SPWM变压变频调速控制系统设计
基于SPWM控制的交流电动机变频调速技术
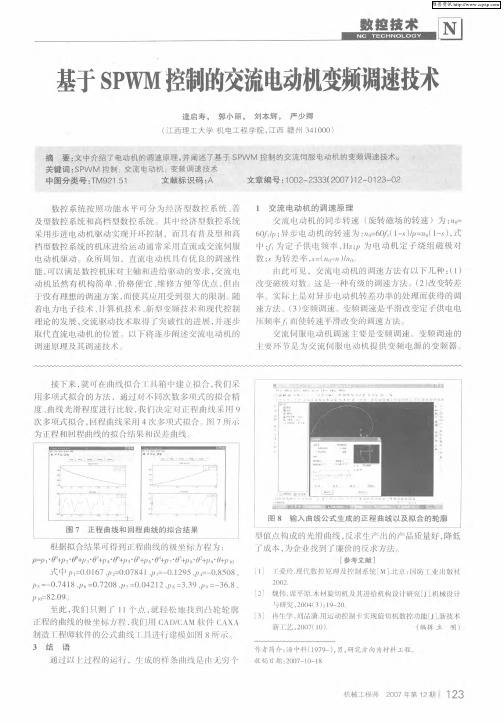
角波 u= 与正弦波 u正 , 角 弦 并送人 电压 比较器 , 出即为 输
S WM 调 制波 。 P
采 用 模 拟 电路 的优 点 是 完 成 三 角 波 与 正 弦 波 的 比 电路 所 用 的硬 件 较 多 , 改变 参 数 和调 试 比较 困难 。 除 了
流电压, 再送 人 由大功 率 晶体 管 构成 的逆 变器 主 电路 , 输 较 并 确 定 脉 冲宽 度 的 时 间很 短 , 乎 瞬 间完 成 。缺 点 是 几
(P s wM波 )去驱动交流伺服电动机运转。 ,
( ) 弦波 与等 效 的 S WM波 1正 P
S W M 波 由 P
采 用这种方法外还可 以通过专用 的集成 电路芯 片或者 已知正弦波的幅值 、频 率和相位 ,由计 算机计算产 生
S WM 波 。 P
3 P M 变 频调 速 系统 S W
维普资讯
维普资讯
圜 数 技 控术
下面 将介 绍 正弦 波脉 宽调 制 变频 器 。
2 正 弦波脉 宽 调制 ( P M ) Sw 变频 器
机 在 变 频 的 同 时 , 相 应 改 变 电 压 , 而 达 到 变 频 与变 也 从 压 的 同步 进 行 。 图 2 b 中 由模 拟 电 路 分 别 产 生 等 腰 三 ()
S WM变频器 , P 即正弦波 P WM变频 器 , 于交一 一 属 直 交 静 止变 频 装置 。 它先 将 5 H 的工 频 电源经 整流 变 压 器变 0z 到所需 的电压 后 , 经二 极 管整 流 和 电容 滤 波 , 成 恒定 直 形 出三相 频 率 和 电压均 可 调 的等 效 于正 弦 波 的脉 宽调 制 波
作者 简介 : 逢启寿 (9 3 , 副教授 , 16 一) 男, 主要从事 C C数控研 究。 N
一种高速电机SPWM变频调速系统
一种高速电机SPWM变频调速系统
张宏宇;王哈力
【期刊名称】《哈尔滨电工学院学报》
【年(卷),期】1994(017)001
【摘要】文中简介了一种高速电机变频调速系统的组成及PWM调制原理,并介
绍SLE4520专用芯片、功率开关元件IGBT及其驱动电路,同时也对所研制变频器中各种保护电路进行了分析,最后给出了实验结果及与其它变频器的比较。
【总页数】7页(P23-29)
【作者】张宏宇;王哈力
【作者单位】不详;不详
【正文语种】中文
【中图分类】TM301.2
【相关文献】
1.一种SPWM变频调速系统设计 [J], 李健铎;丁召
2.基于MC9S12H256实现的闭环SPWM异步电机变频调速系统 [J], 杨泽斌
3.三相交流电机SPWM变频调速系统设计与仿真 [J], 庞丽坤;吴钦木
4.三相交流电机SPWM变频调速系统设计与仿真 [J], 庞丽坤; 吴钦木
5.基于DSP的交流异步电机SPWM变频调速系统设计 [J], 宋店波;王永生
因版权原因,仅展示原文概要,查看原文内容请购买。
实验二 正弦脉宽调制(SPWM)变频调速实验
机电运动控制系统 机电运动控制系统 直流电动机的控制 SPWM变频调速
SPWM变频调速实验
4、实验内容
* 运行频率f1=5Hz,比较研究 ① 载波频率f0=500Hz、1000Hz、2000Hz下,电机低 速运行的噪声、振动、转速平稳程度, ② 描述不同V/f曲线下的起动能力 ③ 记录f0=2000Hz时线电压/线电流波形
SPWM变频调速实验
5、实验注意
(1)操作注意 * 观测电机电压、电流时注意探头公共地线接法 以U相为例
探头1
U V W
示波器探头地线
M
探头2
采样电阻
* 波形采集 使用示波器采集,自带拍照工具。
机电运动控制系统 机电运动控制系统 直流电动机的控制 SPWM变频调速
SPWM变频调速实验
5、实验注意
(1)实验报告注意 * 对实验波形,对照PWM调制理论进行分析,特别 是记录的波形 * 对观察、描述的实验内容作详尽的描述、分析, 得出和符理论的结论,特别报告: ① 不同调制比对运行性能的影响 ② 低速运行平稳性与调制比关系
(2)驱动电路 脉冲变换→光电隔离→施加在MOSFET栅极
机电运动控制系统 机电运动控制系统 直流电动机的控制 SPWM变频调速
SPWM变频调速实验
(3)过流保护 Idc
——主电路4-5间接采样电阻,检测其上电压 ——过流后发出“OC”信号 ● 封锁驱动电路脉冲 ● MP保护电路工作,显示“OC”,并停机 解除停机,按复位键。
1. 加深理解自然采样法形成双极性SPWM的机理; 2. 熟悉SPWM变频器功率主电路、控制电路的结构和连接 关系; 3. 了解SPWM调制三种控制方式、控制参数及输出波形。
机电运动控制系统 机电运动控制系统 直流电动机的控制 SPWM变频调速
基于8098单片机的SPWM变频调速系统研究
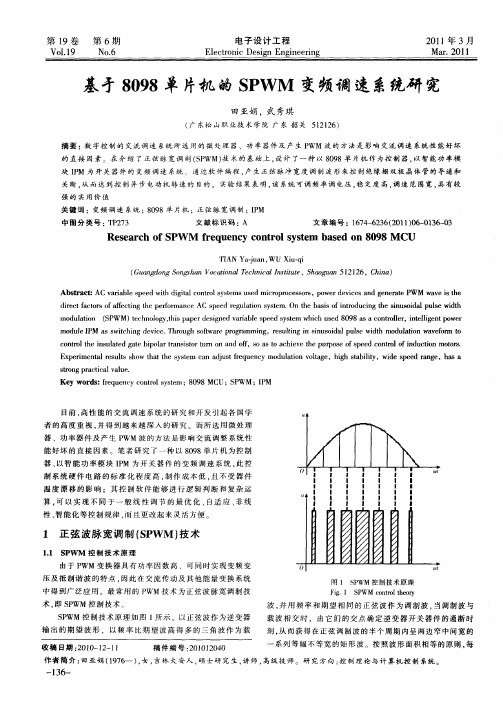
块 IM 为 开 关 器件 的 变频 调速 系统 通 过软 件 编 程 . 生 正 弦脉 冲宽 度调 制波 形 来控 制绝 缘栅 双极 晶体 管 的导 通和 P 产
关断 , 而达 到 控 制 异 步 电动 机 转 速 的 目的 。 实验 结果 表 明 , 系统 可调 频 率调 电压 , 定 度 高 , 速 范 围 宽 , 有较 从 该 稳 调 具
强 的 实用价 值
关 键词 :变频 调 速 系统 ;8 9 0 8单 片 机 ;正 弦脉 宽调 制 ;IM P
中圈分 类号 : P 7 T 23
文献 标 识 码 : A
文 章 编号 :17 — 2 6 2 l ) 6 0 3 - 3 6 4 6 3 (0 1 O — 1 6 0
Re e r h o PW M r q n y c nt o y t m a e n 8 9 CU s a c fS f e ue c o r ls se b s d o 0 8 M
PWM型变频器的基本控制方式
PWM型变频器的基本控制方式通用的PWM型变频器是一种交—直—交变频,通过整流器将工频交流电整流成直流电,经过中间环节再由逆变器将直流电逆变成频率可调的交流电,供给交流负载。
异步电动机调速时,供电电源不但频率可变,而且电压大小也必须能随频率变化,即保持压频比基本恒定。
PWM型变频器一般采用电压型逆变器。
根据供给逆变器的直流电压是可变的还是恒定的,变频器可分成两种基本控制方式。
(1)变幅PWM型变频器这是一种对变频器输出电压和频率分别进行调节的控制方式,其基本电路如图3-3所示。
中间环节是滤波电容器。
图2-3 变幅PWM型变频器晶闸管整流器用来调压,与一般晶闸管调压系统一样,采用相位控制,通过改变触发脉冲的延迟角α来获得与逆变器输出频率相对应的不同大小的直流电压。
逆变器只作输出频率控制,它一般是由6个开关器件组成,按脉冲调制方式进行控制。
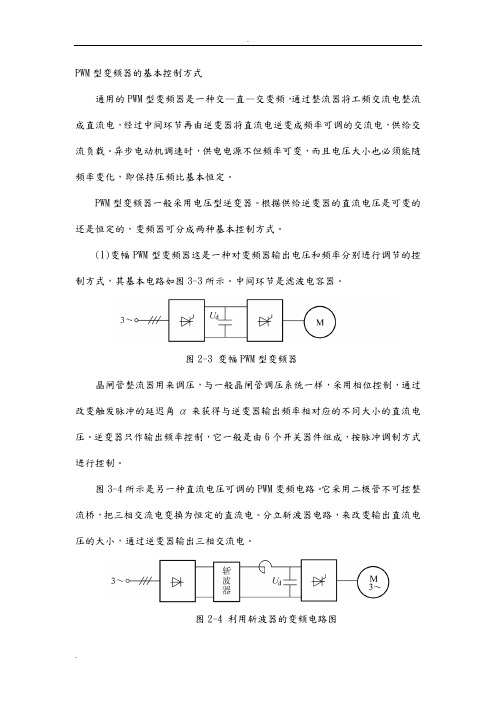
图3-4所示是另一种直流电压可调的PWM变频电路。
它采用二极管不可控整流桥,把三相交流电变换为恒定的直流电。
分立斩波器电路,来改变输出直流电压的大小,通过逆变器输出三相交流电。
图2-4 利用斩波器的变频电路图以上两种调压式变频电路,都需要两极可控功率级,相比较,采用晶闸管整流桥可以获得更大功率的直流电,由于可控整流桥采用相位控制,输入功率因数将随输出直流电压的减小而降低;而斩波式调压,输入功率变流级采用的是二级管整流桥,所以输入端有很高的功率因数,代价是多了一个斩波器。
另外,就动态响应的快速性来说后者比前者好。
(2)恒幅PWM型变频器恒幅脉宽调制PWM式变频电路如图3.3所示,它由二极管整流桥,滤波电容和逆变器组成。
逆变器的输入为恒定不变的直流电压,通过调节逆变器的脉冲宽度和输出交流电压的频率,既实现调压又实现调频,变频变压都是由逆变器承担。
此系统是目前使用较普遍的一种变频系统,其主电路简单,只要配上简单的控制电路即可。
它具有下列主要优点:1)简化了主电路和控制电路的结构。
基于dsPIC的SPWM变频调速控制系统

基于dsPIC的SPWM变频调速控制系统摘要:本文采用微芯公司的dsPIC30F4011单片机作为控制核心,针对逆变器结构,采用查表法产生三相SPWM波形,在MPLAB IDE v8.2集成环境下通过编译,烧录到单片机中调试运行。
最终实现三相异步电动机连续变压变频调速的功能。
关键词:正弦脉冲宽度调制(SPWM) 查表法三相桥式逆变电路Abstract:The design uses the dedicated motor driver chip Microchip´s dsPIC30F4011 microcontroller as the control center,using lookup-table method produces three-phase SPWM waveform. The program is compiled by the MPLAB IDE v8.2 integrated environment and be burnt to SCM to debug and run,and finally achieve the function of controlling the induction motor in a variable voltage and frequency way.Key words:SPWM;lookup-table;three-phase inverter bridge circuit三相异步电动机结构简单、运行可靠、重量轻、功率大,应用于生产和生活各方面。
电机运行时,由于转速与其旋转磁场转速有一定的转差关系,其调速性能较差,需借助调速系统提高其性能。
在变频调速系统中,SPWM(正弦脉冲宽度调制)技术得到了广泛应用。
SPWM控制基本思想是用一系列等幅不等宽的矩形脉冲来逼近理想正弦波,即利用一系列连续的三角波和正弦波相交,通过控制逆变器功率开关器件导通或关断,在逆变器输出端获得一系列宽度和正弦波幅值成正比的的矩形脉冲波形[1]。
SPWM变频调速系统的MATLAB仿真

SPWM变频调速系统的MATLAB仿真1.1系统仿真综述在采用电力半导体器件对电动机进行交流调速的分析研究中,计算机仿真技术已经显示出了它的巨大优越性。
MATLAB/SIMULINK环境是一种优秀的系统仿真软件,使用它可以大大提高系统仿真和CAD的效率和可靠性。
本设计的特点是用MATLAB对基于SPWM控制的交流异步电动机变频调速系统进行仿真分析。
系统仿真模型主要由整流器、滤波器、逆变器、电动机模型以及SPWM控制器几部分组成,对实际系统的分析与研究十分有帮助。
本文根据电力电子器件的开关原理、PWM调制方式的动作过程和自动控制理论,结合具体的电路拓扑结构并基于多信息融合思想,构建计算机仿真方案,在通过分析比较仿真波形、仪表的显示结果和存储示波器的记录,检验数学模型、电路拓扑结构、调节器方式和主要元器件参数是否正确,修改设计方案,逐步达到预期的目的。
本文用仿真调速系统控制一台三相异步电动机。
系统工作过程是:首先通过电网中获得三相对称交流电,然后经过三相不可控整流和SPWM控制方式下的逆变器为电动机提供电源。
电动机在三相逆变电源的控制下产生电磁转矩带动负载工作。
在本系统中,三相桥式逆变电路的基本工作方式采用的是导电方式,同一相(即同一半桥)上下两个臂交替导电,这样,在任意瞬间,将有3个桥臂同时导通。
在控制电路中,采用的是正弦波脉宽调制法(SPWM),即三角形载波信号和三相对称的正弦波参考信号相比较,在交点处发出三相脉冲调制信号,去驱动逆变器主回路的各IGBT的基极,当改变参考信号的幅值时,相电位脉冲的脉宽随之改变,从而改变了主回路基波相电压的大小。
当改变参考信号的频率时,输出电压的频率随之改变。
如果同时改变参考电压的幅值和频率,就可以实现变频调速系统u/f=常数的要求。
这种调制方式的特点是在半个周期内,脉冲间中心线等距,脉冲等幅、调宽,各脉冲面积之和与正弦波下的面积成正比。
在SPWM方式中,经常要用到调制系数M(M=调制波幅值/载波幅值)。
29采用SLE4520集成电路的三相SPWM异步电动机变频调速系统设计

前言现在电力拖动控制系统,根据控制对象和所采用的志动机的类型不同,可分为交流传动和直流传动两大类。
以晶闸管变流装置作为电动机电枢和磁场电源的直流传动系统和以PWM变换器为功率变换装置的直流脉宽调速系统由于在起、制动,正、反转,平滑调速,稳速,精度,响应速度等方面具有优良性能,历来是电力拖动系统中最通常的选择方案,但是直流电动机的机械式换向器则是它的主要薄弱环节,电动机在制造上费工费料,且维护麻烦,且不适宜在易燃易爆、尘埃多的场合使用,使得电动机的单机容量、过载能力、最高电压、最高转速和经济性能等要重要指标都受到了限制。
交流电机无换向片,结构简单、制造方便、价格低廉、易于维修、工作可靠,且能在恶劣的环境下工作。
故交流传动无论在应用范围还是在数量上,装机容量上都占有重要而特殊的位置。
但在要求调速传动的领域中,过云的技术手段并没有显示出交流电机的优越性。
功率半导体器件的出现,微电子技术和微型计算机技术的发展,以及现代控制理论的应用,为交流传动系统的进一步发展提供了有利的条件。
当前交流调速系统,如交流电动机的串级调速,各种变频调速,无换向器电动机调速等,从调速性能上已经达到与直流调速系统相媲美的程度。
而在高速、高压、大功率、恶劣环境等方面,更为直流传动所不及,可以预见新型交流调速系统在各个工业技术领域中会得到越来越广泛的应用,这表明电气交流传动的新时代已经到来。
签于交流传动在这几个方面的优势,所以我选择了这个毕业设计课题――采用SLE4520集成电路的三相SPWM异步电动机变频调速系统的设计,在此设计中,不公要动用微机控制技术,自动控制技术,单片机等相关知识,还要用到专业基础知识,如电机拖支,电力电子变流技术,数字及模拟电路等。
通过对本课题的设计,可以使所学知识有机联系起来,达到巩固,加深知识的目的,还可以拓宽知识面,培养解决实际问题的能力。
由于本人知识水平的限制,更兼时间仓促,设计中出现的错误及漏洞,敬请批评指正。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SPWM变压变频调速控制系统设计一、课程设计目的掌握交-直-交电压源型变频器的结构组成和工作原理,掌握变频器的主电路、控制电路、驱动电路以及保护电路的设计方法,掌握变频器主要元器件的选型方法。
二、设计内容、技术条件和要求设计交-直-交电压源型三相SPWM变频器,整流部分为二极管三相不控整流,并由大电容滤波,获得恒定直流电压,逆变器由6个电力晶体管GTR和6个续流二极管组成,并由8051和大规模集成电路HEF4752组成SPWM变压变频调速系统的控制电路。
基本设计参数:异步电动机额定功率11kW,额定电流22A,线电压380V,允许过载倍数=1.5,泵升电压U s=150V,逆变器输出频率范围4~60Hz,额定输出频率50Hz,负载功率因数cos≥0.5,负载引起直流电压脉动百分比K≤5%,U in(max)=10V,设计任务:1.设计主电路:选择GTR开关管和滤波电容参数;2.设计控制电路:采用大规模集成电路HEF4752,并设f smax=1000Hz,计算8253分频系数;3.设计驱动电路:采用分立元件或集成电路模块均可;4.画出系统主电路图、控制电路图、驱动电路图、保护电路图(过压保护和过流保护二选一);5.写出设计心得体会。
三、SPWM调速系统基本原理PWM的原理,就是面积等效原理,在采样控制理论中有一个重要的结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
所以可用等幅值的不同宽度的脉冲来等效一些想要的波形。
PWM技术是利用半导体开关器件的导通与关断把直流电压变为电压脉冲序列,并通过控制电压脉冲宽度或电压脉冲周期以达到改变电压的目的,或者通过控制电压脉冲宽度和电压脉冲序列的周期以达到变压和变频的目的。
变频调速中,前者主要应用于PWM斩波(DC-DC变换),后者主要应用于PWM逆变(DC-AC变换)。
PWM 脉宽调制是利用相当于基波分量的信号波(调制波)对三角载波进行调制,以达到调节输出脉冲宽度的目的。
相当于基波分量的信号波(调制波)并不一定指正弦波,在PWM优化模式控制中可以是预畸变的信号波,正弦信号波是一种最通常的调制信号,但决不是最优信号。
根据面积等效原理,PWM波形和正弦波是等效的,而这种的宽度按正弦规律变化而和正弦波等效的PWM波形,也称为SPWM(Sinusoidal PWM)波形。
三相交流电动机定子绕组中的三相交流电在定子隙圆周上产生一个旋转磁场,这个旋转磁场的转速称同步转速,记为n 实际电动机转速n要低于同步转速,故一般称这样的三相交流电动机为三相异步电动机。
异步电动机的同步转速,即旋转磁场的转速为:n1=60f其中1n为同步转速(r/min) f 1为定子频率,也就是电源频率(Hz); np为磁极对数。
异步电机的轴转速为n=n1(1-s)=60f1(1-其中s为异步电机的转差率, 由上面的公式可以看出,改变电源的供电频率可以改变电机的转速。
由电机理论知道,三相异步电机定子每相电动势的有效值为 E1=4.44f1n1φm .其中E1为气隙磁通在定子每相中感应电动势的有效值(V), f1为定子频率(Hz), n1为定子每相绕组匝数,φ为极磁通里(Wb)。
由上式可见主磁通中.是由E1和f 1。
共同决定的,如果保持E1和f1之比不变,就可以保持主磁通不变。
主电路设计1)主电路功能说明主电路为AC/DC/AC逆变电路,由三相整流桥、滤波器、三相逆变器组成。
三相交流电经桥式整流后,得到脉动的直流电压经电容器滤波后供给逆变器。
二极管整流桥把输入的交流电变为直流电,电阻R1为起动限流电阻,其上的电压波形反映了主回路的电流波形,可以用来观察波形。
C1为滤波电容。
可逆PWM变换器主电路系采用IGBT所构成的,IGBT (V1、V2、V3、V4、V5、V6)和六个续流二极管(VD1、VD2、VD3、VD4、VD5、VD6)组成的双极式PWM可逆变换器。
经变换器逆变,可将直流电源变成稳定的或可变的交流电源。
2)主电路设计整流器本课题中的整流器是使用六个二极管组成,它把工频电源变换为直流电源。
该电路整流输出接有大电容,而且负载也不是纯电感负载,但为了简化计算,仍可按电感计算,只是电流裕量要可适当取大些即可。
平波电路在整流器整流后的直流电压中,含有6倍频率的脉动电压,此外逆变变流器产生的脉动电流也使直流电压变动。
为了抑制电压波动,采用电感和电容吸收脉动电压(电流)。
在滤波电容选择时,C1一般根据放电的时间常数计算,负载越大,要求纹波系数越小,一般不做严格计算,多取2000μ以上.逆变器逆变器的作用是将直流功率变换为所要求频率的交流功率。
3)主电路电路图图1 主电路电路图主电路采用了交—直—交变频器,工作原理即:先将工频交流电源通过整流器变换成直流电,再通过逆变器变换成可控频率和电压的交流电,由于这类变压变频器在恒频交流电源和变频交流输出之间有一个“中间直溜环节”,所以又称间接式变频器。
它又分为电压源型和电流源型两种,电压源型采用较大电容量的电容器进行滤波,直流电路电压波形平直,输出阻抗小,电压不易变化,相当于直流恒压源,它在当前中小功率变频调速系统中应用十分广泛。
如下图3.2整流部分原理图图2 交-直-交变频电源整流部分原理图如图3,其中A,B,C是交流电输入端,接有熔丝,当出现电流过大时熔丝会自动熔断,起到保护整个电路的作用,在整流电路入口还接有电容和电阻,能够起到抗干扰的作用,使得系统的性能更加的稳定。
图3 整流部分原理图4)IGBT的分立驱动的实现IGBT的驱动设计问题亦即MOSFET的驱动设计问题,设计时应注意以下几点:①、IGBT栅极耐压一般在±20V左右,因此驱动电路输出端要给栅极加电压保护,通常的做法是在栅极并联稳压二极管或者电阻。
前者的缺陷是将增加等效输入电容Cin,从而影响开关速度,后者的缺陷是将减小输入阻抗,增大驱动电流,使用时应根据需要取舍。
②、尽管IGBT所需驱动功率很小,但由于MOSFET存在输入电容Cin,开关过程中需要对电容充放电,因此驱动电路的输出电流应足够大。
假定开通驱动时,在上升时间tr内线性地对MOSFET输入电容Cin充电,则驱动电流为Igt=CinUgs/tr,其中可取tr=2.2RCin,R为输入回路电阻。
③、为可靠关闭IGBT,防止擎住现象,要给栅极加一负偏压,因此最好采用双电源供电。
四、驱动电路设计1)辅助电源电路设计为了驱动主电路逆变桥的三个上桥臂的IGBT,必须给每一路提供一个隔离的25V电源而三个下桥臂可以共用一个电源。
此外,HEF4752及单片机系统还需要+5V 电源以及异步通讯所需的±12V 电源,一共需要6路电源,如图4所示。
该电源可以采用线性电源,也可采用开关电源。
前者体积大,笨重,但电路简单,各路电源完全独立,调试容易。
后者则轻便、小巧,电路相对较复杂。
采用单片开关电源芯片可大大简化电路。
图4 辅助电源电路设计 2) 驱动电路设计为了保证GTR 的理想驱动波形(见下图5)在驱动电路的设计中,这里可以有两种设计方案;1,采用分立元件 2,采用驱动模块图5 GTR 理想驱动波形采用分立元件时,如图6所示。
电路由电气隔离和晶体管放大电路两部分构成。
电路中的二极管VD2和电位补偿二极管VD3组成贝克箝位抗饱和电路,可使GTR 导通时处于临界饱和状态。
当负载轻时,如果V5的发射极电流全部注入V ,会使V 过饱和,关断时退饱和时间延长。
有了贝克电路后,当V 过饱和使得集电极电位低于基极电位时,VD2就会自动导通,使得多余的驱动电流流入集电极,维持Ubc ≈0。
这样,就使得V 导通时始终处于临界饱和。
图中的C2为加速开通过程的电容,开通时,R5被C2短路。
这样就可以实现驱动电流的过冲,同时增加前沿的陡度,加快开通。
另外,在V5导通时C2充电,充电的极性为左正右负,为GTR 的关断做做准备。
当V5截止V6导通时,C2上的充电电压为V 管的发射结施加反电压,从而GTR 迅速关断。
图6 分立元件构成的驱动电路当采用驱动模块时,这里使用M57215BL 型驱动模块。
M57215BL 是双列直插、 8引脚GTR 集成驱动电路,单电源自生负偏压工作,可以驱动50A ,1000V 以下的 GTR 模块一个单元;外加功率放大可以驱动75~400A 以上GTR 模块。
它的主要特点 是:图8 M57215BL 驱动模块原理图U in 为低电平(0~1V),GTR 模块的基射极被U EE 反向偏置,GTR 可靠截止。
U in 为高电平(4~5V),GTR 模块正向偏置,产生驱动电流 i b 。
五、 控制电路设计1) HEF4752芯片介绍HEF4752是采用LOCMOS 工艺制造的大规模集成电路,专门用来产生三相PWM 信号。
它的驱动输出经隔离放大后,既可驱动GTO 逆变器,也可驱动GTR 逆变器,在交流变频调速和UPS 中作中心控制器件。
①、主要特点:能产生三对相位相差120°的互补SPWM 主控脉冲,适用于三相桥结构的逆变器。
采用数控方式不仅能提高系统控制精度,也易于与微机联机 采用多载波比自动切换方式,随着逆变器的输出频率降低,有级地自动增加载波比,从而抑制低频输出时因高次谐波产生的转矩脉冲和噪声等所造成的恶劣影响。
调制频率的可调范围为0~100Hz ,且能使逆变器输出电压同步调节。
为防止逆变器上下桥臂器件直通,在每相主控脉冲间插入死区间隔,间隔时间连续可调。
②、引脚说明:HEF4752为28脚双列直插式标准封装DIP芯片,它有7个控制输入,4个时钟输入,12个驱动逆变器输出,3个控制输出。
其外部管脚排列如图9所示。
各管脚功能描述如表1所列。
图9 HEF4752外部引脚排列表1 HEF4752引脚功能2) HEF4752的调制方式和调制比它的调制方式为双边缘正弦调制,这种调制方式不同于三角波-正弦波调制法。
采用从载波脉冲两端改变脉冲宽度的双边缘正弦调制。
优点:在于可获得两倍载波频率的输出线电压脉冲,从而可减小低速 时的脉动转矩。
图10 HEF4752的正弦调制方式它的调制比定义为:其中U 为逆变器输出线电压有效值 U AB 为电动机额定线电压有效值 改变调制比ηV ,就可以改变逆变器输出电压U ηV 与时钟FCT 和VCT 的“频率比”成正比 如满足:则有可见:当固定f VCT 时,调制比ηV 与f FCT 成正比关系,而f FCT 又与逆变器输出频率f out 成正比关系。
所以:调节f FCT 可调电机转速,并实现U/f out =常值的“恒磁通控制”。
3) 单片机8051介绍单片机的40个引脚大致可分为4类:电源、时钟、控制和I/O 引脚。