基于内模控制的PID控制系统的研究与应用
根据内模基本知识的PID控制控制控制控制器参数整定仿真实验

基于内模原理的PID控制器参数整定仿真实验1.内模控制内模控制器(IMC)是内部模型控制器(Internal model controller)的简称,由控制器和滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性能,后者影响系统的鲁棒性。
它是一种实用性很强的控制方法,其主要特点是结构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。
特别是对于鲁棒及抗扰性的改善和大时滞系统的控制,效果尤为显著。
因此自从其产生以来,不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得了比PID更为优越的效果。
IMC设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视内模控制( Internal Model Control IMC ) 是一种基于过程数学模型进行控制器设计的新型控制策略。
其设计简单、控制性能良好,易于在线分析。
它不仅是一种实用的先进控制算法,而且是研究预测控制等基于模型的控制策略的重要理论基础,也是提高常规控制系统设计水平的有力工具。
值得注意的是,目前已经证明,已成功应用于大量工业过程的各类预测控制算法本质上都属于IMC类,在其等效的IMC结构中特殊之处只是其给定输入采用了未来的超前值(预检控制系统),这不仅可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析和改进提供了有力的工具。
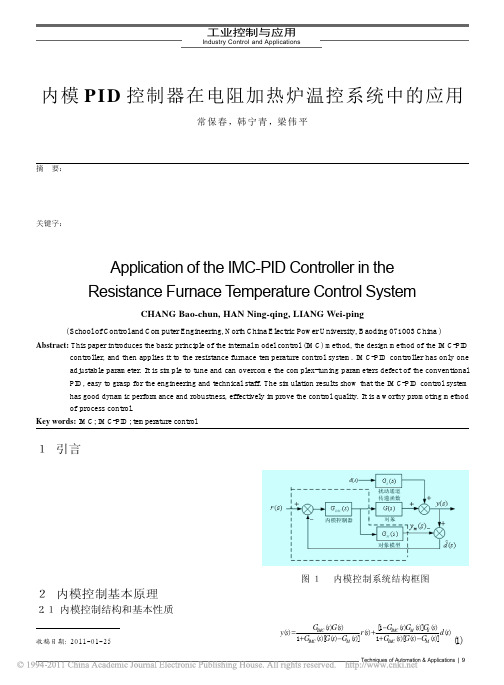
内模控制的结构框图如图1:图1-1 内模控制的结构图其中,IMC G —内模控制器;p G —实际被控过程对象;m G —被控过程的数学模型; d G —扰动通道传递函数。
(1)当0)(,0)(≠=s G s R d 时,假若模型准确,即)()(s G s G m p =,由图可知,)]()(1)[()]()(1)[()(IMC IMC s G s G s G s G s G s G s Y m d d -=-=p ,假若“模型可倒”,即)(1s G m 可以实现,则可令)(1)(IMC s G s G m =,可得0)(=s Y ,不管)(s G d 如何变化,对)(s Y 的影响为零。
基于闭环辨识的鲁棒内模PID优化整定及应用的开题报告

基于闭环辨识的鲁棒内模PID优化整定及应用的开题报告1. 研究的背景和意义PID控制是一种常见的自动控制方法,具有简单易用、可靠性高等优点,在各领域得到广泛应用。
然而,PID控制器的调整需要根据具体应用场景的特点来进行,这使得传统的PID控制往往难以满足复杂系统的高性能控制要求。
因此,如何对PID控制器进行精准调整,以实现系统动态响应性能和鲁棒性能的平衡,一直是控制领域的研究热点之一。
近年来,基于闭环辨识的鲁棒内模PID控制方法成为其中的一个重要研究方向。
该方法通过在控制器内部嵌入一个模型来加强控制器的鲁棒性能,同时利用闭环辨识技术对系统参数进行估计和补偿,使得控制器在动态性能和鲁棒性能上达到一个较好的平衡。
因此,对该方法进行深入研究,实现其在实际控制系统中的应用具有重要的理论意义和工程应用价值。
2. 研究的内容和思路本文将从以下几个方面开展研究:(1)闭环辨识技术的研究:对现有的闭环辨识方法进行综合分析和比较,确定适合本文研究的闭环辨识方法,并进行仿真验证。
(2)内模控制器的设计:在闭环辨识的基础上,设计内模控制器的结构和参数,并进行仿真和实验验证。
(3)鲁棒性能的分析和优化:分析内模控制器的鲁棒性能,并提出相应的优化方法,在平衡动态性能和鲁棒性能的基础上实现内模PID控制器的优化整定。
(4)应用于实际系统的验证:将所设计的内模PID控制器应用于实际系统中,对其控制性能进行实验验证,并与常用的PID控制器进行比较。
3. 研究的预期成果本文将实现基于闭环辨识的鲁棒内模PID控制器在实际控制系统中的应用,达到以下预期成果:(1)提出一种具有较好鲁棒性能和动态响应性能平衡的内模PID控制器设计方法,为实际控制系统的设计提供参考和借鉴。
(2)分析和验证内模PID控制器的鲁棒性能,并推导相应的鲁棒性能分析公式和优化方法,为内模PID控制器的进一步研究提供理论基础。
(3)通过对实际系统的控制实验验证,证明所设计的内模PID控制器在控制性能上具有优异的表现,为其在实际应用中推广应用提供参考。
内模PID控制器在云台伺服系统中的应用
主要用于动态摄像 、 安全监控等需要进行运动图像( 视 频) 捕捉的环境或场合, 使采集方式更加直接、 方便, 获
取 的信息内容也更加 丰富 , 在视频 跟踪系统 中得 到 广泛应用。图 1 为二 自由度云台结构简图。 如 图 1所 示 , 台 旋 转 平 台机 构 位 于 系 统 底 云 部 , 以水平 方 向绕 z轴 旋 转 ; 俯 机 构 位 于 水 平 可 仰 旋转 结构 的上 部 , 以 在 Z 或 Z 可 X Y平 面 内仰 俯 转
10 , 1 。 输入 电压 D 2 重 量 2 1k . C 4V, . g
云 台的驱 动 方式 一 般采 用 步进 电机 和伺 服 电 机驱 动 。考 虑到 步进 电机 多 用 于开 环控 制 , 只能采 用位 置控制 方 式 , 速 能 力 有 限 , 不 具 备 过 载 能 调 且 力, 因此选 择 了控 制精 度 高 , 速 能力 好 , 调 且能 方便 实现 位置 、 度 闭 环 控 制 的直 流 伺 服 电 机 进 行 驱 速 动 。根据 云 台参 数 , 两个 电机 均 选择 了额 定 电压 为 2 输 出功率 为 4 5w , 定 负载转 速为 4 / n 4V, . 额 5rmi
第3卷 3
第2 期
太
原
科
技
大
学
学
报
V 1 3 N . o 3 o2 .
A r2 1 p. 0 2
21 0 2年 4月
J U N L O A Y A N V R IY O C E C N E HN L G O R A FT I U N U I E ST F S I N E A D T C O O Y
l6 0
太
原
科
技
内模PID控制器在电阻加热炉温控系统中的应用
当模型匹配时, 即当 GM (s) = G(s) , 通过调整参数 Tf 即可得到满意的控制效果, 如图 3 所示为 Tf 分别取 0 . 7 5 τ 、1 . 7 5 τ 、2 . 7 5 τ 时的仿真曲线, 可知当取 Tf =1.75 τ 时可以兼顾稳定性和快速性。
将内模 PID 控制与传统的 PID 控制和 Smith 预估补
采用传统 Z - N 整定法的 P I D 控制已经是发散振荡的, Smith 补偿 PID 控制超调量过大,调节时间也较长,而内 模 PID 控制仍能达到满意的控制效果,说明内模 PID 控 制具有很强的鲁棒性。
基于内模的过热汽温串级控制系统PID参数整定
收 稿 日期 :2016—03—25
影 响过 热器 出 口蒸汽温度变化的 因素很 多 ,如蒸汽流量 (负荷)、给水温度 、给水流量 、过量空气系数 、烟气温 度、减温
—
86 一
水流量 、燃料 量 、燃料种 类 、受热面 污染情况 、火焰 中心 位置
ABSTRACT:A PID controller design method (IMCPID)f or superheated steam temperature cascade control system
based on the internal m odel principle is presented. The presented PID controller is very simple,in which only one
PID param eter setting of superheated steam tem perature cascade control system Based on internal m odel Principle
HU W en—bin .HAN Pu .LIU M iao (1.Guangdong Yudean Group Co.,Ltd.,Guangzhou Guangdong 5 10630,China;
1 引 言
PID控制器是工业过 程中最 主要使 用的一种 调节器 ,它 结构 简单 ,易 于操 作 ,且鲁棒 性强 ,实用 效果很好 ,但 对其 参 数 的调节却 没有 那么简单。
文献 [2]提 出一 种基 于谱 离 散方 法 的 PID参 数整 定方 法 。该方法 不需 要对多 重时 滞对 象进行 模型 约简 即可进 行 整定 ,简单方便 ,整定效 率高 。文献 [3]提 出了一种 自适 应 遗 传算 法的 PID参 数整定算法 ,通过 自适应 遗传算法 对 PID 参数进 行整定与寻优。文献 [4]提 出了一种新 的分数 阶微 积 分数字 实现算法一最 优 Oustaloup数字 实现 ,该算 法 在频 率 段 内能更高精度的实现分数 阶微积分 。文献 [5]针对一 大类 开环稳 定的最小和非最小相位系统 ,给 出了一 种 PID控 制器 参数整定的新方法 。本文讨 论 的基 于内模原 理 的 PID控 制
内模PID控制污水PH的设计与应用

内模 PID控制污水 PH的设计与应用Apply and design on PH control of sewage by IMC PID1.内容摘要面对国内用水紧张以及水污染严重的现状,采取有效措施对污水进行处理已经成为亟待解决的难题。
污水处理涉及到多个复杂控制过程,PH值中和反应是其中非常重要的过程之一,PH值对其它出水指标有着重要影响,它的稳定控制将直接影响污水处理整个过程是否达标。
为此,报告中提出了PH值中和过程的内模PID的控制策略。
由于污水处理现场中和反应过程中,PH值的控制具有强非线性、大滞后性、不确定性以及鲁棒性差的特点,本文针对以往单闭环PID对PH值的控制品质存在不足,提出将内模控制策略应用在污水处理PH值中和过程,设计内模PID控制器来稳定调节PH值。
为了验证所设计控制器的可行性,利用软件仿真与实验,与常规的控制方式从多个方面进行分析对比,内模PID控制能够明显的改善被控对象的目标值跟踪特性,提高抑制干扰能力,系统的动态特性可以很好的满足。
即使发生模型失配,也能实现很好的控制。
并且能够减少参数调整的个数,结构设计上也算简单。
利用软件进行仿真与实验,结果表明,该方法可以更好的改善控制系统的性能。
1.正文1.内模PID算法1.内模控制的原理上世纪八十年代,Garcia和Morari两位学者经过长时间的研究复杂对象的控制过程,全面分析多变量、非线性、时变的对象模型,结合史密斯预估计控制策略,系统的向世人阐述了一种全新的控制方法,这就是内模控制方法。
依据被控对象的数学模型, 经过简单有效的设计步骤,就可以设计出针对实际被控对象的内模控制器,用该控制器对被控对象进行控制,可以提高系统动态变化的跟踪能力,获得良好的控制效果,实用性也特别强,同时对外界的强干扰也有很好的抑制效果。
虽然PID就能解决自动化生产中很多的控制问题,但常规的PID控制很难有效的控制具有非线性、大滞后性、多变量耦合的复杂系统。
内模PID控制器在无刷直流电机调速系统中的应用

关键词 : I 控制 ; PD 内模 控 制 ; — I 控 制 ; 闭环 直 流 电机 ; 速 系统 I MC P D 双 调 中 图分 类号 : P 7 T 2 文献标识码 : A 文章 编 号 :1 7 — 2 6 2 1 )2 0 4 — 4 6 4 6 3 (0 2 1— 0 2 0
c re p n i g r lt n h p o h n e n l mo e o t l a d t e ca s I o r s o d n ea i s i f t e i tr a d lc n r n h l s i P D,c mb n s t e r a v n a e ,d sg s a P D o o c o i e h i d a tg s ein I
流 电机 进 行 调 速 。在 建 立 对 象理 论 模 型 的基 础 上 , 过 对 控 制 器 在 线 仿 真 比较 表 明 : 对 本 设 计 对 象 , 于 内部 模 型 通 针 基 的 PD控 制 器 不 论在 系统 阶 跃 响 应 或 是 扰 动 跟 踪 等 控 制 效 果 上 都 能 到 达 经 典 PD控 制 的 要 求 , I I 同时 还 降低 了 参 数 设
t ec mp e i n a d mn s f ep r mee sd sg . h o l xt a d r n o e so aa tr e in y h t Ke r s P D o to ;i tr a d l o to ;it r a d lc n rlP D;d u l — o C mo o ;s e d s s m y wo d : I c n r l n e n lmo e n r l n e l mo e o to— I c n o bel p D tr p e yt o e
论文基于内模控制的PID在过程控制中的应用研究

论文基于内模控制的PID在过程控制中的应用研究毕业设计报告(论文)基于内模控制的PID在过程控制中的应用研究所属系化工与制药工程系专业化学工程与工艺学号06110341姓名王大林指导教师陈夕松起讫日期2014.1---2014.5设计地点东南大学四牌楼校区动力楼119东南大学成贤学院毕业设计报告(论文)诚信承诺本人承诺所呈交的毕业设计报告(论文)及取得的成果是在导师指导下完成,引用他人成果的部分均已列出参考文献。
如论文涉及任何知识产权纠纷,本人将承担一切责任。
学生签名:日期:基于内模控制的PID在过程控制中的应用研究摘要内模控制是基于过程数学模型而进行控制器设计的一种新型控制策略。
内模控制具有很多优点,如设计简单,控制性能好,性能分析优越等。
随着工业过程自动化的普及,过程控制越来越受到控制界的广泛关注。
内模控制就是其中之一,它是以控制内部数学模型为基础,通过控制内部模型来达到控制整个系统稳定,进而达到工业过程生产指标的要求。
所以内模控制不仅是一种先进的控制算法,而且是研究预测控制模型的控制策略的重要理论基础!本论文基于东南大学过程控制实验室HGK-1型过程控制实验平台,以该平台中的液位过程为研究对象,设计基于可编程序控制器(PLC)的过程控制系统,采用内模控制(IMC)算法,仿真并实验研究IMC在该过程中的应用效果。
通过本次学习掌握IMC原理及算法,为以后在工作中的工程实际应用打下良好的铺垫!论文在介绍了HGK-1型过程控制实验平台后,阐述了液位过程建模的方法和特点。
在机理建模,试验建模和混合建模中选用试验建模方法建立了被控过程的数学模型。
设计液位过程PLC控制系统,包括液位计、流量计、调节阀、PLC输入/输出模块的接线,以及与PC机间的通讯连接。
仿真比较了IMC-PID控制及IMC的动态与静态性能。
为进一步提高控制系统的动静态性能,设计采用串级IMC控制方案,既提高了系统的动态特性,又保证了系统的稳态精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
因此应用IMC.PID软件包实施先进控制,首先就是要在保证生产平稳运行的情况
图5.6辨识的对象模型参数及整定后的控制器PID参数
Fj昏S-61demified mOdel par锄ners and retIlning HD p啦meters
在有条件的情况下,实施IMC.PID控制;为了应用IMC.PID鲁棒控制器,需要对现场的Dcs控制回路重新组态。将原来的PID算法修改为PI算法,再串一个超前滞后环节。由第二章内模控制器的求取方法可知,IMC回路只需求解一个滤波器常数就可满足回路的设定值响应特性,同时又能保证系统的鲁棒性。以0—1的阶跃信号为输入并以ITAE为准则,使用NIJ算法进行滤波器常数的辨识。
.参考文献
2.陶永华.尹怡欣.葛芦生新型PID控制及其应用 1999
3.王鹤曾工业过程PID控制器的设计与性能评价研究[学位论文]硕士 2004
4.Garcia C E.Morari M Internal Model Control.1.A Unifying Review and Some New Results 1982
9.李全善催化裂化装置先进控制的研究与应用[学位论文]硕士 2004
10.潘立登.聂雪媛.马俊英常减压蒸馏装置监控先进控制和优化控制[期刊论文]-石油化工自动化 2001(6)
11.龚剑平.游浩.潘立登应用改进的滤波器增强内模控制系统的抗干扰能力 1999(zk)
12.王树青.金晓明.荣冈先进控制技术及应用第一讲 工业生产过程的先进控制[期刊论文]-化工自动化及仪表1999(2)
40.张井岗.吴聚华.曾建潮模型参考自适应内模控制及其仿真研究[期刊论文]-系统仿真学报 1997(2)
41.Hu Qiuping.Gade Pandu Rangaiah Adaptive internal model control of nonlinear processes[外文期刊] 1999
13.黄晓峰气体分馏装置先进控制与优化[学位论文]硕士 1996
14.金以慧生产过程的先进控制 1997(04)
15.薛美盛.吴刚.孙德敏.王永工业过程的先进控制[期刊论文]-化工自动化及仪表 2002(2)
16.孙德敏.吴刚.薛美盛.王永.李俊工业过程先进控制及优化软件产业[期刊论文]-自动化博览 2003(2)
在实施对某石化厂的丙烯腈装置进行先进控制改造时发现,由于两次扩能改造,使得一些仪表已经打到满量程,部分控制回路发散,控制不住,波动比较大,以至于大部分回路处于手动状态,失去了“自动控制”的意义。并且,由于手动操作对操作工操作经验的要求很高,操作工在遇到大的扰动时,不敢做太大的调整,使得很多位号在遇到干扰时不能很快恢复到位,有的位号很可能就一直振荡下去,造成了生产的不稳定。这也在某种程度上增加了误操作率。
5.2小结
由于IMc的设计简单、跟踪调节性能好、鲁棒性强,能消除不可测干扰的影响,孙鑫”“、郑思让㈣在造纸过程中应用IMc表明:IMC用于造纸生产具有算法结构简单、易于工程实现、自适应能力强、实时眭好等特点。袁树清删等应用玎讧c到机构
基于内模控制的PID控制系统的研究与应用
作者:黄静
北京化_:::I:大学硕士学位论文
图5—7滤波器常数及IMc-PlD控制器参数的整定曲线
Fi晷s_7Finer p棚eters and retuning curve oflM(>PID connDller
从实际应用结果对比可知,基于阶跃响应的PID控制回路经参数优化后,控制回路的性能指标和鲁棒性得到明显提高。该方法鳃决了PID参数只能凭经验进行调节,而一般人员很难进行精细调节的难题。并且该方法的数据获取容易,因为在正常生产中控制回路的设定值改变是时有发生的,而设定值变化前后的数据就是本方法所需数据,故本方法不需要为PID参数做特定的闭环对象特性测试实验;其次方法操作简单, Dcs操作员经简单培训就可进行,没有特殊的维护工作量,且优化后系统的鲁棒性很好。
Fig.5—2FlOw chan ofT-104recycle tower
5.1.4应用IMc.PID软件包实施先进控制
对于一个化工装置而言,实现操作优化和先进控制,使装置在最优操作条件下平稳运行,可以从提高产品质量、增加产品产量、降低原料消耗、节约能源、延长催化剂使用寿命、减少环境污染等多方面取得经济效益。
21.王文新常压蒸馏装置的在线优化控制[学位论文]硕士 1998
22.舒迪前预测控制系统及其应用 1996
23.任何生现代控制理论及应用 1992
24.汪波内模等效预估PI控制器及其参数模糊自整定[学位论文]硕士 2002
25.赵曜内模控制发展综述[期刊论文]-信息与控制 2000(6)
26.Takamatsu T S.Shioya Yokada Adaptive internal model control and its application to a batch polymerization reactor 1985
30.S G Cao.N W Rees.G Feng Analysis and design for a class of complex control systems part 1:Fuzzy modeling and identification 1997(06)
31.Wen Fang Me.A BRad Fu1zzy adaptive internal model control 2000(01)
17.薛兴昌工业自动化系统的技术发展[期刊论文]-自动化博览 2003(z1)
18.常青.胡红页先进控制技术在炼油化工行业的应用[期刊论文]-自动化与仪表 2003(5)
ughlin D L.Rivera D E.Morari M Smith Predictor Design for Robust Performance 1987(02)
20.Hannh T.Toivonen Kati.V Sandstr(O)m Rasmus.H.Nystr(O)m Internal model control of nonlinear systems described by velocity-based linearizations[外文期刊] 2003(13)
北京化工大学
硕士学位论文
基于内模控制的PID控制系统的研究与应用
姓名:黄静
申请学位级别:硕士
专业:控制理论与控制工程
指导教师:潘立登
20060601
北京化工大学硕士学位论文
图5—2T—104回收塔流程图
42.Xie W F.Rad A B.Wang Y K Evaluation of A Hybrid Fuzzy Internal Model Control 1997(03)
43.杨智.贾立基于神经网络的时滞系统自适应内模控制[期刊论文]-模式识别与人工智能 2000(3)
5.Garcia C E.Morari M Internal Model Control.2.Design Procedure for Multivariable Systems 1985
6.Garcia C E.Morari M Internal Model Control.3.Multivariable Control Law Computaiton and Tuing Guidlines 1985
5.1.6其它丙烯赌装置上的先进控制改造
薛美盛等人”21在丙烯腈装置上利用优化软件改变操作条件,也就是改变控制回路的设定值,成功实现了流化床反应器操作条件的正交优化,在此基础上,又在多元逐步回归分析法的基础上实现了丙烯腈反应器的在线优化控制。
李永刚等人㈣将主元分析处理后的数据作为新的样本输入,利用模糊C均值聚类算法进行丙烯腈反应器的优化操作。
7.Rivera D E.Morari M.Skogestad S Internal model control,Part4,PID controler design 1986(01)
8.Morari M.Skogestad S.Rivera D E Implications of Internal Model Control for PID Controllers 1984
34.陈悦.安燮南.高东杰一种统一预测控制及其内模结构分析 1997
35.吴玮琦.席裕庚.耿晓军广义预测控制的鲁棒化改进[期刊论文]-控制与决策 1999(6)
36.马俊英.罗元浩.潘立登用改进的NLJ方法辨识闭环系统的模型参数及滤波器设计[期刊论文]-北京化工大学学报(自然科学版) 2003(4)
优化和先进控制已经发展得比较成熟,但国内外绝大多数丙烯腈装置都还没有实施优化和先进控制。另外,国内丙烯腈装置基本上都已经使用了分散控制系统,这给优化与先进控制的实施提供了强有力的技术保障。
PID控制回路正常工作是保证生产装置安全、平稳、长周期、满负荷运行的基础,同时也是采用先进过程控制、操作优化、质量管理、节能策略的基础。
11AE,即时间乘绝对误差的积分,按ITAE准则设计的最优系统是使积分具有最小值的系统,由于IrIAE具有较好的选择性,在P1D参数整定时,选择ITAE。
通过实际应用中发现,虽然Dcs控制回路的PID控制器经过IMc改造成为lMc.PID 控制器,但新控制器传递函数的阶次与IMC控制器的阶次一般不相等,即使出现阶次相等,使用对应系数相等的方法进行PID控制器求解时,也会出现无解或多重解的情况。研究前人的求解过程,发现一些文献直接舍去了IMc控制器的高次项而变成与PID 控制器相同的阶次,但这样做的结果就可能影响到PID回路的设定值响应特性或降低系统的鲁棒性,并且PID控制器的推导求解过程同PID控制回路的闭环传递函数的推导过程一样繁琐且容易出错。