下位机设计说明书
下位机报告
温度测量系统报告(下位机单片机阶段性报告)实习器材:硬件:PC机一台、51学习板、电源线、串口线、DS18B20温度传感器软件: KEIL C51编程软件、proteus、串口小助手、虚拟串口驱动实习目的:1、熟知51单片机的硬件结构及工作原理;2、了解DS18B20的工作特性;3、掌握KEIL C51的使用方法;4、掌握运用51单片机实际开发能力;实习地点:信息中心实习内容:用51单片机和DS18B20温度传感器以及数码管实现温度显示,再把温度发送到上位机。
一、程序设计部分主要是对ds18b20的读写操作,通过ds18b20的读数据,然后进行温度值转换,可通过数码管辅助显示当前温度值,然后吧采集到的温度值送给单片机中的SBUF进行发送数据,以此达到下位机与上位机的信息交流。
附:C51程序:#include <reg51.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned intsbit dp=P1^0;uchar flag;uint temp10;uint templ,temph;uchar ck[6];uchar code disptab[ ]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff,0xbf};uchar code dispbit[]={0xfe,0xfd,0xfb,0xf7};void udelay(uint n){while(n--);}void mdelay(uint n){uint m;for(;n>0;n--)for(m=124;m>0;m--);}void reset(){dp=1;_nop_();dp=0;udelay(80);dp=1;udelay(8);flag=dp;udelay(40);}void write_bit(bit flg) {dp=1;_nop_();_nop_();dp=0;_nop_();_nop_();if(flg==1)dp=1;udelay(10);dp=1;}void write_byte(uchar dat) {uchar i;for(i=0;i<8;i++){if((dat&0x01)==0) write_bit(0);elsewrite_bit(1);dat>>=1;}}uchar read_bit(){bit dat;dp=1;_nop_();dp=0;_nop_();dp=1;_nop_();_nop_();dat=dp;udelay(11);return dat;}uchar read_byte(){uchar i,temp;for(i=0;i<8;i++){temp>>=1;if(read_bit())temp|=0x80;}return temp;}uint read_temper(){uint temp;reset();write_byte(0xcc);write_byte(0xbe);templ=read_byte();temph=read_byte();temp=temph;temp=(temp<<8)|templ;temph=temp>>4;templ=(temp&0x0f)*6/10;reset();write_byte(0xcc);write_byte(0x44);return temp;}void disp(uint temper){uchar dispbuf[4],i;uint temp16;temp16=temper;if((temp16&0x8000)!=0){dispbuf[0]=11;temp16=(~temp16)+1;}elsedispbuf[0]=0;temp16=temp16*5/8;if(dispbuf[0]!=11)dispbuf[0]=temp16/1000;dispbuf[1]=(temp16%1000)/100;dispbuf[2]=(temp16%100)/10;dispbuf[3]=temp16%10;if(dispbuf[0]==0)dispbuf[0]=10;if((dispbuf[0]==10)&&(dispbuf[1]==0)) dispbuf[1]=10;if((dispbuf[0]==11)&&(dispbuf[1]==0)) {dispbuf[0]=10;dispbuf[1]=11;}for(i=0;i<4;i++){P2=dispbit[i];if(i==2)P0=disptab[dispbuf[i]]&0x7f;elseP0=disptab[dispbuf[i]];mdelay(1);P0=0xff;}}void sent(uchar dat){SBUF=dat;while(TI==0);TI=0;}void main(){unsigned char i;TMOD=0x20;TH1=0xfd;TL1=0xfd;TR1=1;REN=1;SM0=0;SM1=1;EA=1;ES=1;while(1){temp10=read_temper();mdelay(1);for(i=255;i>0;i--)disp(temp10);ck[0]=((temph%100)/10+0x30);ck[1]=((temph%100)%10+0x30);ck[2]=0x2e;ck[3]=(templ+0x30);}}void int_4() interrupt 4{ uint i;RI=0;ES=0;disp(temp10);for(i=0;i<6;i++){sent(ck[i]);}ES=1;}附硬件电路图:总结:通过这一个星期的下位机编程学习,是自己学到了很多知识,尤其是在学习ds18b20的时候,在根据时序图进行读写编程的时候,遇到了许多问题,但是通过和同学交流,自己反复的试验,总算解决了。
下位机使用说明

下位机控制柜使用说明本热网控制系统下位机由热网监控系统和仪表两部分组成,热网控制系统监控范围为供热热水管及换热站。
本工程采用工控组态软件,西门子可编程逻辑控制器S7-200及扩展模块等设备,现场控制器配备中文液晶文本显示器TD400c,带操作单元,安装在仪表箱面版上。
每站控制器需实时采集就地智能流量计主要参数,操作面板可显示换热站各项运行参数,便于操作员正确监视和调节所有设备。
每个热力站采用一套下位机控制柜完成热力站的监控功能,其使用说明如下:1、当操作员想要在现场知道供回水温度、压力,供水温度、压力,循环泵及补水泵的运行状态,补水水箱的液位等主要工艺参数时,只需在面板控制器上用手点击上翻键或下翻键,这时显示屏会变亮数据就会显示出来;2、现场控制:在控制柜面板下方有一旋扭开关上方有标签,在标签上显示自动标志和手动标志,其表明要是把旋扭开关拨到自动标志时二环网的电动调节阀是由上位机监控中心所控制的,这时电动调节阀只会接受由上位机所发来的控制命令而在下位机不能控。
当拨到手机标志时系统就变成就地手机状态,电动调节阀只能接受本控制柜所发来的命令。
当拨到手机标志时,在下方有个旋转按钮对其进行旋转就可对电动调节阀进行阀门开度设置,向左为收阀,向右为开阀。
该控制器能够灵活的完成温度调节、流量调节等自动控制环节。
包括所有调节回路,可修改设定值。
在控制器下方还设有巡检按钮,其功能为当热力站工作人员到此站进行工作时,按下此按钮就可在上位机主机显示来此现场的日期时间方便做好日常工作要求。
当按下巡检按钮时上方红色LED显示灯会闪烁一下,其表明功能正常,如发现显示灯不亮应及时向维护人员反映,让其检查故障原因以免耽误日常工作安排。
3、当现场出现某些紧急情况需要对仪表或者电动调节阀进行关闭避免造成损坏时,先打开下位机控制柜面板门,打开面板门后会看到左边并排有2个空气开关,在2个空气开关下方电源线上有套管标明此电源线是电动阀电源还是仪表微机电源,看清楚后对所要切断的电源进行控制。
温度采集下位机系统
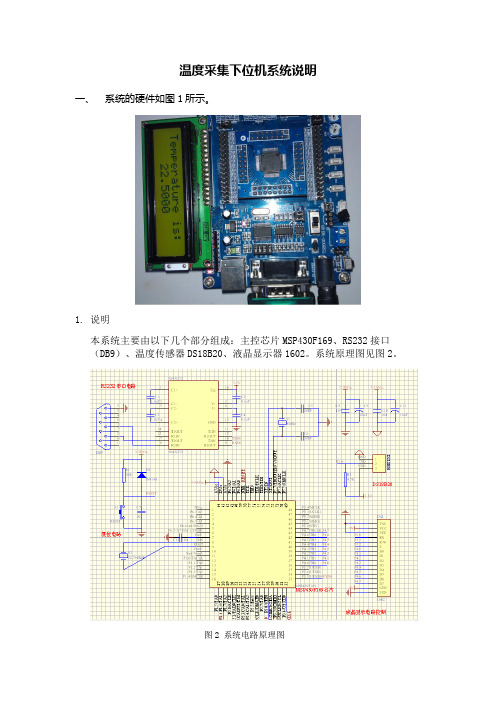
温度采集下位机系统说明一、系统的硬件如图1所示。
1.说明本系统主要由以下几个部分组成:主控芯片MSP430F169、RS232接口(DB9)、温度传感器DS18B20、液晶显示器1602。
系统原理图见图2。
图2 系统电路原理图工作原理:DS18B20是一种支持“一线总线”传输方式的数字化温度传感器,其结构如图3所示。
它的适用电压为3—5V,测温范围为-55℃——+125℃,以0.5℃递增。
温度以9位数字量读出。
本实验通过DS18B20采集环境温度,当单片机检测到DSl820的存在便可以发出ROM操作命令之一,Read ROM(读ROM)、Match ROM(匹配ROM)、Skip ROM(跳过ROM)、Search ROM(搜索ROM)、Alarm search(告警搜索) 然后对发存储器操作命令对DS18B20进行读写数据转换等操作。
单片机MSP430F169来读写DSl820的数据位和写命令字的位,然后将读到的数据转换后,在液晶显示器1602显示出来。
并将转换结果通过串口上传到上位机。
图3 DS18B20电路图2.单片机软件部分(1)主程序/*************************************************************程序功能:读取DS18B20进行温度测量以后的结果并在1602液晶上显示---------------------------------------------------------------测试说明:观察显示温度数值。
*************************************************************/#include <msp430f169.h>#include "cry1602.h"#include "DS18B20.h"typedef unsigned char uchar;typedef unsigned int uint;uchar dN[6]; //要显示的6位温度数字void Disp_Numb(uint temper);void DispStr(unsigned char x,unsigned char y,unsigned char *ptr);unsigned char zi[] = "Temperature is:";unsigned char wendu[] = " ";void PutString(uchar *ptr){while(*ptr != '\0'){while (!(IFG1 & UTXIFG0)); // TX缓存空闲?TXBUF0 = *ptr++; // 发送数据}while (!(IFG1 & UTXIFG0));TXBUF0 = '\n';}/*************************主函数*************************/void main( void ){/*下面六行程序关闭所有的IO口*/P1DIR = 0XFF;P1OUT = 0XFF;P2DIR = 0XFF;P2OUT = 0XFF;P3DIR = 0XFF;P3OUT = 0XFF;P4DIR = 0XFF;P4OUT = 0XFF;P5DIR = 0XFF;P5OUT = 0XFF;P6DIR = 0XFF;P6OUT = 0XFF;//初始化UART端口P3SEL |= 0x30; // P3.4,5 = USART0 TXD/RXD ME1 |= URXE0 + UTXE0; // Enable USART0 T/RXD UCTL0 |= CHAR; // 8-bit characterUTCTL0 |= SSEL0; // UCLK = ACLKUBR00 = 0x03; // 32k/9600 - 3.41UBR10 = 0x00; //UMCTL0 = 0x4A; // ModulationUCTL0 &= ~SWRST; // Initialize USART state machine uchar i;WDTCTL = WDTPW + WDTHOLD; //关狗P6DIR |= BIT2;P6OUT |= BIT2; //关闭电平转换,P6.2置高。
加工站毕业设计说明书

结果对比分析
将仿真结果与加工站的实际运行 数据进行对比分析,验证仿真模 型的准确性和可靠性,并找出仿 真结果与实际运行数据的差异和 原因。
瓶颈识别
通过对仿真结果的分析,识别出 加工站运行过程中的瓶颈环节和 影响因素,如设备故障、物料堆 积等。
06
总结与展望
设计成果总结
完成了加工站的整体设计和布局,实现了高效、稳定的 生产流程。
建立了完善的质量控制体系,确保了产品质量的稳定性 和可靠性。
优化了设备选型和配置,提高了生产效率和产品质量。
实现了自动化控制和信息化管理,提高了生产管理的效 率和精度。
创新点与特色
01 采用了先进的生产技术和设备,实现了高 效、节能、环保的生产模式。
控制系统实现与测试
控制系统硬件搭建
根据控制系统设计方案,搭建控制系统硬件平台,包括控制器、 传感器、执行器等。
控制软件编程
编写控制程序,实现加工站的自动化控制,包括加工流程控制、 设备状态监测、故障处理等。
控制系统测试
对编写完成的控制程序进行测试,检查程序是否能够正确运行, 实现预期的控制功能。
系统联调与验收
建立仿真模型
根据加工站的实际情况,选择合适的仿真软件,如MATLAB、Simulink等,建立加工站的仿真模型,包括设备模型 、物料模型、控制系统模型等。
数据收集和整理
收集加工站的实际运行数据,如设备故障率、物料流动速度等,对数据进行整理和分析,为仿真模型的 验证和优化提供依据。
仿真结果分析
仿真结果可视化
加工站工艺设计
工艺流程设计
原料准备
PCS7下位机程序设计

下位机程序设计向志华(实例讲解)普通电机块简单介绍下电机块常用的引脚:输入引脚:ERM接现场返回信号ESB接备妥EVO现场切换 为1时在中控位,为0时在现场位ESP现场停止ESR现场启动EEVG启动连锁(电机启动后,启动连锁会不起作用)EBVG操作连锁(一般同上下游设备做连锁)ESVG保护连锁(一般与电机自身的保护信号点做连锁)保护连锁在现场模式下也起作用 ESVA保护连锁仅中控方式(在现场模式下不起作用)ESPO一般用于单独启动某个设备就用这个引脚可以随时开停(油泵通过油压自动启动和停止,组命令要先发出)EDRW有硬低速信号时连低速信号ELOC为1时可以通过现场启动来启动启动设备(我们程序中和EVO联合起来用)EEIZ电机单机启动(连组中的打单机信号)ESTB备用模式下采用,通常模式下只有active的设备出现故障会出现报警,ESTB为1时,静态下发生掉电等情况也会出现报警EMZS为1时会锁定设备发生故障时在组中出现的错误红灯。
(斗提有辅传时可以用)EBFE组开命令EBFA组关命令QSTP急停REL_SSM 当使用software speed monitor时,REL_SSM必须连1,这时硬低速引脚就失去作用。
FEEDBTIM 返回时间STARTDEL 设备启动延时,仅在中控模式下有效。
SPEEDTIM EDRW此时必须为1,当时间超过,会产生一个速度监测故障。
HORN_TIM 用于单机模式下STOPDEL停止延时时间(通过EBFA停止时用到)GR_LINK1 连到组中输出引脚:EVS为1时意味着电机已经运行(在现场模式下不产生)EST 动态故障SST Group FaultEVSP为1意味着电机所在组已经启动,电机启动当ESPO为1时SSM 连到software speed monitor上个SSM参数上EBE 连驱动信号双向电机组(Group)块Abb变频器在周期性通讯中profibus-dp协议使用所谓的 PPO即Parameter/Process Data Objects 参数过程数据对象,我们一般选用ppo4(窑变频器我们一般选用的ppo5)注意硬件属性中operation mode的选择。
下位机软件概要设计100108

广东工业大学信息学院机电控制研究所软件开发文档文档编号:WD版本号:WD2009文档名称:下位机软件概要设计说明书项目名称:基于Windows的弯刀加工控制系统项目负责人:编写:赖南辉2009 年12 月日校对:年月日审核:年月日批准:年月日1引言1.1 编写目的本说明书提供了用C8051F单片机开发的下位机各个模块部件的说明,以供编码人员具体实现及今后的维护工作。
2总体设计2.1 设计原则在确定目标系统的过程中,主要遵循了以下几个原则:系统设计考虑程序的扩展性系统运行的稳定性和安全性(为现实对象构造合适的类,使用合适的数据和方法)有一定的意外事件自动处理能力,并有相应的意外事件提醒及记录功能系统的参数可以通过系统进行设置如果设计开发过程中扩展性、维护性与系统运行速度的开发设计有冲突,优先考虑系统扩展性、维护性。
界面设计统一,使用方便、界面友好、配置和管理简单灵活对于系统设置要求开发比较灵活的辅助工具,以配合系统开发采用可靠的加密技术防止软件发布后备盗版。
3软件结构下位机软件由如下几个模块组成:系统初始化模块(串行通信设置,中断寄存器,输入输出端口设置,定时器设置)串口通信模块(点动函数处理模块,传感器状态检测,过程参数存储模块)基本函数整理和编制脉冲产生模块编码检测模块连续弯刀控制程序编制单段弯刀控制程序编制4程序描述本软件是使用结构化C语言开发的。
程序应该注重程序的结构化,以下对各个重要的构件进行列举:4.1 系统初始化模块(输入输出端口设置,定时器设置,串行通信设置)4.2 串口通信中断模块串口发送函数:其它处理函数1.加工数据向下传输,把接收数据写进SRAM(下传)起点:上位机与下位机只要之间有数据通信,都必须进行握手,以确保其可靠性,准确性。
握手(上传):数据包接收成功信号回馈信号数据名给PC机(OK)加工过程数据(上传):下位机数据加工过程中间隔X毫米回发当前数据给PC机,加工过程的数据位(L1~L200)。
上下位机设计文档 -回复

上下位机设计文档-回复上下位机设计文档是一种在计算机领域中常见的文档形式,主要用于描述计算机系统中的上位机(或称为主机)与下位机(或称为从机)之间的通信和数据交换方式。
上位机通常是指控制和监视系统的中央处理单元,下位机则是执行具体任务的辅助处理单元。
本文将逐步回答关于上下位机设计文档的一些核心问题,以帮助读者全面了解该文档的设计和使用。
第一步:文档目的和背景上下位机设计文档的第一步是明确文档的目的和背景。
在这一步中,需要回答以下问题:- 为什么需要上下位机设计文档?- 该文档的主要受众是谁?- 该文档是为了解决什么问题或提供什么功能?第二步:系统架构和通信协议在明确文档的目的和背景后,需要着重介绍系统的整体架构和通信协议。
这一部分应回答以下问题:- 上下位机之间的通信方式是什么?例如,是通过串口、以太网还是其他的通信协议?- 上下位机之间的通信数据格式和协议规范是什么?例如,应使用什么样的数据包格式、编码规则和错误检测方法?第三步:硬件设计和接口规范接下来,需要详细描述系统中各个硬件组件的设计和接口规范。
这一步应包括以下内容:- 上下位机之间的硬件连接方式和接口类型是什么?例如,是通过逻辑门、总线接口还是其他方式?- 各个硬件组件的电气特性、引脚定义和连接方式是什么?例如,各个引脚功能的分配、数据线和电源线的连接方式等。
第四步:软件设计和数据通信随后,需要详细描述系统中涉及的软件设计和数据通信过程。
这一步应涵盖以下内容:- 上下位机之间的软件通信协议是什么?例如,是通过编写自定义的通信协议还是使用现有的通信库或协议?- 上下位机之间的数据交换方式和频率是多少?例如,是实时更新还是按需求定时更新?- 上位机与下位机之间的数据处理和控制逻辑如何设计?例如,数据采集、传输、处理和控制的流程是怎样的?第五步:系统测试和验证计划最后,需要列出系统测试和验证计划,以确保上下位机设计的正确性和稳定性。
这一步应回答以下问题:- 如何测试上下位机之间的通信和数据交换功能?例如,是否需要编写自动化测试脚本或使用特定的测试工具?- 何时测试系统的不同模块和功能?例如,是否需要在设计、开发和部署过程的不同阶段进行测试?- 如何验证系统的性能和稳定性?例如,是否需要进行压力测试、安全性测试或故障恢复测试?通过以上步骤的详细描述,上下位机设计文档将提供一个全面的视角,帮助读者了解该系统的设计和使用。
上下位机设计文档

上下位机设计文档一、引言上下位机设计文档旨在介绍和说明上下位机的设计原理、功能模块以及实现方式。
本文档将包括以下几个部分:介绍上下位机的定义和作用、上下位机设计的基本原则、上下位机的功能模块设计、通信协议设计、硬件设计以及软件设计等。
二、定义和作用上下位机是指由上位机和下位机组成的一种系统结构。
上位机一般是指PC机或其他计算机设备,而下位机则是指与上位机相连的一种控制或执行设备,例如传感器、执行器等。
上下位机通过通信协议进行数据的传输和交互,实现数据采集、控制和监控等功能。
上下位机的作用主要有以下几个方面:1. 数据采集和处理:上下位机通过下位机采集传感器等设备的数据,并进行处理和分析,从而实现对实时数据的获取和处理。
2. 控制和执行:上位机通过下位机实现对执行器的控制,例如机器人的运动控制、设备的开关控制等。
3. 监控和调试:上位机可以实时监控下位机的状态和运行情况,便于故障的诊断和调试。
4. 数据存储和管理:上位机可以对下位机采集到的数据进行存储和管理,方便后续的分析和应用。
三、上下位机设计的基本原则在设计上下位机时,需要遵循以下基本原则:1. 可靠性:上下位机的设计应具有良好的稳定性和可靠性,能够长时间稳定运行。
2. 扩展性:上下位机的设计应具有良好的扩展性,方便后续的功能扩展和升级。
3. 可维护性:上下位机的设计应具备良好的可维护性,便于故障的排除和维护。
4. 易用性:上下位机的设计应尽量简化操作流程,提供友好的用户界面,便于操作和使用。
四、上下位机的功能模块设计上下位机的功能模块设计是上下位机设计的核心部分,主要包括以下几个模块:1. 数据采集模块:负责采集下位机的数据,可以通过传感器、AD模块等实现数据的采集。
2. 数据处理模块:负责对采集到的数据进行处理和分析,可以包括数据滤波、数据校正、数据转换等处理操作。
3. 控制模块:负责控制下位机的执行器,可以通过发送控制指令来实现对下位机的控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2014—2015学年第二学期期末考试
《单片机下位机开发实训》实践考核
项目设计说明书
专业:
学号:
姓名:
任课教师:
年月日
2014-2015学年度第二学期期末考试
《单片机下位机开发实训》实践考核成绩报告单
排课编号:(2014-2015-2)-2014226-09341-1批阅日期:2015年月日
姓名
班级
串口通信编程调试
根据串口通信的效果和速度计分
10
课堂表现
根据学生的出勤和课堂表现评分
10
下位机应用设计报告
根据设计报告的格式和内容评分
20
合计
100
考核成绩
任课教师签字
复核人签字分
备注
线路板焊接
评价焊接速度和焊接质量
10
串口屏的使用
根据显示效果和调试时间计分
10
键盘编程与调试
根据键盘编程的效果和速度计分
10
屏幕菜单编程调试
根据屏幕菜单的效果和速度计分
10
读ID号编程调试
根据读ID号的效果和速度计分
10
充值消费编程调试
根据充值消费的效果和速度计分
10