基于红外反射循迹小车的传感器布局研究
基于红外反射式光电传感器阵列的智能循迹车设计
0 引 言
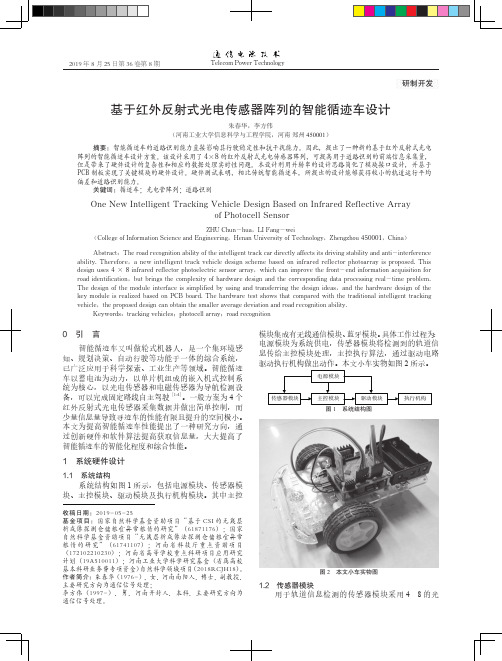
智能循迹车又叫做轮式机器人,是一个集环境感 知、规划决策、自动行驶等功能于一体的综合系统, 已广泛应用于科学探索、工业生产等领域。智能循迹 车以蓄电池为动力,以单片机组成的嵌入机式控制系 统为核心,以光电传感器和电磁传感器为导航检测设 备,可以完成固定路线自主驾驶 [1-4]。一般方案为 4 个 红外反射式光电传感器采集数据并做出简单控制,而 少量信息量导致寻迹车的性能有限且提升的空间极小。 本文为提高智能循迹车性能提出了一种研究方向,通 过创新硬件和软件算法提高获取信息量,大大提高了 智能循迹车的智模块
主控 模块
驱动 模块
图 1 系统结构图
执行 机构
收稿日期:2019-05-25 基金项目:国家自然科学基金资助项目“基于 CSI 的无线层 析成像探测仓储粮食异常粮情的研究”(61871176);国家 自然科学基金资助项目“无线层析成像法探测仓储粮食异常 粮 情 的 研 究”(61741107); 河 南 省 科 技 厅 重 点 资 助 项 目 (172102210230);河南省高等学校重点科研项目应用研究 计划(19A510011);河南工业大学科学研究基金(省属高校 基 本 科 研 业 务 费 专 项 资 金 )自 然 科 学 领 域 项 目( 2 0 1 8 R C J H 1 8 )。 作 者 简 介:朱 春 华( 1 9 7 6 - ),女 ,河 南 南 阳 人 ,博 士 ,副 教 授 , 主要研究方向为通信信号处理; 李方伟(1997-),男,河南开封人,本科,主要研究方向为 通信信号处理。
2019 年 8 月 25 日第 36 卷第 8 期
基于红外传感器的自动寻迹智能小车设计
毕业设计(论文)基于红外传感器的自动寻迹智能小车设计系别专业班级学号姓名指导教师基于红外传感器的自动寻迹智能小车设计摘要介绍了一种自动寻迹智能车的设计,研究了采用红外反射式光电传感器作为路径采集模块实现自动寻迹的软硬件设计方法。
系统采用Freescale 16位单片机MC9S12DG128为核心控制器,利用12个红外光电传感器构成的光电传感器阵列采集路面信息,单片机获得传感器采集的路面信息和车速信息,经过分析后控制智能车的舵机转向,同时对直流电机进行调速,从而实现智能车沿给定的黑线快速平稳地行驶。
介绍了光电传感器的寻迹原理,讨论了光电传感器排列方法、布局等对寻迹结果的影响及速度和转向控制的PID算法的研究和参数整定。
关键字:光电传感器,寻迹,路径识别,PWM,PIDDesign of autonomous tracing smart car based on infrared sensorsAuthor:Xue ChangliangTutor:Gu DeyingAbstractA design of autonomous tracing system in intelligent vehicle is introduced. The software and hardware design method which realizes the autonomous tracing using the infrared Reflective photoelectric sensors as the path recognition module is researched. The system employs Freescale HCS series 16 bit single-chip microcomputer MC9SDG128 as its main controller and an array of photoelectric sensors for recognizing the path information. Single-chip Microcomputer energizes the PWM signal to steer and control the speed of the DC electric motor according to the analysis of the path and speed information from sensors. Consequently, this intelligent vehicle can track the black-guide-line automatically and move forward following the line quickly and smoothly. The autonomous tracing principle of photoelectric sensor is presented. The effects of sensor s’ array method, overall arrangement on the autonomous trace are discussed. And the use of PID algorithm in speed and steering control.Key words : photoelectric sensor ,autonomous tracing, path recognition, PWM,PID目录第1章绪论 (1)1.1 课题的研究背景 (1)1.2 国内外智能车的研究现状 (1)1.3 本文内容及结构安排 (3)第2章红外传感器的寻迹原理及布局对寻迹的影响 (4)2.1红外传感器寻迹原理 (4)2.2传感器布局对路径识别的影响 (6)2.2.1布局相关参数 (6)2.2.2一字型与八字型布局研究 (6)第3章智能车机械结构的调整 (9)3.1 赛车参数 (9)3.2舵机安装方式调整 (10)3.3 前轮定位 (10)3.3.1主销后倾角 (10)3.3.2主销内倾角 (11)3.3.3 前轮外倾角 (12)3.3.4前轮前束 (13)3.4重心位置 (13)3.5 齿轮传动间距调整 (14)3.6后轮差速机构调整 (14)第4章系统硬件设计 (15)4.1 S12控制核心 (16)4.2电源管理模块 (17)4.2.1 单片机稳压电源电路设计 (17)4.2.2 舵机电源模块设计 (19)4.3 电机驱动模块 (20)4.4速度检测模块 (23)4.5 路径识别模块 (25)第5章系统软件设计 (27)5.1 系统的模块化结构 (28)5.1.1 时钟初始化 (28)5.1.2 串口初始化 (28)5.1.3 AD初始化 (29)5.1.4 PWM初始化 (30)5.2 路径信息处理 (32)5.3 数字滤波算法 (33)5.4 小车控制算法 (35)5.4.1 PID算法 (37)5.4.2 舵机控制 (39)5.4.3 电机控制 (39)第6章系统调试 (40)6.1 开发调试工具 (40)6.2 无线调试模块 (42)6.3拨码开关调试 (42)6.4 试验结果分析 (42)结论 (44)致谢 (45)参考文献 (46)附录 (47)附录A 硬件原理图 (47)附录B程序源代码 (49)附录C Sorting out PID controller differences (69)第1章绪论1.1 课题的研究背景汽车工业发展已有100多年的历史。
基于红外传感器的智能循迹小车设计

基于红外传感器的智能循迹小车设计随着科技的不断发展,人们对于智能化的需求也越来越高。
智能循迹小车是目前比较常见的一种智能化机器人,它能够按照指定的路线行驶,从而实现各种功能。
本文将会介绍一种基于红外传感器的智能循迹小车设计方案。
一、设计方案1、硬件方面首先,需要一个可以控制小车运动的主板,Arduino是比较常见的控制器,也是我们使用的控制器之一。
使用Arduino Uno控制器,主要是因为它具有足够的接口,可以进行多种传感器的连接,并且有很好的可编程性,能够满足我们对小车的需求。
同时,还需要使用两个电机来控制小车的行驶方向和速度。
可以选择直流电机,因为它们较为便宜、易于使用和控制。
此外,需要一个电池组来为小车提供电力。
还需要一些红外传感器,以便小车能够进行循迹行驶。
因为地面上的轨迹是黑色的,而其他部分是白色或灰色的,其反射红外线的能力不同,通过将传感器放在小车的底盘下方,当小车行驶在黑色的轨迹上时,可以及时接受反射回来的红外线,从而判断行走的方向。
在我们的设计方案中,我们将使用三个红外传感器来进行循迹行驶,其中两个用于控制小车左右方向的行驶,而另一个则是用于控制小车的前进或后退。
2、软件方面在软件编程方面,主要是通过控制器来进行程序的编写。
我们需要先定义好各个传感器的引脚,以及电机的引脚,然后根据传感器接收到的信号,控制电机的转速和方向,从而让小车沿着指定的路线行走。
当小车行驶到某个特定位置时,也可以添加一些其他的控制程序,比如使小车停下、发出提示音等等。
二、设计流程1、硬件搭建首先,需要将电机与Arduino板上的电机驱动器连接起来,并将电池组的两根电线连接到Arduino的电源管脚上,以为小车提供电力。
接着,需要将红外传感器接到Arduino上,这里需要注意的是,通常情况下,红外传感器会有三根引脚,其中一个是Vcc,一个是GND,还有一个是信号引脚。
Vcc和GND连接到Arduino的对应管脚,而信号引脚则要根据具体情况进行连接。
基于红外反射式传感器TCRT5000的循迹小车设计

Design of tracking car based on infrared reflective sensor TCRT5000
ZHU Chunhua,GU Xueliang
(School of Information Science and Engineering,Henan University of Technology,Zhengzhou 450001,China)
Imaging Method(61741107),National Natural Science Foundation of China for Youth:Research on Rateless Code Cooperative Transmission Method
Based on Dynamic Antenna Selection in Large⁃Scale MIMO System (61601170),Henan Science and Technology Department :Research on Radio
Abstract:A design scheme of the improved intelligent tracking car is proposed to improve both the stability and forward speed performance index of the tracking car. The infrared reflective sensor TCRT5000 is introduced to detect ground information. The motion speed of the car ′ left and right wheels is controlled by using the MCU internal program to control the double MOS drive and combining with PWM signals output by the MCU,so as to enable the car to run automatically along the guiding track, and greatly improve the stability and speed of the tracking car. The experimental results demonstrated the effectiveness of the proposed scheme.
基于红外线传感器的智能寻迹小车设计
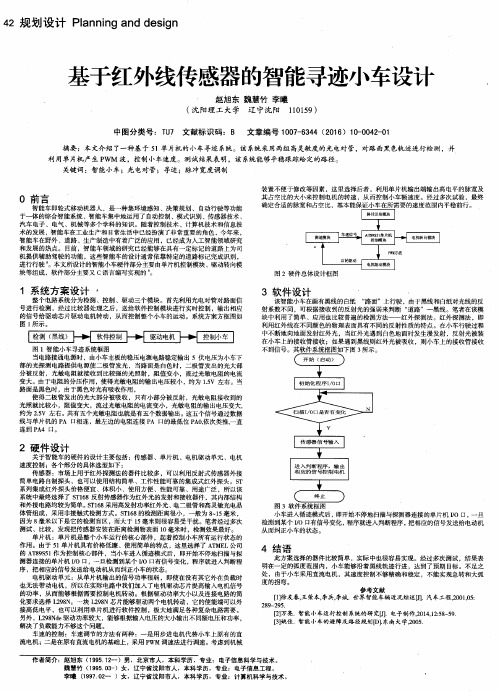
图 2硬件 总体设计框 图
1系统 方案设计 ・
整个电路系统分为检测 、控制 、驱动三个模块 。首先利用光 电对 管对路 面信 号进行检测 ,经过 比较器 处理之后 ,送给软件控制模块进行实 时控制 ,输出相应 的信号给驱动芯 片驱动 电机转动 ,从而控制整个小车 的运动 。系统方案方框图如 图1 所示 。
3 软件 设计
’
检测 ( 黑线) 卜- — . {软件控制 卜 . - ■ 驱动电机 - ■ . {控制小车
图 1智 能小车寻迹 系统 框图 当电路接通电源时 ,由小车主板的稳压电源电路稳 定输 出 5伏电压为小车下 部的光探测 电路提供 电源使 二极管发光 ,当路面是 白色 时,二极 管发出的光大部 分被反射 ,光敏 电阻就接 收到比较强的光照射 ,阻值变小 ,流过 光敏电阻的电流 变大。由于 电阻 的分压作用 ,使得光敏电阻的输出电压较小 , 约为 1 . 5 v 左右 。当 路面是黑色时 ,由于黑色对光有吸收作用 , 使得二极管发 出的光 大部 分被吸收 ,只有小部分被反射 ,光敏 电阻接 收到的 光照就比较小 ,阻值变大 ,流过光敏 电阻 的电流变小 ,光敏电阻 的输 出电压变大, 约为 2 . 5 V 左右 。 共有五个光敏 电阻也就是有五个数据输出。这五个信号通过数据 线与单片机的 P A 1 3 相连, 最左边的 电阻连接 P A 3的最低位 P 1 A O , 依次类推, 一直 连到 P A 4 口。
摘要 :本 文介 绍了一种基 于 5 l 单片机的小车寻迹 系统。该 系统采用两组高灵敏度 的光 电对管 ,对路面黑 色轨迹进行检 测,并 利 用单 片机产 生 P WM 波 ,控制 小车速度 。测试 结果表 明,该 系统能够平稳跟踪给定的路 径。 关键词 :智能小车;光 电对 管;寻迹 ;脉冲 宽度调制
红外自动循迹小车实验报告

摘要本实验完成采用红外反射式传感器的自寻迹小车的设计与实现。
采用与白色地面色差很大的黑色路线引导小车按照既定路线前进,在意外偏离引导线的情况下自动回位,并能显示小车停止的时间。
本设计采用单片机STC89C51作为小车检测、控制、时间显示核心,以实验室给定的车架为车体,两直流机为主驱动,附加相应的电源电路下载电路,显示电路构成整体电路。
自动寻迹的功能采用红外对管LTH1550实现,信号经三极管9012放大,经LM339电压比较器比较之后将信号送给单片机,由单片机通过控制驱动芯片L298N驱动电动小车的电机,实现小车的动作。
同时还可以将小车的停留时间通过四位数码管显示。
关键词:STC89C51单片机;红外对管LTH1550;红外传感器;寻迹一、系统设计任务与要求小车从上坡处开始行驶,到达坡顶停留5秒,由数码管显示停留时间,然后继续行驶,到达坡底开始沿黑线行驶,直到终点宽黑线停止。
二、方案分析与论证总体方案设计:根据题目,我们设计了以下方案并进行了综合的比较论证,自动寻迹电动小车系统由小车主体部分、微控制器模块、寻迹传感器模块、电机驱动模块、显示模块、电源模块构成。
2.1 总体方案论证与比较方案一:采用数字电路来组成小车的各部分系统,实现各部分功能。
本方案电路复杂,灵活性不高,效率低,不利于小车智能化的扩展,设计困难。
方案二:采用单片机来作为整机的控制单元。
黑线检测采用红外对管对光源信号进行采集,再经过三极管放大,电压比较使输出转化为数字信号送到单片机系统处理。
此系统比较灵活,采用软件方法来解决复杂的硬件电路部分,使系统硬件简洁化,各类功能易于实现,能很好地满足题目的要求。
方案二简洁、灵活、可扩展性好,能达到题目的设计要求,因此采用方案二来实现。
方案二的基本结构图如下:图1总体系统结构框图2.2 寻迹检测方案的选择方案一:采用CCD传感器。
利用CCD传感器进行自动导航的机器人已得到初步应用。
但CCD传感器价格较高,体积较大,数据处理复杂,不适合本次实验使用。
电动循迹小车实验报告
一、实验目的本次实验旨在设计和实现一款基于电动驱动的循迹小车,通过红外传感器检测地面上的黑线,实现对小车行进路径的自动控制。
通过本次实验,掌握以下技能:1. 红外传感器的原理和应用;2. 单片机的编程和驱动控制;3. 电动小车的组装与调试;4. 掌握电路设计和调试方法。
二、实验原理1. 红外传感器原理:红外传感器通过发射红外线并接收反射回来的红外线来检测物体的存在。
当红外线照射到黑色路线上时,反射回来的红外线强度减弱,传感器检测到变化后,将信号传输给单片机。
2. 单片机控制原理:单片机接收到红外传感器的信号后,根据预设的程序控制小车的前进、后退、转弯等动作。
3. 电机驱动原理:电机驱动电路将单片机的控制信号转换为电机所需的电流,驱动电机旋转,从而实现小车的运动。
三、实验器材1. 电动小车底盘;2. 红外传感器模块;3. 单片机(如Arduino);4. 电机驱动模块(如L298N);5. 电池;6. 连接线;7. 电阻、电容等电子元件;8. 黑色纸带。
四、实验步骤1. 组装电路:将红外传感器模块、单片机、电机驱动模块、电池等元件按照电路图连接起来。
2. 编写程序:根据实验要求,编写单片机的控制程序。
程序主要包括以下功能:- 红外传感器数据采集;- 小车运动控制(前进、后退、转弯);- 电机驱动控制。
3. 调试程序:将编写好的程序烧录到单片机中,连接电池,观察小车是否能够按照预期路径行进。
4. 调整传感器位置:根据红外传感器的实际工作情况,调整传感器位置,确保传感器能够准确检测到地面上的黑线。
5. 调整电机速度:通过调整电机驱动模块的PWM信号,调整电机的转速,使小车运动平稳。
6. 优化程序:根据实验结果,对程序进行优化,提高小车的循迹精度和稳定性。
五、实验结果与分析1. 实验结果:经过调试,小车能够按照地面上的黑线行进,实现自动循迹。
2. 分析:- 红外传感器对光线敏感,容易受到环境光线干扰。
在光线较强或较弱的环境中,需要对传感器进行调整,以确保其正常工作。
基于红外光电传感器的智能车自动寻迹系统设计

基于红外光电传感器的智能车自动寻迹系统设计一、本文概述随着科技的飞速发展,智能化、自动化的技术在各个领域得到了广泛的应用。
在智能交通系统中,智能车自动寻迹系统以其高效、准确的特点,受到了广泛的关注。
本文旨在探讨基于红外光电传感器的智能车自动寻迹系统的设计,以期能为智能交通系统的发展提供有益的参考。
本文将详细介绍红外光电传感器的工作原理及其在智能车自动寻迹系统中的应用。
红外光电传感器作为一种非接触式的测量工具,具有灵敏度高、响应速度快、抗干扰能力强等优点,因此在智能车自动寻迹系统中具有广泛的应用前景。
本文将深入探讨智能车自动寻迹系统的总体设计方案。
包括系统的硬件设计,如红外光电传感器的选型、电路设计、微处理器的选择等,以及软件设计,如路径识别算法、运动控制算法等。
通过对这些关键技术的详细分析,以期能为实际系统的设计提供有益的参考。
本文将通过实例分析,验证所设计的智能车自动寻迹系统的性能。
通过在不同环境下进行实际测试,收集并分析系统的寻迹精度、速度、稳定性等数据,从而评估系统的性能,并提出改进意见。
本文旨在对基于红外光电传感器的智能车自动寻迹系统进行全面、深入的研究,以期能为智能交通系统的发展提供有益的参考。
二、红外光电传感器原理及特性红外光电传感器是一种利用红外线进行非接触式测量的传感器,其基本原理是基于光电效应和红外辐射的特性。
红外光电传感器内部包含一个发射器和一个接收器,发射器发射出特定波长的红外线,当这些红外线遇到物体后,部分会被反射回接收器。
根据物体对红外线的反射程度,接收器可以感知到物体的存在及其与传感器的距离。
红外光电传感器具有多种特性,使其特别适用于智能车自动寻迹系统。
红外光对许多物体的穿透能力较弱,因此传感器能够精确地感知物体表面的细节,这对于智能车寻迹系统中的路径识别非常关键。
红外光电传感器对环境光线的变化不敏感,即使在日光下也能正常工作,这使得系统在各种光线条件下都能保持稳定的性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2008(2)
[4]朱 益 斌 ,等.自 主 式 循 迹 机 器 人 小 车 的 设 计 [J].国 外 电 子 测 量 技 术 ,
2006(7)
[收 稿 日 期 :2009.6.4 ]
图3 方案三:活动型布局 活动型布局采用矩阵模式,将传感器排布成矩阵形状,通过 对不同位置传感器采集到信息的选择来适应各种不同的跑道。 这样对不同路况有更强的适应性。 此种方案可调性大,但此种方 法需要较多传感器,冗余较大,比较笨重,增加小车的重量,不利 于车的加减速。 方案四:用方案一与方案二的结合,这种排布可以综合方案 一与方案二的优点,扬长避短,优势互补,电路简单,易于实现。
图1 采用 ST168 发射级电阻根据 具 体 管 子 不 同 而 略 有 差 异 ,考 虑 到 安 装 位 置 为 小 车 前 端 距 地 面 1~2cm 处 , 综 合 灵 敏 度 等 方 面,选取电阻在 500Ω~1kΩ 之间。 比较电路采用 LM311,分压电 阻 采 用 两 个 1k 欧 电 路 提 供 比 较 电 平 。 上 拉 电 阻 采 用 几 百 欧 即 可。 考虑输出电平直接接而单片机 IO 口最高电平为 5V,故采用 5V 电源供电。 2 传感器分布方案 传感器通过信号采集,向 MCU 提 供 信 息 ,所 以 合 理 的 传 感 器布局能使在相同传感器下,获取的信息量最大。 尤其在快速行 进的小车中, 通常传感器布局需要考虑信息检测的准确度和信 息检测的前瞻性。 目前许多小车控制传感器的布局采用等间隔 的一字排布,非常不科学,传感器的科学布局一般有以下几种: 方案一:一字型布局 一字型布局即所有传感器在同一直线上。 一字型布局又分为 均匀排布型与非均匀排布型。 均匀排布型不利于对弯道信号采集 的准确性。 考虑到弧度信息采集的连贯性,非均匀排布择采用等 角原则,即在直线垂直上方处某点等角的引射线与直线的交点即 传感器的分布点,此种方法检测连贯简单,程序控制算法简单,使 小车控制稳定。 如图 2 为非均匀对称分布,按等角原则的分布图。 方案二:M 型布局 M 型布局即传感器的布局成 M 型,M 型更适合在快速弯道
1 循迹小车红外反射循迹原理 基于红外反射式循迹原理: 红外反射式传感器由两部分组
成,一部分为红外发射部分,另一部分为红外接收部分。 有效距 离通常控制在 3cm 以内。 通过地面白黑对红外线的反射效果不 同而检测地面状况输出变化电平, 当检测到地面黑线时红外线 被吸收,输出高电平。 为了便于单片机处理,可在后续加入一电 压比较器,同时可以通过调整 R2 与 R3 来调整红外对管的检测 灵敏度。 原理图如图 1。
参考文献
[1]王超艺,等.基于红外传感器的自动寻机小车控制系统的设计 [J].电
子 工 程 师 ,2008 (11 )
[2]王 晶 ,翁 显 耀 ,梁 业 宗.自 动 寻 机 小 车 的 传 感 器 模 块 设 计 [J].现 代 电
子 技 术 ,2008 (22 )
[3] 程 星 晶 , 等 . 轮 式 机 器 人 循 迹 使 用 传 感 器 研 究 [J]. 现 代 商 贸 工 业 ,
图2 时对弯道的检测。 由于传感器不在同一直线上,故转弯的时候边 侧后部的传感器有较大的采样空间, 内部前端的传感器则对信 号采集有更好的前瞻性 ,M 型中间底部的传感器择 更 好 的 确 定 小车的位置。整个布局有利于在弯道处提高小车速度。但相对一 字型布局,M 型布局容易产生不稳定信号采集,从而产生信号震 荡,影响小车行驶的稳定性。
《工业控制计算机》2009 年 22 卷第 8 期
97
ቤተ መጻሕፍቲ ባይዱ
基于红外反射循迹小车的传感器布局研究
宫纪波 (山东大学信息学院,山东 济南 250001)
摘要 在自动控制的小车设计与应用中,循迹是小车完成各项功能所依靠最基本的功能,在目前的电子竞赛,实际应用中都有 很广泛的应用。 主要针对目前基于红外对管反射式循迹技术小车的传感器布局进行相应研究总结。 关键词:循迹,小车,传感器,布局