大滞后系统的Smith在线辨识预估控制的研究
大纯滞后过程特性Smith预估控制

过程控制系统课程设计题目之十三大纯滞后过程特性Smith 预估控制对于一个大纯滞后过程特性的对象:s PC e s s s G 10)12)(3(1)(-++=,试设计一个Smith 预估控制系统,并用SIMULINK 和MATLAB 程序仿真实现。
当系统设定值R(s)为1时,调整PI 参数,使过渡过程尽可能满意。
(假设检测变送环节的传递函数为1);比较在预估模型有偏差时,在相同的输入条件下,与预估模型无偏差情况的仿真结果;如果系统有扰动信号F(s)为单位阶跃信号或SINS 信号时,比较系统的仿真结果;如有可能,再试设计一种改进的Smith 预估器。
实验报告要求: 1、供系统仿真图;2、按照题目要求,给出每个实验的仿真结果图;3、根据以上仿真结果,分析)(s G PC 有滞后与无滞后情况下,PI 参数整定的特点。
大纯滞后过程特性Smith预估控制摘要:Matlab 是一套高性能的数值计算和可视化软件。
它集数值分析、矩阵计算、信号分析与图形显示为一体,构成的一个方便的、界面友好的用户环境。
历经二十几年的发展和竞争,现已成为国际公认的最优秀的科技应用软件。
Matlab 最突出的特点就是简洁、它用直观的、符合人们思维习惯的代码、代替C 语言和FORTRAN 语言的冗长代码。
为此,Matlab 获得了对应用学科的极强适应力。
在国内外高校、Matlab 已成为大学生,硕士生、博士生必须掌握的基本技能。
在设计研究学位和工业部门,Matlab 已经成为研究和解决各种具体工程问题的一种标准软件。
Matlab 软件广泛用于数字信号分析,系统识别,时序分析与建模,神经网络、动态仿真等方面有着广泛的应用。
利用Matlab 这个最优秀的科技软件,把计算机技术与信号分析紧密地结合起来,对信号进行分析处理仿真研究,经实例验证,取得了非常好的效果,具有一定的实用价值。
本文控制系统为研究主体,提出一种Smith 预估控制算法,通过设计自适应非线性反馈回路来自适应调节参数,从而满足对象参数大幅度变化的要求。
基于Matlab参数辨识的纯迟延系统预估控制在火电厂的应用
基于Matlab参数辨识的纯迟延系统预估控制在火电厂的应用邢红涛【摘要】在探讨Smith预传器的控制原理的基础上,针对制约其工程应用的参数估计问题阐述了一种用Matlab软件计算的工程案例.在分析其应用前景的同时,提出将DCS控制系统、Matlab软件和Smith控制有机结合的思路.【期刊名称】《河北电力技术》【年(卷),期】2008(027)004【总页数】3页(P12-13,27)【关键词】纯迟延;预估控制;Smith预估器;Matlab参数辨识【作者】邢红涛【作者单位】河北省电力研究院,石家庄,050021【正文语种】中文【中图分类】TP2721 概述在工业过程控制中,许多被控对象具有纯迟延的性质,在火电厂自动控制系统中也是如此。
这些系统由于能量或物料在介质中的传输,使被控参数惯性大,不能及时反映扰动量或控制量的变化。
在工业过程控制领域以传统PID控制为主,对于不能及时反馈偏差变化的纯迟延系统,PID控制这种基于偏差的控制方式,控制效果较差。
在应用于某些时滞大的对象时,还可能出现系统闭环稳定性降低、动态过程变差、调节品质恶化的现象。
所以,大惯性的纯迟延过程在传统控制领域是公认的控制难题。
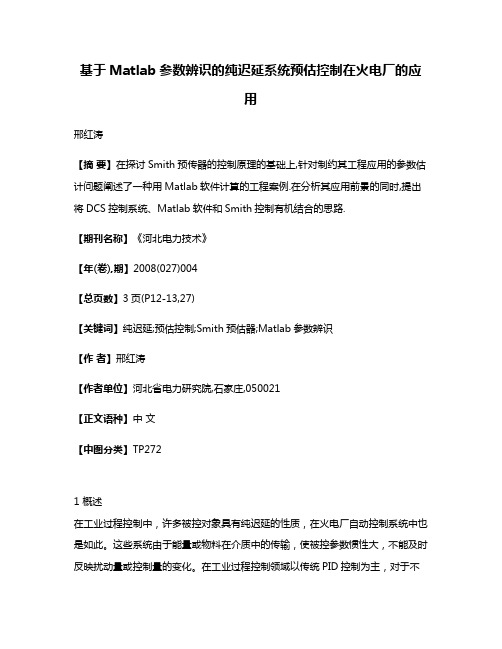
2 Smith预估器的控制原理Smith预估器是一种对大迟延系统进行补偿的控制算法。
该方法的基本原理是:在获取控制对象的基本结构和参数的前提下,由预估器对时滞进行补偿,使被延迟的被调量(偏差)提前反映,从而减小纯迟延造成的影响,提高系统的稳定性和控制品质。
如图1所示的控制系统,其闭环传递函数为:φ(1)图1 带纯迟延控制系统的等效框图其中,R为输入,E1为偏差,D为扰动,X为被控对象输出,Y为输出信号,GC、G0为传递函数。
其特征方程为1+GC(S)G0(S)e-ts=0。
可见特征方程中出现了纯迟延环节,使系统的稳定性降低。
如果t足够大,系统将会失去稳定。
对系统的内部特征进行分析后可知道,信号X在进入纯迟延环节前是没有延迟的,输出信号Y 是X经t延迟后的重复。
史密斯预估补偿控制与PID控制的比较研究_陆萍蓝

陆萍蓝1 , 张火明2 , 毛汝东3
( 1. 浙江工业大学 机电工程学院, 浙江 杭州 310014; 2. 中国计量学院 计量测试工程学院, 浙江 杭州 310018; 3. 中国计量学院 信息工程学院, 浙江 杭州 310018)
= 摘 要> 比较了两种工业过程控制中的控制器, PID 控制器和史 密斯预估 补偿控制器. 介绍 了四种 PID 参 数的整定方法, 分别为 试凑 法确 定 P ID 调节 参 数、Zieg ler- Nicho ls 参数 整 定方 法、最 优 PID 整 定算 法、运 用 M atlab/ simulink 中的 N CD O utpo rt( 非线性控制设计输出端 口模块 ) 模 块对 PID 参数 进行最 优整定. 史密 斯 预估补偿控制器主要用于工业控制中的大延时系统控制, 以提高系统的阶跃响应性能. 在理论上, 史密斯预估 补偿控制器提供了一个有效的方法来提高控制效果. 运用 M atlab/ Simulink 仿真方 案对前述两 种控制方 法进 行了仿真比较, 结果表明, 在有较大延时情况下, 史密斯预 估补偿控制能获得比 PID 控制更好的结果.
3. Coll ege of Inf ormation Engin eering, C hina Ji lian g U n iversit y, H angz hou 310018, China)
Abstract: Two kinds of contro ller used in industrial process control were compared. Four methods for tuning the parameters of the PID contro ller wer e presented. T he Smith predictive compensation controller w as mainly used in the long- time delay industrial process to improve the step response performance of the system. In theor y, the Smith predictive compensation contr oller could provide an effective way to improve the control effect. T he Matlab/ Simulink was employed to compare the two fo re- mentioned co ntroller s. T he outcome indicates that under the condition of a long- time delay, the Smith predictive compensation contro ller can achieve better results than those achieved by the PID contro ller.
Smith预估控制原理
R(S)
这样,引入了Smith预估器后,系统 中等效对象的传递函数就不含纯滞 s 后环节 e 部分
_
D(S)
G(s)
e s
显然,经Smith预估补偿后,已消除了纯滞后部分对控制系统的影响,而受控制对象的纯 滞后部分在等效系统的闭环控制回路之外,不影响系统的稳定性。所以对任何纯滞后时 间,系统都是稳定的。
u (t ) K P e(t ) TI
e(t )d (t ) T
0
D
dt
式中u(t)-控制器的输出; e(t)-控制器的输入,它是给定值和被控对象输出的差,称为偏差 信号;
K P -控制器的比例系数;
TI
TD
-控制器的积分时间; -控制器的微分时间。
PID控制器各控制规律的作用如下: (1)比例控制(P):比例控制是一种最简单的控制方式。其控制器的输 出与输入误差信号成比例关系,能较快克服扰动,使系统稳定下来。但当仅 有比例控制时系统输出存在稳态误差 (2)积分控制(I):在积分控制中,控制器的输出与输入误差信号的积分 成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称 此控制系统是有差系统。为了消除稳态误差,在控制器中必须引入“积分项” 积分项对误差的累积取决于时间的积分,随着时间的增加,积分项会越大。 这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输 出增大使稳态误差进一步减小,直到等于零。但是过大的积分速度会降低系统 的稳定程度,出现发散的振荡过程。比例+积分(PI)控制器,可以使系统在进 入稳态后无稳态误差。 (3)微分控制(D):在微分控制中,控制器的输出与输入误差信号的微分 (即误差的变化率)成正比关系。自动控制系统在克服误差的调节过程中可能 会出现振荡甚至失稳。其原因是由于存在有较大惯性环节或有滞后环节,具有 抑制误差的作用,其变化总是落后于误差的变化。解决的办法是使抑制误差的 作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。
时变大时滞系统的一种智能控制策略

An Intelligent Contr ol Str atagem for Time-var ying Lar Chang Cha ng2 Ma Binsheng3 (1.Electric Information College, Taiyuan Univers ity of Science and Technology, Taiyuan 030024;
Smith 预估器是大时滞系统常用的一种补偿控 制方 法,主 要原 理是 预先 估计 出被控 过程 的动 态模 型, 然后将 预估 器并 联在 被控 过程上 ,使 其对 过程 中的纯滞后特性进行补偿,力图将被延迟了时间 τ 的被控 量提 前送入 调节 器,因 而调 节器能 提前 动作, 这样 就通过 补偿 装置 消除 了纯 滞后特 性在 闭环 中的 影响 。从而 可明 显地 减小 过程 的超调 量、 缩短 过渡
本文采 用的 控制 策略 为:在 应用 改进 的自 适应 向量遗忘因子 RLS 法辨识系统参数的同时,利用遗 传算 法在 线辨 识 时变 时滞 [4], 尽量 使它 取得 全 局最 优,从而得到较精确的数学模型,然后利用 Smith 预估 器对系 统进 行预 估补 偿控 制,提 高系 统的 控制 性能。
研究与开发
时变大时滞系统的一种智能控制策略
潘 峰 1 常 嫦 2 马兵胜 3
(1.太原科技大学电子信息工程学院,太原 030024; 2.太原重工集团技术中心,太原 030024; 3.山西省自动化研究所,太原 030012)
摘要 针对具有复杂非线性特征的时变大时滞系统,本文提出了一种新的智能控制策略。 该方 法利 用遗 传算 法来 辨识 系统 的时 变时 滞, 用改 进的 自适 应向 量遗 忘因 子法 来辨 识系 统的 时 变参数,然后利用 Smith 预估器对系统进行预估补偿控制,取得了良好的控制效果。
实验三Smith预估

实验三S m i t h预估 The following text is amended on 12 November 2020.实验报告||实验名称Smith预估控制算法设计实验课程名称计算机控制技术与系统||实验三 Smith 预估控制算法设计实验1、实验目的在控制算法学习的基础上,根据给定对象特性设计Smith 预估控制器算法,并利用Matlab 软件进行仿真实验,同时与PID 算法控制算法进行比较,加深对该控制算法的掌握和理解。
2、系统结构框图Smith 预估控制系统框图为:3、实验过程及分析设广义被控对象为要求一:取τ=2、T 1=,取采样时间T=1s ,采用零阶保持器,使用Matlab 函数求取出广义对象的z 传递函数;实验过程:使用matlab 求z 传函的函数:clc;clear all;close all;T=1;T1=;tao=2;G0=tf([1],[T1 1],'inputdelay',tao)sysd=c2d(G0,T,'zoh')上述函数将s 传函210(s) 2.881s G e s -=+转化为z 传函20.29340(z)0.7066G z z -=-。
要求二:通过对象阶跃响应曲线,整定PID 参数,采用常规PID 进行给定值扰动和外部扰动响应实验,并绘制控制器输出P 和系统输出y 响应曲线; 实验过程:借助matlab 软件中的simulink 搭建系统仿真模型。
首先将外部扰动置零,利用阶跃响应曲线来整定PID 参数。
利用试凑法整定PID 参数。
PID 控制器的数学描述如下。
首先只给比例作用,调节系统使其稳定;其次加入积分作用消除系统静差;最后加入微分作用。
最后合理调整各个参数,使系统品质达到最优。
经过整定,最终选取P=,I=,D=0,N=100,系统可以相对较好的稳定下来。
输出的曲线如下在30T 的时候在对象之前加入的阶跃干扰,在50T 的时候在对象之后加入幅值为的阶跃扰动,得到的系统的输出曲线如下。
大纯滞后在对象控制方法应用研究

大纯滞后在对象控制方法应用研究摘要:针对一般工业过程中存在的大纯滞后问题,提出了一种克服大纯滞后的预测控制方法。
利用递推最小二乘法进行参数估计,获得对象的一阶简化模型,提出了一种Smith预估神经元控制器设计方法,再用构建的神经网络预测模型预测出未来相应时刻的系统输出,然后用该输出来调整当前时刻的控制量,从而达到预期的控制目的,仿真结果验证了该方法的有效性。
关键词:神经网络;预测控制;大纯滞后0 前言一般工业过程中都具有非线性大纯滞后的特点,特别是滞后较大(即额定滞后S/T>0.5)的系统,常规控制往往无能为力。
采用Smith控制是解决对象大纯滞后问题的有效方法,但它需要建立对象的精确的数学模型,而且鲁棒性和抗干扰能力较差,面向对象的神经元模型及其学习算法具有算法简单、适应性好等优点,但是对于大纯滞后过程,由于被控量的偏差不能及时反映控制量的变化影响了神经元的控制效果。
预测控制是上世纪70年代兴起的一种新控制算法,在工业上已被广泛应用,其主要思想是:在当前时刻,基于过程的动态模型预测未来一定时域内每个采样周期(或按一定间隔)的过程输出,即可以根据当前的输入预测未来多个时刻的输出,从而根据控制要求调整下一时刻的控制量,有利于对纯滞后系统的控制,将预测函数控制应用于大纯滞后温度控制系统,减少了稳态静差,但超调量偏大,要有一种具有自补偿功能的非线性预测反馈校正法,提高了系统的鲁棒性,但该方法限于纯滞后时间已知的情况下,对于纯滞后参数未知或者改变的情况未加讨论。
根据上述情况提出一种用神经网络辨识系统的滞后时间参数,用预测控制算法实现对大纯滞后对象的控制方法。
其中预测模型是用神经网络逼近被控的动态对象而建立的,从而无需知道系统的精确数学模型。
1 神经元模型及控制系统1.1神经元模型针对将神经网络直观套用于自动控制中存在的局限性,提出了一种面向控制的神经元模型它的输出u(t)可以表示为u(t)=K∑wi(t) xi(t) (1)式中:K>0,为神经元的比例系数;xi(t)为神经元的n个输入状态;wi(t)为相应于xi(t)的加权值;wi(t)由某种学习算法确定。
Smith预估器控制设计
Smith预估器控制设计《计算机控制》课程设计报告题⽬: Smith预估器控制设计姓名: 学号:姓名: 学号:姓名: 学号:2010年12⽉3⽇《计算机控制》课程设计任务书指导教师签字:系(教研室)主任签字:2010年7 ⽉5 ⽇Smith 预估器控制设计⼀.实验⽬的被控对象为ses G s+=-110)(1.0,画出系统框图,设计Smith 数字预估器。
三.控制系统仿真 1.⽅案设计已知纯滞后负反馈控制系统,其中其中D(s)为调节器传递函数,ses G s+=-110)(1.0为对象传递函数,其中G 0(s)e -0.1s包含纯滞后特性,纯滞后时间常数τ=0.1。
系统的特征⽅程为:0.1101()()1()01seD s G s D s s-+=+=+由于闭环特征⽅程中含有0.1se -项,产⽣纯滞后现象,有超调或震荡,使系统的稳定性降低,甚⾄使系统不稳定。
为了改善系统特性,引⼊Smith 预估器,使得闭环系统的特征⽅程中不含有0.1se-项。
Smith 纯滞后补偿的计算机控制系统为:上图所⽰Z O H 为零阶保持器,传递函数:1()Tsh e G s s--=并且有:lT τ=(l 为⼤于1的整数,T 为采样周期)。
2.采样周期T 的选择采样周期在计算机控制中是⼀个重要的参数。
从信号保真度看,采样周期不宜太长,即采样频率不应该过低。
Shannon 采样定理给出了下限⾓频率ωs ≧2ωmax ,ωmax 为原信号的最⾼频率;采样周期应尽可能的短,以使采样后的离散信号可以近似于连续信号,数字控制具有接近于连续控制系统的质量。
但采样频率过⾼,将使得数据存数容量加⼤,计算⼯作量加⼤,并且采样频率⾼到⼀定程度,对系统性能的改善效果并不显著。
所以,我们要找到⼀个最佳的采样周期。
纯滞后较⼤不可忽略时,可选择T 在/10τ附近,当纯滞后占主导地位时,可选择T 约为τ,再加上参考课本上表3.4扩充响应曲线法选择数字PID 参数计算公式,预选了l =2,3,5,10。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Re e r h n a g i e e a y t m a e n nl d ntfc to s a c o l r e tm -d l y s se b s d o o i i e i a i n ne i
0 引 言
大多数 的工业过程一般情况下都是稳定的 , 过去 围绕稳定的过程提 出了许多有效的 控制方法 , 但是由 于大时滞 的存在严重影响 了系统的控 制效果 和稳定 性, 限制 了可 以达到的带 宽和高增益的使用 , 导致 系 统的超调 变大 , 调节时间变长 , 甚至出现振荡和发散 , 使时滞过程很难控制。时滞系统的控制问题一直是控 制理论和控制工程实践 中的难点 , 时滞环节的存在很 大程度上相当于使 系统变成 了无穷 阶, 有无数个闭环 极点 , 当前施加的控制作用需要经过一段时间才会在 输出上反映出来。根据一般 的理论分析可以得出: 时
T ersl fs l i rtescn — re pu ued l o e ojc i r i ote o ntel m h w ta teo l e h eut o i ao f eod odr lspr e ym d l bet wt o t u r ri a t eso ht h ni s mu t n o h a s h wh r h gi n
胡 素 红 , 建 安 方
( 东华大学 信息科学与技术学院,上海 2 12 ) 0 60
摘要 : 工业过程 中普遍存在大时滞对象 , 为解决大滞后复杂系统因无法建立精确数学模型而难于控制的问题 , 将史密斯 (mt) S i 预估 h
控制原理 和在线辨识方法结合起来 , S i 在 mt h预估控制 系统 中, 用系统辨识的模型代替传统预估补偿模 型 , 根据 最小二乘辨识算法
o m i r d ciec n r l fS t p e i t o t o h v
HU S - o g ANG in a u h n ,F Ja - n (ntueo ce c n eh o g , o g u nv r t, h n h i 0 6 0 C ia Is tt f ineadT c n l y D n h aU i sy S a g a 2 12 , hn ) i S o ei
c n r lw sr p a e y s se i e t c t n mo e ih u i z d r e rie la t s u r o i e t y t e v ro s p r mee s o h d 1 o t a e lc d b y tm d n i ai d lwhc t ie e u sv e s - q a e t d n i h a u aa t r ft e mo e . o i f o l f i
i e t c t n o mi r d c ie c n o a h e t ef r n e id x sa d b t rr b sn s . d n i ai fS t p e it o t lh st e b s p r ma c n e e n et u t e s i f o h v r o e o Ke r s mi s c n — r e l sp r ea ; n i e i e t i ain; I d cie c n r l y wo d :S t e o d o d rp u u e d l y o l n i c t h; n d f o p it o to v
第2 9卷 第 3期
21 0 2年 3 月
9 No3 o .2 . Ma .2 1 r 02
J un lo c a ia o r a fMe h nc l& E e tc lE gn e n lcr a n ie r g i i
大滞后系统的 S t mi h在线辨识预估控制的研究
辨识模型 的各个参数 , 出了 S i 在线辨识预估控制算法 ; 提 mt h 针对二 阶加纯滞后对象在滞后时 间有, 无建模误差进行 了仿真研究 。研
究结果表 明,mt 在线 辨识 预估控制的性能指标 和鲁棒性有很大的改善 。 Si h 关键词 : m t; S il二阶加纯滞后 ; } 在线辨识 ; 预估控制
Ab t a t T e lr e t sr c : h ag i me— e a s 0 ln e it n n i d sr r c s e .I r e o s le te p o l m f dfju t t o t l w t o t d l y i f x se t i n u t a p o e s s n o d r t ov h r b e o i c l o c n r i u e i l f o h a c r t y tm d ld r g t e ln me d l y c nr l n o l e i e t c t n o mi r dc ie c n r l r o y tm i h o g c u ae s se mo e u n o g t - e a o t ,a n i d ni ai fS t p e it o t l ra s se w t t e ln i h i o n i f o h v oef h t - ea sp o o e .C mb n d t e S t r d cie c nr lwi n i e ie t c t n, e ta i o y tm d li mi r d ci e i me d l y wa r p s d o i e h mi p e it o t t o l d n i a i t rd t n s se mo e n S t p e it h v o h n i f o h i h v