最新实用的步进电机驱动电路(图)
P2 P3 运动扩展型接线图、86步进电机与驱动器接线图

PUL+ PULDIR+ DIR-
脉冲正 脉冲负 方向正 方向负
图名 86或110步进电机及驱动器接线说明
日期
版本 C
页码 3/3
制图 LJQ 审核
批准
电机驱动器接线图
控制器的 脚接到继电器驱动电源的
端,继电器线圈的一端接
,
线圈的另一端接输出点 控制器 脚 ,当第一输出点有输出信号时, 脚
输出一个低电平,此时为
,继电器的线圈得到 的工作电压,开关
吸合,即 、 脚导通,当第一输出点没有输出信号时, 脚为悬空状态,
继电器没有工作电压, 、 脚断开。
如图所示,由点动开关给控制器提供输入信号,首先,控制器
86或110步进电机
电机A组线圈 A+ 电机A组线圈 A电机B组线圈 B+ 电机B组线圈 B-
M806或M1106步
进驱动器 ~ 驱动器外接电源AC80V
A+ A-
AC ~~
驱动器外接电源AC80V
PUL+ 脉冲/方向公共正5V(控制器12脚)
PUL- 控制器脉冲信号(控制器10脚)
B+ DIR+
串口 接头
7 供电 8 供电
标准RS232通信接口
9
10
输出电路内结构图
11 12
输入电路内部结构图 13
14
15
16
171819202122232425262728293031323334353637
输入24V地
注意: 1、输入输出信号均为“低电平”有效;
步进电机接线图
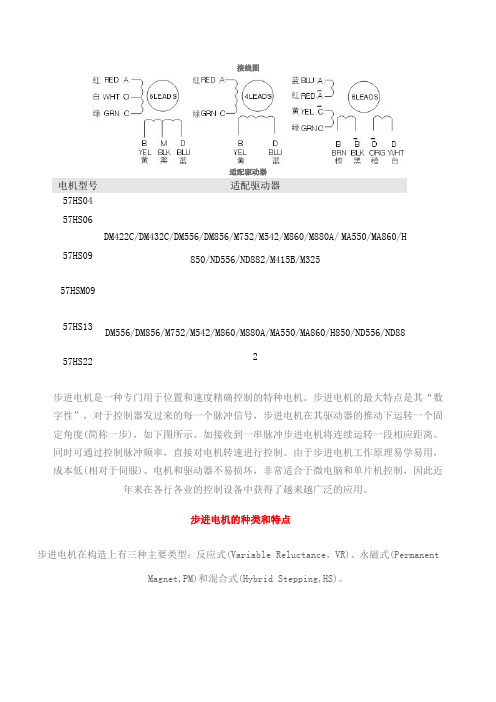
接线图适配驱动器电机型号 适配驱动器57HS04 DM422C/DM432C/DM556/DM856/M752/M542/M860/M880A/ MA550/MA860/H850/ND556/ND882/M415B/M32557HS0657HS0957HSM0957HS13DM556/DM856/M752/M542/M860/M880A/MA550/MA860/H850/ND556/ND88257HS22步进电机是一种专门用于位置和速度精确控制的特种电机。
步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。
如接收到一串脉冲步进电机将连续运转一段相应距离。
同时可通过控制脉冲频率,直接对电机转速进行控制。
由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。
步进电机的种类和特点步进电机在构造上有三种主要类型:反应式(Variable Reluctance ,VR)、永磁式(PermanentMagnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达°、但动态性能差、效率低、发热大,可靠性难保证。
* 永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为°或15°)。
* 混合式混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。
最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。
一份步进电机驱动器整机电路图原创
一份步进电机驱动器整机电路图(原创)在由上位机或PLC为主的工控系统中,尤其是在对各种机械设备的控制中,常常看到PLC、触摸屏、伺服电机驱动器、伺服电机或步进电机驱动器、步进电机的组合应用。
对于伺服电机和步进电机,由于结构简单,原理上也不是太复杂,看到实物,再配合应用,就了解了。
但对电机驱动器的结构和电路,限于各种条件,就难以知道其“本来面目”了。
本人由于工作关系,接手了一台需维修的步进电机驱动器,又由于维修的需要,测绘了步进电机的整机电路图,浏览之下,就知道步进电机驱动器是个怎么回事了。
在此将整机全图奉献于大家。
整机全图共4张。
第一张图:步进电机驱动的主电路和开关电源电路。
步进电机驱动器的功率输出电路的形式同变频器主电路是相似的。
每一路皆由两只IGBT管子做推挽式输出,在管子上也反向并联了二极管,以提供反向电流的通路,进而保护IGBT管子的安全。
IGBT 管子的过流保护信号由AR1、BR1两只电阻上取得,此两只电阻将流经IGBT管子的电流信号转化为电压信号,经后级保护电路处理,送入单片机。
开关电源输出的+5V,作为单片机的电源。
另外,+5V、-5V还作为保护电路的双电路供电。
一路+15V电源,经PIC和PT1转化为四路15V电源,供四路驱动电路用。
第二张图:驱动电源及端子信号来源。
由电源板来的+15V电源,经NE555时基电路振荡逆变,开关变压器PT1四个次级绕组输出四组互相隔离的15V直流电压,供驱动IC的供电;第三张图:步进电机驱动器的脉冲驱动电路及步时电机的工作电流设定电路等。
驱动IC采用IS2110S专用的驱动芯片,单片机输出的四路脉冲信号经由74LS08四二输入与门电路处理后,送入四片IS2110S驱动电路,经光电隔离和功率放大后,送放逆变功率电路,输入步进脉冲到步时电机;第四张图:CPU(单片机)电路和控制端子内电路图。
步进电机驱动器是由单片机生成四路脉冲信号,经后续电路驱动功率输出电路,进而驱动步进电机的。
电机驱动器的整机电路图
一份步进电机驱动器整机电路图(原创)在由上位机或PLC为主的工控系统中,尤其是在对各种机械设备的控制中,常常看到PLC、触摸屏、伺服电机驱动器、伺服电机或步进电机驱动器、步进电机的组合应用。
对于伺服电机和步进电机,由于结构简单,原理上也不是太复杂,看到实物,再配合应用,就了解了。
但对电机驱动器的结构和电路,限于各种条件,就难以知道其“本来面目”了。
本人由于工作关系,接手了一台需维修的步进电机驱动器,又由于维修的需要,测绘了步进电机的整机电路图,浏览之下,就知道步进电机驱动器是个怎么回事了。
在此将整机全图奉献于大家。
整机全图共4张。
第一张图:步进电机驱动的主电路和开关电源电路。
步进电机驱动器的功率输出电路的形式同变频器主电路是相似的。
每一路皆由两只IGBT管子做推挽式输出,在管子上也反向并联了二极管,以提供反向电流的通路,进而保护IGBT管子的安全。
IGBT 管子的过流保护信号由AR1、BR1两只电阻上取得,此两只电阻将流经IGBT管子的电流信号转化为电压信号,经后级保护电路处理,送入单片机。
开关电源输出的+5V,作为单片机的电源。
另外,+5V、-5V还作为保护电路的双电路供电。
一路+15V电源,经PIC和PT1转化为四路15V电源,供四路驱动电路用。
第二张图:驱动电源及端子信号来源。
由电源板来的+15V电源,经NE555时基电路振荡逆变,开关变压器PT1四个次级绕组输出四组互相隔离的15V直流电压,供驱动IC的供电;第三张图:步进电机驱动器的脉冲驱动电路及步时电机的工作电流设定电路等。
驱动IC采用IS2110S专用的驱动芯片,单片机输出的四路脉冲信号经由74LS08四二输入与门电路处理后,送入四片IS2110S驱动电路,经光电隔离和功率放大后,送放逆变功率电路,输入步进脉冲到步时电机;第四张图:CPU(单片机)电路和控制端子内电路图。
步进电机驱动器是由单片机生成四路脉冲信号,经后续电路驱动功率输出电路,进而驱动步进电机的。
步进电机接线图

步进电机接线图 Final revision by standardization team on December 10, 2020.接线图适配驱动器电机型号 适配驱动器57HS04 DM422C/DM432C/DM556/DM856/M752/M542/M860/M880A/ MA550/MA860/H850/ND556/ND882/M415B/M32557HS0657HS0957HSM0957HS13DM556/DM856/M752/M542/M860/M880A/MA550/MA860/H850/ND556/ND88257HS22步进电机是一种专门用于位置和速度精确控制的特种电机。
步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。
如接收到一串脉冲步进电机将连续运转一段相应距离。
同时可通过控制脉冲频率,直接对电机转速进行控制。
由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。
步进电机的种类和特点步进电机在构造上有三种主要类型:反应式(Variable Reluctance ,VR)、永磁式(PermanentMagnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达°、但动态性能差、效率低、发热大,可靠性难保证。
* 永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为°或15°)。
* 混合式混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
(整理)基于AT89C2051的步进电机驱动器系统电路原理

-------------
基于AT89C2051的步进电机驱动器系统电路原理
步进电机驱动器系统电路原理如图3:
图3 步进电机驱动器系统电路原理图
AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。
图中L1为步进电机的一相绕组。
AT89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
图3中的RL1~RL4为绕组内阻,50Ω电阻是一外接电阻,起限流作用,也是一个改善回路时间常数的元件。
D1~D4为续流二极管,使电机绕组产生的反电动势通过续流二极管(D1~D4)而衰减掉,从而保护了功率管TIP122不受损坏。
在50Ω外接电阻上并联一个200μF电容,可以改善注入步进电机绕组的电流脉冲前沿,提高了步进电机的高频性能。
与续流二极管串联的200Ω电阻可减小回路的放电时间常数,使绕组中电流脉冲的后沿变陡,电流下降时间变小,也起到提高高频工作性能的作用。
-------------。
L297L298步进电机控制电路图

L297L298步进电机控制电路图部门: xxx时间: xxx制作人:xxx整理范文,仅供参考,可下载自行修改L297的工作原理介绍L297是意大利SGS半导体公司生产的步进电机专用控制器,它能产生4相控制信号,可用于计算机控制的两相双极和四相单相步进电机,能够用单四拍、双四拍、四相八拍方式控制步进电机。
芯片内的PWM斩波器电路可开关模式下调节步进电机绕组中的电机绕组中的电流。
该集成电路采用了SGS公司的模拟/数字兼容的I2L技术,使用5V的电源电压,全部信号的连接都与TFL/CMOS或集电极开路的晶体管兼容。
L297的芯片引脚特别紧凑,采用双列直插20脚塑封封装,其引脚见图1,内部方框见图2。
在图2所示的L297的内部方框图中。
变换器是一个重要组成部分。
变换器由一个三倍计算器加某些组合逻辑电路组成,产生一个基本的八格雷码(顺序如图3所示>。
由变换器产生4个输出信号送给后面的输出逻辑部分,输出逻辑提供禁止和斩波器功能所需的相序。
为了获得电动机良好的速度和转矩特性,相序信号是通过2个PWM 斩波器控制电动波器包含有一个比较器、一个触发器和一个外部检测电阻,如图4所示,晶片内部的通用振荡器提供斩波频率脉冲。
每个斩波器的触发器由振荡器的脉冲调节,当负载电流提高时检测电阻上的电压相对提高,当电压达到Uref时(Uref是根据峰值负载电流而定的>,将触发器重置,切断输出,直至第二个振荡脉冲到来、此线路的输出(即触发器Q输出>是一恒定速率的PWM信号,L297的CONTROL端的输入决定斩波器对相位线A,B,C,D或抑制线INH1和INH2起作用。
CONTROL为高电平时,对A,B,C,D有抑制作用;为低电平时,则对抑制线INH1和INH2有抑制作用,从而可对电动机和转矩进行控制。
b5E2RGbCAP图1 L297引脚图图2 L297内部方框电路图图 3 L297变换器换出的八步雷格码<顺时针旋转)图4 斩波器线路图5 多个L297同步工作连接图L297 ABSOLUTE MAXIMUM RATINGS绝对最大额定值:L297 ELECTRICAL CHARACTERISTICS (Refer to the block diagram Tamb = 25℃, Vs = 5V unless otherwisep1EanqFDPwspecified> L297 电气特性:L297各引脚功能说明1脚(SYNG>——斩波器输出端。
8线步进电机接线图图解

8线步进电机接线图图解KincoCM880A步进驱动器使用指南A.先用万用表测量8个引线之间的电阻,可判断出4组线圈引线;B.由于只接1、6,2、8或1、6,7、4二个线圈电机也能正常转动,所以,在4个线圈中任选2个,接在驱动器上;如果电机不转,说明这2组线圈是A相线圈;另外2个线圈是B相的2个线圈;如果电机转动,说明这2个线圈一个是A相,一个是B相线圈;C.接2组线圈让电机转动后,再从剩下的2个线圈中任选一个线圈,串联在A相线圈上;如果步进电机正常转动了,说明该线圈是A相的另一个线圈;如果电机不转,将这个线圈的正负对调后再试一次,如果电机还不转,说明该线圈是B相的另一个线圈;D.用上述同样方法,可以确定后一个线圈的极性。
步进电机接线图,8线步进电机接线图图解步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
KincoCM880A步进驱动器使用指南工作原理通常电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。
该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。
当定子的矢量磁场旋转一个角度。
转子也随着该磁场转一个角度。
每输入一个电脉冲,电动机转动一个角度前进一步。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实用的步进电机驱动电路(图)实用的步进电机驱动电路(图)概述步进电机是一种将电脉冲转化为角位移的执行机构,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
目前,对步进电机的控制主要有由分散器件组成的环形脉冲分配器、软件环形脉冲分配器、专用集成芯片环形脉冲分配器等。
本设计选用第三种方案,用PMM8713三相或四相步进电机的脉冲分配器、SI-7300A两相或四相功率驱动器,组成四相步进电机功率驱动电路,以提高集成度和可靠性,步进电机控制框图见图1。
图1 步进电机控制系统框图硬件简介● PMM8713原理框图及功能PMM8713是日本三洋电机公司生产的步进电机脉冲分配器,适用于控制三相或四相步进电机。
控制三相或四相步进电机时都可以选择3种励磁方式,每相最小吸入与拉出电流为20mA,它不仅满足后级功率放大器的输入要求,而且在其所有输入端上均内嵌施密特触发电路,抗干扰能力强,其原理框图如图2所示。
图2 PMM8713的原理框图在PMM8713的内部电路中,时钟选通部分用于设定步进电机的正反转脉冲输入发。
PMM8713有两种脉冲输入法:双脉冲输入法和单脉冲输入法。
采用双脉冲输入法时,CP、CU两端分别输入步进电机正反转的控制脉冲。
当采用单脉冲输入时,步进电机的正反转方向由U/D的高、低电位决定。
激励方式控制电路用来选择采用何种励磁方式。
激励方式判断电路用于输出检测;而可逆环形计数器则用于产生步进电机在选定的励磁方式下的各相通断时序信号。
● SI-7300A的结构及功率驱动原理SI-7300A是日本三青公司生产的高性能步进电机集成功率放大器,该器件为单极性四相驱动,采用SIP18封装。
步进电机功率驱动级电路可分为电压和电流两种驱动方式。
电流驱动方式最常用的是PWM恒流斩波驱动电路,也是最常用的高性能驱动方式,其中一相的等效电路图如图3所示。
图3 LM331电压/频率变换电路● LM331芯片LM331是美国国家半导体公司生产的双列直插式8脚芯片,只需接入几个外部元件就可以方便地构成电压/频率(V/F)变换电路,电路如图4所示。
图4 四相步进电机功率驱动电路LM331的输出频率和输入电压存在如下关系:f0=Vi/(IRt1RL),其中t1由外接的定时元件Rt和Ct决定,t1=1.1RtCt,IR由内部精密电流源提供,IR=1.9V/RS。
故f0=ViRS/(2.09RtRLCt)。
RS为可调电阻,它的作用是调整LM331的增益偏差。
Ct为滤波电容,一般为 0.01~0.1μF,在滤波效果较好的情况下,可使用1μF的电容。
为了提高精度和稳定度,组容元件选用低温度系数的器件。
应用举例用PMM8713步进电机环形分配器与SI7300A步进电机功率放大器设计了一个四相步进电机功率驱动电路,PMM8713采取单脉冲输入、1-2相励磁方式,电路如图5所示。
图中PD控制端为SI7300A的输入电流I0调节端,可悬空或接高电平,接高电平时可适当提高SI7300A的输出电流I0,在本应用系统中悬空使用。
图中PMM8713的时钟脉冲输入信号由LM331(V/F)输出,方向控制信号和步进电机的起停信号由窗口比较电路给出。
图5 窗口比较电路窗口比较电路为步进电机提供方向控制信号和步进电机的起停控制信号,电路如图6所示。
其中,U1、U2为数控等离子切割机弧压的上、下限电压,Ui为检测到的弧压。
当Ui>U1,V3输出为高电平,V4输出为低电平,V5输出为高电平;当U2<Ui<U1,V3和V4输出均为高电平,V5输出为低电平;当Ui<U2,V3输出为低电平,V4输出为高电平,V5输出为高电平。
将V3输出或V4输出作为步进电机的方向控制信号,V5作为步进电机的起停控制信号。
脉冲控制信号由LM331输出信号提供。
方向控制信号V3或V4输出端接PMM8713的C/D,控制步进电机的正反转;U5输出端接PMM8713的复位端R,控制步进电机的起停。
LMM331(V/F)输出端f0接PMM8713的CK,为步进电机提供脉冲控制信号。
由此可见,当U2<Ui<U1时,V5输出为低电平,步进电机不运动;当Ui>U1或者Ui<U2时,V5输出为高电平,步进电机运动(步进电机的正反转由方向控制信号控制)至U2<Ui<U1的范围内,从而保证Ui始终位于U2<Ui<U1范围内。
结束语该驱动电路被用于数控等离子切割机弧压自动调高系统中,系统中的电机是42BYG009型混合式步进电机,驱动电压为直流24V。
通过实践证明该步进电机功率驱动电路控制系统结构简单、性能稳定、效率高、矩频特性好,可广泛应用于小型机电一体化设备中。
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:图2.步进电机工作时序波形图图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。
图中L1为步进电机的一相绕组。
AT89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
图3中的RL1~RL4为绕组内阻,50Ω电阻是一外接电阻,起限流作用,也是一个改善回路时间常数的元件。
D1~D4为续流二极管,使电机绕组产生的反电动势通过续流二极管(D1~D4)而衰减掉,从而保护了功率管TIP122不受损坏。
在50Ω外接电阻上并联一个200μF电容,可以改善注入步进电机绕组的电流脉冲前沿,提高了步进电机的高频性能。
与续流二极管串联的200Ω电阻可减小回路的放电时间常数,使绕组中电流脉冲的后沿变陡,电流下降时间变小,也起到提高高频工作性能的作用。
3.软件设计该驱动器根据拨码开关KX、KY的不同组合有三种工作方式供选择:方式1为中断方式:P3.5(INT1)为步进脉冲输入端,P3.7为正反转脉冲输入端。
上位机(PC机或单片机)与驱动器仅以2条线相连。
方式2为串行通讯方式:上位机(PC机或单片机)将控制命令发送给驱动器,驱动器根据控制命令自行完成有关控制过程。
方式3为拨码开关控制方式:通过K1~K5的不同组合,直接控制步进电机。
当上电或按下复位键KR后,AT89C2051先检测拨码开关KX、KY的状态,根据KX、KY 的不同组合,进入不同的工作方式。
以下给出方式1的程序流程框图与源程序。
在程序的编制中,要特别注意步进电机在换向时的处理。
为使步进电机在换向时能平滑过渡,不至于产生错步,应在每一步中设置标志位。
其中20H单元的各位为步进电机正转标志位;21H单元各位为反转标志位。
在正转时,不仅给正转标志位赋值,也同时给反转标志位赋值;在反转时也如此。
这样,当步进电机换向时,就可以上一次的位置作为起点反向运动,避免了电机换向时产生错步。
图4 方式1程序框图方式1源程序:MOV 20H,#00H ;20H单元置初值,电机正转位置指针MOV 21H,#00H ;21H单元置初值,电机反转位置指针MOV P1,#0C0H ;P1口置初值,防止电机上电短路MOV TMOD,#60H ;T1计数器置初值,开中断MOV TL1,#0FFHMOV TH1,#0FFHSETB ET1SETB EASETB TR1SJMP $;***********计数器1中断程序************IT1P: JB P3.7,FAN ;电机正、反转指针;*************电机正转*****************JB 00H,LOOP0JB 01H,LOOP1JB 02H,LOOP2JB 03H,LOOP3JB 04H,LOOP4JB 05H,LOOP5JB 06H,LOOP6JB 07H,LOOP7LOOP0: MOV P1,#0D0HMOV 20H,#02HMOV 21H,#40HAJMP QUITLOOP1: MOV P1,#090HMOV 20H,#04HMOV 21H,#20HAJMP QUITLOOP2: MOV P1,#0B0HMOV 20H,#08HMOV 21H,#10HAJMP QUITLOOP3: MOV P1,#030HMOV 20H,#10HMOV 21H,#08HAJMP QUITLOOP4: MOV P1,#070HMOV 20H,#20HMOV 21H,#04HAJMP QUITLOOP5: MOV P1,#060HMOV 20H,#40HMOV 21H,#02HAJMP QUITLOOP6: MOV P1,#0E0HMOV 20H,#80HMOV 21H,#01HAJMP QUITLOOP7: MOV P1,#0C0HMOV 20H,#01HMOV 21H,#80HAJMP QUIT;***************电机反转*****************FAN: JB 08H,LOOQ0JB 09H,LOOQ1JB 0AH,LOOQ2JB 0BH,LOOQ3JB 0CH,LOOQ4JB 0DH,LOOQ5JB 0EH,LOOQ6JB 0FH,LOOQ7LOOQ0: MOV P1,#0A0H MOV 21H,#02HMOV 20H,#40HAJMP QUITLOOQ1: MOV P1,#0E0H MOV 21H,#04HMOV 20H,#20HAJMP QUITLOOQ2: MOV P1,#0C0H MOV 21H,#08HMOV 20H,#10HAJMP QUITLOOQ3: MOV P1,#0D0H MOV 21H,#10HMOV 20H,#08HAJMP QUITLOOQ4: MOV P1,#050H MOV 21H,#20HMOV 20H,#04HAJMP QUITLOOQ5: MOV P1,#070H MOV 21H,#40HMOV 20H,#02HAJMP QUITLOOQ6: MOV P1,#030H MOV 21H,#80HMOV 20H,#01HAJMP QUITLOOQ7: MOV P1,#0B0H MOV 21H,#01HMOV 20H,#80HQUIT: RETIEND。