哈工大版理论力学复习
理论力学期末复习(哈工大第一~第五章)PPT课件

几个基本概念
刚体:在力的作用下,其内部任意两点间的距离始终 保持不变的物体.
力:物体间相互的机械作用,作用效果使物体的机械
运动状态发生改变.
力的三要素:大小、方向、作用点
力是矢量.
力系:一群力.
平面汇交(共点)力系 平面平行力系 平面力偶系 平面任意力系
空间汇交(共点)力系 空间平行力系 空间力偶系 空间任意力系
刚体(受压平衡)
柔性体(受压不能平衡) 24
思考
只适用于刚体的公理有哪些? 二力平衡条件和加减平衡力系公理
25
Байду номын сангаас
§1-2 约束和约束力
约束:对非自由体的位移起限制作用的物体. 约束力:约束对非自由体的作用力.
大小——待定
约 束
方向——与该约束所能阻碍的位移方向相反
力 作用点——接触处
26
工程中常见的约束 1、具有光滑接触面(线、点)的约束(光滑接触约束)
理论力学绪论
1
整体概况
概况一
点击此处输入 相关文本内容
01
概况二
点击此处输入 相关文本内容
02
概况三
点击此处输入 相关文本内容
03
2
航空航天技术
力学
材料
Aerospace
制造
新能源
信息
3
应用实例
• 卫星主承力筒与太阳 帆板基板
– 模态响应 – 屈曲失稳 – 损伤容限 – 连接强度
4
应用实例
• 固体火箭发动机
分析、归纳和总结 观察和实验
力学最基本规律
抽象、推理和数学演绎
理论体系
用于实际
力学模型
刚体、质点、弹簧质点、弹性体等
理论力学复习试题和答案(哈工大版)
C :作用于质点系的约束反力主矢恒等于零; D:作用于质点系的主动力主矢恒等于零;
..
..
6、 若作用在 A 点的两个大小不等的力 F 1 和 F 2,沿同一直
反。则其合力可以表示为
③
。
① F 1- F 2; ② F 2- F 1; ③ F 1+ F 2;
7、 作用在一个刚体上的两个力 F A、 F B,满足 F A=- F B 的条件,则该二力可能是②
( √) (× )
14、 已知质点的质量和作用于质点的力,质点的运动规律就完全确定。
(× )
15、 质点系中各质点都处于静止时,质点系的动量为零。于是可知如果质点
系的动量为零,则质点系中各质点必都静止。
(×)
16、 作 用 在 一 个 物 体 上 有 三 个 力 , 当 这 三 个 力 的 作 用 线 汇 交 于 一 点 时 , 则 此 力 系 必 然 平 衡 。
..
..
..
..
2、图示平面结构,自重不计。 求支座 A 的约束反力。
B 处为铰链联接。已知: P = 100 kN , M = 200 kN · m, L1 = 2m , L2 = 3m 。试
3、 一 水平 简支梁 结 构, 约 束和载 荷如 图 所示 , 求支座
q A
D
M B
E
P C
A和
B 的约束反力。
一、 是非题
1、 力 有 两 种 作 用 效 果 , 即 力 可 以 使 物 体 的 运 动 状 态 发 生 变 化 , 也 可 以 使 物 体 发 生 变 形 。
( √)
2、 在理论力学中只研究力的外效应。
( √)
3、 两端用光滑铰链连接的构件是二力构件。
(完整版)哈工大版理论力学复习

第一章静力学的基本概念与公理一、重点及难点1.力的概念力是物体间的相互机械作用,其作用效果可使物体的运动状态发生改变和使物体产生变形。
前者称为力的运动效应或外效应,后者称为力的变形效应或内效应。
力对物体的作用效果,取决于三个要素:①力的大小:②力的方向;⑧力的作用点。
力是定位矢量。
2.刚体的概念所谓刚体,是指在力的作用下形状和大小都始终保持不变的物体;或者说,刚体内任意两点间的距离保持不变。
刚体是实际物体抽象化的一种力学模型。
3.平衡的概念在静力学中,平衡是指物体相对惯性坐标系(地球)处于静止或作匀速直线运动的状态。
它是机械运动的特殊情况。
4.静力学公理静力学公理概括了力的基本性质,是静力学的理论基础。
公理一(二力平衡原理):作用在刚体上的两个力,使刚体处于平衡的必要和充分条件是:这两个力的大小相等。
方向相反,作用在同一直线上。
公理二(加减平衡力系原理):可以在作用于刚体的任何一个力系上加上或去掉几个互成平衡的力,而不改变原力系对刚体的作用效果。
推论(力在刚体广的可传性):作用在刚体上的力可沿其作用线在刚体内移动,而不改变它对该刚体的作用效果。
公理三(力的平行四边形法则):作用于物体上任一点的两个力可合成为作用于同一点的一个力,即合力。
合力的矢由原两力的矢为邻边而作出的力平行四边形的对角矢来表示。
即合力为原两力的矢量和。
推论(三力平衡汇交定理):作用于刚体上3个相互平衡的力,若其中两个力的作用线汇交于—点,则此3个力必在同一平面内,且第3个力的作用线通过汇交点。
公理四(作用和反作用定律)任何两个物体相互作用的力,总是大小相等,方向相反,沿同一直线,并分别作用在这两个物体上。
公理五(刚化原理):变形体在某一力系作用下处于平衡时,如将此变形体刚化为刚体,则平衡状态保持不变。
应当注意这些公理中有些是对刚体,而有些是对物体而言。
5.约束与约束反力限制物体运动的条件称为约束。
构成约束的物体称为约束体,也称为约束。
哈工大理论力学期末复习题

平面一般力系
一、平衡条件:LRO' 00 二、平衡方程:力系中各力在两个任选的坐标轴中每一轴上的投影的代数和分
别等于0,以及各力对于平面内任意一点之矩的代数和也等于0; 三、基本方程的形式:三种
Fx
0
Fy mO
0
(F)
0
mA mB
( (
F F
) )
0 0
Fx 0(或 Fy 0)
条件:A.B两点连线不能 垂直于x轴(y 轴);
2)再分析整体,画受力图,列方程
q0 , a和M q0
q0 a2 2
C
M B
2a
FAy
a FB
M FCx
Fx 0, FAx 0
Fy
0,
FAy
FB
q0 2
2a
0
M
A
0,
M
A
q0 2
2a
2a 3
M
FB 3a
0
FCy
FB
FAy
q0 a 2
MA
q0a 2 3
[练3]图示结构在D处受水平P力作用,求结构如图示平衡时,
根据速度合成定理 va ve vr 做出速度平行四边形,如图示。
ve va cos v cos ,vr va sin vsin
ve
/ODvcos
/(cohs
)v
cos2
h
(
)
根据牵连转动的加速度合成定理
aa ae aen ar ac
aen
h
cos
( v cos2
h
)2
v2
解:动点:销子D (BC上); 动系: 固结于OA; 静系: 固结于机架。
哈工大版理论力学复习题
理论力学复习题一、是非题1. 若一平面力系向A,B两点简化的结果相同,则其主矢为零主矩必定不为零。
2. 首尾相接构成一封闭力多边形的平面力系是平衡力系。
3. 力系的主矢和主矩都与简化中心的位置有关。
4. 当力系简化为合力偶时,主矩与简化中心的位置无关5.平面一般力系平衡的充要条件是力系的合力为零。
二、选择题1.将平面力系向平面内任意两点简化,所得的主矢相等,主矩也相等,且主矩不为零,则该力系简化的最后结果为------。
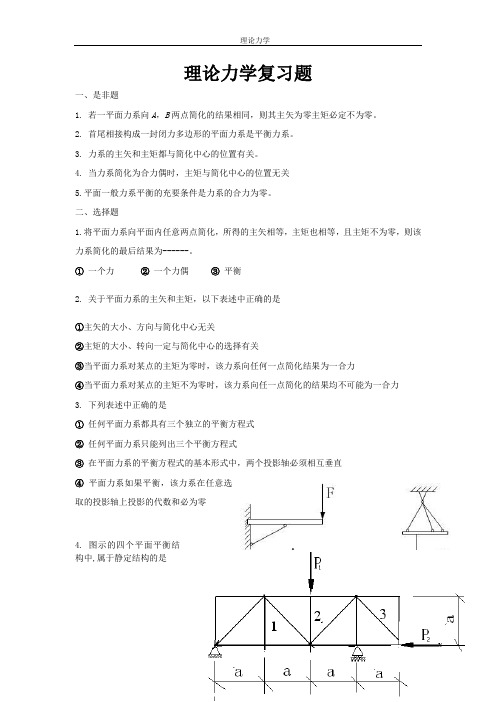
①一个力②一个力偶③平衡2.关于平面力系的主矢和主矩,以下表述中正确的是①主矢的大小、方向与简化中心无关②主矩的大小、转向一定与简化中心的选择有关③当平面力系对某点的主矩为零时,该力系向任何一点简化结果为一合力④当平面力系对某点的主矩不为零时,该力系向任一点简化的结果均不可能为一合力3.下列表述中正确的是①任何平面力系都具有三个独立的平衡方程式②任何平面力系只能列出三个平衡方程式③在平面力系的平衡方程式的基本形式中,两个投影轴必须相互垂直④平面力系如果平衡,该力系在任意选取的投影轴上投影的代数和必为零4. 图示的四个平面平衡结构中,属于静定结构的是三、填空1. 图示桁架。
已知力1p 、 和长度a 。
则杆1内力=_________; 杆2内力=_________; 杆3内力=_________。
2. 矩为M =10k N .m 的力偶作用在图示结构上。
若 a =1m ,不计各杆自重,则支座D 的约束力=_________,图示方向。
3. 一平面汇交力系的汇交点为A ,B为力系平面内的另一点,且满足方程。
若此力系不平衡,则力系简化为_________。
4.若一平面平行力系中的力与Y 轴不垂直,且满足方程0y F =∑。
若此力系不平衡,则力系简化为_________。
答案:一、1、×2、×3、×4、√5、×二、1、② 2、① 3、④ 4、③三、1、0、P 1、0 2、=10KN(--)(提示:先从CB 及绳处断开,以右部分为研究对象,以B 为矩心,列力矩方程,则D 处竖直方向力为零,再以整体为研究对象以A 为矩心,列力矩方程可求出D 处)3.过A 、B 两点的一个力4、一个力偶第三章 练习题一、是非题1.力对点之矩是定位矢量,力对轴之矩是代数量。
哈工大理论力学知识点总复习
科氏加速度
ve va vr
aan
ac aen
ar aet
ac 2v r
作业
7-6,7-7 7-19,7-21 7-10(变接触),7-20(变接触) 7-26(牵连速度、科氏加速度) 7-23(未知轨迹问题)7-17(难题)
综合问题应首先注意观察
1、各刚体运动情况,如有平面运动的杆或轮必然要用平面运动 知识
2、连接形式,注意连接点是否运动相同的点还是存在相对运动, 如果存在相对运动必然要用到合成运动的知识。一般铰链连接不 存在相对运动。
注意两章知识不要搞混
动力学
动力学三定律 动静法
动力学三定律
基础计算:转动惯量、动量、动量矩、动能 基本方法:动量法、动能法
3m M O B
Aθ
FR' y Fy P1 P2 F2
主矢FR/的大小: FR'
sin 670 .1kN
Fx 2 Fy 2
O F5R.7m
709 .4kN
x
主矢FR/的方向余弦:cos FR' ,i
Fx FR'
0.3283
关键知识点:瞬时平动
vA
//
vB
,
且
不
垂
直
于
A
B
平行或有一个夹角
v B vA vBA 沿竖直方向投影
vBA
0
AB
0
vBA
0vvBB0vvvvvBBBBBvvAAAAvBvvvA0A0AvAvcAAoBBsvvvMMMAABB
哈工大理论力学教研室《理论力学》复习大全(机械振动基础)

d 为有阷尼自由振动的圆频率,表达式为d n2 n2 。
Td 为有阷尼振动的周期,其表达式为Td
2 d
2 2 。 n2 n2 2 1 2
3 / 54
圣才电子书 十万种考研考证电子书、题库视频学习平台
4.计算固有频率的能量法 无阷尼振动系统是保守系统,机械能守恒,即
T V E 常数
式中,T 是动能;V 是势能;E 是总能量。 取系统的静平衡位置为零势能位置。振体运动到距平衡位置最远处时,速度为零,系统 动能为零,势能达到最大值;振体运动到静平衡位置时,系统势能为零,动能达到最大值。
2 / 54
0t 称为相位(或相位角),相位决定了质点在某瞬时 t 的位置,而θ称为初相角,它
决定了质点运动的初始位置。其表达式为
3.弹簧的并联不串联 (1)弹簧并联:当两个弹簧井联时,其等效弹簧刚度系数等于两个弹簧刚度系数的和。 即
(2)弹簧串联:当两个弹簧串联时,其等效弹簧刚度系数的倒数等于两个弹簧刚度系 数倒数的和。即
F kx
(2)只在恢复力作用下维持的振动称为无阷尼自由振动。
(3)无阷尼自由振动微分方程的标准形式为
d2x dt 2
02
x
0
,
此方程的解为: x Asin(0t ) ,表示无阷尼自由振动是简谐振动。
2.无阷尼自由振动的特点
(1)固有频率
①周期:无阷尼自由振动是简谐振动,是一种周期振动,周期T 2 。 0
c ,称为阷尼比。 0 2 mk
为相邻两次振幅之比,称为减缩因数,表达式为
Ai Ai1
Aenti Aen(ti Td )
enTd
哈工大理论力学笔记

第一章静力学公理和物体的受力分析§1—1静力学公理一.公理1:力的平行四边形法则①作用在物体上同一点的两个力,可以合成一个合力②合力的作用点在该点,合力的大小和方向,由这两个力为边构成的平行四边形的对角线确定或:合力矢等于这两个边矢的几何和,即21R F F F +=※:也可另作一三角形,求两汇交力合力的大小和方向二.公理2:二力平衡条件作用在刚体上的两个力(如1F 与2F ),使刚体保持平衡的必要和充分条件是:这两个力的大小相等,方向相反,且作用在同一直线上三.公理3:加减平衡力系原理在已知力上加上或减去任意的平衡力系,并不改变原力系对刚体的作用四.两个推理:1.推理1:力的可传性(1)内容:作用于刚体上的某点的力,可以沿着它的作用线移到刚体内任意一点,并不改变该力对刚体的作用(2)证明:用加减平衡力系原理先加一平衡力系,再减一平衡力系(3)说明的问题:①作用于刚体上的力的三要素:力的大小、方向、作用线②作用于刚体上的力可以沿着作用线移动→滑动矢量2.推理2:三力平衡汇交定理(1)内容:作用于刚体上三个力相互平衡的力,若其中两个力的作用线汇交于一点,则此三力必在同一平面内,且第三个力的作用线通过汇交点(2)证明:用力的可传性、平行四边形法则、二力平衡的条件证明五.公理4:作用和反作用定律作用力和反作用力总是同时存在,两力的大小相等、方向相反,沿着同一直线,分别作用在两个相互作用的物体上F F '-=※:作用力与反作用力不能看成平衡力系六.公理5:刚化原理(1)内容:变形体在某一力系作用下处于平衡,如将此变形体刚化为刚体,其平衡状态保持不变(2)说明的问题:①变形体看作刚体模型的条件:在某一力系作用下处于平衡②刚体平衡条件与变形体平衡条件的关系:刚体平衡是变形体平衡的必要条件,而不是充分条件§1—2约束和约束力一.约束1.自由体和非自由体:(1)自由体:位移不受限制的物体(2)非自由体:位移受到限制的物体2.约束:对非自由体的某些位移起限制作用的周围物体二.约束力1.约束力的含义:约束对物体所施加的,阻碍物体位移的力2.约束力的方向:与该约束所能阻碍的位移方向相反※:利用这个准则可以确定约束力的方向或作用线的位置3.约束力的大小:(1)特点:约束力的大小是未知的(2)静力学中的求法:约束力与主动力组成平衡力系→用平衡条件求约束力三.几种常见的约束及相应约束力的方向1.具有光滑接触面的约束(1)约束的特点:不能限制物体沿约束表面切线的位移,只能阻碍物体沿接触表面法线并向约束内部的位移(2)约束力:作用在接触点处,方向沿接触表面的公法线,并指向被约束的物体→法向约束力F表示※:用N2.由柔软的绳索、链条或胶带等构成的约束F表示(1)绳索对物体的约束力,作用在接触点,方向沿着绳索背离物体,用F或T(2)绕在轮子上的链条或胶带对轮子的约束力沿轮缘的切线方向3.光滑铰链约束1)向心轴承(径向轴承)(1)结构与简图(2)约束的特点:①轴可在孔内任意转动,也可沿孔的中心线移动②轴承阻碍着轴沿径向向外的位移(3)约束力:①作用位置与方向:作用在接触点,且沿公法线指向轴心,并且与轴线垂直②特点:主动力不同,轴和孔的接触点的位置不同→主动力不确定时,约束力的方向预先不能确定③通常的处理:用通过轴收的两个大小未知的正交分力Ax F ,Ay F 表示,且Ax F ,Ay F 的方向暂可任意假定2)圆柱铰链和固定铰链支座(1)一个示例:(2)圆柱铰链(铰链):①结构:由销钉将两个钻有同样大小孔的构件连接在一起而成②简图:(3)固定铰链支座(固定铰支):①结构:铰链连接中有一个固定在地面或机架上作为支座②简图:(3)分析约束力时销钉的处理:①铰链处约束力的分析:常将销钉固连在其中一个构件上→相互连接的两构件互为约束②固定铰链支座处的销钉:将销钉固连在支座上③说明:当需要分析销钉受力时,才将销钉分离出来单独研究(4)约束力的实质:①约束的实质:轴与光滑孔的配合②约束力情况:与轴承具有同样的约束,即约束力的作用线不能预先定出,但约束力垂直并通过铰链中心(5)约束力分析图3)光滑铰链约束的特点:只限制两物体径向的相对移动,而不限制两物体绕铰链中心的相对转动及沿轴向的位移4.其他约束:1)滚动支座:(1)结构:在固定铰链支座与光滑支承面之间装有几个辊轴而构成(辊轴支座)(2)约束特点:可以沿支承面移动※:约束性质与光滑面约束相同(3)约束力:垂直支承面,且通过铰链中心2)球铰链(1)结构:通过圆球和球壳将两个构件连接在一起的约束(2)约束的特点:使构件的球心不能有任何位移,但构件可绕球心任意转动(3)约束力:①通过接触点与球心,但方向不能预先确定的一个空间约束力②处理方法:用三个正交分力表示3)止推轴承(1)约束特点:除了能限制轴的径向位移外,还能限制轴沿轴向的位移(2)约束力特点:有三个正交分量(3)简图与约束力:§1—3物体的受力分析和受力图一.物体受力的类型:(1)主动力(一般是已知的)(2)被动力:约束对于物体的约束力二.受力分析的要求:(1)要将受力物分离出来,画出它的简图→取研究对象或分离体(2)画出物体所受的所有力,注意每个力的作用位置与作用方向三.有用模型→二力构件(二力杆):只在两个力作用平衡的构件,两个力必沿两作用点的连线,且等值反向第二章平面汇交力系与平面力偶系§2—1平面汇交力系合成与平衡的几何法一.平面汇交力系合成的几何法、多边形法则1.平面汇交力系的含义:各力的作用线都在同一平面内且汇交于一点的力系2.平面汇交力系可合成:①力的可传性→将各力沿作用线移至汇交点②平行四边形法则→所有的力可合成一个合力3.平面汇交力系合成的几何法:①平行四边形法则;②多边形法则4.结论:平面汇交力系可简化为一合力,其合力的大小与方向等于各分力的矢量和(几何和),合力的作用线通过汇交点∑==+++=n1i in 21R F F F F F 二.平面汇交力系平衡的几何条件:1.平面汇交力系平衡的充要条件:该力系的合力等于零F =∑=n1i i 2.平面汇交力系平衡的几何条件:该力系的力多边形自行封闭3.求解平面汇交力系平衡问题的几何法:①按比例先画出封闭的力多边形,量得所要求的未知量②根据图形的几何关系,用三角公式计算出所要求的未知量§2—2平面汇交力系合成与平衡的解析法一.平面汇交力系合成的解析法ji F F F y x Ry Rx R F F +=+=⎪⎪⎩⎪⎪⎨⎧=+++==+++=∑∑==n 1i yi yn y2y1y n 1i xi xn x2x1x F F F F F F F F F F ,()()()()⎪⎪⎩⎪⎪⎨⎧====+=+=∑∑∑∑R yi R y R R xi R x R 2yi 2xi 2y 2x R F F F F ,cos ,F F F F ,cos F F F F F j F i F 二.平面汇交力系的平衡方程:1.平面汇交力系的平衡条件:各力在两个坐标轴上的投影的代数和分别等于02.平面汇交力系的平衡方程:0F xi =∑,0F yi =∑§2—3平面力对点之矩的概念及计算一.力对点之矩(力矩)1.问题的提出:(1)力对刚体的作用效果:使刚体的运动状态发生改变(2)刚体的运动状态:移动与转动(3)力对刚体的移动效应由力矢量度2.力臂:某点O 到力的作用线的垂直距离h 称为力对O 点的力臂※:点O 称为矩心3.力对点之矩(力矩):(1)含义:①是一个代数量②力对点之矩的绝对值等于力的大小与力臂的乘积③力对点之矩的正负为:力使物体绕矩心逆时针转向时为正,反之为负(2)力矩的表达式:Fh)(M O ±=F (3)力矩的单位:m N ⋅,m kN ⋅,mm N ⋅,mmkN ⋅(4)力矩的物理意义:力矩表示力对刚体的转动效应二.合力矩定理与力矩的解析表达式1.合力矩定理:平面汇交力系的合力对于平面内任一点之矩等于所有各分力对于该点之矩的代数和∑==n1i i O R O )(M )(M F F 2.力矩的解析表达式:x y O yF xF )(M -=F ,()∑=-=n 1i xii yi i R O F y F x )(M F §2—4平面力偶一.力偶与力偶矩1.力偶的定义:①力偶:由两个大小相等,方向相反且不共线的平行力组成的力系※:两力分别记作F ,F '②力偶臂:力偶的两力之间的垂直距离d③力偶的作用面:力偶所在的平面2.力偶的作用效果:①力偶的矢量和为零→力偶对刚体没有移动效应②力偶对各点的力矩不等于零→力偶改变刚体的转动状态※:力与力偶是静力学中的两个基本要素3.力偶矩:(1)力偶对作用面内任意点的力矩的代数和:①大小等于力与力偶臂的乘积,正负一定②大小、正负都与矩心位置无关(2)力偶矩的定义:力偶矩是一个代数量,其绝对值等于力的大小与力偶臂的乘积,正负号表示力偶的转向:以逆时针转向为正,反之为负FdM ±=※:力偶矩等于力偶中两个力对任意点的力矩的代数和二.同平面内力偶的等效定理1.定理:在同平面内的两个力偶,如果力偶矩相等,则两力偶彼此等效※:理由:①力偶只改变物体的转动状态②力偶对物体的转动效应由力偶矩度量2.推论:①任一力偶可以在它的作用面内任意移转,而不改变它对刚体的作用→力偶对刚体的作用与力偶在其作用面内的位置无关②只要保持力偶矩的大小和力偶的转向不变,可以同时改变力偶中力的大小和力偶臂的长短,而不改变力偶对刚体的作用3.结论:力偶矩是平面力偶作用的唯一量度,而力偶的臂和力的大小都不是力偶的特征量三.平面力偶系的合成和平衡条件:1.平面力偶系的合成:在同一平面内的任意个力偶可合成一个合力偶,合力偶矩等于各个力偶矩的代数和∑==n1i iM M ※:推导过程:①将各力偶在保持力偶矩不变的前提下同时改变力偶臂与力的大小,使各力偶的力偶臂大小相等②在平面内将各偶移转,使它们的作用线重合③分别求两作用线上的合力2.平面力偶系的平衡条件:平面力偶系平衡的必要和充分条件是:所有各力偶矩的代数和等于零M n1i i =∑=第三章平面任意力系§3—1平面任意力系向作用面内一点简化一.力的平移定理:可以把作用在刚体上点A 的力F 平行移到任一点B ,但必须同时附加一个力偶,这个力偶的矩等于原来的力对新作用点B 的矩※:证明过程:在B 点加一对大小与F 相等,方向与F 平行的平衡力,其中与F相反的力与F 组成一个力偶二.平面任意力系向作用面内一点简化·主矢和主矩1.平面任意力系向作用面内一点简化1)平移:力的平移定理→将作用在刚体上的平面任意力系1F ,2F ,…,n F 中的各力向简化中心O 平移,同时附加一个相应的力偶→平面任意力系等效为两个简单力系:平面汇交力系1F ',2F ',…,n F '和平面力偶系1M ,2M ,…,n M※:i i F F =',)(M M i O i F =2)合成:(1)主矢:将平面汇交力系1F ',2F ',…,n F '合成为一个通过简化中心的合力R F '→主矢∑∑==='='n1i i n 1i i RF F F (2)主矩:将平面力偶系1M ,2M ,…,n M 可合成为一个力偶O M →主矩∑∑====n1i i O n 1i i i )(M M M F (3)说明:主矢与简化中心无关,主矩与简化中心有关3)结论:平面任意力系向作用面内任选一点简化,可得一个力和一个力偶。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章静力学的基本概念与公理一、重点及难点1.力的概念力是物体间的相互机械作用,其作用效果可使物体的运动状态发生改变和使物体产生变形。
前者称为力的运动效应或外效应,后者称为力的变形效应或内效应。
力对物体的作用效果,取决于三个要素:①力的大小:②力的方向;⑧力的作用点。
力是定位矢量。
2.刚体的概念所谓刚体,是指在力的作用下形状和大小都始终保持不变的物体;或者说,刚体内任意两点间的距离保持不变。
刚体是实际物体抽象化的一种力学模型。
3.平衡的概念在静力学中,平衡是指物体相对惯性坐标系(地球)处于静止或作匀速直线运动的状态。
它是机械运动的特殊情况。
4.静力学公理静力学公理概括了力的基本性质,是静力学的理论基础。
公理一(二力平衡原理):作用在刚体上的两个力,使刚体处于平衡的必要和充分条件是:这两个力的大小相等。
方向相反,作用在同一直线上。
公理二(加减平衡力系原理):可以在作用于刚体的任何一个力系上加上或去掉几个互成平衡的力,而不改变原力系对刚体的作用效果。
推论(力在刚体广的可传性):作用在刚体上的力可沿其作用线在刚体内移动,而不改变它对该刚体的作用效果。
公理三(力的平行四边形法则):作用于物体上任一点的两个力可合成为作用于同一点的一个力,即合力。
合力的矢由原两力的矢为邻边而作出的力平行四边形的对角矢来表示。
即合力为原两力的矢量和。
推论(三力平衡汇交定理):作用于刚体上3个相互平衡的力,若其中两个力的作用线汇交于—点,则此3个力必在同一平面内,且第3个力的作用线通过汇交点。
公理四(作用和反作用定律)任何两个物体相互作用的力,总是大小相等,方向相反,沿同一直线,并分别作用在这两个物体上。
公理五(刚化原理):变形体在某一力系作用下处于平衡时,如将此变形体刚化为刚体,则平衡状态保持不变。
应当注意这些公理中有些是对刚体,而有些是对物体而言。
5.约束与约束反力限制物体运动的条件称为约束。
构成约束的物体称为约束体,也称为约束。
约束反力是约束作用在被约束物体上的力,其方向与约束类型有关。
约束反力的方向总是与约束所能阻止物体的运动或其运动趋势的方向相反。
工程上几种常见的约束类型及其约束反力酌表示法:(1)柔性体约束(绳索、链条、胶带等):约束反力沿柔性体中心线而背离被约束体,如图11所示。
图 1.1(2)光滑面约束:约束反力沿接触面的公法线方向,接触点为力酌作用点并指向物体,如图1.2所示。
图 1.2(3)光得圆柱固定唆使支座:光滑圆柱固定铰链文座的约束反力作用线必通过因拄销中心面与其轴线垂直,但方向待定,可用作用于铰心的任意两个相互垂直的分力表示。
图 1.3(a)为光滑圆柱固定铰链支座、图1.3(b)为光滑圆拄形铰链。
图 1.3(4)光滑圆柱活动铰链支座:这种约束只能限制物体与支承平面垂直方向的运动、故其约束反力必垂直于支承而且过铰链的中心,如图1.4所小。
图 1.4(5)轴承类约束:在工程上,把连接轴并限制其某种运动的构件称为轴承。
只限制垂直轴线方向移动的称为向心轴承(或径向轴承);既限制垂直轴线的方向移动又限制沿轴线方向移动的称为向心止推轴承(或径向止推轴承)。
它们的简图及约束反力分别如图1.5(a),(b)所示。
图 1.5(6)固定端约束:这种约束既能限制物体移动、又能限制物体转动,其约束反力用两个相互垂直的分力和一个反力偶表示,固定端约束的简图可表示为图 1.6(a),约束反力可表示为图1.6(b)。
图 1.6(7)球铰链约束反力可分解为通过球心的3个正交分量,如图1.7所示。
图 1.7(8)二力构件:只在两个力作用下平衡的构件,称为二力构件。
它所受的两个力必定沿两力作用点连线,且等值、反向。
6.受力分析和受力图分析物体或物体系统受有哪些力作用,称为受力分析。
将所要研究的物体或物体系从周围物体中隔离出来,称为分离体或研究对象。
在研究对象上画出它所受到的所有作用力(主动力、约束反力)。
这样的图形称为分离体的受力图。
二、解题步骤及要点正确地画出物体的受力图,是分析、解决力学问题的基础。
画受力图的步骤和应注意之处如下:(1)明确研究对象:根据求解需要。
可以取单个物体为研究对象,也可取由几个物体组成的系统为研究对象。
(2)在分离体上先画出全部己知的主动力。
(3)正确画出约束反力:一个物体往往同时受到几个约束的作用,这时应分别根据每个约束本身的特性来确定其约束反力的方向,不能凭主观臆造。
(4)当分析两物体间相互的作用力时,应遵循作用、反作用定律。
当研究系统的平衡时,在受力图上只画外约束体对研究对象的作用力(外力),不画成对出现的内力。
第二章平面力系一、重点及难点1.力对点的矩(2.1)式中点O为矩心,h为力臂。
力对点的矩为代数量。
式(2.1)中正负号规定为:力F使物体绕矩心逆时针方向转动为正;反之为负。
合力矩定理:合力(F R’=ΣF i)对某点O之矩等于所有分力F i对该点之矩的代数和。
即m O(F R’)=Σm O(F i) (2.2)2.平面共点力系(汇交力系)平面共点力系(汇交力系)可以合成为一个合力。
合力的大小和方向用几何法或解析法求得,合力的作用线通过共点力系的中心(力系的汇交点)。
(1)几何法由力多边形法则,合力矢由力多边形的封闭边决定,其指向从力多边形的始点到终点。
(2)解析法将式(2.3)投影到正交坐标轴x 、y 上,得:F Rx =F 1x +F 2x + ⋯ +F nx =ΣF i xF Ry =F 1y +F 2y + ⋯ +F ny =ΣF i y合力大小为:合力的方向由两个方向余弦确定,即3.平面力偶系(1)力偶(F ,F ')和力偶矩:由两个大小相等、方向相反且不共线的平行力组成的力系,称为力偶。
力偶对刚体仅产生转动效应,并用力偶矩来度量。
力偶矩M O 为:M O (F ,F ')=±Fd式中F 为组成力偶的力的大小,d 为力偶臂。
其正负号表示转向,习惯上常按右手法则将逆时针转向取正,反之取负。
力偶中二力对其作用平面上任一点之矩的代数和与矩心无关。
(2)平面力偶系的合成:平面力偶系可合成为一个合力偶,合力偶矩等于各个分力偶矩的代数和,即M =∑M i 。
4.平面任意力系向平面内一点的简化平面任意力系向作用面内任一点O (简化中心)简化,可得一个力和一个力偶:该力作用于简化中心,其力矢等于原力系中各力的矢量和,并称为原力系的主矢;该力偶的矩等于原力系各力对简化中心之矩的代数和,并称为原力系的主矩。
5.平面任意力系的平衡平面任意力系平衡的充分和必要条件是:力系向任一点简化的主矢和主矩都等于零。
即 000x y O F F M ===∑∑∑, , ——平面任意力系平衡方程的基本形式。
平衡方程的其它两种形式是: 两矩式:000A B x M M F ⎧=⎪⎪=⎨⎪=⎪⎩∑∑∑ x 轴不得垂直于 A ,B 两点的连线。
三矩式:000A B C M M M ⎧=⎪⎪=⎨⎪=⎪⎩∑∑∑ A 、B 、C 三点不在同一直线上。
平面任意力系有3个独立的平衡方程,可求解3个未知量。
二、解题步骤及要点(1)根据题意,选取研究对象。
在研究对象中一般要反映出待求量、已知条件,尽量使不需求的未知力少反映在分离体中。
(2)画受力图。
经过受力分析,在研究对象上画出所受的全部主动力和约束力。
受力图上只画外力,不画分离体内各部分之间相互作用的内力。
(3)列平衡方程。
根据力系的类型和需要求解的未知量的数目。
列出相应的独立平衡方程。
为使解题简捷尽可能使每个方程中只包含一个未知量。
为此、可选未知力作用线的交点为矩心,投影轴与较多的未知力相垂直。
要熟练计算力在轴上的投影和力对点的矩。
(4)在分析物体系的静定问题时,如果未知量的数目超过已写出独立平衡方程的数目,还须继续选与前者有联系的物体为分离体,画受力图,写平衡方程等,直到写出的独立平衡方程的数目足以求出全部待求量为止。
(5)解平衡方程,求出所需答案。
有时还要讨论所得结果。
第三章空间力系一、重点及难点1.力在轴上的投影、力对点的矩和力对轴的矩(1)力在轴上的投影:如果力矢F 与坐标轴x 、y 、z 正向夹角分别是α、β、γ,则力F 在各坐标轴上的投影可表示为:y z cos cos cos x F F F F F F αβγ===,,, (2)力对点的矩和力对轴的矩:在空间情况下,力F 对点O 的矩用矢量表示为:()O M F r F =⨯x y zij k xy z F F F =()()()z y x z y x yF zF i zF xF j xF yF k=-+-+- 力对轴之矩是度量力使刚体绕该轴转动效应的物理量。
可用力在垂直轴的平面上的投影对轴与平面之交点之矩表示。
它是代数量,正负号由右手法则确定。
()()2z O xy xy OAB M F M F F d A ∆==±⋅=±力F 在三个坐标轴上的投影分别为F x 、F y 、F z ,力作用点A 的坐标为x 、y 、z ,则力对轴的矩的关系为:2.空间汇交力系的合成与平衡空间汇交力系合成一合力,合力矢为 1231n R n i i F F F F F F ==++++=∑ 或:()()()R i x i y i z F F i F j F k =∑+∑+∑合力F R 的大小为:R F = 合力F R 的方向余弦为:cos ,cos ,cos iy i x iz R R R F F F F F F αβγ∑∑∑===空间汇交力系平衡的必要和充分条件是:力系中各力的矢量和等于零,即10nR i i F F ===∑ 其平衡方程为:⎪⎭⎪⎬⎫=∑=∑=∑000z y x F F F 空间汇交力系有3个独立方程,可求解3个未知量。
3.空间力偶系的合成与平衡在空间问题中,力偶矩用矢量表示,称为力偶矩矢,记作M O 。
力偶矩矢是自由矢量。
空间力偶系合成为一合力偶,合力偶矩矢等于各分力偶矩矢的矢量和,即1231n n ii M M M M M M ==++++=∑或 111x y z n n n ix iy iz i i i M M i M j M kM i M j M k ====++⎛⎫⎛⎫⎛⎫=++ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭∑∑∑ 合力偶矩矢的大小和方向余弦:M =cos ,cos ,cos y x z M M M M M Mαβγ=== 式中111;;n n nx ix y iy z iz i i i M MM M M M ======∑∑∑表示各分力偶矩矢在x 、y 、z 轴投影的代数和。
空间力偶系平衡的必要和充分条件是;各力偶矩的矢量和等于零,即12310n n i i M M M M M M ==++++==∑ 或1110;0;0n n n x ix y iy z iz i i i M M M M M M =========∑∑∑空间力偶系有3个独立方程,可求解3个未知量。