基于梯度幅度直方图和类内方差的边缘提取方法
一种基于多尺度滑动窗口图像检测行人的新方法

一种基于多尺度滑动窗口图像检测行人的新方法作者:郑贤哲王艳东刘泽宇来源:《今日自动化》2020年第03期[摘要]针对行人检测领域的相关现实问题,传统机器学习算法通常采用对整幅图片以滑动窗口逐步检测的方法解决,这样会因检测非必要背景窗口过多而大大降低计算效率,针对上述问题提出一种基于多尺度滑动窗口图像检测行人的新方法。
首先以滑动窗口遍历图像,对整幅图片进行显著性检测,然后通过二值化处理的方式,将显著性物体分割出来,最后过滤非必要窗口,继而提高检测效率。
实验中采用HOG方法提取行人特征,运用线性SVM进行检测,最后验证新方法的有效性。
实验中,使用大小为300×451Dpi、261×400Dpi的图像,检测窗口数量分别减少了44.21%、34.96%,检测速率分别提高了9.30%、12.73%。
实验结果表明,相比于传统检测方法,新方法提高了检测效率。
[关键词]HOG特征提取;行人检测;SVM;显著性检验[中图分类号]TP391 [文献标志码]A [文章编号]2095–6487(2020)03–0–04[Abstract]In view of the related practical problems in the field of pedestrian detection,traditional machine learning algorithms usually adopt a method of gradually detecting the entire picture with a sliding window, which will greatly reduce the computational efficiency due to the detection of too many unnecessary background windows. To solve the above problems, a new method of pedestrian detection based on multi-scale sliding window images is proposed. First,traverse the image with a sliding window to detect the saliency of the entire picture, then segment the salient objects by binarization, and finally filter the unnecessary windows to improve the detection efficiency. In the experiment, the HOG method is used to extract pedestrian features,linear SVM is used for detection, and finally the effectiveness of the new method is verified. In the experiment, using images with sizes of 300×451Dpi and 261×400Dpi, the number of detection windows was reduced by 44.21% and 34.96%, respectively, and the detection rate was increased by 9.30% and 12.73%, respectively. Experimental results show that compared with traditional detection methods, the new method improves detection efficiency.[Keywords]HOG feature extraction; pedestrian detection; SVM; significance test1 國内外的研究现状近年来,随着图像识别技术的发展,基于图像识别检测行人的技术也得到广泛的关注和研究。
图像处理中的边缘检测算法分析与优化

图像处理中的边缘检测算法分析与优化随着数字图像处理技术的不断发展,边缘检测在计算机视觉、模式识别和图像分割等领域中扮演着重要的角色。
边缘是图像中灰度变化较大的区域,通过检测边缘,我们可以提取图像的形状和结构信息,从而实现图像分析和理解。
本文将对常用的图像处理边缘检测算法进行分析,并探讨优化策略。
一、边缘检测算法概述1.1 Sobel算法Sobel算法是一种基于梯度的边缘检测算法,它通过计算图像梯度的大小和方向来确定边缘位置。
Sobel算法具有计算简单、鲁棒性较高的优点,但对噪声比较敏感,在图像边缘不够明显或存在噪声时容易引入误检。
1.2 Canny算法Canny算法是一种经典的边缘检测算法,它通过多个步骤来实现高效的边缘检测。
首先,通过高斯滤波器对图像进行平滑处理,以减少噪声的影响。
然后,计算图像的梯度幅值和方向,并进行非极大值抑制,以精确地定位边缘。
最后,通过滞后阈值法来进行边缘的连接和细化。
Canny算法具有良好的边缘定位能力和抗噪能力,在实际应用中被广泛使用。
1.3 Laplacian算子Laplacian算子是一种基于二阶导数的边缘检测算子,它通过计算图像的二阶导数来检测图像中的边缘。
Laplacian算子具有对灰度变化较大的边缘敏感的优点,但对噪声比较敏感,容易产生边缘断裂和误检。
为了提高Laplacian算子的效果,常常与高斯滤波器结合使用,以减少噪声的干扰。
二、边缘检测算法优化2.1 参数选择在边缘检测算法中,参数的选择对于最终的结果具有重要的影响。
例如,对于Canny算法来说,高斯滤波器的大小和标准差的选择直接影响到边缘的平滑程度和定位精度。
因此,在优化边缘检测算法时,需要根据具体的应用场景和图像特点选择合适的参数。
2.2 非极大值抑制非极大值抑制是Canny算法中的一种重要步骤,用于精确地定位边缘位置。
然而,在进行非极大值抑制时,会产生边缘断裂和不连续的问题。
为了解决这个问题,可以考虑使用像素邻域信息进行插值,从而减少边缘的断裂,并得到更连续的边缘。
Matlab实现:图像边缘提取

Matlab实现:图像边缘提取1、边缘提取算法⽅法⼀:⼀阶微分算⼦Sobel算⼦Sobel算⼦检测⽅法对灰度渐变和噪声较多的图像处理效果较好,Sobel算⼦对边缘定位不是很准确,图像的边缘不⽌⼀个像素。
Roberts算⼦Roberts算⼦检测⽅法对具有陡峭的低噪声的图像处理效果较好,但是利⽤roberts算⼦提取边缘的结果是边缘⽐较粗,因此边缘的定位不是很准确。
Prewitt算⼦Prewitt算⼦检测⽅法对灰度渐变和噪声较多的图像处理效果较好。
但边缘较宽,⽽且间断点多。
Canny算⼦Canny算⼦是⽬前边缘检测最常⽤的算法,效果也是最理想的。
Canny⽅法不容易受噪声⼲扰,能够检测到真正的弱边缘。
优点在于,使⽤两种不同的阈值分别检测强边缘和弱边缘,并且当弱边缘和强边缘相连时,才将弱边缘包含在输出图像中。
⽅法⼆:⼆阶微分算⼦Laplacian算⼦Laplacian算⼦法对噪声⽐较敏感,所以很少⽤该算⼦检测边缘,⽽是⽤来判断边缘像素视为与图像的明区还是暗区。
2、实验结果分析⼀、边缘提取:Sobel算⼦检测⽅法对灰度渐变和噪声较多的图像处理效果较好,sobel算⼦对边缘定位不是很准确,图像的边缘不⽌⼀个像素;Roberts算⼦检测⽅法对具有陡峭的低噪声的图像处理效果较好,但是利⽤roberts算⼦提取边缘的结果是边缘⽐较粗,因此边缘的定位不是很准确;Prewitt算⼦检测⽅法对灰度渐变和噪声较多的图像处理效果较好。
但边缘较宽,⽽且间断点多;Laplacian算⼦法对噪声⽐较敏感,所以很少⽤该算⼦检测边缘,⽽是⽤来判断边缘像素视为与图像的明区还是暗区;Canny⽅法不容易受噪声⼲扰,能够检测到真正的弱边缘。
优点在于,使⽤两种不同的阈值分别检测强边缘和弱边缘,并且当弱边缘和强边缘相连时,才将弱边缘包含在输出图像中。
⼆、边缘复合增强Sobel、Robert、Prewitt算⼦的增强效果并不是很明显,尤其是Robert算⼦,因为它提取的边缘点过于稀疏和离散;Laplacian算⼦和canny算⼦的增强效果都⽐较理想,将边缘叠加上去后,整个⼿的轮廓和边缘都很清晰,直观上看,canny算⼦实现的效果⽐Laplacian算⼦好,最明显的地⽅就是⼿指尖的边缘。
图像处理中的边缘检测和特征提取方法
图像处理中的边缘检测和特征提取方法图像处理是计算机视觉领域中的关键技术之一,而边缘检测和特征提取是图像处理中重要的基础操作。
边缘检测可以帮助我们分析图像中的轮廓和结构,而特征提取则有助于识别和分类图像。
本文将介绍边缘检测和特征提取的常见方法。
1. 边缘检测方法边缘检测是指在图像中找到不同区域之间的边缘或过渡的技术。
常用的边缘检测方法包括Sobel算子、Prewitt算子和Canny算子。
Sobel算子是一种基于梯度的边缘检测算法,通过对图像进行卷积操作,可以获取图像在水平和垂直方向上的梯度值,并计算获得边缘的强度和方向。
Prewitt算子也是一种基于梯度的边缘检测算法,类似于Sobel算子,但其卷积核的权重设置略有不同。
Prewitt算子同样可以提取图像的边缘信息。
Canny算子是一种常用且经典的边缘检测算法。
它结合了梯度信息和非极大值抑制算法,可以有效地检测到图像中的边缘,并且在边缘检测的同时还能削弱图像中的噪声信号。
这些边缘检测算法在实际应用中常常结合使用,选择合适的算法取决于具体的任务需求和图像特点。
2. 特征提取方法特征提取是指从原始图像中提取出具有代表性的特征,以便进行后续的图像分析、识别或分类等任务。
常用的特征提取方法包括纹理特征、形状特征和颜色特征。
纹理特征描述了图像中的纹理信息,常用的纹理特征包括灰度共生矩阵(GLCM)、局部二值模式(LBP)和方向梯度直方图(HOG)。
GLCM通过统计图像中像素之间的灰度变化分布来描述纹理特征,LBP通过比较像素与其邻域像素的灰度值来提取纹理特征,HOG则是通过计算图像中梯度的方向和强度来提取纹理特征。
这些纹理特征可以用于图像分类、目标检测等任务。
形状特征描述了图像中物体的形状信息,常用的形状特征包括边界描述子(BDS)、尺度不变特征变换(SIFT)和速度不变特征变换(SURF)。
BDS通过提取物体边界的特征点来描述形状特征,SIFT和SURF则是通过提取图像中的关键点和描述子来描述形状特征。
matlab边缘提取及拟合

matlab边缘提取及拟合边缘提取及拟合是数字图像处理中的一个重要的步骤。
边缘可以用于图像分割、物体识别、目标跟踪等领域。
本文将介绍边缘提取的常用方法以及拟合方法,并结合MATLAB代码进行讲解。
一、边缘提取方法1. Sobel算子Sobel算子是一种基于梯度的边缘检测算法,其原理是利用像素点周围的灰度值来计算梯度,从而得到边缘。
在MATLAB中,可以使用imgradient函数实现Sobel算子。
代码示例:I = imread('lena.png');[Gx, Gy] = imgradientxy(I);[Gmag, Gdir] = imgradient(Gx, Gy);imshowpair(Gmag, Gdir, 'montage');2. Canny算子Canny算子是一种基于多级阈值的边缘检测算法,其原理是先通过高斯滤波器对图像进行平滑处理,然后计算梯度,再进行非极大值抑制和双阈值分割,最后得到边缘。
在MATLAB中,可以使用edge函数实现Canny算子。
代码示例:I = imread('lena.png');BW = edge(I, 'canny');imshow(BW);二、拟合方法1. 直线拟合直线拟合是一种常用的边缘拟合方法,其原理是通过最小二乘法对边缘点进行拟合,从而得到一条直线。
在MATLAB中,可以使用polyfit函数实现直线拟合。
代码示例:I = imread('lena.png');BW = edge(I, 'canny');[H, T, R] = hough(BW);P = houghpeaks(H, 10);lines = houghlines(BW, T, R, P);imshow(I), hold onmax_len = 0;for k = 1:length(lines)xy = [lines(k).point1; lines(k).point2];plot(xy(:,1),xy(:,2),'LineWidth',2,'Color','green');% Plot beginnings and ends of linesplot(xy(1,1),xy(1,2),'x','LineWidth',2,'Color','yellow');plot(xy(2,1),xy(2,2),'x','LineWidth',2,'Color','red');% Determine the endpoints of the longest line segmentlen = norm(lines(k).point1 - lines(k).point2);if ( len > max_len)max_len = len;xy_long = xy;endend2. 圆拟合圆拟合是一种边缘拟合方法,其原理是通过最小二乘法对边缘点进行拟合,从而得到一个圆。
医学图像处理中的边缘检测与分割算法

医学图像处理中的边缘检测与分割算法边缘检测与分割是医学图像处理中的重要部分,被广泛应用于疾病诊断、医学影像分析和手术辅助等领域。
边缘检测算法用于提取图像中的边缘信息,而分割算法则可以将图像划分为不同的区域,有助于医生对图像进行进一步分析和诊断。
一、边缘检测算法在医学图像处理中,常用的边缘检测算法包括基于梯度的方法、基于模型的方法和基于机器学习的方法。
1. 基于梯度的方法基于梯度的边缘检测算法通过计算图像中像素点的梯度值来确定边缘位置。
常用的算法包括Sobel算子、Prewitt算子和Canny算子。
Sobel算子是一种常用的离散微分算子,通过在图像中对每个像素点应用Sobel算子矩阵,可以得到图像的x方向和y方向的梯度图像。
通过计算梯度幅值和方向,可以得到边缘的位置和方向。
Prewitt算子与Sobel算子类似,也是一种基于梯度的边缘检测算子。
它通过将图像中的每个像素点与Prewitt算子矩阵进行卷积运算,得到图像的x方向和y方向的梯度图像。
进一步计算梯度幅值和方向,可以确定边缘的位置和方向。
Canny算子是一种经典的边缘检测算法,它采用多步骤的方法来检测边缘。
首先,对图像进行高斯滤波来减少噪声。
然后,计算图像的梯度幅值和方向,进一步剔除非最大值的梯度。
最后,通过设置双阈值来确定真正的边缘。
2. 基于模型的方法基于模型的边缘检测算法借助数学模型来描述边缘的形状和特征。
常用的算法包括基于边缘模型的Snake算法和基于边缘模型的Active Contour算法。
Snake算法(也称为活动轮廓模型)是一种基于曲线的边缘检测算法。
它通过将一条初始曲线沿着图像中的边缘移动,使得曲线更好地贴合真实边缘。
Snake算法考虑了边缘的连续性、平滑性和能量最小化,可以获得较为准确的边缘。
Active Contour算法是Snake算法的进一步发展,引入了图像能量函数。
通过最小化能量函数,可以得到最佳的边缘位置。
Active Contour算法可以自动调整曲线的形状和位置,适应复杂的图像边缘。
基于图像的红外镜头焦距快速检测方法研究

xtarget
精度的参数有探测器像元的水平尺寸,平行光管焦 ) (5)
2 (q p) fcol
距、矩形靶标的物理尺寸和靶标在图像中所占的水
2 实验结果及分析
平像素。其中,探测器像元的水平尺寸,平行光管 焦距、矩形靶标的物理尺寸受到机加件加工精度的
本文选用的靶标为刀口靶,半径为 16 mm,平 行光管焦距为 260 mm,探测器为非制冷探测器,分 辨率为 640×512,像元间距为 17 m,且红外镜头 理论焦距为 54 mm。图 2(a)为红外镜头处于聚焦状 态下,刀口靶经光学成像系统后的输出图像,图 2(b) 为图像经二值化后目标边缘提取结果,图 2(c)为目 标经仿射变换后的输出结果。由图 2(b)可得,本文 方法可准确提取刀口靶标的边缘轮廓。
cos( ) sin( ) 0 sin( ) cos( ) 0
1.4 焦距计算公式推导 矩形靶标经光学成像系统的示意图如图 1 所示。
其中 x_target 为矩形靶标的物理宽度,y_target 为矩形 靶标的物理高度,单位均为 mm。矩形靶标经光学系 统成像后输出的图像尺寸为 m×n,且靶标在图像中 所占像素大小为 q-p 和 s-r,单位均为像素。利用 光学成像系统的三角关系,可得如下关系式:
口靶图像的焦距快速检测方法。该方法先采集红外镜头聚焦状态下的刀口靶图像,再进行刀口靶图
像的二值化处理;通过提取目标的边缘轮廓,获得最小外接矩形的顶点坐标信息,从而估算出红外
镜头对应焦距。实验结果证实:该检测方法可快速、准确地测量出镜头的焦距,且测量的平均绝对
误差百分比小于 1.48。该方法为红外镜头重要参数的快速检测奠定基础。
0 引言
镜头焦距(focal length)是指镜头光学后主点到 焦点的距离,是镜头的重要性能指标。镜头焦距的长 短决定着拍摄的成像大小,视场角大小,景深大小和 画面的透视强弱[1],因此如何准确检测红外镜头的焦 距是红外镜头参数检测的一项重要研究内容。
图像边缘检测原理及方法
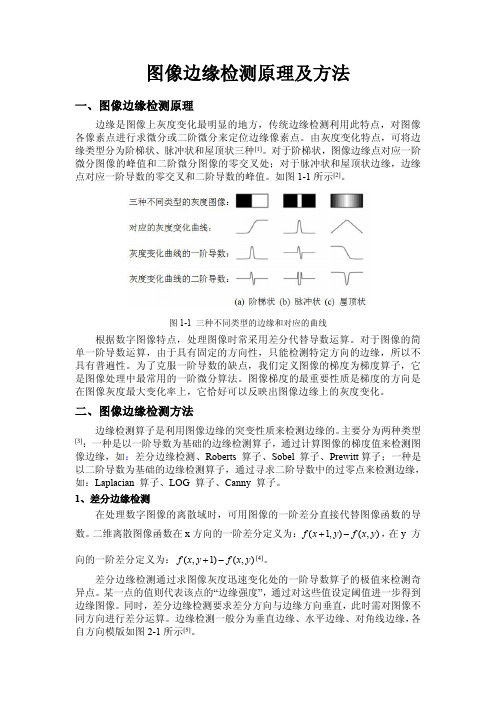
1、差分边缘检测 在处理数字图像的离散域时,可用图像的一阶差分直接代替图像函数的导 数。 二维离散图像函数在 x 方向的一阶差分定义为: f ( x 1, y ) f ( x, y ) , 在y 方 向的一阶差分定义为: f ( x, y 1) f ( x, y ) [4]。 差分边缘检测通过求图像灰度迅速变化处的一阶导数算子的极值来检测奇 异点。某一点的值则代表该点的“边缘强度”,通过对这些值设定阈值进一步得到 边缘图像。同时,差分边缘检测要求差分方向与边缘方向垂直,此时需对图像不 同方向进行差分运算。边缘检测一般分为垂直边缘、水平边缘、对角线边缘, 各 [5] 自方向模版如图 2-1 所示 。
二、图像边缘检测方法
边缘检测算子是利用图像边缘的突变性质来检测边缘的。 主要分为两种类型 :一种是以一阶导数为基础的边缘检测算子,通过计算图像的梯度值来检测图 像边缘,如:差分边缘检测、Roberts 算子、Sobel 算子、Prewitt 算子;一种是 以二阶导数为基础的边缘检测算子,通过寻求二阶导数中的过零点来检测边缘, 如:Laplacian 算子、LOG 算子、Canny 算子。
2 f ( x, y )
2 f ( x, y ) 2 f ( x, y ) x 2 y 2
(2-10)
使用差分方程对x 和y 方向上的二阶偏导数近似如下。
2 f Gx ( f (i, j 1) f (i, j )) f (i, j 1) f (i, j ) x 2 x x x x f (i, j 2) 2 f (i, j 1) f (i, j )
s x { f ( x 1, y 1) 2 f ( x 1, y ) f ( x 1, y 1)} { f ( x 1, y 1) 2 f ( x 1, y ) f ( x 1, y 1)} s y { f ( x 1, y 1) 2 f ( x, y 1) f ( x 1, y 1)} { f ( x 1, y 1) 2 f ( x, y 1) f ( x 1, y 1)}
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第30卷第12期2005年12月武汉大学学报・信息科学版G eomatics and Information Science of Wuhan University Vol.30No.12Dec.2005收稿日期:2005211220。
项目来源:国家自然科学基金资助项目(60175022)。
文章编号:167128860(2005)1221056203文献标志码:A基于梯度幅度直方图和类内方差的边缘提取方法傅仲良1 李 勇1(1 武汉大学遥感信息工程学院,武汉市珞喻路129号,430079)摘 要:针对复杂背景中目标边缘提取的问题,提出一种基于梯度幅度直方图和类内方差进行边缘提取的新方法———CA GH (cluster algorithm based on gradient histogram )算法。
该算法先分析经“非最大梯度抑制”后的梯度幅度直方图的特征,确定边缘集中区域,再通过类内方差确定梯度阈值,并利用该阈值确定边缘。
在车牌识别中运用该方法提取复杂背景中的车牌边缘,并与Sobel 、Canny 等算法进行了比较。
结果表明,CA GH 算法适应性强、提取效率高,提取的是连通性、独立性好的单像素边缘,有利于后续的特征提取和模式识别。
关键词:边缘提取;梯度;类内方差;车牌识别中图法分类号:P237.4 边缘提取是图像处理的一个重要内容,是从图像中提取感兴趣对象的边缘信息,同时尽量去除不需要的图像信息,对后续的特征提取和模式识别起着关键作用。
如在车牌识别问题中,车牌图像边缘提取的效果直接决定着车牌定位的精度和识别的准确率,然而,在实际图像处理过程中情况各异,往往存在着模糊、噪声干扰等问题,这就要求边缘提取方法有较高的提取质量和较强的适应性[1]。
边缘提取方法有很多,传统的方法有Ro 2bert s 、Prewitt 、Sobel 、Laplacian 等微分算子法,它们是用小区域模板进行卷积来近似计算梯度的并行边界提取方法。
由于只考虑了局域特征而忽视了图像的整体情况,它们对噪声比较敏感,对图像复杂情况的适应性不强[2]。
利用边缘幅值与边缘方向信息提取边缘的Canny 算法在用Guass 平滑去噪的同时也损失了有用边缘的梯度信息,致使提取的边缘产生了变形,又由于采取双阈值进行边缘跟踪以确定边缘,使得边缘独立性降低,容易产生粘连。
针对复杂背景中目标边缘提取的问题,本文提出一种基于梯度幅度直方图和类内方差进行边缘提取的新方法———CA GH (cluster algorit hm based on gradient histogram ),该算法先分析梯度幅度直方图,确定其边缘集中区域,通过类内方差确定其梯度阈值,并利用该阈值确定其边缘。
1 基于梯度幅度直方图和类内方差进行边缘提取 CA GH 算法首先把图像转化成256色灰度位图,然后进行以下步骤。
1)局部最大梯度点的确定计算图像像素的方向导数及梯度幅度,并抑制非局部最大梯度点,这一步跟Canny 算法中对应步骤相似。
但该方法直接对原图像进行处理,而没有进行平滑,因而,很好地保存了目标的边缘梯度信息。
计算g (x ,y )的梯度,首先得到对于x 和y 的偏微分值P (x ,y )和Q (x ,y ),其计算方程参见文献[3]。
通过计算2像素×2像素邻域矩阵的平均有限差分,并作为x 和y 偏微分,得到图像梯度的幅度和方向[3]:M (x ,y )=P 2(x ,y )+Q 2(x ,y )θ(x ,y )=arctan (Q (x ,y )/P (x ,y )) 由此得到的梯度图,再进行抑制非局部最大梯度点。
其基本思想是根据当前点周围8个方向上相邻像素的梯度值来判断当前点是否具有局部最大梯度值,如果是,则将其判为可能的边缘点, 第30卷第12期傅仲良等:基于梯度幅度直方图和类内方差的边缘提取方法否则为非边缘点[3]。
由可能的边缘点构成边缘图(记为p Edge )。
2)边缘集中分布区间的确定由于p Edge 中抑制了非局部的最大梯度点,所以去掉了梯度为零和邻域内梯度较小的点,剩下的是可能为目标边缘的点。
建立p Edge 的梯度幅度直方图(记为hist1)。
如图1是三幅车辆牌照图像,经过上述步骤处理后,其梯度幅度直方图如图2所示。
研究hist1发现像素的梯度分布极不均匀,大部分像素集中在狭小的梯度区间内。
根据hist1可以作出梯度幅度的累加直方图(记为hist2)。
图1 原图Fig.1 Original Images图2 梯度幅度直方图Fig.2 Analysis of Gradient Histogram由hist1得出最大梯度值maxmag 。
设span 为所求梯度区间的宽度,span 变化区间设为[maxmag/5,maxmag ],所求边缘集中分布的区间起点的梯度值设为t hdlow ,终点设为t hdhigh 。
设slope 为hist2图中span 区间内的斜率。
让span 从maxmag/5到maxmag 之间变化,t hdlow 在[1,maxmag 2span ]中变化,求出使得slope 最大的t hdlow 的值,同时也求出对应的t hdhigh ,[t hdlow ,t hdhigh ]就是所求目标边缘集中分布的梯度区间。
3)利用类内方差求出梯度阈值阈值法是图像分割的经典方法,其基本思想是确定一个阈值,然后把每个像素和阈值作比较,根据比较的结果把像素分为两类———目标或者背景。
其中确定其阈值是关键。
用类别方差确定阈值是一种常用的图像分割方法。
通常用到的类别方差有类间方差和类内方差两种。
类间方差反映的是两类之间区别的大小,而类内方差反映的是每类像素之间差别的大小。
因为边缘集中分布的梯度区间通常比较狭窄,分类后的类间方差变化不大,所以这里只用类内方差来确定最佳梯度阈值T 。
待分类的像素是p Edge 图中的梯度范围在[t hdlow ,t hdhigh ]之间的像素。
令L =t hdlow ,H =t hdhigh 。
阈值t 将像素划分为两类:C 0={L ,L +1,…,t -1},C 1={t ,t +1,t +2,…,H}。
若像素的梯度值i (x ,y )<t ,则(x ,y )∈C 0;若i(x ,y )≥t ,则(x ,y )∈C 1。
i 为梯度,则梯度为i的像素个数为p i 。
C 0和C 1每类的像素总数为:ω0=∑t-1i =Lpi,ω1=∑Hi =tp iC 0和C 1每类的梯度均值为:μ0=∑t-1i =0ip i/ω0,μ1=∑Hi =ti p i/ω1C 0和C 1每类的方差为:σ2=∑t-1i =0(i -μ0)2p i /ω0,σ21=∑Hi =t(i -μi)2p i /ω1 按照模式识别理论,这两类的类内方差为:σ2ω=(ω0σ20+ω1σ21)/(ω0+ω1)求使类内方差σ2ω最小的t ,即为最佳梯度阈值T 。
根据阈值T 对p Edge 图的像素进行分类,如果梯度i (x ,y )≥T ,则把(x ,y )灰度值变为0,否则灰度值为255。
2 实验结果为了检验该算法的有效性和可靠性,选取了100幅不同时间、不同地点、不同天气条件下、复杂背景中的不同车辆牌照图像用该算法进行了边缘提取,并与Sobel 、Canny 等算法提取的结果进行比较。
其中图1中三幅图像处理的结果如图3所示。
实验结果表明,本文所提方法对图像的适应性强,边缘定位准确,能很好地抑制噪声干扰。
CA GH 算法是取具有局部最大梯度值的点作为候选边缘点,从而避免了边缘的粘连,使得边缘的独立性好,边缘宽度是单像素。
本算法采用的是基于梯度幅度直方图的自适应阈值选取方法,提取的边缘连通性好,而且算法结构简单,运行速度快,在AMD Barton 2500+CPU ,内存256M 的计算机上处理800像素×600像素图像的平均运行时间为0.219s 。
7501武汉大学学报・信息科学版2005年12月图3 算法比较Fig.3 Comparison of Algorithms参 考 文 献1 张宏林.Visual C++数字图像模式识别技术及工程实践.北京:人民邮电出版社,2003.422~4432 林 卉,赵长胜,舒 宁.基于Canny算子的边缘检测及评价.黑龙江工程学院学报,2003,17(2):3~63 梁光明,孙即祥,马 琦,等.Otsu算法在Canny算子中的应用.国防科技大学学报,2003,25(5):36~394 杨枝灵,王 开.Visual C++数字图像获取、处理及实践应用.北京:人民邮电出版社,2003.504~5725 张 引.基于空间分布的最大类间方差牌照图像二值化算法.浙江大学学报(工学版),2001,35(3):272~2756 王 隽,吴 青.阈值分割与Snake模型相结合对医学图像进行处理.计算机与信息技术,2003(10)7 籍俊伟,林小竹.梯度幅度图像与幅角图像的比较.北京石油化工学院学报,2002,10(3):1~48 胡小锋,赵 辉.Visual C++/MA TL AB图像处理与识别实用案例精选.北京:人民邮电出版社,2004.84~1189 宋建才.汽车牌照识别技术研究.工业控制计算机, 2004,17(4):44~45第一作者简介:傅仲良,博士,教授,博士生导师。
主要研究领域包括地理信息系统、虚拟现实技术、图像处理与分析、遥感、GIS 工程设计与开发等。
E2mail:fuzhl@Edge Detection B ased on G radient Histogram and V ariance Within ClustersFU Zhongli ang1 L I Yon g1(1 School of Remote Sensing and Information Engineering,Wuhan University,129Luoyu Road,Wuhan430079,China)Abstract:In t his paper,a new met hod for edge detection from complex scenes based on gra2 dient histogram and variance wit hin clusters is propo sed(cluster algorit hm based on gradient histogram,CA GH).After analysing gradient histogramming by“Non2maximal suppres2 sion”,edges can be ext racted wit h t he gradient t hreshold based on t he variance wit hin clus2 ters.In comparision wit h ot her met hods for edge detection of vehicle license plates f rom complex scenes,t his met hod has better adaptability and more efficiency,which generates one pixel widt h edges wit h good connectivity and independence,is good to subsequent fea2 t ure extraction and pattern recognition.K ey w ords:edge detection;gradient;variance within clusters;recognition of vehicle license platesAbout the f irst author:FU Zhongliang,Ph.D,professor,Ph.D supervisor.He research orientation includes GIS,virtual reality,image pro2 cessing and analysis,remote sensing,design and development of G IS system.E2mail:fuzhl@8501。