通用型六自由度工业机器人的运动学分析①
六自由度机械手运动分析甄选
六自由度机械手运动分析甄选机械手是一种由多个自由度组成的机械装置,用于完成各种工业操作任务。
在机械手中,自由度指的是机械手能够独立运动的自由方向的数量。
常见的机械手有三自由度、四自由度和六自由度等不同类型。
在本文中,我们将重点讨论六自由度机械手的运动分析和甄选。
六自由度机械手是指具有六个独立自由度的机械手,每个自由度对应着机械手的一个运动方向。
六自由度机械手一般由基座、腰、肩、肘、腕和手等部分组成,每个部分对应着机械手的一个自由度。
这种机械手具有广泛的应用领域,例如在装配、焊接、喷涂、搬运等工业生产过程中的自动化操作。
在进行六自由度机械手的运动分析时,首先需要确定机械手各个部分的运动轴线和相对于基座的位置关系。
这样可以建立坐标系,在该坐标系中描述机械手的运动。
然后,需要确定机械手各个部分的运动范围和限制条件,以及各个部分之间的运动耦合关系。
通过这些分析,可以得到机械手的运动方程和逆运动学解,从而实现对机械手的运动控制。
在甄选六自由度机械手时,需要考虑以下几个关键因素:1.负载能力:机械手的负载能力是指机械手能够承受的最大负载重量。
在甄选机械手时,需要考虑需要处理的工件的重量,选择适当的机械手负载能力。
2.工作范围:机械手的工作范围是指机械手能够覆盖的工作空间。
在甄选机械手时,需要考虑需要处理的工件的尺寸和形状,选择能够满足工作范围要求的机械手。
3.精度要求:机械手的精度是指机械手能够实现的运动精度。
在甄选机械手时,需要考虑需要处理的工件的精度要求,选择能够满足精度要求的机械手。
4.控制系统:机械手的控制系统是指用于实现机械手运动控制的硬件和软件系统。
在甄选机械手时,需要考虑机械手的控制系统是否能够满足实际应用的需求。
5.价格和性能比较:机械手的价格是一个重要的考虑因素,同时也需要综合考虑机械手的其他性能指标,如速度、加速度、稳定性等,进行综合评估和比较。
在机械手的甄选过程中,可以借助计算机仿真和虚拟现实技术,对不同的机械手方案进行模拟和评估。
六自由度机器人运动学分析
六自由度机器人运动学分析殷固密,王建生(五邑大学智能制造学部,广东江门529020)0引言随着中国制造2025和工业4.0的提出与发展,机器人在“机器换人”和提高社会生产力中扮演着不可或缺的重要位置。
为了使机器人平稳准确地完成指定任务,机器人的运动学分析是必不可少的。
其中,机器人运动学分析的基础就是D-H 参数建立和正逆运动学求解及验证。
通过基础分析,可以帮我们了解机器人的工作方法,揭示机构的合理运动方案和控制算法。
结合使用仿真软件的计算可视化,可以更直观地体现机器人的设计效果,及时发现缺点和不足并改正。
以库卡机器人KR16-2,一种末端三关节轴线相交于一点的六自由度工业机器人为研究对象,通过Craig 和Spong 两种不同的D-H 法则(全称Denavit-Hartenber)对该机器人机型进行运动学建模,推导出机器人正逆运动学模型,并利用MATLA 及Robotics Toolbox 进行运动学分析仿真验证。
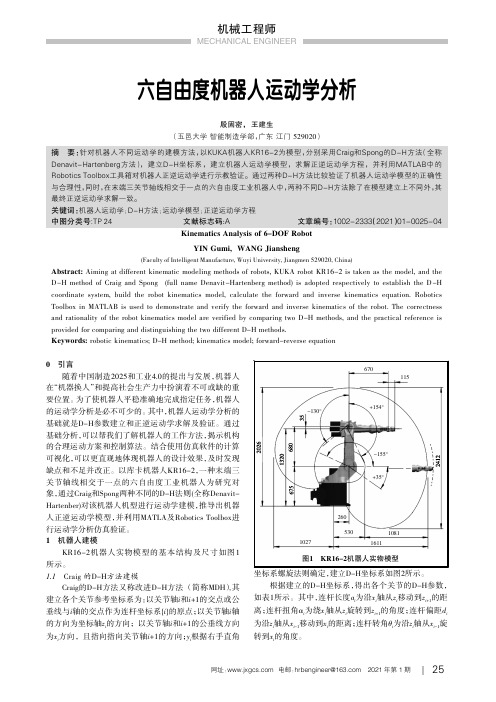
1机器人建模KR16-2机器人实物模型的基本结构及尺寸如图1所示。
1.1Craig 的D-H 方法建模Craig 的D-H 方法又称改进D-H 方法(简称MDH ),其建立各个关节参考坐标系为:以关节轴i 和i+1的交点或公垂线与i 轴的交点作为连杆坐标系{i }的原点;以关节轴i 轴的方向为坐标轴z i 的方向;以关节轴i 和i+1的公垂线方向为x i 方向,且指向指向关节轴i+1的方向;y i 根据右手直角坐标系螺旋法则确定,建立D-H 坐标系如图2所示。
根据建立的D-H 坐标系,得出各个关节的D-H 参数,如表1所示。
其中,连杆长度a i 为沿x i 轴从z i 移动到z i+1的距离;连杆扭角αi 为绕x i 轴从z i 旋转到z i +1的角度;连杆偏距d i 为沿z i 轴从x i -1移动到x i 的距离;连杆转角θi 为沿z i 轴从x i -1旋转到x i 的角度。
摘要:针对机器人不同运动学的建模方法,以KUKA机器人KR16-2为模型,分别采用Craig和Spong的D-H方法(全称Denavit-Hartenberg方法),建立D-H坐标系,建立机器人运动学模型,求解正逆运动学方程,并利用MATLAB中的Robotics Toolbox工具箱对机器人正逆运动学进行示教验证。
六自由度机械手的坐标建立及运动学分析
第**卷第**期20**年*月机械工程学报JOURNAL OF MECHANICAL ENGINEERINGVo l.** No.**** 20**DOI:10.3901/JME.20**.**.***六自由度机械手的坐标建立及运动学分析摘要:从运动学分析的基础上着手研究轨迹控制的问题,利用运动学逆解的方式分析复杂轨迹运动的可行性和实用性。
通过建立机械手的笛卡尔坐标系,推导出机械手的正、逆运动学矩阵方程,并研究了正、逆运动学方程的解;在此基础上建立机械手的工作空间,并讨论其工作空间的灵活性和存在可能性。
因此本文的另一种方式对六自由度串联机械手的复杂运动控制问题进行研究,提出以机械手示教手柄引导末端执行器对复杂运动轨迹进行预设计。
然后通过记录程序进行复杂轨迹的再实现,再对记录程序进行预修改,最终通过现有的程序进行设计编程完成复杂轨迹设计任务。
并利用MATLAB对轨迹进行仿真,对比其实际与计算的正确性。
最后本设计通过六自由度串联机械手实现平面文字轨迹,得出其设计的方式。
即首先利用示教手柄实现轨迹预设,记录预设轨迹程序,然后再对比程序初始化坐标进行手动编程。
关键词:六自由度机械手,笛卡尔坐标系,运动学方程,仿真,示教手柄The coordinates of six degrees of freedom manipulator and kinematics analysis is establishedWU Yanchao JIN Yuanxun ZHAO Xin LI Daohai SONG Ping MENG Ya ABSTRACT:T his article based on the analysis of kinematics to study the trajectory control problems, use of inverse kinematics of the complex mode of tracking movement of the feasibility and practicality. Through the establishment of the manipulator Cartesian coordinates, derived manipulator is the inverse kinematics matrix equation and the study is the inverse kinematics of the equation solution on the basis of this establishment manipulator working space. And discuss their work space The flexibility and the possibility exists.So in another way to the six degrees of freedom series manipulator motion control the complex issues of research, to handle the machinery Shoushi guide for the implementation of the end of the complex pre-designed trajectory. Then track record of the complicated procedure to achieve, and then record the pre-amended procedures.The eventual adoption of the existing procedures designed trajectory design of complex programming tasks. And using MATLAB simulation of the track, compared with its actual calculation is correct.The final design through six degrees of freedom series manipulator track to achieve flat text, draw their design approach. That is, first of all use of teaching handle achieve trajectory default the track record of default procedures, and then compared to manual procedures initialized coordinate programming.key words:Six degree-of-freedom manipulators,Cartesian coordinates, Equations of motion,Simulation, Demonstration handle机 械 工 程 学 报 第49卷第6期前言基于六自由度串联机械手的复杂运动控制的研究,期望通过一种使用的轨迹设计方法,即利用六自由度串联机械手实现平面复杂运动轨迹的设计,使其能在不同的工业生产下完成预定的轨迹实现的准确性和实用性,则该机械手将在实在加工工业中发挥更重要的作用,并可完成许多人工条件无法完成的任务,从而提高机械手的利用性。
六自由度机器人

VME运动控制器六自由度机器人概 述六自由度机器人是一种典型的工业机器人,在自动搬运、装配、焊接、喷涂等工业现场中有广泛的应用。
固高科技GRB 系列六自由度机器人是固高成熟完备的运动控制技术与先进的设计和教学理念有机结合的产物,既满足工业现场要求,也是教学、科研机构进行运动规划和编程系统设计的理想对象。
该机器人采用六关节串联结构,各个关节以“绝对编码器电机+精密谐波减速器”为传动。
在小臂处留有安装摄像头、气动工具等外部设备的接口,并提供备用电气接口,方便用户进行功能扩展。
机器人的控制方面,采用集成了PC 技术、图像技术、逻辑控制及专业运动控制技术的VME 运动控制器,性能可靠稳定,高速高精度。
主要特点开放式控制实验平台z 基于VME 总线高性能工业运动控制器的开放式平台,支持用户自主开发; z 通用智能运动控制开发平台,采用VC++或OtoStudio 计算机可编程自动化控制系统开发工具z 配备图形示教功能,便于机器人的编程操作和应用培训; z 配套内容详尽的操作手册和学生实验指导书,通过实例演示,引导用户操作并学习如何基于运动控制器开发各种应用软件系统。
工业化设计与制造z 按照工业标准设计和制造;z 机构设计成6轴串联旋转式关节,各关节采用绝对型编码盘交流伺服电机驱动,谐波减速器传动;z 模块化结构,简单、紧凑,预留电气与气动标准接口;z 较高的负载、更快的轴动作速度、大的许用扭矩和转动惯量使机器人应用广泛,可用于搬运,点焊,装配,点胶,切割,喷涂等行业;z 具备最大的工作半径和最小的干涉半径,工作范围大,在系统设计上提供较大的灵活性,夹具、剪丝机等设备可以采用更高效的安装方式;控制软件采用VC++开发的控制系统采用OtoStudio开发的控制系统基于OtoStudio软件环境开发的六自由度机器人接口界面OtoStudio是固高科技开发的计算机可编程自动化系统开发平台。
它支持完整版本的IEC61131标准的编程环境,支持标准的六种编程语言,是一个标准的软件平台,被很多硬件厂家支持,除了支持PLC编程,还支持总线接口、驱动设备(特别是伺服、数控)、显示设备、IO设备等的编程。
六自由度机械手的坐标建立及运动学分析
六自由度机械手的坐标建立及运动学分析1.坐标建立:在六自由度机械手的坐标建立中,一般采用DH约定法(Denavit-Hartenberg法)来建立坐标系。
DH法是一种常用的方法,能够简化坐标系的描述,方便运动学分析。
首先,根据机械手的实际结构和运动方式,确定基座系(O-1-X1-Y1-Z1)和工具系(O-6-X6-Y6-Z6)两个坐标系。
其中,基座系固定在机械手的基座上,而工具系固定在机械手臂的末端执行器部分。
然后,根据机械手的连杆关系,逐个确定每个连杆的坐标系。
对于每个连杆的坐标系,可以通过以下几个步骤确定:1)确定连杆旋转轴,选择旋转轴为Z轴。
2)确定连杆的连杆中心线与相邻连杆中心线的夹角,选择夹角为连杆坐标系的转角θ。
3)确定连杆坐标系的原点与相邻连杆坐标系的原点之间的距离,选择距离为连杆坐标系的运动方向z。
4)确定连杆坐标系的x轴,通过右手定则确定。
根据以上步骤,可以逐个确定各个连杆的坐标系,最终建立整个六自由度机械手的坐标系。
2.运动学分析:运动学正解是指通过给定每个关节的转角,计算末端执行器的位置和姿态。
运动学正解的计算可以采用连乘法则,从基座系逐步向前计算每个连杆的变换矩阵,最终得到末端执行器的变换矩阵。
运动学逆解是指通过给定末端执行器的位置和姿态,计算每个关节的转角。
运动学逆解的计算可以通过逆运动学方法实现,其中一种常用的方法是通过解析法,通过求解多元非线性方程组得到关节转角的解析解。
在进行运动学分析时,还需要考虑机械手的工作空间限制、奇异位置的问题以及碰撞检测等。
因此,在实际运动学分析中,可能需要进行机器人的轨迹规划和路径规划。
总结:六自由度机械手的坐标建立和运动学分析是机械手设计和控制的基础。
通过建立机械手的坐标系,可以方便地描述六自由度机械手的结构和运动方式。
而运动学分析可以通过运动学正解和逆解,实现机械手的位置和姿态的计算。
熟练掌握六自由度机械手的坐标建立和运动学分析,对于机械手的设计和控制具有重要意义。
六自由度并联机器人运动学、动力学与主动振动控制
振动控制概述
01
02
03
振动危害
机械系统中的振动可能导 致设备损坏、工作效率降 低以及安全隐患。
振动控制方法
主动振动控制、被动振动 控制和半主动振动控制。
主动振动控制优势
能够实时监测和抑制机械 振动,提高设备性能和安 全性。
主动振动控制策略
基于模型的主动振动控制
01
利用系统模型进行预测和控制。
基于数据的主动振动控制
医疗应用
在医疗领域,六自由度并联机器人可以用于微创 手术和精确的定位,提高手术的准确性和效率。
3
农业应用
农业领域可以利用六自由度并联机器人进行自动 化采摘、分拣等作业,提高生产效率并降低人力 成本。
发展与展望
技术创新
随着机器人技术的不断发展,六自由度并联机器人的性能和稳定性 将得到进一步提升,同时将涌现出更多的应用场景。
结构设计
六自由度并联机器人的结构设计对其性能具有重要影响, 因此需要开展深入的研究以提高机器人的刚度、精度和稳 定性。
主动振动控制
在高速运动过程中,六自由度并联机器人容易产生振动, 需要进行主动振动控制研究以减小振动对机器人性能的影 响。
感谢您的观看
THANKS
六自由度并联机器人实验 平台与实验研究
实验平台介绍
硬件组成
由6个伺服电机、6个旋转关节 、1个移动关节、1个机身和1
个控制箱组成。
软件系统
采用PC+运动控制卡的模式,使用 自主开发的软件进行实时控制。
实验场地
机器人在实验台上进行实验,环境 条件稳定。
运动学实验研究
逆运动学
通过给定目标位姿,求解关节角 度。
六自由度并联机器人运动学 、动力学与主动振动控制
通用型六自由度工业机器人的运动学分析
通用型六自由度工业机器人的运动学分析作者:杨煜俊陈洵凛来源:《科技资讯》2017年第03期摘要:针对六自由度工业机器人运动学分析和轨迹规划过程中的计算烦琐问题,以通用型六自由度工业机器人为研究对象,在Matlab环境下,利用Robotics Toolbox工具箱对该机器人进行运动学建模,并建立该机器人的D-H模型,对其进行运动学求解和轨迹规划与仿真。
实验表明,Robotics Toolbox工具箱极大地简化了通用型六自由度工业机器人运动学分析的正、逆解的求解过程,并且能直观地显示机器人的运动特性、参数和轨迹。
对通用型这类六自由度工业机器人的研究与应用具有重要的价值。
关键词:工业机器人 Robotics Toolbox 运动学求解轨迹规划仿真中图分类号:TP391.9 文献标识码:A 文章编号:1672-3791(2017)01(c)-0097-04机器人是当代新科技的代表产物,是高新技术的代表。
随着计算机技术的发展,机器人科学与技术也得到了迅速发展。
在工业机器人的研究中,由于其价格昂贵,对用实物机器人进行实践学习的普及难度较大,因此机器人的软件仿真实验变得非常重要。
对机器人进行软件仿真实验,可以模拟出机器人的运动情况图像,更加直观地显示了机器人的运动参数与轨迹特征,从而有利于分析很多重要的信息。
在机器人的运动仿真这块,很多学者都进行了相关的研究。
例如:文献[1]以一个五自由度护理机器人为例,利用Robotics Toolbox工具箱对其进行运动学建模与求解;文献[2]以一个SCARA机器人为例,利用Robotics Toolbox工具箱来讨论标准D-H参数和改进D-H参数建模方法的区别,并对其轨迹规划仿真;文献[3]以Cincinnati T3-746机器人为例,对其运动学轨迹规划进行了分析与仿真,但以上所建立的机器人模型只能适用于相应的机器人运动学研究。
一种通用的、能通过简单修改便可适用于任何一种通用型六自由度工业机器人的仿真方法显得尤其重要。
六自由度机器人运动学及主要构件的有限元分析
第6期2021年2月No.6February ,2021六自由度机器人运动学及主要构件的有限元分析摘要:文章以六自由度机器人为研究对象,根据实际的作业情况,对机器人进行运动学分析以及主要构件的有限元分析。
运动学分析分为正运动学分析和逆运动学分析,解决的是机器人的手臂转向何方,分析的是手部的速度、加速度和位移。
有限元分析主要是机械系统静力学分析。
对主要构件建立模型、模型简化、网格划分,根据危险工况的受力情况,分析了各构件的应力、形变等性能,确保结构设计合理。
对于工业机器人机械结构、传动等方面,运动学和有限元分析能够判断整机设计是否达到设计目标,对结构件的优化设计具有重要的意义。
关键词:六自由度;机器人;运动学;有限元分析中图分类号:TP242.2文献标志码:A 程锴(南京以禾电子科技有限公司,江苏南京210039)作者简介:程锴(1981—),男,江苏南京人,工程师,硕士;研究方向:电子产品总体结构设计。
江苏科技信息Jiangsu Science &Technology Information引言在当前科学技术不断进步和快速发展的背景下,很多先进的技术手段被广泛应用在各个领域中[1]。
特别是机器人在工业中得到广泛的应用,在实际运行过程中,类似于码垛搬运的六自由度机器人在搬运货物中节省大量劳动力,但安全性与可靠性一直备受考验。
因此,本文主要对六自由度机器人进行运动学和静力学分析[2]。
机器人运动学研究解决的是机器人的手臂转向何方,分析的是手部的速度、加速度和位移。
运动学方程是进行机器人位移分析的基本方程,也称为位姿方程。
机器人运动学分为正运动学分析和逆运动学分析。
正运动学是机器人运用各个关节角度、各个构件车长度等已知条件来判断末端执行器在三维空间中的位置;而逆运动学正好相反,它解决的是机器人需要如何运动才能使得末端执行器到达指定位置这一问题。
静力学分析用来分析结构在给定静力载荷作用下的响应。
六自由度机器人运动控制与分析研究
« 电气开关» (2021. No. 6)
文章编号:1004 - 289X(2021)06 - 0022 - 03
六自由度机器人运动控制与分析研究
洪伟程1 ꎬ韩成浩1 ꎬ张译心2 ꎬ张师2
(1 吉林建筑大学研究生院ꎬ吉林 长春 130000ꎻ2 东北电力大学电气
工程学院ꎬ吉林 吉林 132012)
效率和准确性ꎬ以 6 - UPU 并联机器人为研究对象
进行运动仿真分析ꎬ验证其结构设计的合理性和控
制算法的有效性ꎮ 文献[7] 对六自由度机器人的机
械臂进行正向运动学建模ꎬ运用解析法进行逆运动
研究已经取得了一些成果:文献[4] 以六自由度机
学求解ꎬ运用蒙特卡罗法分析其工作空间ꎬ并验证模
器人为研究对象ꎬ进行运动学分析ꎬ设计并优化逆解
23
« 电气开关» (2021. No. 6)
2 六自由度机器人运动控制设计
六自由度机器人运动控制系统主要包括上位
PC 机、运动控制器、伺服系统和限位报警传感器等
部分组成ꎬ控制系统图如图 1 所示 [8] ꎮ PC 机的主要
作用是可视化处理与参数计算ꎬ让使用者能够实时
了解机器人的运动状态ꎮ 运动控制器由 STM32 与
阵相乘ꎬ得到最后结果:
图 1 控制系统图
运动控制器硬件采用 STM32 + FPGA 的结构ꎬ
基于 STM32 的高速 SPI 接口扩展 W5500 以太网控
制器ꎬ实现运动控制器和 PC 机的以太网通信ꎮ
基于 PC 机 + 运动控制器结构组成的机器人控
制系统软件设计ꎬ可分为 PC 机应用程序软件设计
器人运动控制器设计[ J] . 机械设计与制造ꎬ2020(4) :240 - 243.
六自由度工业机器人运动分析研究
六自由度工业机器人运动分析研究
杨文;高维
【期刊名称】《信息技术与信息化》
【年(卷),期】2024()4
【摘要】针对某公司研制的六自由度工业机器人,利用D-H方法建立了机器人运动学方程,给出了运动学方程正解和逆解的求解方法。
根据六自由度工业机器人设计参数,利用MATLAB平台对机器人运动学方程的正确性进行了验证。
对六自由度工业机器人进行了轨迹规划和工作空间分析,结果表明,利用相关参数设计的六自由度工业机器人工作空间范围内没有空洞或空腔,关节运动平稳,振动小,可满足实际应用要求。
研究成果可为同类型工业机器人结构设计和运动学分析提供理论支撑。
【总页数】4页(P209-212)
【作者】杨文;高维
【作者单位】湖南信息职业技术学院电子工程学院
【正文语种】中文
【中图分类】TP2
【相关文献】
1.六自由度串联工业机器人运动学标定与实验研究
2.六自由度经济型工业机器人设计与运动学分析
3.轻型六自由度工业机器人设计与运动学分析
4.六自由度工业机器人运动学分析与仿真
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
科技资讯2017 NO.03SCIENCE & TECHNOLOGY INFORMATION工 业 技 术机器人是当代新科技的代表产物,是高新技术的代表。
随着计算机技术的发展,机器人科学与技术也得到了迅速发展。
在工业机器人的研究中,由于其价格昂贵,对用实物机器人进行实践学习的普及难度较大,因此机器人的软件仿真实验变得非常重要。
对机器人进行软件仿真实验,可以模拟出机器人的运动情况图像,更加直观地显示了机器人的运动参数与轨迹特征,从而有利于分析很多重要的信息。
在机器人的运动仿真这块,很多学者都进行了相关的研究。
例如:文献[1]以一个五自由度护理机器人为例,利用Robotics Toolbox工具箱对其进行运动学建模与求解;文献[2]以一个SCARA机器人为例,利用Robotics Toolbox工具箱来讨论标准D-H参数和改进D-H参数建模方法的区别,并对其轨迹规划仿真;文献[3]以Cincinnati T3-746机器人为例,对其运动学轨迹规划进行了分析与仿真,但以上所建立的机器人模型只能适用于相应的机器人运动学研究。
一种通用的、能通过简单修改便可适用于任何一种通用型六自由度工业机器人的仿真方法显得尤其重要。
1 运动学分析1.1 六自由度工业机器人D-H模型建立目前,各大工业机器人厂商提供的通用型六自由度工业机器DOI:10.16661/ki.1672-3791.2017.03.097通用型六自由度工业机器人的运动学分析①杨煜俊 陈洵凛(广东工业大学机电工程学院 广东广州 510000)摘 要:针对六自由度工业机器人运动学分析和轨迹规划过程中的计算烦琐问题,以通用型六自由度工业机器人为研究对象,在Matlab环境下,利用Robotics Toolbox工具箱对该机器人进行运动学建模,并建立该机器人的D-H模型,对其进行运动学求解和轨迹规划与仿真。
实验表明,Robotics Toolbox工具箱极大地简化了通用型六自由度工业机器人运动学分析的正、逆解的求解过程,并且能直观地显示机器人的运动特性、参数和轨迹。
对通用型这类六自由度工业机器人的研究与应用具有重要的价值。
关键词:工业机器人 Robotics Toolbox 运动学求解 轨迹规划 仿真中图分类号:TP391.9文献标识码:A文章编号:1672-3791(2017)01(c)-0097-04①作者简介:陈洵凛(1991—),男,汉,广东雷州人,硕士研究生,研究方向:工业机器人。
杨煜俊(1980—),男,汉,湖北天门人,博士后,副教授,硕士研究生导师,研究方向:工业机器人。
表1 通用型六自由度工业机器人D-H参数图1 通用型六自由度工业机器人图2 六自由度工业机器人的关节坐标系科技资讯2017 NO.03SCIENCE & TECHNOLOGY INFORMATION工 业 技 术人的机械结构、外观上大同小异,相差不大。
从本质上讲,关节布置和机身、臂部、手腕结构基本一致。
如图1所示为通用型六自由度工业机器人的三维模型。
要用计算机对机器人运动进行仿真,首先需要构建相应的机器人对象。
在机器人学的教学中通常把机器手看作是由一系列关节连接起来的连杆构成。
为描述相邻杆件间平移和转动的关系,Denavit和Hartenberg提出了一种为关节链中的每一杆件建立附属坐标系的矩阵方法,通常称为D-H参数法[4]。
根据D-H参数法确立准则,构建六自由度工业机器人的关节坐标系,如图2所示。
由建立的关节坐标系所推出来的连杆间D-H运动学参数如表1所示。
其中参数为连杆转角、i d 为连杆距离、i a 为连杆长度、i 为连杆扭角。
各通用型六自由度工业机器人的区别主要在于D-H参数中的连杆距离i d 和连杆长度i a 的不同。
因此只需要根据不同机器人来改变i d 与i a 的数值,便可对其进行运动学分析和轨迹规划,从而可以得到通过简单修改便可适用于任何一种通用型六自由度工业机器人的仿真方法。
根据一种通用型六自由度工业机器人(如M OTOMAN MH24机器人)的D-H参数可得其1a =150,2a =760,3a =200,图3 六自由度工业机器人运动学模型图4 在笛卡尔空间中仿真与轨迹规划结果图5 在关节空间中仿真与轨迹规划结果图6 各关节的角位移、角速度、角加速度变化曲线1d =505,4d =795,6d =100。
在Matlab环境下,利用Robotics Toolbox工具箱,根据表1和以上确立的D-H参数,以图1所示的位姿为初始位置(i θ[0-pi/2000-pi/2]),运用Link函数建立机器人模型:L1=Link([0 505 150 -pi/2 0],'standard');L2=Link([-pi/2 0 760 0 0],'standard');L3=Link([0 0 200 -pi/2 0],'standard');L4=Link([0 795 0 pi/2 0],'standard');L5=Link([0 0 0 -pi/2 0],'standard');L6=Link([-pi/2 100 0 0 0],'standard');r=SerialLink([L1 L2 L3 L4 L5 L6]);='MH24';theta=[0 0 0 0 0 0];r.plot(theta);上述Matlab程序生成的通用型六自由度工业机器人的模型如图3所示。
1.2 运动学求解机器人运动学主要是研究关节变量空间和机器人末端执行器位置和姿态之间的关系。
常见的机器人运动学问题可归纳为2类:(1)运动学正问题:对给定的六自由度机器人,已知各杆件的几何参数和各关节角矢量,求机器人末端执行器相对于参考坐标系的位置与姿态;(2)运动学逆问题:已知机器人各杆件的几何参数,给定机器人末端执行器相对于参考坐标系的位置与姿态,求机器人能否使其末端执行器达到这个预期位姿。
对于六自由度工业机器人的运动学求解,手工计算是非常烦琐甚至无法得到最终的结果。
因此,运用Robotics Toolbox工具箱对其进行正运动学和逆运动学求解,有利于简化烦琐的计算过程。
以图3中机器人的运动学模型为例,假设机器人各关节运动到1θ=0、2θ=-pi/4、3θ=-pi/4、4θ=0、5θ=pi/2、6θ=0的状态,其相应的正运动学求解即为求解末端执行器位姿矩阵。
则可以在Matlab环境下通过fkine函数直接求得末端执行器位姿矩阵:θ=[0 -pi/4 -pi/4 0 pi/2 0]θ=0 -0.7854 -0.7854 0 1.5708 0T=fkine(MH24,θ)T =1.0000 -0.0000 -0.0000 1482.40.0000 -1.0000 0.0000 0.0000-0.0000 -0.0000 -1.0000 1142.40.00000.0000 0.0000 1.0000得到的T即为末端执行器位姿矩阵。
逆运动求解即为给定末端执行器位姿矩阵,求解对应的关节变量。
如:在已知上述末端执行器位姿矩阵T的情况下,通过ikine 函数求解其对应的关节变量为:i θ=ikine(MH24,T)i θ=0 -0.7854 -0.7854 0 1.5708 0可以看到得到的关节变量i θ的值与原始关节变量θ的值相等,证明了正、逆运动学求解的正确性。
2 运动仿真与轨迹规划为了研究多关节机器人运动学轨迹的连续性和平滑性,可以利用Robotics Toolbox中一种规划函数对机器人的多个关节运动同时进行仿真,其中包括各关节转角的运动规律、关节角速度、关节角加速度。
然后通过绘图函数plot来进行绘图,增加仿真效果的直观性。
轨迹规划通常用样曲线来拟合机器人的运动轨迹,主要有2种形式:点到点的运动轨迹规划和连续点的运动轨迹规划。
以下仿真以点到点轨迹规划为例,分别在笛卡尔空间和关节空间中进行轨迹规划。
已知末端执行器的起始点和目标点的位姿后,可通过逆运动学求解得到2点的关节变量。
假设起始点和目标点的关节变量分别为i θ=[0 0 0 0 0 0]、j θ=[pi/3 -pi/4 -pi/8 0pi/2 0],设置末端执行器从起始点到目标点的时间为2s,则通过Robotics Toolbox工具箱在笛卡尔空间中进行轨迹规划的程序如下:i θ=[0 0 0 0 0 0];j θ=[pi/3 -pi/4 -pi/8 0 pi/2 0];t=0:0.01:2;T=fkine(r,i θ);T1=fkine(r,j θ);traj_1=ctraj(T,T1,length(t));JTA=transl(traj_1);plot2(JTA,'b')在笛卡尔空间中进行轨迹规划的结果如图4所示。
在关节空间中进行轨迹规划的程序如下:i θ=[0 0 0 0 0 0];j θ=[pi/3 -pi/4 -pi/8 0 pi/2 0];t=0:0.01:2;traj_2=jtraj(i θ,j θ,t);JTA=transl(r.fkine(traj_2));plot2(JTA,'b')在关节空间中进行轨迹规划的结果如图5所示。
其中,各关节在仿真过程中角位移、角速度、角加速度的变化情况如图6所示。
从上述图4到图6中,能够直观地看到通用型六自由度工业机器人的运动轨迹、运动特性和各关节的参数变化情况。
如果要执行多个点的轨迹规划,则每段末端求解出来的边界速度和位置都可用来作为下一段的初始条件,每段轨迹都可以用这种方法进行规划和处理。
3 结语该文对通用型这类六自由度工业机器人的研究中,寻求一种(下转101页)(4)使用汇总功能。
3.2 测试数据及测试结果分析(1)测试数据。
按照操作方法,对 500~3000g的盐进行测试,从小到大,然后从大到小,共测量7个来回,共14次。
(2)测试结果与及分析。
重量测试结果与误差分析见表1。
4 结语该设计电路结构简单、精度较高,实际所测的误差达到1%,能对液态商品进行去皮操作以及超重报警功能,具有一定的研发价值。
图2 放大电路原理图参考文献[1]孙娜.基于单片机的便携式电子秤的设计[J].中国科技信息,2012(1):98.[2]程智.简易电子秤的设计[J].电子世界,2013(7):133.[3]严芳芳.基于单片机控制的电子秤设计[J].电子测试,2013(7):35-36.图3 电子秤检测原理图图4 主程序流程图表1 重量测试结果与误差分析通过简单修改便可适用于任何一种通用型六自由度工业机器人的仿真方法。