基于ADAMS人体动力学的建模与仿真研究
基于ADAMS人体动力学的建模与仿真研究
1.3主要研究内容和方法
1.3.1研究内容
人体动力学是研究人体的运动与作用于人体的力之间关系的科学,是运动 生物力学的分支,是体育科学、仿生机械学和动力学之间的交叉学科。人体动力 学以力学定律为基础,把人体当作力学对象,研究其受力情况。人体动力学的主 要研究内容包括人体重力、支撑反作用力、摩擦力、流体阻力、人体内力等。人 体运动中的力一般用各种测力仪器和肌电仪进行测定,并从功和能等角度进行分 析研究。
第一章绪论
到目前为止,还没有任何一个人体动力学模型可以真正鲁棒地从视频序列 中得到和恢复人体的运动信息和三维结构。因此,对人体动力学模型的研究还需 要投入更多的时间和人力进行研究。
1.2研究目的和意义
以人体为对象研究其建模方法、对其进行运动学和动力学分析的人体动力 学,是仿人机构和双足机器人研究的基础理论学科之一,在研究仿人机构和仿人 机器人的研究过程中,国内外各研究机构都以人体为对象,对其进行建模,并从 各种步态入手,做了许多仿真实验,因此,对人体进行动力学分析是仿人机器人 的关键和基础,对它的研究的深入程度直接关系到仿人机器人设计的效果。并且 研究人体动力学的建模与仿真,获取有关运动、力学数据,人体动力学研究对指 导机电产品设计、运动康复器械设计等具有重要意义,而且人体动力学的建模与 仿真研究是虚拟现在发展的一个重要内容。因此在仿生学、体育、医学、工效学 等中,研究者普遍采用观察人肢体宏观运动来分析指导体育训练,进行人体康复 进程评定和消防等特殊工种的人机工效学研究。对人体运动物理现象的研究,已 从过去的直接观察,发展到运用计算机进行建模仿真和定量分析,对运动原理的 认识也发展到从人体生理学和力学的高度来理解。
adams动力学仿真原理
adams动力学仿真原理
Adams是一种基于动力学原理进行仿真的软件,它使用多体
动力学理论和计算力学算法,对系统中的物体进行建模和仿真,以模拟真实的物体运动和相互作用。
Adams的仿真原理主要基于以下几个方面:
1. 多体动力学:Adams使用多体动力学理论来描述系统中的
物体运动。
多体动力学是物体受力和受力作用导致的加速度之间的关系。
通过建立质点、刚体或弹性体等物体的动力学模型,并考虑物体之间的相互作用,可以求解物体的运动轨迹、速度和加速度等。
2. 约束条件:Adams支持对系统中物体之间的各种约束条件
进行建模和仿真。
约束条件可以是几何约束,如固定连接、旋转关节、滑动关节等,也可以是物理约束,如弹簧、阻尼器等。
Adams利用这些约束条件来限制物体的运动范围,并求解约
束条件下的系统运动。
3. 接触和碰撞:Adams还考虑了系统中物体之间的接触和碰撞。
通过建立接触模型和碰撞模型,Adams可以模拟物体之
间的接触力和碰撞力,并根据物体的质量、形状和速度等参数计算物体的反应。
4. 动力学求解:Adams使用高效的动力学求解算法,通过求
解物体运动的微分方程组,得到物体的运动轨迹、速度和加速度等。
求解过程中,Adams考虑了物体之间的相互作用和约
束条件,并根据物体的质量、惯性、摩擦力等参数计算物体的运动状态。
总的来说,Adams的仿真原理基于多体动力学理论和计算力学算法,并考虑了物体之间的约束、接触和碰撞等相互作用,以模拟系统中物体的真实运动和行为。
基于ADAMS及ANSYS的柔性机器人动力学仿真系统

基于ADAMS及ANSYS的柔性机器人动力学仿真系统一、本文概述随着科技的快速发展,机器人在工业、医疗、军事等领域的应用越来越广泛。
其中,柔性机器人以其独特的柔性和适应性,在众多应用场景中表现出显著的优势。
然而,柔性机器人的动力学特性复杂,传统的建模与仿真方法往往难以准确描述其运动行为。
因此,开发一套基于ADAMS及ANSYS的柔性机器人动力学仿真系统,对于提高柔性机器人的设计效率、优化运动性能、预测运动行为具有重要意义。
本文旨在介绍一种基于ADAMS及ANSYS的柔性机器人动力学仿真系统的设计与实现方法。
文章将对柔性机器人的动力学特性进行分析,明确仿真系统的需求和目标。
详细介绍仿真系统的总体架构和各个模块的功能,包括柔性机器人的建模、动力学方程的建立、仿真求解以及结果后处理等。
在此基础上,文章将重点探讨ADAMS和ANSYS在仿真系统中的应用,以及它们之间的数据交互和协同工作机制。
通过实际案例验证仿真系统的有效性,并对未来研究方向进行展望。
通过本文的阐述,读者可以深入了解柔性机器人动力学仿真系统的基本原理和实现方法,为相关领域的研究人员提供有益的参考和借鉴。
本文的研究成果也将为柔性机器人的设计、优化和控制提供有力的技术支持。
二、柔性机器人动力学建模柔性机器人的动力学建模是理解其运动行为并进行精确控制的关键。
建模过程中,需要同时考虑机器人的刚性部分和柔性部分的动力学特性。
在这个过程中,我们采用了ADAMS和ANSYS这两个强大的工程仿真软件。
我们利用ADAMS进行多体系统动力学建模。
ADAMS以其强大的刚体动力学仿真能力,可以精确模拟机器人的刚性部分运动。
我们根据机器人的实际结构,在ADAMS中建立了详细的多体系统模型,包括连杆、关节、驱动器等各个部分。
然后,通过定义各个部件之间的约束关系,如转动副、移动副等,以及设定驱动器的运动规律,我们能够在ADAMS中模拟出机器人的各种运动状态。
然而,对于柔性机器人来说,仅仅考虑刚性部分的动力学是不够的。
基于ADAMS的双足机器人建模与仿真
第 27卷 第 5期 文章编号: 1006 - 9348( 2010) 05 - 0162- 04
计算机仿真
2010年 5月
24
2所示的平面二连杆
逆运动学问题。
左 腿髋部的两个关节角可由约束 8 = - 0 和 6 = 4 2 来确定。
对右腿来 说, 在 O 系中髋部 ( C2 点 ) 和踝部 (A 2 点 ) 的坐 标之差为:
xC 2 - xA 2
- L1 sin( 7 - 5 ) - L2 sin 7
yC 2 - yA 2 = ( L1 cos( 7 - 5 ) + L 2 co s 7 ) s in 9 ( 8)
zC 2 - zA 2
( L1 co s( 7 - 5 ) + L2 cos 7 ) cos 9
这个表 达式的 结构和 C 1 点坐标 的结构 类似, 可 以采用
同 样的方法来求出 5、 7和 9。1 和 3 只影响右脚的姿态, 可
以根据行走时 的需要来设定。
3 虚拟样机的建立
根据双 足机器人的 七连杆结 构模型, 在 A DAM S 中建立 双足机器人虚 拟样机模型, 所需参数根 据物理样机 的数据来 进够大。 为了实现虚拟样 机的运动, 要对相 邻连杆间的 各个关节
添加运动副。根据之前 设定的 双足 机器 人的自 由度, 各 关节 处设定的运动副如表 1。
从 P1 ( - XP, - YP ) 开始, 经过 O 点最后到达 P 2 (XP, - YP )。
表 1 虚拟样机的关节约束
MSC Adams多体动力学仿真基础与实例解析
个平动自由度。 l 大地形体:没有质量和速度,自由度为零。每个模型中必须存在,且在进入 Adams/View
后系统会自动生成,定义绝对坐标系(GCS)及坐标原点,并且在仿真过程中始终静 止不动,在计算速度和加速度时起着惯性参考坐标系的作用。
名称 Chamfer Fillet Hole
表 21 模型特征命令 功能
设置参数
倒直角
倒角边长度(Width)
倒圆角 钻孔
圆角半径(Radius) 末端半径(End Radius)
孔半径(Radius) 孔深(Depth)
25
MSC Adams 多体动力学仿真基础与实例解析
图标
名称 Boss Hollow
2.创建拉伸体(Extrusion) 对于一些复杂的不规则的几何形体,可以使用此工具来创建。单击 Solids 工具栏中的 按钮,在模型树上方出现长方体属性栏,如图 29 所示。
23
MSC Adams 多体动力学仿真基础与实例解析
图 29 创建拉伸体对话框
在下拉列表框中有 New Part、Add to Part、On Ground 选项,分别表示所创建的拉伸体是 新创建、添加到已有的构件上或者属于地面。在 Profile 栏右侧可选择 Points、Curve 选项,分 别表示拉伸体截面可由点或曲线生成。
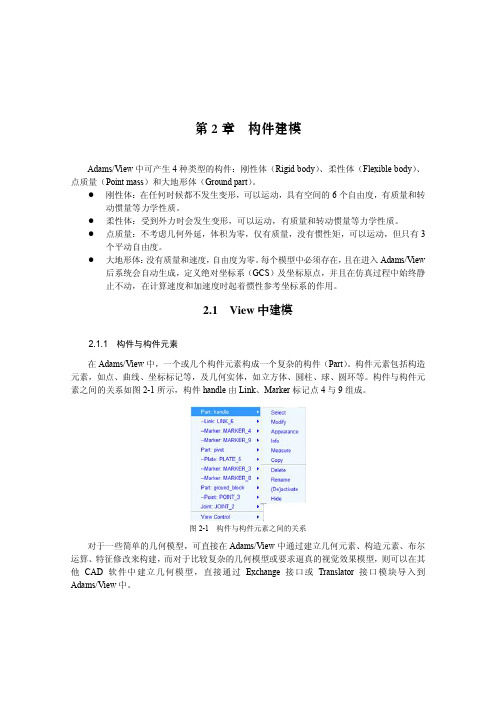
2.1 View 中建模
2.1.1 构件与构件元素 在 Adams/View 中,一个或几个构件元素构成一个复杂的构件(Part)。构件元素包括构造 元素,如点、曲线、坐标标记等,及几何实体,如立方体、圆柱、球、圆环等。构件与构件元 素之间的关系如图 21 所示,构件 handle 由 Link、Marker 标记点 4 与 9 组成。
基于ADAMS 的六轴机器人动力学仿真分析
·267·
的优化设计提供理论基础。
1 机器人本体结构设计
根据包装生产线的搬运工序的作业特点设计,文 中设计的机器人为六轴关节型机器人,其额定载荷为 20 kg,最大作业半径为 2 m。六轴关节型机器人具有 结构简单、灵活,工作效率高,应用广泛等特点,它 具有 6 个自由度,由 6 个转动关节串联构成,每个关 节由伺服电机单独驱动,在控制系统的作用下,各个 关节各自按照预定的轨迹运动,组合完成末端执行器 的功能要求,其结构简图见图 1,主要由底座,旋转 座、大臂、前臂以及手腕等部分组成[8—9]。
收稿日期:2020-11-13 作者简介:陶胤强(1974—),男,硕士,重庆化工职业学院讲师,主要研究方向为机电一体化,机械设计、制造与维修。
Copyright©博看网 . All Rights Reserved.
第 42 卷 第 17 期
陶胤强:基于 ADAMS 的六轴机器人动力学仿真分析
由于工业用六轴机器人在工作时的要求具有较 高的运动精度,所以采用伺服电机作为各关节的驱动 装置,并配有减速器实现各轴的减速。
机器人传动系统结构见图 2,J1 电机为腰部旋转 驱动,J2 电机为大臂俯仰驱动,J3 电机为前臂俯仰
第 42 卷 第 17 期 2021 年 9 月
包装工程 PACKAGING ENGINEERING
·266·Leabharlann 基于 ADAMS 的六轴机器人动力学仿真分析
陶胤强
(重庆化工职业学院,重庆 400020)
摘要:目的 为了解决六轴机器人包装行业中装箱、搬运等工序的应用问题,主要基于包装生产线的搬 运工序设计作业机器人并对其动力学进行研究。方法 根据包装生产线搬运工序的作业特点,将机器人 结构设计为六轴关节型机器人,每个关节均通过伺服电机连接减速器驱动,通过牛顿-欧拉法对机器人 进行动力学分析,建立机器人模型,并运用 ADAMS 软件对其动力学进行仿真分析。结果 所设计机器 人关节的运动轨迹曲线平稳变化,轨迹平滑连续,角速度和角加速度曲线平滑、无突变。结论 机器 人运动平稳,在运动过程中振动较小,证明了结构设计的合理性,为六轴机器人的优化设计提供了理 论基础。 关键词:包装生产线;搬运;机器人;动力学;ADAMS 中图分类号:TB486+.3; TP246 文献标识码:A 文章编号:1001-3563(2021)17-0266-04 DOI:10.19554/ki.1001-3563.2021.17.037
基于ADAMS的巡线机器人运动学、动力学仿真

基于ADAMS的巡线机器人运动学、动力学仿真一、本文概述Overview of this article随着科技的不断发展,巡线机器人在电力、通信、物流等领域的应用越来越广泛。
巡线机器人的设计和控制涉及到复杂的运动学和动力学问题,因此,对其进行精确的仿真分析具有重要的理论和实践意义。
本文旨在利用ADAMS(Automated Dynamic Analysis of Mechanical Systems)这一先进的机械系统动力学仿真软件,对巡线机器人的运动学和动力学特性进行深入的研究。
With the continuous development of technology, the application of patrol robots in fields such as power, communication, and logistics is becoming increasingly widespread. The design and control of patrol robots involve complex kinematic and dynamic problems, therefore, accurate simulation analysis of them has important theoretical and practical significance. This article aims to use ADAMS (Automated Dynamic Analysis of Mechanical Systems), an advanced mechanical system dynamics simulation software, toconduct in-depth research on the kinematic and dynamic characteristics of line patrol robots.本文首先介绍了巡线机器人的基本结构和功能,阐述了其运动学和动力学仿真的必要性。
基于ADAMS的机器人动力学仿真研究的开题报告
基于ADAMS的机器人动力学仿真研究的开题报告1.选题背景及意义随着各种工业机器人的越来越广泛使用,人们对机器人动力学仿真研究的需求也越来越高。
机器人的动力学仿真研究可以为机器人的设计、控制和运行提供参考和支持,对提高机器人的工作效率、精度和安全性有着非常重要的意义。
ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一种机械动力学仿真软件,广泛应用于产品设计、运动仿真、虚拟原型设计等领域。
通过ADAMS软件可以对机器人进行二维、三维动力学仿真,可根据不同的情况进行仿真,从而得出适用于不同机器人系统下的控制方法和运行规律。
本文旨在使用ADAMS平台,对机器人动力学进行仿真研究,从而更好地解决机器人工作中所遇到的问题,为机器人研究和应用提供技术支持和帮助。
2.研究内容和方法本研究主要内容是对机器人动力学进行仿真研究。
具体包括:1)机器人系统建模:根据机器人不同的机构和工作方式,建立机器人的三维模型,包括机器人关节、传动机构、末端执行器等。
2)动力学参数计算:基于机器人的三维模型,计算机器人的动力学参数,包括质量、重心、惯量、运动学链、级联惯量等。
3)动力学仿真:使用ADAMS软件对机器人进行动力学仿真,模拟机器人在不同工作条件下的运动状态,并对机器人的动力学性能进行分析和研究。
4)结果分析:通过分析仿真结果,评价机器人模型和控制算法的有效性,检验机器人的设计和控制方案的合理性,并对机器人的性能进行优化和提升。
3.研究计划1)文献调研和分析:通过系统地调研前人研究,分析机器人动力学仿真的发展现状和存在的问题,确定研究方向和目标。
2)机器人系统建模:根据机器人的不同应用场景,建立机器人的三维模型,包括机器人关节、传动机构等组成部分。
3)动力学参数计算:根据机器人的三维模型,计算机器人的动力学参数,建立机器人的动力学模型。
4)动力学仿真:运用ADAMS 软件对机器人进行动力学仿真,模拟机器人不同工作情况下的运动状态,包括复杂工作状态和非理想工作情况。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.3.1研究内容
人体动力学是研究人体的运动与作用于人体的力之间关系的科学,是运动 生物力学的分支,是体育科学、仿生机械学和动力学之间的交叉学科。人体动力 学以力学定律为基础,把人体当作力学对象,研究其受力情况。人体动力学的主 要研究内容包括人体重力、支撑反作用力、摩擦力、流体阻力、人体内力等。人 体运动中的力一般用各种测力仪器和肌电仪进行测定,并从功和能等角度进行分 析研究。
在论文中,作者首先从人体解剖学的基础理论出发,详细深入的分析了人 体骨骼、关节以及肌的结构、功能和运动规律。然后结合机械多体动力学原理, 对人体的各个部分进行了适当的、合理的简化,运用机械动力学仿真软件ADAMS 建立了人体动力学模型。最后,论文主要针对动力学的逆问题,在ADAMS软件 环境中,对人体行走的一个周期过程进行了仿真计算,测出了在行走中人体肩关 节、髋关节、膝关节和踝关节的扭矩,并把仿真数据与实际测量数据进行了对比 分析。
fore锄as 2.It is brought fonvard that regarding
a rigid body is reasonless.The
thinking of dividing foreann into t、Vo rigid·bodies is ammed.
3.WaIking pace aⅡd balance corI打ol are inVolVed in the walking process.Walking pace
生物力学方法是将人体看作有限刚体铰接组成的多刚体系统,可避免对人 体系统内部运动的复杂模拟,是研究人体运动系统的常用建模方法之一。通常应 用动力学普遍定理或多刚体系统动力学理论来建立运动学和动力学方程,并在各 种约束条件下求解相关参数。但是刚体数目越多,自由度越多,方程越复杂,往 往要列出数十个甚至上百个方程。因此,计算推导浩繁而复杂,手工推导几乎不 可能,大多数问题均需借助于计算机求数值解和进行仿真。此外,由于人体本身 并不是完全的刚体,还有像肌肉等大量的软组织,若完全按刚体的特性来构建模 型则存在一定的误差,而且纯刚体模型中对肌肉的力学特性和神经系统对运动的 控制考虑得较少。如果完全忽略了肌肉一神经系统的作用,人体运动系统将缺乏
body balance. 4.The dynamics simulation of walking process is compIeted successfully.The factual
data of human walking is used for verifying the simulation data.At last the modeling
thinking is proved to be accordant with anatomy atld multi-body dynamics.
Key Words:ADAMS;Human body;Modeling;Simulation
第一章绪论
第一章绪论
1.1国内外研究现状
人体运动分析是近年来计算机视觉领域中备受关注的前沿方向之一,是当 代生物力学和计算机视觉相结合的一项重要技术,具有十分广阔和重要的应用领 域,它在机器人学、仿生机械学、智能控制、人机交互、运动分析和虚拟现实等 领域都有着广泛的应用…。
广东工业大学工学硕士学位论文
灵活性和自适应性,变成了刚性的机器人。因此,纯刚体模型并不能完全真实地 模拟人体运动。
神经一肌肉一骨骼系统综合模型,从系统的角度来说,人体运动系统是一个 非线性的复杂系统,各子系统间相互影响、相互作用。例如,肌肉、骨骼、韧带 在组成运动系统前的各个部分并不具有运动的性质,只有把它们按一定方式组合 起来,在神经系统的控制和调节下才成为具有力学行为的运动系统。因此,有的 学者在研究人体运动系统时提出了系统仿真的观点,在刚体模型的基础上增加肌 肉一神经系统的作用模型。典型代表人物是南非的力学家Hat z e。20世纪70 年代,他就利用一个2段5块肌肉3自由度的腿平面模型”1解决了踢脚动作 的动力学最优化问题。1 981年他又发表了跳远研究的论文,建立了一个由1 7 段刚体46块肌肉组成的42个自由度的模型来模拟跳远动作…。Frank C. Anderson等利用1 0段、54块肌肉、23个自由度的模型”1研究人们垂直跳 到他们所能达到的最大高度时的肌肉协调模式,并在该模型基础上进一步研究了 人体的步行优化问题”。。随着神经生理学的发展,神经系统对运动系统的控制 也逐步被人们所认识,出现了一些神经控制模型。东京大学的Gentaro Taga 利用神经韵律发生器模拟神经对步行节奏的控制,把肌肉、骨骼系统和神经系统 进行集成,建立了人体步行的综合模型,其中包括8段骨骼、20块肌肉、7 对韵律发生器等””“1,并且进一步提出了跨越障碍物的步行模型““,采用步距 的事先调整及施加特定的关节力矩的方法,人体运动模型可成功地越过路面障碍 物。有些学者则利用神经网络模拟中枢神经系统建立了两自由度的上肢运动综合 模型…。。Naomi chi Ogi hara等提出了更符合人体心理学、解剖学的肌肉一骨 骼一神经系统的集成模型,考虑了中枢神经系统运动神经元的控制,并利用该模 型生成了与真实的人体步行非常吻合的人体步行模式““。因此,用这种方法研 究人体运动,更接近人体的真实运动,突出了人体内部运动规律,具有重大理论 价值。但是,人体运动系统是个非线性时变系统,对于它的控制机理一直是个富 有挑战性的问题。由于人们对人体神经系统的控制原理的认识还是有限的,真实 的神经系统结构和参数还不太清楚,肌肉力和力矩与神经刺激信号间的关系无法 直接测量,神经韵律发生器的理论模型只是从功能上对神经系统作用的理解。
dynamics is one of the foundatioⅡsubjects of the research of apery mechanism aⅡd has been widely used in the areas such as aero and automobile.The research ofhuman body dynamics is of real significance in the design of mechatronic products and exercise
关键词:ADAMs;人体;建模:仿真
』童三些奎兰三兰堡圭兰堡篁圣
Abst ract
Human body dynamics takes aim at the modeling methods of human body and the analysis of the“nematics and dynamics characteristics of the result model.Human body
a工1d support phase are analyzed and aniculation moVement parameters are designed by STEP
mathematics fImctions,a11d f№zy rule contailler is coⅡstructed to adjust articulation a119le for
第一章绪论
到目前为止,还没有任何一个人体动力学模型可以真正鲁棒地从视频序列 中得到和恢复人体的运动信息和三维结构。因此,对人体动力学模型的研究还需 要投入更多的时间和人力进行研究。
1.2研究目的和意义
以人体为对象研究其建模方法、对其进行运动学和动力学分析的人体动力 学,是仿人机构和双足机器人研究的基础理论学科之一,在研究仿人机构和仿人 机器人的研究过程中,国内外各研究机构都以人体为对象,对其进行建模,并从 各种步态入手,做了许多仿真实验,因此,对人体进行动力学分析是仿人机器人 的关键和基础,对它的研究的深入程度直接关系到仿人机器人设计的效果。并且 研究人体动力学的建模与仿真,获取有关运动、力学数据,人体动力学研究对指 导机电产品设计、运动康复器械设计等具有重要意义,而且人体动力学的建模与 仿真研究是虚拟现在发展的一个重要内容。因此在仿生学、体育、医学、工效学 等中,研究者普遍采用观察人肢体宏观运动来分析指导体育训练,进行人体康复 进程评定和消防等特殊工种的人机工效学研究。对人体运动物理现象的研究,已 从过去的直接观察,发展到运用计算机进行建模仿真和定量分析,对运动原理的 认识也发展到从人体生理学和力学的高度来理解。
尽管在过去的十多年时间内,人们对人体动力学模型的问题作了不少有益 的工作。许多学者针对不同的运动或动作建立了相应的多刚体模型,其中最简单 的可用单质点模拟人体运动。著名的Hanavan模型将人体划分成15个刚体 段,各段之间用球铰连接。还有一些复杂模型则用l 7段刚体模拟。一般说来, 多刚体模型多用于对~些规则运动的研究,如步行、跑步、垂直跳、体操等体育 动作和某些规律性动作。波兰学者woj ciech Blaj era等为了研究杂技演员在 蹦床上翻筋斗的动作过程,建立了一个9自由度的1 O刚体人体简化模型“。。 Xiaodong Zhou等用一个1 2自由度6刚体的模型来分析和模拟人步行时碰到 障碍物跌倒的过程“。,以寻找一种策略来减小跌倒时所造成的伤害。对于人机 工程中人的性能分析,美国德州科技大学工业工程系的M. ̄1.Ayoub则利用一个 抓举重物的5刚体仿真模型“1,评估和研究手工操作对人体的伤痛影响。还有 的学者将多刚体模型用于研究汽车碰撞过程中人体受到后部冲击的情况”1。
广东工业大学 硕士学位论文 基于ADAMS人体动力学的建模与仿真研究 姓名:罗小美 申请学位级别:硕士 专业:机械设计及理论 指导教师:袁清珂
20060501
摘要
摘要
以人体为对象研究其建模方法、对其进行运动学和动力学分析的人体动力 学,是仿人机构研究的基础理论学科之一,已在航空、汽车等领域得到了广泛应 用。人体动力学研究对指导机电产品设计、运动康复器械设计等具有重要意义。
atld the human dynamics model is built up in ADAMS.At 1ast the walking process is