lin总线协议
汽车lin协议

汽车lin协议汽车LIN协议是一种在汽车电子系统中广泛使用的通信协议,它被设计用于连接车辆内部各种控制单元和传感器,实现它们之间的数据交换和通信。
LIN协议的全称是Local Interconnect Network,即局部互联网络,它在汽车电子系统中起着至关重要的作用。
首先,让我们来了解一下LIN协议的基本特点。
LIN协议是一种串行通信协议,采用单主从结构,其中一个主节点与多个从节点进行通信。
LIN总线的通信速率通常在19.2 kbit/s到20 kbit/s之间,属于低速通信协议。
由于LIN协议主要用于传输简单的控制信息和状态数据,因此适用于对通信速率要求不高的应用场景。
在汽车电子系统中,LIN协议主要用于连接各种传感器和执行器,例如车门控制单元、座椅控制单元、雨刮控制单元等,这些单元通常被称为LIN从节点。
主控制单元通常由汽车的中央控制器或者仪表盘控制单元扮演,它们通过LIN总线与各个从节点进行通信,实现对汽车各个功能的控制和监测。
LIN协议的通信消息采用帧的形式传输,包括同步域、标识域、控制域、数据域和校验域。
其中,同步域用于同步从节点的通信时钟,标识域用于标识消息的类型和发送者,控制域用于控制消息的发送和接收,数据域用于传输消息的实际数据,校验域用于校验数据的完整性。
通过这些域的组合,LIN协议能够实现可靠的数据通信和控制。
除了基本的通信功能,LIN协议还支持节点的诊断和配置,包括节点的在线配置、故障诊断和远程升级等功能。
通过LIN协议,汽车制造商能够实现对车辆各个电子系统的监测和管理,提高车辆的可靠性和安全性。
总的来说,汽车LIN协议是一种在汽车电子系统中广泛应用的通信协议,它具有通信速率低、成本低、可靠性高等优点,适用于连接各种传感器和控制单元,实现车辆内部各个功能的控制和监测。
随着汽车电子化的不断发展,LIN协议在汽车行业的应用前景将会越来越广阔。
lin总线协议简介二
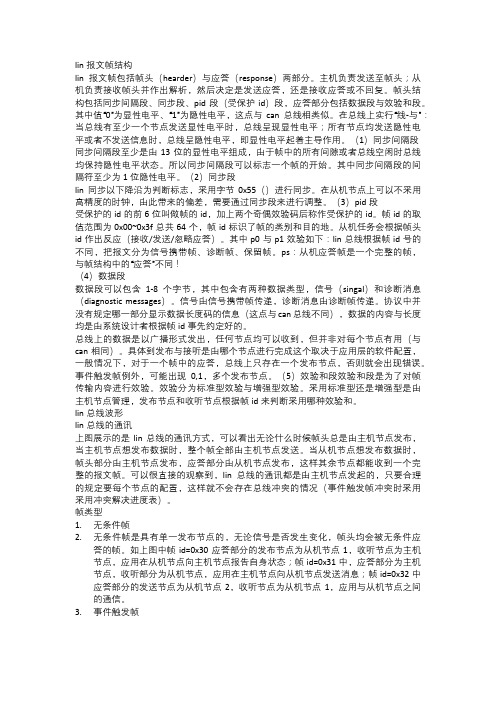
lin报文帧结构lin报文帧包括帧头(hearder)与应答(response)两部分。
主机负责发送至帧头;从机负责接收帧头并作出解析,然后决定是发送应答,还是接收应答或不回复。
帧头结构包括同步间隔段、同步段、pid段(受保护id)段,应答部分包括数据段与效验和段。
其中值“0”为显性电平、“1”为隐性电平,这点与can总线相类似。
在总线上实行“线-与”:当总线有至少一个节点发送显性电平时,总线呈现显性电平;所有节点均发送隐性电平或者不发送信息时,总线呈隐性电平,即显性电平起着主导作用。
(1)同步间隔段同步间隔段至少是由13位的显性电平组成,由于帧中的所有间隙或者总线空闲时总线均保持隐性电平状态。
所以同步间隔段可以标志一个帧的开始。
其中同步间隔段的间隔符至少为1位隐性电平。
(2)同步段lin同步以下降沿为判断标志,采用字节0x55()进行同步。
在从机节点上可以不采用高精度的时钟,由此带来的偏差,需要通过同步段来进行调整。
(3)pid段受保护的id的前6位叫做帧的id,加上两个奇偶效验码后称作受保护的id。
帧id的取值范围为0x00~0x3f总共64个,帧id标识了帧的类别和目的地。
从机任务会根据帧头id作出反应(接收/发送/忽略应答)。
其中p0与p1效验如下:lin总线根据帧id号的不同,把报文分为信号携带帧、诊断帧、保留帧。
ps:从机应答帧是一个完整的帧,与帧结构中的“应答”不同!(4)数据段数据段可以包含1-8个字节,其中包含有两种数据类型,信号(singal)和诊断消息(diagnostic messages)。
信号由信号携带帧传递,诊断消息由诊断帧传递。
协议中并没有规定哪一部分显示数据长度码的信息(这点与can总线不同),数据的内容与长度均是由系统设计者根据帧id事先约定好的。
总线上的数据是以广播形式发出,任何节点均可以收到,但并非对每个节点有用(与can相同)。
具体到发布与接听是由哪个节点进行完成这个取决于应用层的软件配置,一般情况下,对于一个帧中的应答,总线上只存在一个发布节点,否则就会出现错误。
lin 协议标准

lin 协议标准LIN(Local Interconnect Network)是一种局域总线通信协议,主要用于车辆电子系统中的低速数据通信。
它由德国汽车制造商BMW、Volkswagen、Volvo和DaimlerChrysler于1998年共同开发,旨在解决车辆电子控制模块之间的通信需求。
LIN协议被广泛应用于汽车领域,提供了一种廉价、简单和可靠的方式来连接车辆中的各个电子组件。
LIN协议是一种串行通信协议,使用单线传输数据和时钟信号,能够支持最多16个从节点和一个主节点。
从节点可以是各种不同的设备,例如温度传感器、调光模块、电动马达控制器等。
主节点负责控制整个通信过程,从节点则负责接收指令并发送响应。
LIN协议的特点之一是其低成本和简单性。
由于采用单线传输数据和时钟信号,只需要很少的硬件资源。
这使得LIN协议适用于需要大量从节点的应用场景,例如车辆的灯光控制和仪表板控制等。
此外,LIN协议的协议栈也比较简单,易于实现和调试。
另一个重要的特点是LIN协议的低速率。
LIN总线的最大传输速率为19.2kbps,远低于其他一些汽车通信协议,如CAN(ControllerArea Network)。
然而,对于车辆中许多简单的电子设备而言,19.2kbps的传输速率已经足够满足需求。
低速率可以减少通信噪声,提高系统的可靠性。
LIN协议还提供了一些重要的功能,以确保通信的可靠性和安全性。
其中之一是校验和机制,以防止数据传输过程中产生错误。
此外,LIN协议还支持诊断功能,可以通过发送特定的诊断命令来获取从节点的状态和信息。
这对于车辆的故障排除和维护非常有帮助。
为了满足不同应用场景的需求,LIN协议还有一些衍生版本。
其中最重要的是LIN 2.0和LIN 2.1。
这两个版本提供了更高的传输速率和更多的功能。
在现代汽车中,LIN协议被广泛应用于各种电子控制模块,例如发动机控制单元、仪表板控制单元、车门控制单元等。
LIN总线协议

LIN总线协议协议名称:LIN总线协议一、引言LIN总线协议是一种用于汽车电子系统中的串行通信协议,用于连接车辆内部的各种电子设备和控制模块。
本协议旨在规范LIN总线通信的物理层、数据链路层和应用层的规则和要求,以确保各种车辆电子设备之间的可靠通信和数据交换。
二、术语和定义1. LIN总线:指用于连接车辆内部电子设备和控制模块的串行通信总线。
2. 主节点:指LIN总线上负责控制和管理通信过程的节点。
3. 从节点:指LIN总线上被主节点控制的节点。
4. 帧:指在LIN总线上传输的数据单元,包括帧头、数据字段和校验字段。
5. 帧头:指帧中用于标识帧类型和发送方身份的字段。
6. 数据字段:指帧中用于传输实际数据的字段。
7. 校验字段:指帧中用于校验数据的字段,以确保数据的完整性和正确性。
8. 识别字段:指帧中用于标识从节点的身份的字段。
三、物理层规定1. 总线电压:LIN总线的电压范围为8V至18V。
2. 总线波特率:LIN总线的波特率范围为2400bps至20000bps。
3. 总线传输介质:LIN总线使用双绞线作为传输介质,线径为0.5mm至0.8mm。
4. 总线拓扑结构:LIN总线采用单主节点和多从节点的总线拓扑结构。
四、数据链路层规定1. 帧格式:LIN总线帧由帧头、数据字段和校验字段组成,帧头包括同步字段、标识字段和校验类型字段。
2. 帧同步:帧同步字段用于同步传输数据,其长度为13个比特。
3. 帧标识:标识字段用于标识帧类型和发送方身份,其长度为6个比特。
4. 帧校验:校验类型字段用于标识校验算法类型,其长度为3个比特。
5. 数据传输:数据字段用于传输实际数据,其长度可变,最大长度为8字节。
6. 校验算法:校验字段使用基于CRC的校验算法,以确保数据的完整性和正确性。
五、应用层规定1. 从节点识别:每个从节点在帧中的识别字段中有一个唯一的标识号,用于主节点识别从节点。
2. 帧类型:LIN总线支持不同类型的帧,包括数据帧、诊断帧和同步帧。
LIN总线协议
LIN总线协议协议名称:LIN总线协议一、引言LIN总线协议是一种用于低速串行通信的协议,主要用于汽车电子系统中的局域网络通信。
本协议旨在规定LIN总线通信的物理层和数据链路层的规范,以确保不同设备之间的可靠通信和数据传输。
本文档将详细介绍LIN总线协议的各个方面,包括总线结构、数据帧格式、通信速率等。
二、术语定义1. 主节点(Master Node):通过LIN总线发送命令和控制信息的节点。
2. 从节点(Slave Node):接收主节点发送的命令和控制信息的节点。
3. 总线(Bus):用于主节点和从节点之间的通信介质。
4. 帧(Frame):数据传输的基本单元,包含数据和控制信息。
5. 帧头(Header):帧的起始部分,包含同步字段、标识符等信息。
6. 帧数据(Data):帧的主体部分,包含要传输的数据。
7. 帧校验(Checksum):用于校验帧数据的完整性的校验值。
三、总线结构1. 物理层LIN总线采用单总线结构,使用双绞线连接主节点和从节点。
总线上的电压范围为0V至14V,其中0V表示逻辑低电平,14V表示逻辑高电平。
总线上的电压可以通过电压分压电路进行适配。
2. 数据链路层LIN总线采用主从结构,主节点负责发送命令和控制信息,从节点负责接收并执行命令。
主节点发送命令后,从节点会返回响应信息。
四、数据帧格式1. 帧结构LIN总线数据帧由帧头和帧数据组成,帧头包含同步字段、标识符等信息,帧数据包含要传输的数据。
帧头和帧数据之间使用校验位进行分隔。
2. 帧类型LIN总线定义了四种帧类型:同步帧、标识帧、数据帧和响应帧。
- 同步帧:用于同步主节点和从节点之间的时钟。
- 标识帧:用于标识数据帧的类型和发送者。
- 数据帧:用于传输数据信息。
- 响应帧:从节点在接收到数据帧后返回的响应信息。
3. 帧头格式帧头包含同步字段、标识符等信息,具体格式如下:- 同步字段:用于同步主从节点的时钟信号。
- 标识符:用于标识帧的类型和发送者。
lin通信协议 故障码

lin通信协议故障码LIN通信协议及故障码解析一、LIN通信协议1.1 LIN简介LIN(Local Interconnect Network)是一种低速串行总线,主要用于汽车电子系统中的次要设备,如门锁、后视镜、座椅调节器等。
该协议由欧洲汽车制造商联盟(European Automobile Manufacturers Association)于1999年发布。
1.2 LIN物理层LIN总线采用单线通信方式,即数据和电源共用一根线,称为LIN总线。
在总线两端分别连接一个电阻,称为终端电阻。
数据传输采用异步串行方式,波特率最高可达20kbps。
1.3 LIN帧格式LIN帧由同步域、标识符域、数据域和校验域组成。
其中同步域和标识符域固定长度,数据域和校验域长度可变。
1.4 LIN通信模式LIN通信模式包括主从模式和从从模式。
主从模式下,一个控制器作为主控制器向其他控制器发送命令;从从模式下,所有控制器都可以发送命令。
二、故障码解析2.1 故障码简介故障码是指汽车电子系统中出现的错误代码。
当系统发生故障时,相应的传感器或执行器会向控制器发送故障码,控制器将故障码存储在故障存储器中。
通过读取故障存储器中的故障码,可以判断系统哪个部分出现了问题。
2.2 故障码类型根据SAE J2012标准,故障码分为四种类型:P、C、B和U码。
P码(Powertrain):指动力总成相关的故障,如发动机、变速箱等。
C码(Chassis):指底盘相关的故障,如制动系统、转向系统等。
B码(Body):指车身相关的故障,如门锁、电动窗等。
U码(Network):指网络通信相关的故障,如CAN总线、LIN总线等。
2.3 故障码解析方法读取车辆的OBD(On-Board Diagnostics)接口,并使用诊断仪读取车辆中存储的故障码。
根据故障码类型以及具体含义进行判断和修复。
常见的修复方法包括更换零部件、清除存储器中的故障码等。
LIN总线协议

LIN总线协议协议名称:LIN总线协议一、引言LIN(Local Interconnect Network)总线协议是一种用于车辆电子系统中的串行通信协议,旨在提供低成本、低复杂度的通信解决方案。
本协议旨在规范LIN总线的通信规则、物理层特性、帧格式以及错误处理机制,以确保各个节点之间的可靠通信。
二、术语定义1. 主节点(Master Node):LIN总线上的主控节点,负责发送命令并控制从节点的行为。
2. 从节点(Slave Node):LIN总线上的被控节点,接收主节点的命令并执行相应的操作。
3. 帧(Frame):LIN总线上的数据传输单位,由同步字节、标识字节、数据字节和校验字节组成。
4. 帧ID(Frame ID):用于标识帧的唯一标识符,由主节点分配给从节点。
5. 帧类型(Frame Type):用于指示帧的类型,包括数据帧、远程帧和响应帧。
三、物理层特性1. 通信速率:LIN总线的标准通信速率为19.2 kbps,也可以根据实际需求选择其他速率。
2. 总线电压:LIN总线采用5V的电压级别,允许的电压范围为4.75V至5.25V。
3. 总线电流:LIN总线的总线电流应根据实际应用需求进行设计,一般不超过40mA。
四、帧格式1. 同步字节:用于同步主节点和从节点的时钟信号,固定为0x55。
2. 标识字节:用于标识帧的类型和帧ID,由主节点发送给从节点。
- Bit 7:帧类型(0表示数据帧,1表示远程帧)- Bit 6-0:帧ID(从0至63,由主节点分配给从节点)3. 数据字节:用于传输实际的数据内容,最多可包含8个字节。
4. 校验字节:用于检测数据传输过程中的错误,采用标准的CRC校验算法。
五、通信规则1. 主节点发送数据帧:- 主节点发送同步字节(0x55)以同步时钟信号。
- 主节点发送标识字节,包括帧类型和帧ID。
- 主节点发送数据字节,传输实际的数据内容。
- 主节点发送校验字节,用于检测传输过程中的错误。
lin总线协议标准

lin总线协议标准LIN(Local Interconnect Network)总线协议是一种低成本、低速率、低复杂度的串行通信协议,主要应用于汽车电子系统中。
LIN总线协议的起源可以追溯到上个世纪90年代,由德国汽车公司Volkswagen AG和电子公司VDO开发。
它最初的目的是为了在汽车电子系统中替代更为复杂和昂贵的CAN (Controller Area Network)总线协议。
LIN总线协议的特点是适用于简单控制任务,如车内温度控制、窗户升降等,并且可以使用低成本的组件实现。
在LIN总线协议中,一台主控单元(Master)可以连接多台从属单元(Slaves)。
主控单元负责发送指令给从属单元,而从属单元只负责接收指令并执行相应的操作。
这种主从结构的通信方式可以提高系统的稳定性和可靠性。
LIN总线协议的物理层使用单一的数据线和一根地线进行通信。
数据传输采用了主从同步方式,在主控单元发送数据时,从属单元会按照特定的时序接收数据。
此外,LIN总线还提供了标准的电压和数据速率,以便于不同供应商的设备进行兼容和互操作。
LIN总线协议的数据链路层定义了数据包的格式和传输方式。
每个数据包由一个起始位、若干数据位、校验位和一个结束位组成。
起始位用于同步通信的时钟,数据位存储实际的数据信息,校验位用于验证数据的完整性,结束位标识数据包的结束。
通过这些机制,LIN总线协议可以实现可靠的数据传输,并提供了错误检测和纠正的功能。
在软件层面,LIN总线协议使用基于事件的通信方式。
主控单元通过向从属单元发送特定的命令和数据来触发事件。
从属单元在接收到命令后,执行相应的操作,并返回结果给主控单元。
这种基于事件的通信方式可以提高系统的实时性和可扩展性。
在应用层面,LIN总线协议定义了一套丰富的应用层协议和命令,例如LIN Configuration Protocol(LCP)、Diagnostic Class 1、and Supplier Identifications。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
lin总线协议
LIN(Local Interconnect Network)总线协议是一种用于连接车辆内部电子设备的串行总线协议。
它是由德国大众汽车集团于1999年提出的,旨在成为CAN总线的低成本替代方案。
LIN 总线协议主要用于汽车电子系统中的低速数据通信,如车身电子系统、底盘控制系统等。
LIN总线协议的主要特点是低成本、低速率和低复杂度。
相对于CAN总线协议而言,LIN总线协议的硬件和软件实现更加简单,成本较低。
它的通信速率一般在19.2kbit/s到20kbit/s 之间,远低于CAN总线的通信速率。
这是因为LIN总线主要用于传输简单控制信息,如开关状态、传感器数据等。
因此,低速率能够满足这些基本通信需求。
在LIN总线协议中,有两种主要的设备类型:主节点和从节点。
主节点负责总线的控制和协调,他们可以发送消息并且控制从节点进行相应的操作。
从节点则是被动的设备,它们接收来自主节点的消息并执行相应的操作。
在LIN总线上,最多可以有16个从节点。
LIN总线协议采用了主从结构,主节点负责发送消息并控制总线的抢占,而从节点则负责接收消息并执行操作。
在通信过程中,主节点发送一个帧头包含消息的标识符,然后从节点根据这个标识符来确定自己是否需要响应。
如果需要响应,从节点会回复一个数据包,然后主节点会再次回复一个应答包来确认数据接收。
在整个过程中,主节点和从节点之间的通信是按照固定的顺序进行的,以确保通信的顺序和安全性。
LIN总线协议还提供了一种错误检测和纠正的机制,以确保通信的可靠性。
它使用了奇偶校验和位寄存器来检测和纠正传输中的错误。
如果在传输过程中发现数据错误,接收设备会向发送设备请求重新发送数据。
这种机制可以有效地防止数据丢失和传输错误。
总的来说,LIN总线协议作为一种低成本、低速率、低复杂度的串行总线协议,已经得到了广泛的应用。
它适用于车辆电子系统中的低速数据通信,如车身电子系统、底盘控制系统等。
它的简单实现和可靠的通信机制使得它成为了汽车电子系统中重要的数据交换方式。
随着汽车电子技术的不断发展,LIN总线协议将继续发挥重要的作用,并不断改进和完善。