红外反射式传感器在智能循迹小车中的应用
智能小车红外寻迹检测技术的研究与应用
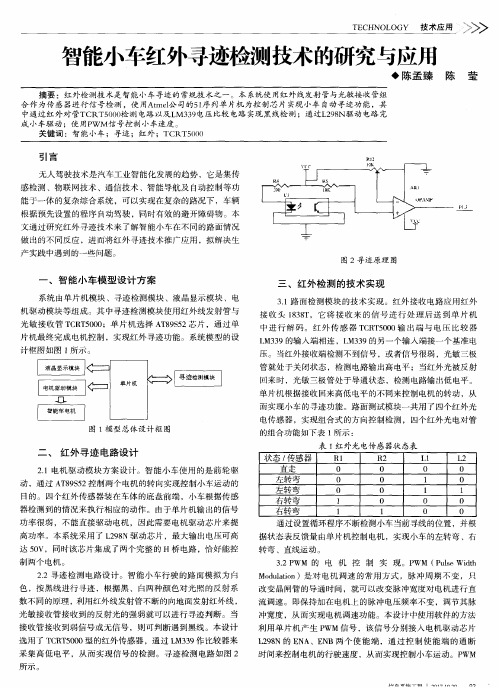
功 率很 弱 ,不能 直接 驱动 电机 ,因此 需要 电机 驱 动芯片 来提
高 功率 。本 系统采 用 了 L 2 9 8 N驱 动芯 片 ,最 大输 出 电压 可高 达5 0 V,同时该芯 片集 成 了两个完 整 的 H桥 电路 ,恰好 能控
制 两个 电机 。
通 过设置循 环程 序不 断检测 小车 当前 寻线 的位 置 ,并 根
采 集 高 低 电平 ,从 而实 现信 号 的检 测 。寻迹 检测 电路 如 图 2
陈
莹
窜1
引 言
无 人 驾驶技 术是 汽车 工业智 能化 发展 的趋 势 ,它 是集传
感 检测 、物 联 网技术 、通 信技 术 、智能 导航 及 自动控 制等 功
能于一 体 的复杂 综合 系统 ,可以实 现在 复杂 的路况 下 ,车辆
根据预 先设 置 的程 序 自动驾 驶 ,同时有 效 的避开 障 碍物 。本
2 . 2寻 迹检 测 电路 设 计 。智能 小 车行 驶 的路 面模 拟 为 白 色 ,按黑 线进 行 寻迹 ,根据 黑 、 白两 种颜 色对 光照 的反射 系 数不 同的原 理 ,利用 红外线 发射管 不断 的 向地 面发射红 外线 ,
改变 晶闸管 的导通 时 间 ,就可 以改变 脉 冲宽度对 电机 进行 直
二 、 红 外 寻 迹 电路 设 计
2 . 1电机 驱动 模 块方 案设 计 。智 能小 车 使用 的是前 轮驱
动 ,通 过 A T 8 9 S 5 2控 制两 个 ቤተ መጻሕፍቲ ባይዱ机 的转 向实现 控制 小车运 动 的
目的 。 四个 红外 传感 器装 在 车体 的底盘 前端 ,小 车根据 传感
器 检测 到 的情况 来执 行相 应 的动作 。 由于单 片机输 出的信号
智能小车循迹原理
智能小车循迹原理
智能小车循迹原理是通过使用感应器和控制算法来实现。
循迹感应器通常是由多个红外线传感器组成,这些传感器被安装在小车底部,并用于检测地面上的跟踪线。
这些红外线传感器能够发射和接收红外线信号。
当小车开始行驶时,红外线传感器会发射红外线信号,并迅速接收反射回来的信号。
如果传感器检测到白色地面,则意味着小车已偏离跟踪线。
根据传感器接收到的信号强度,算法会计算出小车偏离跟踪线的程度和方向。
接下来,控制算法会根据传感器的测量结果来调整小车的方向。
如果小车偏离跟踪线的程度较小,则只需进行轻微的调整,如微弱转向。
而如果偏离程度较大,则可能需要更大的转向角度来重新回到跟踪线上。
循迹算法可以通过PID控制器进行实现。
PID控制器通过使用
P(比例)、I(积分)和D(微分)三个参数来实现精确的控制。
比例参数用于根据偏离程度来计算所需的转向角度。
积分参数用于纠正持续的偏离,而微分参数用于平稳地调整转向角度变化的速率。
循迹原理的关键是通过连续地检测和调整来保持小车在跟踪线上运行。
这种感应器和控制算法的结合使得智能小车能够准确地遵循预定的路径,并在偏离时能够及时进行修正。
基于红外传感器的智能循迹小车设计

基于红外传感器的智能循迹小车设计随着科技的不断发展,人们对于智能化的需求也越来越高。
智能循迹小车是目前比较常见的一种智能化机器人,它能够按照指定的路线行驶,从而实现各种功能。
本文将会介绍一种基于红外传感器的智能循迹小车设计方案。
一、设计方案1、硬件方面首先,需要一个可以控制小车运动的主板,Arduino是比较常见的控制器,也是我们使用的控制器之一。
使用Arduino Uno控制器,主要是因为它具有足够的接口,可以进行多种传感器的连接,并且有很好的可编程性,能够满足我们对小车的需求。
同时,还需要使用两个电机来控制小车的行驶方向和速度。
可以选择直流电机,因为它们较为便宜、易于使用和控制。
此外,需要一个电池组来为小车提供电力。
还需要一些红外传感器,以便小车能够进行循迹行驶。
因为地面上的轨迹是黑色的,而其他部分是白色或灰色的,其反射红外线的能力不同,通过将传感器放在小车的底盘下方,当小车行驶在黑色的轨迹上时,可以及时接受反射回来的红外线,从而判断行走的方向。
在我们的设计方案中,我们将使用三个红外传感器来进行循迹行驶,其中两个用于控制小车左右方向的行驶,而另一个则是用于控制小车的前进或后退。
2、软件方面在软件编程方面,主要是通过控制器来进行程序的编写。
我们需要先定义好各个传感器的引脚,以及电机的引脚,然后根据传感器接收到的信号,控制电机的转速和方向,从而让小车沿着指定的路线行走。
当小车行驶到某个特定位置时,也可以添加一些其他的控制程序,比如使小车停下、发出提示音等等。
二、设计流程1、硬件搭建首先,需要将电机与Arduino板上的电机驱动器连接起来,并将电池组的两根电线连接到Arduino的电源管脚上,以为小车提供电力。
接着,需要将红外传感器接到Arduino上,这里需要注意的是,通常情况下,红外传感器会有三根引脚,其中一个是Vcc,一个是GND,还有一个是信号引脚。
Vcc和GND连接到Arduino的对应管脚,而信号引脚则要根据具体情况进行连接。
基于红外反射式传感器TCRT5000的循迹小车设计

Design of tracking car based on infrared reflective sensor TCRT5000
ZHU Chunhua,GU Xueliang
(School of Information Science and Engineering,Henan University of Technology,Zhengzhou 450001,China)
Imaging Method(61741107),National Natural Science Foundation of China for Youth:Research on Rateless Code Cooperative Transmission Method
Based on Dynamic Antenna Selection in Large⁃Scale MIMO System (61601170),Henan Science and Technology Department :Research on Radio
Abstract:A design scheme of the improved intelligent tracking car is proposed to improve both the stability and forward speed performance index of the tracking car. The infrared reflective sensor TCRT5000 is introduced to detect ground information. The motion speed of the car ′ left and right wheels is controlled by using the MCU internal program to control the double MOS drive and combining with PWM signals output by the MCU,so as to enable the car to run automatically along the guiding track, and greatly improve the stability and speed of the tracking car. The experimental results demonstrated the effectiveness of the proposed scheme.
TCRT5000红外反射式开关传感器寻黑白线循迹模块避障小车寻迹

TCRT5000红外反射式开关传感器寻黑白线循迹模块避障小车寻迹TCRT5000一体化光电传感器,具有抗干扰性强,使用方便等优点,是寻迹智能小车必备,检测距离10MM,多路可以适应多种黑线轨道,输入电压5V,黑线输出0V,白线输出5V,数字量输出,+:接直流DC5V正极-:接直流DC5V负极S:信号输出端,光敏三极管饱和,此时模块的输出端为高电平,指示二极管被点亮。
概述TCRT5000光电传感器模块是基于TCRT5000红外光电传感器设计的一款红外反射式光电开关。
传感器采用高发射功率红外光电二极管和高灵敏度光电晶体管组成,输出信号经施密特电路整形,稳定可靠。
应用场合:1.电度表脉冲数据采样2.传真机碎纸机纸张检测3.障碍检测4.黑白线检测基本参数:1.外形尺寸:长32mm~37 mm;宽7.5mm;厚2mm2.工作电压:DC 3V~5.5V,推荐工作电压为5V3.检测距离:1mm~8mm适用,焦点距离为2.5mm模块原理和应用电路原理图:图 1 TCRT5000传感器模块电路原理图传感器的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,光敏三极管一直处于关断状态,此时模块的输出端为低电平,指示二极管一直处于熄灭状态;被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,光敏三极管饱和,此时模块的输出端为高电平,指示二极管被点亮。
驱动芯片:L298N双H桥驱动芯片2.驱动部分端子供电范围Vs:+5V~+35V;如需要板内输出5V,则供电范围Vs:+7V~+35V3.驱动部分峰值电流Io:2A4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V)5.逻辑部分工作电流范围:0~36mA6.控制信号输入电压范围:低电平:-0.3V≤Vin≤1.5V高电平:2.3V≤Vin≤Vss7.最大功耗:20W(温度T=75℃时)8.存储温度:-25℃~+130℃9.驱动板尺寸:55mm*49mm*33mm(带固定铜柱和散热片高度)10.驱动板重量:33g11.其他扩展:控制方向指示灯、逻辑部分板内取电接口。
小车红外循迹模块原理和应用
通信1001 鞠亮
一.感应方案的选用 二.传感器的检测原理 三.电路的焊接 四.软件的设计
二.传感器的检测原理
图3.4 红外对管检测电路
寻线电路采用的是红外对管ST188(光电传感器), 光电传感器的前端面与被测物体的最佳检测距离为 8±1.5mm。 当检测的物体为黑色物体时,红外光管二极管U1发 射出的光线大部分被检测的黑色物体所吸收,反射 的光线已经很微弱,光敏三极管无法导通。所以 LM311的2脚为高电平,并且与3脚的输出电压同时 送入比较器LM311进行比较。由于U2>U3,使得 LM311的7脚电平输出为高,发光二极管不亮,最后 输出Vout为高。当被检测的物体为白色物体时,红 外光电二极管U1发射的光线会被白纸反射回来,这 时在红外线传感器的接收端会得到很强的光照,这 是光敏三极管就会导通。比较器LM311的2脚就会接 地,为低电平,与3脚的电压比较后再7脚的输出端 输出一个低电平。这时发光二极管就会形成回路, 发出红光,输出端Vout为低。将比较器的输出Vout 送入单片机中进行判断就可以判断出此时被检测的 轨迹是白色还是黑色的。
{
if(speed>=-100 && speed<=100)
{
if(index==1) //电机1的处理
{
m1=abs(speed); //取速度的绝对值
if(speed<0) //速度值为负则反转
{
s1=0;
s2=1;
}
else
//不为负数则正转
{
s1=1;
s2=0;
智能循迹小车实验报告
智能循迹小车实验报告一、实验目的本次实验旨在设计并实现一款能够自主循迹的智能小车,通过传感器检测路径信息,控制小车的运动方向,使其能够沿着预定的轨迹行驶。
通过本次实验,深入了解自动控制、传感器技术和单片机编程等方面的知识,提高实际动手能力和问题解决能力。
二、实验原理1、传感器检测本实验采用红外传感器来检测小车下方的黑线轨迹。
红外传感器由红外发射管和接收管组成,当发射管发出的红外线照射到黑色轨迹时,反射光较弱,接收管接收到的信号较弱;当照射到白色区域时,反射光较强,接收管接收到的信号较强。
通过比较接收管的信号强度,即可判断小车是否偏离轨迹。
2、控制算法根据传感器检测到的轨迹信息,采用 PID 控制算法(比例积分微分控制算法)来计算小车的转向控制量。
PID 算法通过对误差(即小车偏离轨迹的程度)进行比例、积分和微分运算,得到一个合适的控制输出,使小车能够快速、准确地回到轨迹上。
3、电机驱动小车的动力由直流电机提供,通过电机驱动芯片(如 L298N)来控制电机的正反转和转速。
根据控制算法计算出的转向控制量,调整左右电机的转速,实现小车的转向和前进。
三、实验器材1、硬件部分单片机开发板(如 STM32 系列)红外传感器模块直流电机及驱动模块电源模块小车底盘及车轮杜邦线、面包板等2、软件部分Keil 等单片机编程软件串口调试助手四、实验步骤1、硬件搭建将红外传感器模块安装在小车底盘下方,使其能够检测到黑线轨迹。
将直流电机与驱动模块连接,并安装在小车底盘上。
将单片机开发板、传感器模块、驱动模块和电源模块通过杜邦线连接起来,搭建好实验电路。
2、软件编程使用单片机编程软件,编写传感器检测程序、控制算法程序和电机驱动程序。
通过串口调试助手,将编写好的程序下载到单片机开发板中。
3、调试与优化启动小车,观察其在轨迹上的行驶情况。
根据小车的实际行驶情况,调整 PID 控制算法的参数,优化小车的循迹性能。
不断测试和改进,直到小车能够稳定、准确地沿着轨迹行驶。
红外自动循迹小车实验报告

摘要本实验完成采用红外反射式传感器的自寻迹小车的设计与实现。
采用与白色地面色差很大的黑色路线引导小车按照既定路线前进,在意外偏离引导线的情况下自动回位,并能显示小车停止的时间。
本设计采用单片机STC89C51作为小车检测、控制、时间显示核心,以实验室给定的车架为车体,两直流机为主驱动,附加相应的电源电路下载电路,显示电路构成整体电路。
自动寻迹的功能采用红外对管LTH1550实现,信号经三极管9012放大,经LM339电压比较器比较之后将信号送给单片机,由单片机通过控制驱动芯片L298N驱动电动小车的电机,实现小车的动作。
同时还可以将小车的停留时间通过四位数码管显示。
关键词:STC89C51单片机;红外对管LTH1550;红外传感器;寻迹一、系统设计任务与要求小车从上坡处开始行驶,到达坡顶停留5秒,由数码管显示停留时间,然后继续行驶,到达坡底开始沿黑线行驶,直到终点宽黑线停止。
二、方案分析与论证总体方案设计:根据题目,我们设计了以下方案并进行了综合的比较论证,自动寻迹电动小车系统由小车主体部分、微控制器模块、寻迹传感器模块、电机驱动模块、显示模块、电源模块构成。
2.1 总体方案论证与比较方案一:采用数字电路来组成小车的各部分系统,实现各部分功能。
本方案电路复杂,灵活性不高,效率低,不利于小车智能化的扩展,设计困难。
方案二:采用单片机来作为整机的控制单元。
黑线检测采用红外对管对光源信号进行采集,再经过三极管放大,电压比较使输出转化为数字信号送到单片机系统处理。
此系统比较灵活,采用软件方法来解决复杂的硬件电路部分,使系统硬件简洁化,各类功能易于实现,能很好地满足题目的要求。
方案二简洁、灵活、可扩展性好,能达到题目的设计要求,因此采用方案二来实现。
方案二的基本结构图如下:图1总体系统结构框图2.2 寻迹检测方案的选择方案一:采用CCD传感器。
利用CCD传感器进行自动导航的机器人已得到初步应用。
但CCD传感器价格较高,体积较大,数据处理复杂,不适合本次实验使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
红外反射式传感器在智能循迹小车中的应用
在电子设计大赛培训中,我们设计制作了一款智能寻迹小车,基本要求是让小车能沿着既定的路线行驶,比如在地板上随便画一条黑线,小车就能沿黑线行驶。
这里的循迹模块采用的是反射式红外对管ST178H。
ST178H传感器的工作原理与一般的红外传感器一样,一传一感。
ST178H具有一个高发射功率红外发光二极管和一个高灵敏度红外接收管。
当发射管的红外信号经反射被接收管接收后,接收管的电阻会发生变化,在电路上一般以电压的变化形式体现出来,而经过ADC转换或LM393等电路整形后得到处理后的输出结果。
电阻的变化取决于接收管所接收的红外信号强度,常表现在反射面的颜色和反射面接收管的距离两方面.硬件电路原理图如下:
通过调节滑动变阻器R4可以调节红外对管的灵敏度,当红外对管检测到白线或黑线却不能送出信号时,可以调节R4来增大其灵敏度。
1、红外对管寻迹:
当小车在白色地面行驶时,装在车下的红外发射管发射红外线信号,经白色反射后,被接收管接收,一旦接收管接收到信号,输出端将输出低电平;当小车行驶到黑线时,红外线信号被黑色吸收后,将输出高电平,从而实现了通过红线检测信号的功能。
将检测到的信号送到单片机的I/O 口,当I/O 口检测到的信号为高电平时,表明小车处在黑色的引线上;同理,当I/O 口检测到的信号为低电平时,表明小车行驶在白色地面上。
寻迹模块用了三路采样,中间一个控制轨迹,两侧的用于检测道路的分支、弯道、交叉口等,布置如下:
行驶原理:若红外对管2检测到黑线,小车直走;若只
有红外管1检测到黑线,小车左拐;若只有红外管3检测到
黑线,小车右拐;若三个管都没有检测到黑线,小车保持原
来的状态行驶。
当黑线在红外对管下,会给单片机一个高
电平。
2、红外对管测速测距:
在两个车轮上分别粘贴一小片白纸,在能检测到白纸的位置分别放置一红外
对管,车轮在转动时,红外对管检测到白纸输出低电平,单片机计数一次,结合小车轮子的直径和小车行驶的时间就可以计算出小车行驶的速度和路程。
并用液晶显示出来。
在寻迹上,对红外对管个数的选择以及摆放,我们经过了周密考虑。
如果在车底盘多用几个传感器,小车的寻迹灵敏度更高,小车也行驶更平稳。