弹塑性力学基本方程
弹性力学公式
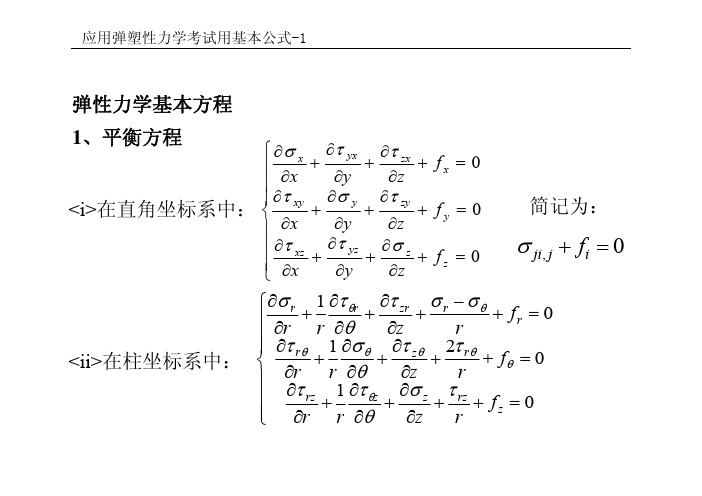
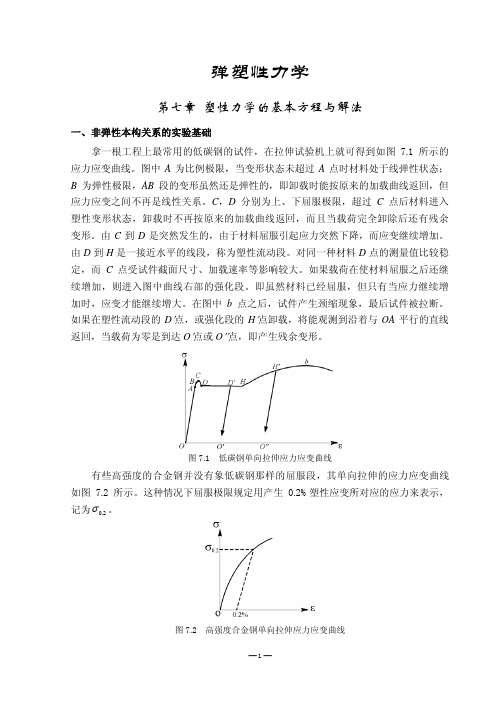
2°斜截面上的正应力:全应力矢量p N 在外法线方向n 上的投影即为斜截面上的正应力σN :=r r m n ⋅r r r r r r nσ=n p n ⋅()()x y z p ip j p k li j k ++++(){}{}x T x y z y n p p l p m p n lmn p n p ⎧⎫⎪⎪=++==⎨⎬l zx yxx ττσ⎫⎧⎟⎞⎜⎛z p ⎪⎪⎩⎭}){(}{)(n n n m n ml ij Tzyzxzzy y xyσστττστ=⎪⎭⎪⎬⎪⎩⎪⎨⎟⎟⎠⎜⎜⎝=即}){(}{n n ij T N σσ=(2-15)j 3°斜截面上的切应力:全应力矢量p N 在斜截面内的投影即斜截面上的切应力分量为:||n n n p τ=×r r ++216或2222222()()n n n x y z x y z p p p p p l p m p n τσ=−=++−(2-16)τxσz4-4、弹塑性力学中常用的简化力学模型44、弹塑性力学中常用的简化力学模型σA B分析计算有困难与实际符合较好1、理想弹塑性模型:o εεsσ⎨⎧>=≤=ss sE E εεεσεεεσ当当s理想弹塑性力学模型⎩Bσ1tg −2、线性强化弹塑性力学模型As σ1E 计算复杂⎨⎧>−+=≤=ss s s E E εεεεσσεεεσ当当)(1εoEtg 1−sε⎩型线性强化弹塑性力学模3、幂强化力学模型:σ1=n 参数少想弹性模型n A n<<=εσ100=n 便于分析理想塑性模型当理想弹性模型当A n A n ====σεσ01ε1幂强化力学模型4、刚塑性力学模型(理想塑性模型)在应力到达屈服极限之前应变为零。
AσB分析计算容易oε刚塑性力学模型5σ(刚塑性力学模型)5.理想塑性力学模型σssσσ=ε6.σ6.理想弹性力学模型εσE =ε4-6、常用屈服条件:对屈服条件的研究已有两个世纪。
工程塑性力学(第四章)弹塑性力学边值问题的简单实例

σθ
−σr
=
2
p
b2 r2
在 r = a 时取最大值,则 r = a 处首先屈服
(σθ
− σ r ) max
=
2
p
b2 a2
=σs
求得弹性极限载荷(压力)为
pe
=
a2σ s 2b2
,
p
=
pe
=
b2 − a2 a2
pe
= σs 2
⎜⎜⎝⎛1 −
a2 b2
⎟⎟⎠⎞
(2)弹塑性解
(4-26)
p > pe 时,塑性区逐渐扩张。设弹、塑性区交界处 r = c , a < c < b 。
b
弹性区
c
用边界条件σ r r=a = − p ,可确定出 C′ = − p − σ s ln a ,
a
所以
⎪⎧σ r ⎨ ⎪⎩σθ
= σ s ln r − p − σ s ln a = − p + σ s
=σs
+σr
=
−p
+ σ s (1 +
ln
r) a
ln
r a
(4-27)
塑性区 图 4-3
属静定问题,未用到几何关系。
ΔFi = F&iΔt , ΔTi = T&iΔt , Δui = u&iΔt
(4-10) (4-11)
式中 F&i ,T&i 和 u&i 分别称为体力率、面力率和位移率(速度)。引入率的表达形式
可以简化公式表达。 求解过程为:
已知时刻 t 时,位移 ui ,应变 εij ,应力σij ,加载面 f (σij ,ξ ) = 0 。在 ST 上给
弹塑性_塑性力学基本方程和解法
在加载过程中物体各点处的偏应力分量 sij 保持比例不变。在工程允许精度下,也可推
广应用于稍为偏离简单加载的情况。
以上各种理论中涉及的一些假设,例如:塑性应变偏量的增在单一的函数关系等假设,都得到了常用金属材
料大量试验的验证。
z 强化规律 对于理想弹塑性材料,材料一旦屈服,其应力状态点在主应力空间中就落在屈服
变形, Hα 也不变,于是
∂f ∂σ ij
除等向强化外,有些强化材料表现为随动强化(图 7.7b),即,在强化过程中,屈
服面的大小和形状保持不变,只随塑性变形的发展而在应力空间中平移。还有些材料
在强化过程中随动强化与等向强化同时发生,称为混合强化。
由于在应力和强化参数空间中,表示应力状态的应力点只可能位于后继屈服面
(或加载面)上或其内,不可能位于曲面之外,若加载面是一个正则曲面,则有
⎯2⎯
研究生学位课弹塑性力学电子讲义
姚振汉
⎧ε = 0 ⎨⎩σ = σ s
当 σ <σs 当 ε >0
(2)
图 7.5 理想弹塑性和刚塑性
当考虑材料强化性质时,可在理想弹塑性模型的基础上加以改进,采用线性强化 弹塑性模型来近似:
⎧σ = Eε
⎨⎩σ = σ s +E1 (ε − εs )
当 ε ≤εs 当 ε >εs
(5)
⎯3⎯
第七章 塑性力学的基本方程与解法
其中 k 可由单向拉伸或其它材料试验测得的σ s 确定, k = σ s 2 。当不能确定主应力的 排序时,在以三个主应力为坐标轴的应力空间中,由特雷斯卡条件所包围的弹性状态 的应力空间为
σ1 −σ 2 ≤ 2k, σ 2 −σ 3 ≤ 2k, σ 3 −σ1 ≤ 2k
弹塑性力学物理方程

z
x
1 2 yx
1 2
zx
1 2
xy
-
1 2
xz
y
-
1 2
yz
-
1 2
zy
z
以最后一个方程为例 zx 反号,而x,y,z和xy不变, c61=c62=c63=c64=0
x =c11x+ c12y+ c13z+ c14xy y =c12x+ c22y+ c23z+ c24xy z =c13x+ c23y+ c33z+ c34xy xy =c14x+ c24y+ c34z+ c44xy yz = c55yz+ c56zx zx = c56yz+ c66zx
x
1
Ex
- yx Ey
- zx Ez
0
0
0
x
y
xy
Ex
1
- zy
Ey
Ez
0
0
0
y
z
xy
yz
xz Ex
0
0
- yz Ey
0
0
1 Ez 0
0
0
0
1
0
G xy
0
1
G yz
0
z
0
xy
0
yz
zx
0
0
0
0
0
1 Gzx zx
1 v E
ij
E
kk ij
弹性应变能
• 一维情况
一细长杆,长度L,横截面积S,两端受拉力P作用,伸长量为L,
外力功为
L
U Pd (L) 0
弹塑性本构关系简介

2) 势能原理的数学表达
应变能
总势能
Ve=Vε+VP =1/2∫VσijεijdV 外力势能
-∫VFbiuidV- ∫SσFsiuidS = min
2 虚力原理
1)虚力原理的表述
给定位移状态协调的充分必要条件为:对 一切自平衡的虚应力,恒有如下虚功方程成 立(矩阵)
∫V[ε]Tδ[σ]dV=∫Su([L]δ[σ])T [u ]0dS
收敛准则
1、位移模式必须包含单元的刚体位移
2、位移模式必须能包含单元的常应变
3、位移模式在单元内要连续、并使相邻单元间的位移必须协调
满足条件1、2的单元为完备单元
满足条件3的单元为协调单元 多项式位移模式阶次的选择——按照帕斯卡三角形选
几何各向同性:位移模式应与局部坐标系的方位无关
多项式应有偏惠的坐标方向,多项式项数等于单元边界结点的自由度总
变间关系为 octσoct
GKtt
oct 3K s oct oct Gs oct
并有
Gs G
1
a
oct
B c
m
KGss
εoct
oct
K G e s
s (c oct ) p
KG
其中G、K分别为初始切线剪切和体积模量,
B c
为混凝土单轴抗压强度,a、m、c和p为由试验
确定的常数。
POCT
弹性张量Dijkl
ij
Dijkl kl
( 2G 1 2
ij kl
2Giklj ) kl
i 1, j 2, k 1,l 2
12
D1212 12
( 2G 1 2
1212
2G1122 )12
11 1 12 0 22 1
弹塑性力学 第二章 应变与几何方程
如:位移分量u、v 、w表示为u1 、u2、u 3,缩写为ui(i=1,2,3) 坐标x、y、z表示为x1、 x2、 x3 ,缩写为xi(i=1,2,3)。 单位矢量i、j、k表示ei(i=1,2,3)。
应力分量:
可表示为:
缩写为: 同理,应变分量可表示为:
z C
A
P
B
O
y
(2) 一点应变状态
z
其中
C
注:
应变无量纲; 应变分量均为位置坐标的函数,即
x
A
P
B
O
z
y
4. 位移
一点的位移 —— 矢量S 量纲:m 或 mm u —— x方向的位移 分量;
O
x
w
S u
P v
位移分量: v —— y方向的位移 分量; w—— z方向的位移 分量。
y
§3-2.几何方程
连续性方程
• 连续性方程是单连体小变形连续的必要和 充分条件。 • 如应变分量满足连续性方程,可保证位移 分量存在。
§3-6.应变率和应变增量
§3-7 位移边界条件
在位移边界问题中,位移分量在边界上还应当满足位移边 界条件 在给定位移的表面Su上
注:在给定某方向的面力后,就不能再给定该方向的位移; 反之亦然。但可某些方向给定位移,其它方向给定面力,即 混合边界条件。
PA=dx C C’ P P’ A A’ B B’ PB=dy PC=dz
研究在oxy平面 内投影的变形,
一点的变形 线段的伸长或缩短; 线段间的相对转动; O 考察P点邻域内线段的变形:
v
变形前 P 变形后
弹塑性力学第03章
xy
v x
u
y
x
1 E
( x
y
)
y
1 E
( y
x
)
or
x
1
E 2
(
x
y
)
y
E 1 2
( y
x
)
xy
2 (1 E
)
x
y
)
xy
E 2 (1
)
xy
及
z 0, 畸变。这种畸变很小,
yzxz 0
并与z无关,而是x,y的
z E (xy)
函数。它可以从此式中 独立地求出。
§3-2 平面问题的应力函数解法
▪ 应力解法则以应力分量作为基本未知量,前面 已说过,应力分量必须满足平衡微分方程以及静力 边界条件,这是保证物体的平衡的充要条件,但这 仅仅是静力上可能的平衡,不是实际存在的平衡, 这组应力分量也不一定是真正的应力,而真正的应 力不仅要满足平衡微分方程与静力边界条件,还要 求与这组应力分量相应的应变分量满足应变协调方 程,这样才能既满足了物体的平衡又满足了物体的 连续,由此可知,应变协调方程在应力解法中是十 分重要的。以应力表示应变的物理方程代入应变协 调方程式中,得到以应力表示的协调方程。
▪ 问题:平面应力问题的以应力 表示的应变协调方程 类似三
维问题重新推导,能否直接用 三维的结论简化而来?
2y 2x 2xy x2 y2 xy
2(xy)(1) F xx F yy
2
2 x2
2 y2
应变协调方程(一般情况)
2 z 2 y 2 yz
y 2
z2
yz
2 x z2
2 z x 2
2. 取二次多项式为应力函数
弹塑性力学-15 屈服理论

●应力空间
3 P(1, 2 , 3 )
以应力分量为坐标轴—空间坐标系
主应力空间:主应力分量为坐标轴
2 1
●应力路径 一点应力状态的变化:应力点 在应力空间的运动轨迹来描述
应力空间既非几何空间又非物理空间
15.1 屈服理论分析
3. 屈服条件的一般形式
材料屈服与否取决于其所受 的应力状态和材料特性参数
S
等倾线
L P
2
一点的应力矢量 OP 1e1 2e2 3e3
15.1 屈服理论分析
2. 屈服条件的一般形式
3 QL
OP 1e1 2e2 3e3
P
n
1 3
e1
1 3
e2
1 3 e3
平面 o S
2
1
OQ OP n
1 3
(1
2
3
)
15.1 屈服理论分析
3. 屈服条件的一般形式
3. 屈服条件的一般形式
由于
f (1, 2 , 3, k) 0
I1 ii x y z 1 2 3 3 m
I2
x y
y z
z x
2 xy
2 yz
2 zx
1 2 2 3 31
I3
x
y
z
2 xy
yz
zx
x
2 yz
y
2 zx
z
2 xy
1 2 3
15.1 屈服理论分析
怎样建立屈服理论?
●根据屈服现象与机制,提出理论假设; ●基于理论假设建构屈服模型,即给出包含 屈服参数的理论公式; ●根据简单条件下的屈服试验结果,确定其 中的屈服参数; ●通过复杂应力状态下的屈服试验结果,对 理论进行检验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
弹性力学基本方程平衡微分方程:0⋅+=σ∇f指标符号写为,0ji j i f σ+=在直角坐标系中分量形式311121112332122221231323333123000f x x x f x x x f x x x σσσσσσσσσ⎧∂∂∂+++=⎪∂∂∂⎪⎪∂∂∂+++=⎨∂∂∂⎪⎪∂∂∂+++=⎪∂∂∂⎩在柱坐标系中分量形式1012010r r r rz r r zr z zr z rzz f r r z rf r r z r f r r z r θθθθθθθθτσσστθτσττθττστθ∂-∂∂⎧++++=⎪∂∂∂⎪∂∂∂⎪++++=⎨∂∂∂⎪∂∂∂⎪++++=⎪∂∂∂⎩在球坐标系中分量形式211cot 0sin 113cot 0sin 1132cot 0sin r r r r r r r r r r f r r r r r f rr r r r f r r r r r ϕθϕθθθϕθϕθθθθϕϕθϕϕϕθϕτσσσττσθθθϕτσστστθθθϕττσττθθθϕ∂--⎧∂∂+++++=⎪∂∂∂⎪⎪∂-∂∂⎪+++++=⎨∂∂∂⎪⎪∂∂∂+++++=⎪∂∂∂⎪⎩几何方程:1()2=+ε∇∇u u指标符号写为,,1()2ij i j j i u u ε=+在直角坐标系中分量形式1211221112113222223322333313331133131()21()21()2u u u x x x u u u x x x u u u x x x εεεεεεεεε⎧⎧∂∂∂==+=⎪⎪∂∂∂⎪⎪⎪⎪∂∂∂===+⎨⎨∂∂∂⎪⎪⎪⎪∂∂∂===+⎪⎪∂∂∂⎩⎩在柱坐标系中分量形式111r r z z zr u u v v r r r r v u v w r r z r w w u z r z θθθεγθεγθθεγ∂∂∂⎧⎧==+-⎪⎪∂∂∂⎪⎪∂∂∂⎪⎪=+=+⎨⎨∂∂∂⎪⎪∂∂∂⎪⎪==+⎪⎪∂∂∂⎩⎩在球坐标系中分量形式1111sin 11sin sin r rr r r r r r u u u u r r r r u u u u ctg u r r r r r u u ctg u u u u r r r r r r θθθϕθθθθϕϕϕϕϕϕθϕγεθθεγθθϕθθεγθϕθϕ⎧⎧∂∂∂=+-=⎪⎪∂∂∂⎪⎪⎪∂∂∂⎪=+=+-⎨⎨∂∂∂⎪⎪∂⎪⎪∂∂=++=+-⎪⎪∂∂∂⎩⎩应变协调方程:0⨯⨯=ε∇∇指标符号写为,0mjk nil ij kl e e ε=在直角坐标系中常用形式222112212222112222332322223223222331311221313223311112231123231232212312231233120001()21()21x x x x x x x x x x x x x x x x x x x x x x x x x x εεγεγεεγεγγεγγγεγε∂∂∂+-=∂∂∂∂∂∂∂+-=∂∂∂∂∂∂∂+-=∂∂∂∂∂∂∂∂∂=-++∂∂∂∂∂∂∂∂∂∂∂=-++∂∂∂∂∂∂∂=∂∂2331123312()2x x x x γγγ⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪∂∂∂∂-++⎪∂∂∂∂⎩本构方程::=σεC指标符号写为ij ijkl klC σε=对各向同性弹性体的线弹性本构关系的指标符号写为2ij ij kk ijG σελεδ=+在直角坐标系中分量形式222x x yy z z xy xy yz yz zx zxG G G G G G σελθσελθσελθτγτγτγ=+⎧⎪=+⎪⎪=+⎪⎨=⎪⎪=⎪=⎪⎩边界条件:力边界条件指标形式写为 j i ijp νσ=在指标坐标系分量形式x yx zx xy y zy xz yz z X l m n Y l m n Z l m n στττστττσ⎧=++⎪⎪=++⎨⎪=++⎪⎩位移边界条件指标形式写为 i iu u =在直角坐标系分量形式112233u u u u u u ⎧=⎪⎪=⎨⎪=⎪⎩位移解法:L-N 方程及力边界条件指标形式,,,,,()0[()]i jj j ji i i j j i k k ij j iGu G u f G u u u X λλδν+++=++=在直角坐标系中分量形式212223()0()0()0(2)()()()(2)()()()(2)G u G f x G v G f y G w G f z u v u w uG l G m G n X x x y x z u v v w vG l G m G n Yy xy y z u w v w wG l G m G n Zz xz y z θλθλθλλθλθλθ⎧∂∇+++=⎪∂⎪∂⎪∇+++=⎨∂⎪⎪∂∇+++=⎪∂⎩⎧∂∂∂∂∂+++++=⎪∂∂∂∂∂⎪⎪∂∂∂∂∂+++++=⎨∂∂∂∂∂⎪⎪∂∂∂∂∂+++++=∂∂∂∂∂⎩⎪应力解法:B-M 方程指标形式2,,,,1()11ij ij i j j i ij k kf f f νσδνν∇+Θ=-+-+-平面问题本构方程平面应变平面应力平面应力(极坐标系)αβαβαβδλεεσkk G +=2, 平面应力→平面应变:21υ-→E E 、υυυ-→1xyxyx y y y x x G G G γτευυευυσευυευυσ=-+--=-+--=)1(21)1(2)1(21)1(2 xyxyx y y y x x G G Gγτυεευσυεευσ=+-=+-=)(12)(12 θθθθθγτυεευσυεευσr r r r r G G G=+-=+-=)(12)(12 0)()(==+=+=zx zx y x y x z ττεελσσυσ===zx zx z ττσ0=z σ 0==θττz zrαβαβαβδσυσυεkk EE -+=1 xyxy xy x y y y x x GE E τεγσυυσυεσυυσυε12)1(1)1(122==---=---= xyxy xy x y y y x x GEEτεγυσσευσσε12)(1)(1==-=-=θθθθθτγυσσευσσεr r r r r GE E1)(1)(1=-=-====zy zx z γγε)(==+-=zy zx y x z Eγγσσυε)(θσσυε+-=r z E0==θγγz z r协调方程:y x yx xy x y ∂∂∂=∂∂+∂∂γεε22222,0112112222222=∂∂-∂∂-∂∂+∂∂∂-∂∂+∂∂θγεεθγθεεθθθθr r r r r r r r r r r r r))(1()(,,2y y x x y x f f ++-=+∇νσσ,如x x V f ,-=,y y V f ,-=,引入Airy 应力函数:V yy x +=,φσ V xx y +=,φσ,xy xy,φτ-=→V 222)1(∇--=∇∇νφ;22222yx ∂∂+∂∂=∇,4422444222yy x x ∂∂+∂∂∂+∂∂=∇∇极坐标系:02101=++∂∂+∂∂=+-+∂∂+∂∂θθθθθθτθστσσθτσf rr r f r r r r r r r r rrv r v u r ru v r r u r r rr r θθθθθθγθεε-∂∂+∂∂=+∂∂=∂∂=11 ,⎪⎭⎫ ⎝⎛∂∂∂∂-=∂∂=∂∂+∂∂=θφτφσθφφσθθr r rr r r r r 1 ,1122222V222)1(∇--=∇∇νφ,22222211θ∂∂+∂∂+∂∂=∇r r r r,⎪⎪⎭⎫⎝⎛-⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛-=⎪⎪⎭⎫ ⎝⎛θθθθσττσθθθθσττσθθθcos sin sin cos cos sin sin cos r r ry xyxy x塑性力学基本公式:一维随动强化模型材料后继屈服限与先期拉(压)塑性应变的关系**p s ps h d h d σσεσσε+-=+=-+⎰⎰一维等向强化模型材料后继屈服限与先期拉(压)塑性应变的关系***||p s h d σσεσσ+-+=+=-⎰应力偏量的第二不变量22222222112222333311122331221'21'[()()()6()]6'3'ij ij ijij J S S J J S J σσσσσστττσσ==-+-+-+++∂=∂=应变偏量的第二不变量2222222211222233331112233121'213'[()()()()]624'3ij ijI e e I I εεεεεεγγγε==-+-+-+++=金属材料的屈服条件:Mises 屈服条件2()03'ij s J σσσσ-==其中Tresca 屈服条件max ()02sij στσ-=三维随动强化模型后继屈服条件(,)()0p p pij ij ij s ij ij K c d σσσεσεεΦ=--==⎰其中三维等向强化模型后继屈服条件41(,)()()0032p p p pij ij s ij ij K h d d d d σσσσεεεεΦ=-+==⋅≥⎰其中全量形式的应力-应变关系2()1()33ij kk ij ij kk ij K σεσεδεεδε=+-全量形式的应变-应力方程13()1()923ij kk ij ij kk ij K εσεσδσσδσ=+-σε-关系为**3,3(),33',122(1)'3s s ss G GE G G E EE G E E E σεεσσσσεενν⎧⋅<⎪⎪=⎨⎪+->⎪⎩==-+-增量形式的应变-应力方程(指标符号)()011ij ij kk ij ij d d d d S E ευσυσδλ⎡⎤=+-+⎣⎦增量形式的应力-应变方程(矩阵形式)0000T e e e ep T e D D d D d D d D ασσασεεσαασ⎛⎫=-= ⎪⎝⎭线性等向强化材料加载时的增量本构关系(指标符号)()()0020191114ij ij kk ij kl kl ij d d d S d S E h ευσυσδσσ⎡⎤=+-+⎣⎦线性等向强化材料加载时的增量本构关系(矩阵形式)()()000209114T e ep d F d d F d hεσασσασσσσ=+=。