对心曲柄滑块机构计算
曲柄滑块机构的运动精度分析与计算
曲柄滑块机构的运动精度分析与计算宋亮;赵鹏兵【摘要】曲柄滑块机构是一种典型的四连杆机构,尽管设计时理论计算可以达到很高的精度,但是由于构件的制造误差及运动副的配合间隙等因素,会使机构在运动中产生输出误差,有时还会显著超出机构设计的允许误差.依据概率统计的相关理论进行机构设计,即考虑构件制造尺寸的随机误差,以保证机构运动的精度在允许的误差范围内.利用MATLAB进行仿真计算和实例研究,得出了理论设计和精度分析的计算结果.该方法准确、效率高、而且适合其它类型的机构设计,具有较大的工程实际应用价值.%Slider-crank mechanism is a typical four-bar linkage, in spite of the high precision when it' s calculated theoretically. The manufacturing error and kinematic pair clearance of the components will lead to the output error during the motion of the mechanism. Sometimes,it will significantly exceed the tolerance of the design. According to the probability and statistics theory, the mechanism is designed, that' s considering the random error of the component to make sure that the motion accuracy is in the allowed error range. Utilizing MATLAB to simulate and calculate based on case studies. and the theoretical design and accuracy analysis are obtained. This method is accurate and very efficiently, it also can be used in other kind of mechanism design, and it has much more practical value in engineering.【期刊名称】《科学技术与工程》【年(卷),期】2011(011)010【总页数】5页(P2201-2205)【关键词】曲柄滑块机构;运动学;概率设计;等影响法;精度分析【作者】宋亮;赵鹏兵【作者单位】海军装备部,西安,710043;西北工业大学现代设计与集成制造技术教育部重点实验室,西安,710072【正文语种】中文【中图分类】TH112.1曲柄滑块机构是一种单移动副的四连杆机构,如图1和图2所示,分别为对心和偏心曲柄滑块机构。
对心曲柄滑块机构原理

对心曲柄滑块机构原理
嘿,朋友们!今天咱来唠唠对心曲柄滑块机构原理。
你说这对心曲柄滑块机构啊,就像是一场奇妙的舞蹈。
曲柄就像是领舞的那个,带着滑块一块儿动起来。
想象一下,曲柄慢悠悠地转呀转,滑块呢,就跟着它在那轨道上滑来滑去,是不是挺有意思?
这机构里的各个部分那可都有它的用处。
曲柄呢,就负责提供动力,让整个动作能持续进行。
而滑块呢,就老老实实地顺着轨道跑,完成它该完成的任务。
这就好比是一个团队,每个人都有自己的角色,少了谁都不行啊!
咱平常生活里也有好多类似的例子呢。
就说骑自行车吧,脚踩踏板就像是曲柄在转动,带动链条,然后轮子就跟着转起来,这不就跟对心曲柄滑块机构差不多嘛。
还有啊,那钟摆,一摇一摆的,不也有点那个意思嘛。
你可别小瞧了这对心曲柄滑块机构,它在好多地方都大显身手呢!在机械制造里,那可是立下了汗马功劳。
一些机器的运作就得靠它来带动,没有它,好多东西都没法正常工作啦。
而且哦,这对心曲柄滑块机构还特别稳定。
它不会轻易出啥乱子,总是稳稳当当的工作着。
就像咱身边那些靠谱的朋友,啥时候都能靠得住。
再说说它的灵活性吧。
它能根据不同的需求进行调整和改变,多厉害呀!就好像一个武林高手,能随时变换招式来应对不同的情况。
哎呀呀,说了这么多,你们是不是对对心曲柄滑块机构有了更深的了解呢?这玩意儿真的是又有趣又实用啊!它就像一个隐藏在机械世界里的小魔法,默默地发挥着自己的作用。
所以啊,咱可得好好认识认识它,说不定啥时候就能派上大用场呢!总之,对心曲柄滑块机构,真是个了不起的存在呀!。
曲柄滑块机构分析

Fx
A
60
B Fy
求解过程:
第一步:以曲柄1为研究对象进行受力分析,如图 所示:
X方向:F21*cos(60)+Fx+F=0 Y方向:Fy+F21*sin(60)=0 转矩平衡方程:F*OA-F21*OB*sin(60)=0 三个未知量,三个方程,则可求解得到F21,即 曲柄对连杆的作用力。
7
F4 F’x
D.其他情况
13
扩展1:曲柄滑块机构
M B
A C
D
14
扩展2:当杆长发生变化时,弹簧力会发生什 么变化?
D
F
D
F
200 100 B
A
C
500 100 B
A
C
D
F
200 100 B
A
C
15
课后作业2:教材P77,课后习题4
图2-128所示为曲柄导杆机构。已知曲柄长为 a=100mm,曲柄回转中心A与导杆摆动中心C的 距离为b=200mm。曲柄以ω=36(°)/s的角速 度匀速转动。 (1)试建立该曲柄导杆机构的虚拟样机模型。 (2)仿真机构的虚拟样机模型,并测量获取导杆 角度、角速度和角加速度的变化规律; (3)试根据仿真分析结果,计算求取机构的行程 速比系数
16
课后作业1:教材P77,课后习题5
在图2-129所示的对心曲柄滑块机构,已知曲柄为 100cmx10cmx5cm的钢质杆,连杆为200cmx10cmx5cm的用在曲柄上的 驱动力矩为M1=20N.m。 (1)试建立该曲柄滑块机构的虚拟样机模型; (2)请仿真机构的虚拟样机模型,并测量获取滑块3在0s-20s运 动时间内的位移、速度和加速度的变化规律。
曲柄滑块机构分析
机械原理 第03章 连杆机构

平面四杆机构具有急回特性的条件: (1)原动件作等速整周转动;
(2)输出件作往复运动;
(3)
0
B2
2.曲柄滑块机构中,原动件AB以 1等速转动 B 2 b B 1 C2 C3 a b 2 1 1 1 a B1 C2 C 3 C1 B1 H A
A
C1
4
4
H
B2
偏置曲柄滑块机构
对心曲柄滑块机构 H=2a, 0 ,无急回特性。
一.平面四杆机构的功能及应用
1 .刚体导引功能 2.函数生成功能 3.轨迹生成功能 轨迹生成功能 是指连杆上某点通过某一 预先给定轨迹 的功能。 连杆
§2-4 平面四杆机构运动设计的基本问题与方法
一.平面四杆机构的功能及应用
1 .刚体导引功能 3.轨迹生成功能 2.函数生成功能 4.综合功能 O1 D1 上剪刀 D2 下剪刀
(b>c) (2b)
'
B
1
a
A
b
c
d
4
D r 3
C b 3 c
a-d
B2
r2
d c a b (2a )
d b a c (2b')
由(1)及(2a' )(2b')可得
d+a
d a , d b, d c
铰链四杆机构的类型与尺寸之间的关系:
在铰链四杆机构中: (1)如果最短杆与最长杆的长度之和小于或等于其它两杆 长度之和 ——满足杆长和条件 且: 1 以最短杆的相邻构件为机架,则此机构为以最短杆 为曲柄的曲柄摇杆机构; 2 以最短杆为机架,则此机构为双曲柄机构;
2 4
摆动导杆 机构
导杆:
C 3
机械原理复习题(第3、4、5、8章)

第3章平面机构的运动分析第4章平面机构的力分析第5章机械的效率和自锁第8章平面连杆机构及其设计一、填空题:α=,则传动角γ=___________度,传动角越大,1、铰链四杆机构的压力角040传动效率越___________。
2、下图为一对心曲柄滑块机构,若以滑块3为机架,则该机构转化为机构;若以构件2为机架,则该机构转化为机构。
3、移动副的自锁条件是;转动副的自锁条件是。
4、曲柄摇杆机构中,当和共线时出现死点位置。
:5、曲柄摇杆机构中,只有取为主动件时,才有可能出现死点位置。
处于死点位置时,机构的传动角γ=__________度。
6、平行四边形机构的极位夹角θ=,它的行程速比系数K=。
7、曲柄滑块机构中,若增大曲柄长度,则滑块行程将。
8、如下图所示铰链四杆机构,70mm,150mm,110mm,90mm====。
若以a b c da杆为机架可获得机构,若以b杆为机架可获得机构。
9、如图所示铰链四杆机构中,若机构以AB杆为机架时,为机构;以CD 杆为机架时,为机构;以AD杆为机架时,为机构。
~10、在平面四杆机构中,和为反映机构传力性能的重要指标。
11、在曲柄摇杆机构中,如果将杆作为机架,则与机架相连的两杆都可以作运动,即得到双曲柄机构。
12、在摆动导杆机构中,若以曲柄为原动件,该机构的压力角为,其传动角为。
13、相对瞬心与绝对瞬心的相同点是,不同点是;在由N个构件组成的机构中,有个相对瞬心,有个绝对瞬心。
/二、判断题:1、对于铰链四杆机构,当机构运动时,传动角是不变的。
()2、在四杆机构中,若有曲柄存在,则曲柄必为最短杆。
()3、平面四杆机构的行程速度变化系数K 1,且K值越大,从动件急回越明显。
()4、曲柄摇杆机构中,若以摇杆为原动件,则当摇杆与连杆共线时,机构处于死点位置。
()5、曲柄的极位夹角θ越大,机构的急回特性也越显著。
()6、在实际生产中,机构的“死点”位置对工作都是不利的,处处都要考虑克服。
机械设计基础考试重点归纳
FR
N0000
FR
类型代号: 类型代号:
(N0000)
双列圆柱滚子 双列圆柱滚子轴承 圆柱滚
(NN0000) 9. 滚针轴承
结构特点:内外圈可分离, 结构特点:内外圈可分离,可以没有
保持架 只能承受径向负荷F 承载类型——只能承受径向负荷 R, 只能承受径向负荷 不能承受轴向负荷。 不能承受轴向负荷。
α
FR
承载类型——能同时承受径向负 载类型 荷FR与单向轴向负荷FA 类型代号: (70000) 类型代号: 使用要求: 使用要求:成对使用 FA
8.圆柱滚子轴承 8.圆柱滚子 圆柱滚
结构特点: 结构特点:内外圈可分离
只能承受径向负荷F 承载类型——只能承受径向负荷 R, 只能承受径向负荷 不能承受轴向负荷。 不能承受轴向负荷。 外圈无挡边圆柱滚子 外圈无挡边圆柱滚子轴承 圆柱滚
FA
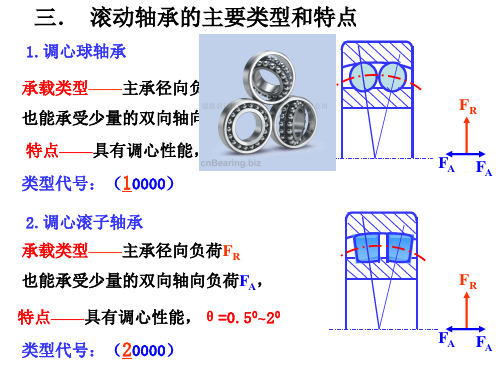
3.推力调心滚子轴承 3.推力调心滚子轴承 轴向负荷F 承载类型——可承很大的轴向负荷 A 载类型 可 很大的轴向负荷 和一定径向负荷 R 和一定径向负荷F 径向负荷 特点——具有调心性能,θ=20~30 具有调心性能, 特点 具有调心性能 类型代号:(29000) 类型代号: 000) FR
α
FR
FA
5.推力球轴承 5.推力球轴承
结构特点: 内孔较小,装在轴上) 结构特点:由紧圈(内孔较小,装在轴上) 内孔较大,装在机座上) 松圈(内孔较大,装在机座上)和滚动体
组成,套圈与滚动体可分离。 组成,套圈与滚动体可分离。
紧圈
滚动体
FA
只能受轴向负荷F 承载类型——只能受轴向负荷FA 载类型 只能受轴向负荷 极限转速低
v2 t1 ϕ1 180º +θ θ • k= v = t = ϕ = 180º −θ 1 2 2 180º +θ θ • k= 180º −θ θ=180º k −1 k+1
对心式曲柄滑块机构参考幻灯片

29
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
30
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
31
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
32
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
33
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
19
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
20
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
21
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
22
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
23
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
对心式曲柄滑块机构
偏心距e=0 右极限 位置
1
对心式曲柄滑块机构
偏心距e=0 右极限 位置
2
对心式曲柄滑块机构
偏心距e=0 右极限 位置
3
对心式曲柄滑块机构
偏心距e=0 右极限 位置
4
对心式曲柄滑块机构
偏心距e=0 右极限 位置
5
对心式曲柄滑块机构
偏心距e=0 右极限 位置
6
对心式曲柄滑块机构
13
对心式曲柄滑块机构
偏心距e=0 右极限 位置
14
对心式曲柄滑块机构
偏心距e=0 右极限 位置
铰链四杆机构的演化

对心曲柄滑块机构
偏置曲柄滑块机构
e≠0,偏置曲柄滑块机构 e = 0,对心曲柄滑块机构
对心曲柄滑块机构 偏置曲柄滑块机构
曲柄摇杆机构
曲柄滑块机构
偏置曲柄滑块机构
对心曲柄滑块机构
曲柄滑块机构的应用——内燃机
曲柄滑块机构的应用 对心曲柄滑块机构 ——滚轮送料机
曲柄滑块机构的应用——冲压机
偏心轮机构
在曲柄滑块机构中,当曲柄较短时,往往用一个旋转中心 与几何中心不重合的偏心轮代替曲柄,
只能以曲柄为主动件
二、导杆机构
取曲柄滑块机构的原连架杆2为机架而得到的,原连杆3 为主动件,若l3 l2,导杆1作整(ZHOU)运动,称为转动导 杆机构;若l3 l2,导杆1作往复摆动,称为摆动导杆机构,
2
3
4
1
3 4
2
3
4
2 1
1
应用实例:回转式油泵 转动导杆机构 牛头刨床的主体机构 摆动导杆机构
曲柄导杆机构
转动导杆机构 摆动导杆机构 移动导杆机构 曲柄摇块机构
转动导杆机构: 应用:旋转式水泵
有急回特性,无死点
摆动导杆机构的应用——牛头刨床主运动机构 以曲柄为主动件有急回特性
移动导杆机构的应用——手动抽水机构 取曲柄滑块机构中的原滑块4为机架而得到的,当原曲柄2 转动时,导杆1可在固定滑块4中往复移动,故该机构称为移 动导杆机构 或定块机构 ,
§5-3 铰链四杆机构的演化
• 演化的方法: 改变某些构件的形状、相对长度、选择
不同的构件作为机架
一、曲柄滑块机构: 当曲柄摇杆机构中的பைடு நூலகம்杆为无限长时,即为曲柄
滑块机构,具有一个移动副和三个转动副,
摇杆长 → ∞ → 直线 摇杆3 → 滑块