汽车电驱动技术研究与应用(电机电控部分)1 新能源汽车专有技术研究范围和内容新能源汽车是在传统汽车产业链基础上进行延伸,结构上与传统汽车的最大区别在于动力系统,增加了电池、电机、电控系统等组件。
基础部件材料研究:包括动力电池材料研究、单体电池、电池模块、电池系统以及结构轻量化材料。
汽车动力系统研究:包括电化学动力系统、高温电力电子研究和混合动力发动机系统研究,具体包括电机设计、逆变器和充电装置研究。
网联车辆信息研究:汽车电子方面、车辆智能化研究和交通网联研究。
电子控制与智能技术:包括电空调、电子制动、电子转向、智能安全辅助和智能驾驶以及智能制造(制造信息化与车身轻量化)。
新能源技术:包含低碳与可再生能源、氢电基础设施和能源互联网。
电机控制器(MCU):接收来自整车控制器的指令,将动力电池直流电流进行逆变控制,形成三项交流电进行电机转矩转速控制,并检测电机及控制器状态进行敀障诊断。
整车控制器(VCU):将驾驶员意图通过加速踏板信号转换为动力系统的需求信号,对整车能量进行管理,对各系统进行监控并及时反馈信息和报警等。
2 关于功率密度在功率密度方面,美国能源部的报告要求驱动系统(电机电控)的峰值功率密度在2020年达到5kw/L,2025年大幅提升到33kw/L,分解到电控是100kw/L,分解到驱动电机是50KW/L。
注:美国认为体积涉及到汽车的有效空间利用和乘客体验,从商业层面上讲,功率体积比的概念要比功率重量比更重要。
橡树岭实验室就在2017年开发出一款电机产品,这款电机是铁氧体永磁同步电机,转子采用双层SPOKE结构,经过测试这款峰值功率为103kw的电机,转矩密度比prius2010提高了10%,最高转速提高了20%。
如果以9000rpm 103kw的峰值工况工况计算,该电机功率密度达到10.3kw/L,成本降低到4.4$kw,其采用的核心创新点就是无稀土技术和自动优化算法。
橡树岭国家实验室(Oak Ridge National Laboratory)是美国能源部所属的一个大型国家实验室,成立于1943年,最初是作为美国曼哈顿计划的一部分,以生产和分离铀和钚为主要目的建造的,原称克林顿实验室。
纯电动汽车驱动系统选型及仿真研究

纯电动汽车驱动系统选型及仿真研究一、本文概述随着全球能源危机和环境问题的日益严重,纯电动汽车作为一种环保、节能的交通工具,正逐渐受到人们的青睐。
然而,纯电动汽车驱动系统的选型及其性能优化是一个复杂而关键的问题。
本文旨在深入研究纯电动汽车驱动系统的选型原则、影响因素及优化方法,并通过仿真分析验证所选驱动系统的性能表现。
文章将概述纯电动汽车驱动系统的发展历程和现状,分析不同驱动系统的优缺点及适用范围。
在此基础上,提出驱动系统选型的基本原则,包括动力性、经济性、可靠性和环保性等方面的要求。
文章将详细分析影响驱动系统选型的关键因素,如电池性能、电机类型、控制系统等。
通过对这些因素的综合考虑,建立起一套完整的驱动系统选型评价体系,为实际选型提供科学依据。
文章将利用仿真软件对所选驱动系统进行性能仿真分析。
通过模拟不同工况下的车辆行驶状态,评估驱动系统的动力性、经济性等指标,为驱动系统的优化改进提供数据支持。
本文的研究成果将为纯电动汽车驱动系统的选型及性能优化提供有力支持,为推动纯电动汽车的广泛应用和产业发展提供有益参考。
二、纯电动汽车驱动系统概述纯电动汽车(Battery Electric Vehicle,BEV)作为新能源汽车的一种,其驱动系统是其核心组成部分,直接影响到车辆的性能、效率和安全性。
纯电动汽车的驱动系统主要由电机、控制器、电池和传动机构等组成,其中电机作为动力源,负责将电能转化为机械能,驱动车辆行驶。
电机的选型是纯电动汽车驱动系统设计的关键。
目前,常用的电机类型主要包括直流电机、交流异步电机、交流同步电机和开关磁阻电机等。
其中,交流同步电机和开关磁阻电机因其高效率和宽调速范围等特点,在纯电动汽车领域得到了广泛应用。
同时,随着电机控制技术的发展,电机的控制策略也日趋成熟,如矢量控制、直接转矩控制等,为电机的优化运行提供了有力支持。
控制器作为驱动系统的“大脑”,负责接收车辆的各种信号,如加速踏板信号、制动踏板信号、车速信号等,并根据这些信号控制电机的运行状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 1 电机转矩 /功率特性
2. 1 峰值特性 汽车动力性由最高车速 uαmax、加速时间 t和
最大爬坡度 imax 3方面指标来评定 。因此 ,电机驱 动系统峰值特性参数可基于此计算 ,包括峰值转
上海汽车 200813
·5·
新能源汽车
矩 Tmax、峰值功率 Pmax及最高工作转速 nmax。
功率密度
2
效率
2
成本
4
可靠性
3
控制性
5
技术成熟度
5
安全性
4
总计
25
异步电机
3 3 5 5 4 5 5 30
永磁电机
5 5 3 4 5 4 3 29
开关磁 阻电机
3 3 4 5 3 3 5 26
2 电机驱动系统性能参数研究
与传统汽车相类似 ,为保证各种行驶工况需 要 ,满足汽车动力性要求 ,必须根据车辆动力性指 标来研究电机驱动系统性能参数 。按照电机工作 制 (温升 )的特点 ,电机驱动系统性能指标可分峰 值和持续特性 ;结合电机运行特性 ,再分为恒转矩 和恒功率运行区 ,如图 1所示 。其中 ,峰值特性用 于车辆加速 、爬坡 ,而持续特性用于车辆巡航行 驶。
温升不超过限值而达到热平衡的状态 ,对应于车
辆经常运行区域 。电机驱动系统持续特性通过持
续功率 Pe 与持续转矩 Te 来表征 ,有 :
Pe
=
(m gf
+ Cd A u2
/ 21.
15)
u
3600η
(5)
式中 ,车速 u 可按车辆最高设计车速的 90%
或我国高速公路最高限速 120 km / h 取值 。持续
图 3 电机峰值特性
4 结语
燃料电池汽车整车性能指标 、动力系统构型 确定之后 ,即可进行电机驱动系统的选型 ,进而从 峰值特性 、持续特性和制动特性来分析计算电机 驱动系统的性能参数 。另外 ,电机驱动系统作为
新能源汽车
图 4 加速曲线
一种零部件 ,其最终的选择也必须兼顾现有状况 , 尽量避免重新设计开发 。本文提出的方法具有一 定的工程实用价值 ,并可扩展至串联式混合动力 、 纯电动车用主驱动电机系统的选型和性能参数计 算。
收稿日期 : 2008 - 01 - 04
·4·
上海汽车 200813
新能源汽车
枢磁动势的严格正交 ,易于控制 ,采用斩波器即 可 。另外 ,电机结构复杂 ,其高速性能和可靠性受 换向器和电刷的影响较大 。随着交流调速理论及 电力电子器件的发展 ,目前在燃料电池汽车上的 应用已逐步减少 。 1. 2. 2 异步电机驱动系统
【主题词 】 燃料电池汽车 电机系统 研究
0 引言
随着汽车保有量的进一步增长 ,汽车尾气排 放已成为大气污染的主要源头 。另外 ,世界经济 的快速发展使能源危机日益严重 ,能源安全问题 也就成为各国所关注的重点 。面对环境污染 、能 源匮乏这两大难题 ,开发清洁无污染的电动汽车 无疑成为一条迫切 、有效的途径 。目前电动汽车 的发展可分为 3个方向 :混合动力 、纯电动以及燃 料电池 。燃料电池汽车以其高能量转换效率 、零 排放 、低噪声 、燃料可再生等优势 ,逐渐成为世界 各大汽车厂商研究和开发的热点 ,代表着未来汽 车的发展方向 。
行于第 ④象限 ,其对降低车辆能耗 、提高续驶里程
有着非常重要的意义 。因此 ,有必要就电机驱动
系统的制动特性进行分析 。
图 2 电机驱动系统运行模式
制动特性可采用最大制动功率 Pr 和最大制
动转矩 Tr 来表征 ,即 :
Pr = Pcηm
(7)
式中 , Pc 为动力蓄电池最大充电功率 , kW ;ηm
电机驱动系统是燃料电池汽车的心脏 ,由电 机及控制器组成 ,工作于车辆起动 、加速以及制动 等工况中 。作为整车唯一的动力装置 ,电机驱动 系统的开发关系到燃料电池汽车的动力性 、经济 性和可靠性 。本文从整车角度出发 ,介绍了燃料 电池汽车用电机驱动系统的选型标准 ,分析了其 性能参数对整车的影响 ,为整车动力系统集成设 计提供理论依据 。
转矩为 :
Te = 9550Pe / ne
(6)
2. 3 制动特性
图 2为电机驱动系统四象限运行 。其中 ,第 ①
象限对应于车辆前向驱动 ; 第 ②象限对应于车辆
溜坡时的过渡状态 ,通常很快进入第 ①象限 ;第 ③
象限对应于倒车 ; 第 ④象限对应于车辆前向行驶
过程中的回馈制动 。车辆正常行驶过程中经常运
通常可分为方波供电的无刷直流电机和正弦 波供电的永磁同步电机 。转子采用永磁体 ,不需 要励磁 。因此 ,功率因数大 ,电机具有较高的功率 密度和效率 。但受永磁材料性能的影响 ,目前仍 然存在成本高 、可靠性较低及使用寿命较短的缺 点 。另外 ,永磁电机控制器在发生故障而保护时 , 由于永磁体的原因电机会产生与转速成正比的反 电势并通过反向二极管加在高压母线两端 ,造成 潜在的安全问题 。与异步电机相比 ,永磁电机安 全性稍差 。目前日本汽车公司较多采用永磁电机 驱动系统 ,如本田推出的燃料电池汽车 FCX前轮 驱动电机为 80 kW 的永磁电机 。 1. 2. 4 开关磁阻电机驱动系统
下式计算 :
t
=
1 3. 6
∫uα 0
Ft
-
δm (m gf + Cd A u2 /21.
du 15)
(3)
式中 , t为加速时间 , s;δ为汽车旋转质量换算
系数 ; Cd 为空气阻力系数 ; A 为汽车迎风面积 , m2 ; u为车速 , km / h, (与电机转速 n 换算关系参见式
(1) ) ; Ft 为电机输出折算到车轮的牵引力 ,为 :
如表 1所示 ,异步电机及永磁电机得分较高 , 与世界范围内燃料电池汽车电机驱动系统的发展 趋势相一致 。由于空间布置以及功率需求的原
因 ,通常燃料电池客车较多采用异步电机驱动系 统 ,而燃料电池轿车较多采用永磁电机驱动系统 。
表 1 电机驱动系统综合性能评价
电机驱 动系统 直流电机 性能指标
表 2 动力性指标
最高车速 ( km / h) 最大爬坡度 ( % ) 加速时间 (0~100 km / h) ( s)
150
25
15
表 3 某电机驱动系统性能指标
峰值特性 持续特性 制动特性
Tmax (Nm ) 230 Te (Nm ) 100 Tr (Nm ) 230
Pmax ( kW ) 96 Pe ( kW ) 42 Pc ( kW ) 32
的情况 下 ,β越 大 , Pmax越 小 , 并 随 着 β的 增 大 , Pmax趋于饱和 。因此 ,β的 取值 对于 降低 电机 驱 动系统功率 需求 、减 小 电 机 驱 动 系 统 质 量 与 体
积 、提高整车效率有着非常重要的意义 。β的取
值取决于电机驱动系统类型及控制算法 ,通常取
2~4。β确定后 ,加速时间 (起步加速到 uα )可由
作为一种基于“磁阻最小原理 ”设计的新型电 机 ,定子 、转子均采用凸极结构 ,具有结构简单 、可 靠性高 、控制简便及功率 /转矩特性优越的特点 。 但存在噪声大 、转矩和母线电流脉动严重的缺陷 。 因此 ,在燃料电池汽车的应用较少 。 1. 3 电机驱动系统选型原则
燃料电池汽车电机驱动系统的选型必须结合 整车开发目标 ,综合考虑电机驱动系统的特点。 具体可参考表 1所示的电机驱动系统综合性能评 价指标 。
其折算后的峰值转矩 Tmaxα也可以满足汽车爬坡性
能指标要求 ,即 Tmaxα > Tmax g ,因此 ,电机峰值转矩
可设计为 Tmax = Tmaxα。如果车辆爬坡度有特殊设 计要求 ,则取 Tmax = Tmax g ,通过调整峰值功率和基 速比重新匹配 。
2. 2 持续特性
持续特性指电机驱动系统可以长时间运行 、
参考Байду номын сангаас献
1 杨国良. 电动车电机驱动控制技术的研究现状及其发展趋 势 [ J ]. 实验室研究与探索 , 2005 (11) 1
2 赵硕 ,张缓缓 ,王庆年. 混合动力汽车电机恒功率特性研究 [ J ]. 微电机 , 2005 ( 3) .
3 何洪文 ,余晓江 ,孙逢春等. 电动汽车电机驱动系统动力特 性分析 [ J ]. 中国电机工程学报 , 2006 (6).
电机最高工作转速由最高车速 uαmax和机械传
动系统减速比 i0 来确定 ,即 :
nm ax
=
60uα max ×i0 2πR ×3. 6
(1)
式中 , R 为车轮滚动半径 , m。
电机峰值转矩由最大爬坡度确定 ,汽车爬坡
时车速很低 ,可忽略空气阻力 。因此 ,有 :
Tmax g =ηRi0 (m gf co sαmax + m g sinαmax )
采用鼠笼式或绕线式转子结构 ,电机坚固耐 用 、结构简单 、技术成熟 、免维护 、成本低 ,尤其适 合恶劣的工作环境 。其缺点在于损耗大 、效率低 、 功率因数低 ,进而导致控制器容量增加 ,成本上 升 。美国制造的燃料电池汽车较为广泛地使用异 步电机系统 ,例如 GM 开发的燃料电池汽车 Sequel 采用了 60 kW 的异步电机 。 1. 2. 3 永磁电机驱动系统
新能源汽车
A版
燃料电池汽车用电机驱动系统选型及 性能参数研究
程 伟 欧阳启 张晓辉 (上海汽车集团股份有限公司技术中心 )
【摘要 】 从整车角度出发 ,综合分析了几种电机驱动系统的性能特点 ,介绍了燃料电池汽车用电机驱动
系统的选型原则 ,提出了从峰值 、持续和制动特性来描述电机驱动系统 ,为动力系统参数匹配计算提供依据 。仿 真结果表明 ,该方法可简便 、有效地完成燃料电池汽车用电机驱动系统设计 ,具有一定的工程实用价值 。