第1讲PROE运动仿真基础-四连杆机构.
基于proe的机构运动仿真ppt课件

编辑版pppt
22
四、运动环境
4. 阻尼
与弹簧不同,阻尼为耗散力,它可以作用于连接轴、两主体 之间、槽运动副。 直接点击按钮 ,其中C为阻尼系数。
编辑版pppt
23
四、运动环境
5. 力/扭矩
可以通过力/扭矩来模拟机构运动的外部环境。 直接点击按钮 其类型分为“点力”与“主体扭矩”,即力与扭矩。和其他 矢量相同,定义需要指出“模”和“方向”。
编辑版pppt
17
2. 齿轮(续)
三、运动副
齿轮类型分为一般、正、锥、涡轮、 齿条与小齿轮。
对于所有类型,需对每一个齿轮选 取连接轴,传动比一般都采用齿数比的 方式予以确定。
对于齿条类,齿条的定义通常需要 指出“滑动杆”连接轴,传动比定义一 般使用 mm/rev,即齿轮旋转一周,齿条 前进的距离。
30
1. 回放
六、获取结果
使用回放功能主要可以实现运动干涉检测、创建运动包络和动 态影像捕捉。指令为点击按钮
创建运动包络
保存为*.fra文件
播 放 动 画
逆向播放 重新开始
上一帧 循环播放
停止
编辑版pppt
捕捉为图片 或动态影像
正向播放 快进至结尾 下一帧 结尾处反转
31
➢回放:轨迹曲线
轨迹曲线用来表示机构中某一元素相对于另一零件的运动。分为“轨迹曲线”与 “凸轮合成曲线”两种: “轨迹曲线”表示机构中某一点或顶点相对于另一零件的运动。 “凸轮合成曲线”表示机构中某曲线或边相对于另一零件的运动。
编辑版pppt
18
2. 齿轮(续)
实例演练
三、运动副
编辑版pppt
19
四、运动环境
1. 重力
机械原理四连杆机构

图4-6 利用死点夹紧工件的夹具
二、双曲柄机构
两连架杆均为曲柄的铰链四杆机构称 为双曲柄机构。行 双曲柄机构,或称平行四边形机构,它 的连杆与机架的长度相等,且两曲柄的 转向相同、长度也相等。由于这种机构 两曲柄的角速度始终保持相等。且连杆 始终作平动,故应用较广。 当四个铰链中心处于同一直线如图 4-9a)所示时,将出现运动不确定状态, 例如在图4-9b)中,当曲柄1由AB2转到 AB3时,从动曲柄3可能转到DC3’,也可 能转到DC3’’。
第四章 连杆机构
平面连杆机构是将各构件用转动 副或移动副联接而成的平面机构。
最简单的平面连杆机构是由四个 构件组成的,简称平面四杆机构。它 的应用非常广泛,而且是组成多杆机 构的基础。
§4-1 铰链四杆机构的基本形式 和特性
全部用回转副组成的平面四杆机构 称为铰链四杆机构,如图4-1所示。
连杆
机架
连 架 杆
图4-1 铰链四杆机构
图中,机构的固定件4称为机架;与 机架用回转副相联接的杆1和杆3称为连 架杆;不与机架直接联接的杆2称为连杆。 另外,能做整周转动的连架杆,称为曲 柄。仅能在某一角度摆动的连架杆,称 为摇杆。
对于铰链四杆机构来说,机架和连杆 总是存在的,因此可按照连架杆是曲柄还 是摇杆,将铰链四杆机构分为三种基本型 式:
图4-11 起重机起重机构
两摇杆长度相等的双摇杆机构,称 为等腰梯形机构。 图4-12所示,轮式车辆的前轮转向 机构就是等腰梯形机构的应用实例。
图4-12 汽车前轮转向机构
当车转弯时,与前轮轴固联的两个 摇杆的摆角和不等。如果在任意位置 都能使两前轮轴线的交点P落在后轮轴 线的延长线上,则当整个车身绕P点转 动时,四个车轮都能在地面上纯滚动, 避免轮胎因滑动而损伤。等腰梯形机构 就能近似地满足这一要求。
基于ProE的连杆机及运动仿真分析
基于PRO/E的连杆机构设计及远动仿真分析摘要连杆机构是机械中常见的一种机构,是往复式内燃机的主要工作机构。
曲柄连杆机构是发动机实现工作循环,完成能量转换的主要远动零件。
虚拟装配与远动仿真是根据产品的形状特征.精度特性,利用计算计图形学和仿真技术,在计算机上模仿产品的实际装配过程.仿真模拟机器的远动过程。
通过对曲柄连杆机构进行有关运动学和理论分析与计算机仿真分析,利用PRO/E软件的装配功能,将曲柄连杆机构的各组成零件装配成活塞组件.连杆组件和曲柄组件,从而完成内燃机曲柄连杆机构的虚拟装配与运动仿真。
在内燃机的开发设计阶段应用这种方法可以大大缩短产品的开发周期,减少样机实验次数,快速的对市场做出反应,降低产品的成本,提高企业的竞争力。
关键词:曲柄连杆机构:虚拟装配:运动仿真;装配功能Based on Pro/E internal combustion engine connecting rod assembly and motion simulation of the virtualAbstractThe crank is a common machinery, reciprocating internal engine is the main working body. Crank the engine duty to achieve of the main moving parts of energy. Virtual and motion simulation based on tee shape of product precision features the use of computer graphics and simulation technology, the product on the computer to imitate the actual assembly process the movement of the machine Crank through the relevant kinematics and dynamics of the theoretical analysis and computer simulation analysis, the use of Pro/E, assembly features, the crank assembly of the constituent parts into a piston, connecting rod assemblies and crankshaft components, to complete the internet combustion engine connecting rod assembly and motion simulation of the virtual. The development of internal combustion engine design using this method can greatly shorten the product development cycle and reduce prototype test times, respond quickly to market, lower product costs and improve the competitiveness of enterprises.Keywords: crank Vrtual assembly; Motion simulation;assembly features目录1绪论 (5)1.1本课题研究的目的和意义 (6)1.2国内外的研究现状及发展趋势 (7)2设计的方案 (9)2.1研究的基本内容 (9)2.1.1连杆机构的结构设计 (9)1手压抽水机的结构特点 (9)2手压抽水机的设计 (9)3连杆机构的装配 (13)3.1手压抽水机的装配 (13)3.2伺服电动机定义 (22)3.3运动分析定义 (23)4本文总结 (24)5参考文献 (25)6致谢 (26)1绪论1.1本课题研究的目的和意义基于虚拟现实的产品虚拟拆装技术在新产品开发、产品的维护以及操作培训方面具有独特的作用。
ProE的运动仿真在平面四杆机构教学中的应用

■■■■雕燃燃翁熏㈣曩凰阙Pro/E的运动仿真在平面四杆机构教学中的应用谢朝晖益阳电子工业学校41 5000簿罄一j i¨:¨|¨i};ii i i i启动P r o/E,新建文件:选“零入实体装配环境。
运动仿真可将静止抽象的机构动态化和具体件”/“实体”,文件名默认。
2.2装配机架化,平面四杆机构的教学效果在Pr o/E环境中我们可以使用两次拉伸的方法建立四Pro/E中的装配类型分为约束和连得以淋漓尽致发挥,不仅可以观察到各构件杆机构的第一个构件——机架。
见草绘图接,约束类型相对两零件只能为固定状的组装情况,还可以进行运动仿真和运动分态,而连接可以是活动状态,且组装完成析,是中职《机械基础》课程教学与Pr o/E软(图一)。
件C A E功能应用的完美结合。
1.2生成机架实体后要为完全约束或完全连接定义状态。
蘩键溺i j j矗量二iij搿i?ii蔓f:底板拉伸深度10,圆柱销拉伸深度执行“插入”/“元件”/“装配”,打平面四杆机构:Pro/E;CAE;运动仿真;运动l 2。
如(图二)。
选择“文件”/“保开机架文件s901.prt,约束类型为“缺省”。
分精存副本”,输入新文件名“s901.Prt”。
2.3装配曲柄执行“插入”/“元件”/“装配”,打开曲柄文件s902.pr t,连接类型为“销钉”(图三),即((机械基础》教材所指的铰链连接,运动副为低副中的转动副。
放图二置方式为轴与轴对齐,面与面对齐,并分别1.3生成其余构件实体选择两构件几何特征,操控板显示“完全连为提高效率,可在上述实体的基础接定义”状态。
图四为完成曲柄装配后的效上,再次进行编辑修改,完成后选择“文果图。
Ctrl+Alt+鼠标拖动曲柄,可以动态件”/“保存副本”,输入新文件名观察曲柄绕机架圆柱销转动情况。
“s902.prt”,继续进行编辑修改,完成后“保存副本”,表1为各文件名。
引言机构类型判定:最长+最短(180+70在职业中专学校任教机电专业课程多=250)≤其余两杆长度之和(150+130年,后接触Pro/E软件,通过几年的学习,=280),且最短杆为连架杆。
第 1讲 PROE运动仿真基础-四连杆机构.
五、分析 1、类型:运动学; 2、终止时间:1--3 sec; 3、桢频:100-200; 4、若有“快照” ,点“快照”,“运行”。 六、回放 1、播放; 2、生成视频:在“播放”的“动画”窗口内,点“捕获”,输入“路 径”、文件名。 七、分析结果(测量):分析测量 1、新建“测量点”:测量点1(摇杆的位置)、测量点2(摇杆的速度)、 测量点3(摇杆的加速度); 2、按ctrl选多个测量点、复选“分别绘制”、选“结果集”中仿真分析名 称; 3、点左上角 “绘制”图标,再点“文件”——“输出EXCEL文件”。 八、绘制曲线 轨迹曲线——纸零件(选装配图或机架)——选取点——选“结果集”— —确定
(采用普通装配的方式进行约束)
1、刚性:采用普 通装配的方式进行 约束;(自动) 2、焊接:采用坐 标系进行约束; (缺省)
(垫片)
SVA
四连杆机构
一、装配 1、机架(左):缺省方式; 2、机架(右):前面、底面对齐,右面相距120; 3、曲柄、连杆:销钉; 4、摇杆:两个销钉(在“放置”页左下点“新设置”, 添加第2销钉); “应用”——“机构”,进入仿真界面 二、设置运动副(凸轮副、齿轮副) 三、设置电机 1、电机位置(类型):拾取“销钉运动副”; 2、电机大小(轮廓):速度、A为360 deg/sec。 四、调整:手形“拖动”图标,进行调整,“快照”确定当 前位置。
参照下图,设计一万向连接传动机构,结构、尺寸 均自己设计确定,并装配、运动仿真、分析。
缺省专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料专业资料sva专业资料专业资料专业资料四连杆机构一装配1机架左
四连杆机构 PPT课件

四、运动的连续性
连杆机构的运动连续性:指该机构在运动中能够连续 实现给定的各个位置。
(B’)B
C1
C C2
1
C1 C3 C2
A
D
B1 B3
2
A
B2
D
C’1 C’ C’2
连杆机构的运动不连续的问题:错位不连续;错 序不连续。
§2-3平面四杆机构的设计
一、平面连杆机构的功能及应用 1、实现刚体给定位置的设计: 机构具有能引导刚
连杆
在连架杆中,能
连架杆 1
2
绕其轴线回转360° 3 连架杆 者称为曲柄;仅能
4 机架
绕其轴线往复摆动 者称为摇杆。
1)曲柄摇杆机构:两连架杆中,一个为曲柄,而 另一个为摇杆。 2)双曲柄机构 两连架杆均为曲柄。 3)双摇杆机构 两连架杆均为摇杆。
三、平面四杆机构的演变
1)取不同构件为机架(机构的倒置)
2)若不满足杆长和条件,该机构只能是双摇杆
机构。
注意:铰链四杆机构必须满足四构件组成的封闭多边形
条件:最长杆的杆长<其余三杆长度之和。
曲柄滑块机构有曲柄的条件
B’ B
b e
Ea
Bb
C”
b
A
C
B’’ D ∞
B 1)a为最短杆
2) a+e≤b.
导杆机构有曲柄的条件
a A
d
C
摆动导杆机构 B
1)a为最短杆,a+ed
dd
a b
b a
c c
d c a b
(b c) (c b)
dd
a b
d c
平面连杆机构有曲柄的条件: 1)连架杆与机架中必有一杆为四杆机构中的最 短杆;
四连杆机运动学讲解
栏杆机四杆机构运动学分析1 四杆机构运动学分析1.1 机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。
还可以根据机构闭环矢量方程计算从动件的位移偏差。
上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。
机构运动分析的方法很多,主要有图解法和解析法。
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。
而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。
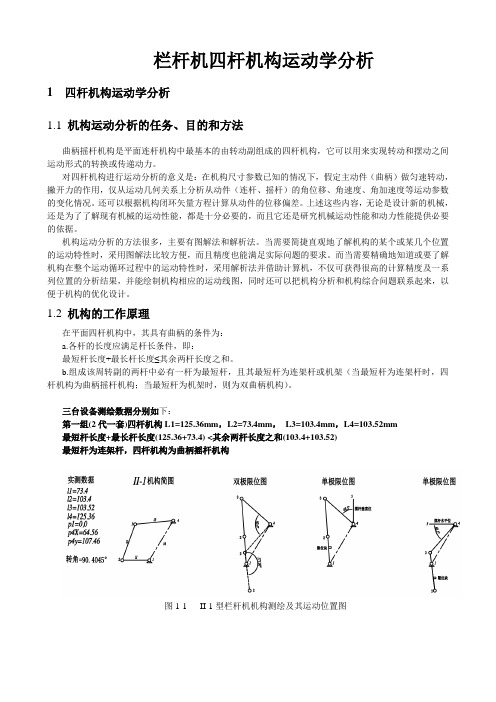
1.2 机构的工作原理在平面四杆机构中,其具有曲柄的条件为:a.各杆的长度应满足杆长条件,即:最短杆长度+最长杆长度≤其余两杆长度之和。
b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。
三台设备测绘数据分别如下:第一组(2代一套)四杆机构L1=125.36mm,L2=73.4mm,L3=103.4mm,L4=103.52mm最短杆长度+最长杆长度(125.36+73.4) <其余两杆长度之和(103.4+103.52)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-1 II-1型栏杆机机构测绘及其运动位置图第二组(2代二套)四杆机构L1=125.36mm,L2=50.1mm,L3=109.8mm,L4=72.85mm最短杆长度+最长杆长度(125.36+50.1) <其余两杆长度之和(109.8+72.85)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-2 II-2型栏杆机机构测绘及其运动位置图第三组(3代)四杆机构L1=163.2mm,L2=64.25mm,L3=150mm,L4=90.1mm最短杆长度+最长杆长度(163.2+64.25) <其余两杆长度之和(150+90.1)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-3 III型栏杆机机构测绘及其运动位置图在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。
常用机构(四连杆机构)ppt课件
d min 或 d max 可能最小
曲柄摇杆机构,当曲柄主动时,在曲柄与机架共线的两个位置 之一,传动角最小.
23
死点
• 死点:
• 传动角为零=0(连杆与从动件共线),机构顶死
C
C
C2
2
1
3
B
B
vF
B1 =00
1
A
B2
4
=00
A
B2
D
=00
B
=00
C1
C
C
1
F
2
v
24
克服死点的措施
B2
22
2 22
C 3
C 3
C
3
3
C
43 C44 4
4C4 4 44C
4 14 4
A
16
(3)扩大回转副 ——偏心轮机构
曲柄摇杆机构中,将曲柄上的转 动副B的半径扩大至超过曲柄的 长度,曲柄变成一个几何中心 与回转中心不重合的圆盘,称 为偏心轮。
提高偏心轴的强度和刚 度、简化结构
• 曲柄滑块机构 (扩大回转副)
28
二. 平面四杆机构的设计
设计类型 1.实现连杆给定位置 2.实现预定运动规律
例如:从动件的急回运动特性 3.实现预定运动轨迹
方法:解析法、作图法、实验法
29
1. 实现连杆给定位置机构
如实现预定的连杆位置要求 机构能引导刚体(一般为连杆)通过一系列给定位置
例:飞机起落架机构: • 要求实现机轮放下和收
180 K 1
K 1
• K=1, 无急回特性
• ↑K↑急回特征越显著
B
1
1
A
1