四旋翼无人机的姿态解算及实现
四旋翼无人机控制系统设计与实现
四旋翼无人机控制系统设计与实现四旋翼无人机是一种结构简单、操作灵活的垂直起降无人机。
首先分析了四旋翼无人机的基本运动原理,然后以APM飞控计算机为核心,结合GPS定位芯片、陀螺仪、加速度计、航向计、无线数据电台等装置,进行了微型四旋翼无人机的系统集成。
分析了包括位置回路和姿态回路的双闭环控制结构的四旋翼无人机的控制逻辑与控制规律。
在进行传感器标定、参数整定等工作的基础上,对无人机进行了综合调试。
最终实现了无人机的稳定可靠飞行,具有良好的姿态控制、轨迹控制能力,各项性能指标符合设计要求。
标签:四旋翼无人机;PID控制;飞行控制;姿态控制;轨迹控制Abstract:The four-rotor unmanned aerial vehicle(UA V)is a kind of vertical take-off and landing UA V with simple structure and flexible operation. In this paper,the basic principle of motion of the four-rotor UA V is analyzed,then the APM flight control computer is used as the core,and the GPS positioning chip,gyroscope,accelerometer,heading meter,wireless data radio and other devices are combined. The system integration of micro quad-rotor unmanned aerial vehicle (UA V)is carried out. The control logic and control law of the four-rotor unmanned aerial vehicle (UA V)with double closed-loop control structure including position loop and attitude loop are analyzed. On the basis of sensor calibration and parameter tuning,the UA V is comprehensively debugged. Finally,the UA V can fly stably and reliably,and it has good attitude control and trajectory control ability,and all the performance indexes meet the requirements of design.Keywords:four rotor UA V;PID control;flight control;attitude control;trajectory control1 概述四旋翼無人机是一种非共轴、多旋翼式无人机,改变四个旋翼产生的升力大小就可以实现姿态稳定及飞行控制,其结构简单,体积较小,且飞行平稳、隐蔽性好,可用于救援搜索、侦查监控、探查航拍等任务,具有重要的研究价值和广阔的应用前景[1]。
两种四旋翼无人机姿态解算算法仿真分析

两种四旋翼无人机姿态解算算法仿真分析作者:李俊杰张晓龙王聪张峻豪来源:《软件》2020年第10期摘要:近年来随着微电子技术和控制技术的发展,四旋翼无人机也得到了快速的发展,为了精确的得到四旋翼无人机的姿态角,从而提高无人机控制系統的控制精度,由传感器测到的信息需要进行解算处理,常用的解算算法有互补滤波算法和卡尔曼滤波算法。
本文对两种常用的姿态解算算法原理进行推导并进行了仿真实验,实验结果表明两种解算算法均能优化所测得的信息,互补滤波算法可以有效融合陀螺仪和加速度计的特性从而提高滤波性能,在卡尔曼滤波算法中可以自由配置Q和R的值来调整观测信息和预测信息的权重。
关键词:四旋翼无人机;姿态解算;互补滤波;卡尔曼滤波中图分类号: TP391 文献标识码: A DOI:10.3969/j.issn.1003-6970.2020.10.063本文著录格式:李俊杰,张晓龙,王聪,等. 两种四旋翼无人机姿态解算算法仿真分析[J]. 软件,2020,41(10):250252【Abstract】: In recent years, with the development of microelectronics and control technology, quadrotor UAV has also been rapid development. In order to accurately obtain theattitude angle of quadrotor UAV and improve the control accuracy of UAV control system, the information measured by sensors needs to be solved. The commonly used algorithms are complementary filtering algorithm and Kalman filtering algorithm. In this paper, the principle of two commonly used attitude calculation algorithms is derived and simulated. The experimental results show that the two algorithms can optimize the measured information, and the complementary filtering algorithm can effectively integrate the characteristics of gyroscope and accelerometer, so as to improve the filtering performance. In Kalman filter algorithm, the values of Q and R can be freely configured to adjust the observation information and prediction information Weight.【Key words】: Quadrotor UAV; Attitude solution; Complementary filtering; Kalman filter0 引言无人机是一种可以回收利用的可执行各种飞行任务的飞行器。
四轴飞行器姿态控制算法

四轴飞行器姿态控制算法四轴飞行器姿态控制是指通过调整四个电机的转速,使得飞行器能够保持所需的姿态,例如平稳飞行、转弯、盘旋等。
姿态控制算法主要包括传感器采集、姿态估计和控制指令生成等几个部分。
以下将详细介绍四轴飞行器姿态控制的算法原理。
1.传感器采集:四轴飞行器通常会配备三个主要的传感器:加速度计、陀螺仪和磁力计。
加速度计用于测量飞行器的重力加速度,陀螺仪用于测量飞行器的角速度,磁力计用于测量地磁场强度。
这些传感器的数据将用于后续的姿态估计和控制。
2.姿态估计:姿态估计是根据传感器提供的数据计算出飞行器的当前姿态角。
一种常用的姿态估计方法是互补滤波器。
互补滤波器将加速度计和陀螺仪的数据进行融合,通过加速度计估计出的姿态角和陀螺仪估计出的姿态角进行加权平均,从而得到更准确的姿态估计。
3.控制指令生成:姿态控制器的目标是生成适当的转速指令,使得飞行器能够达到所需的姿态。
在四轴飞行器中,姿态控制通常分为俯仰控制、滚转控制和偏航控制三个方向。
俯仰控制用于调整飞行器的前后倾斜角度,滚转控制用于调整飞行器的左右倾斜角度,偏航控制用于调整飞行器的旋转角度。
在控制指令生成中,通常会采用PID控制器。
PID控制器根据目标姿态角和当前姿态角的误差,计算出相应的控制指令。
PID控制器包括三个参数:比例项、积分项和微分项。
比例项用于快速响应误差,积分项用于消除稳态误差,微分项用于抑制系统的振荡。
通过将三个方向的控制指令进行线性叠加,得到最终的转速指令。
转速指令将被发送到四个电机,控制它们的转速,从而实现飞行器的姿态调整。
值得注意的是,四轴飞行器还需要考虑到动力学和非线性因素。
动力学因素包括电机的动态响应和旋转惯量的影响,通常会使用动态模型进行补偿。
非线性因素包括旋翼的非线性动力学和空气动力学特性的影响,通常会采用非线性控制器进行补偿。
综上所述,四轴飞行器姿态控制算法主要包括传感器采集、姿态估计和控制指令生成等几个部分。
四旋翼无人机控制原理

四旋翼无人机控制原理四旋翼无人机(Quadcopter)是一种由四个电动马达驱动的多旋翼飞行器,它通过改变电动马达的转速来控制飞行姿态和飞行方向。
在本文中,我们将探讨四旋翼无人机的控制原理,包括姿态稳定控制、飞行控制和导航控制等方面的内容。
首先,四旋翼无人机的姿态稳定控制是其飞行控制的基础。
姿态稳定控制是通过调整四个电动马达的转速,使得无人机能够保持平衡并保持所需的飞行姿态。
这一过程涉及到飞行控制器(Flight Controller)的运算和反馈控制,通过加速度计、陀螺仪和磁力计等传感器获取飞行器的姿态信息,并根据预设的飞行控制算法来调整电动马达的转速,从而实现姿态的稳定控制。
其次,飞行控制是四旋翼无人机实现飞行动作的关键。
飞行控制包括起飞、降落、悬停、前进、后退、转向等动作,通过改变四个电动马达的转速和倾斜角度,飞行控制器能够实现对无人机的飞行状态进行精确控制。
在飞行控制过程中,飞行控制器需要根据无人机的当前状态和飞行任务的要求,实时调整电动马达的输出,以实现平稳、灵活的飞行动作。
最后,导航控制是四旋翼无人机实现自主飞行和定位的重要环节。
导航控制包括位置定位、航向控制、高度控制等功能,通过全球定位系统(GPS)、气压计、光流传感器等设备获取飞行环境的信息,并通过飞行控制器进行数据处理和控制指令下发,实现无人机在空中的定位和导航。
导航控制的精准性和稳定性对于实现无人机的自主飞行和执行特定任务至关重要。
综上所述,四旋翼无人机的控制原理涉及姿态稳定控制、飞行控制和导航控制等多个方面,通过飞行控制器和传感器等设备的协同作用,实现对无人机飞行状态的实时监测和精确控制。
这些控制原理的应用,使得四旋翼无人机能够在各种环境条件下实现稳定、灵活的飞行,并具备执行特定任务的能力,如航拍、搜救、巡航等。
四旋翼无人机的控制原理不仅对于飞行器设计和制造具有重要意义,也对于无人机的应用和发展具有深远影响。
四旋翼飞行器的姿态解算小知识点
1、惯性测量单元IMU(InertialMeasurement Unit)姿态航向参考系统AHRS(Attitude and Heading Reference System)地磁角速度重力MARG(Magnetic, Angular Rate, and Gravity)微机电系统MEMS(Micro Electrical Mechanical Systems)自由度维数DOF(Dimension Of Freedom)无人驾驶飞行器UAV(Unmanned Aerial Vehicle)扩展卡尔曼滤波EKF(Extended Kalman Filter)无损卡尔曼滤波UKF(Unscented Kalman Filter)惯性导航系统INS(Inertial Navigation System)全球导航卫星系统GNSS(Global Navigation Satellite System)天文导航系统CNS(Celestial Navigation System)可垂直起降VTOL(Vertical Take-off and Landing)2、常见的导航系统:惯性导航、天文导航、卫星导航、路标导航、无线电导航、推算导航、组合导航。
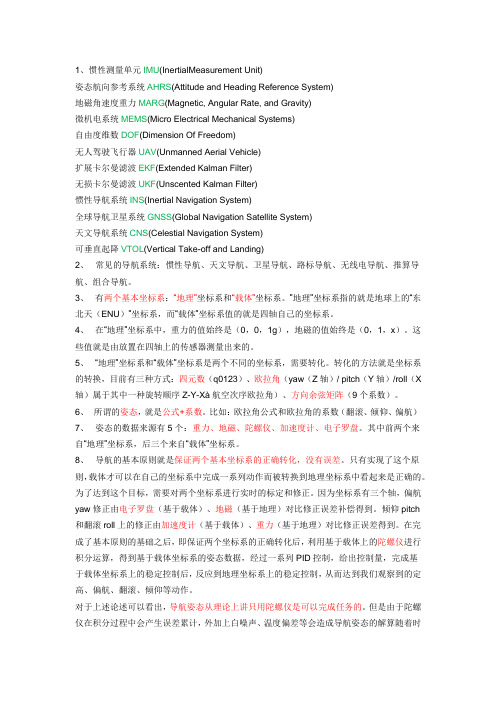
3、有两个基本坐标系:“地理”坐标系和“载体”坐标系。
”地理”坐标系指的就是地球上的“东北天(ENU)”坐标系,而“载体”坐标系值的就是四轴自己的坐标系。
4、在“地理”坐标系中,重力的值始终是(0,0,1g),地磁的值始终是(0,1,x)。
这些值就是由放置在四轴上的传感器测量出来的。
5、“地理”坐标系和“载体”坐标系是两个不同的坐标系,需要转化。
转化的方法就是坐标系的转换,目前有三种方式:四元数(q0123)、欧拉角(yaw(Z轴)/ pitch(Y轴)/roll(X 轴)属于其中一种旋转顺序Z-Y-Xà航空次序欧拉角)、方向余弦矩阵(9个系数)。
6、所谓的姿态,就是公式+系数。
四旋翼飞行器的姿态解算及控制

科技资讯2015 NO.35SCIENCE & TECHNOLOGY INFORMATION信 息 技 术33科技资讯 SCIENCE & TECHNOLOGY INFORMATION 近年来,随着现代控制理论以及传感器技术的迅速发展,尤其是微电子技术的日益成熟,一种特殊的无人机——四旋翼飞行器吸引了越来越多人的兴趣,并逐渐成为各高校及一些科研单位的研究热点,由于其具备体积小,可垂直起降,机动性极高,可在狭窄,恶劣的环境下起飞,前行并悬停于任何方位[1]。
故其广泛地应用于航拍,灾后搜救及战地搜索等军用及民用领域。
该文介绍了四旋翼飞行器的基本原理,并简单讨论了姿态解算过程中的数据融合及互补滤波,以及姿态控制中的串级PID控制。
1 四旋翼飞行器基本工作原理四旋翼飞行器是一种固定连接在一个十字叉上的由四个电机驱动的飞行器,相比较于其他形式的飞行器,四旋翼飞行器的动力由电机直接驱动,飞行器的前行,横滚,俯仰等姿态可完全由电机转速差完成,无需其他传动装置,故机械结构相对简单,便于小型化,微型化。
常见的四旋翼飞行器按照结构布局来分通常有“十”型和“X”型两种布局(如图1),通常来说,“X”型布局有着更为优秀的稳定①作者简介:戴青燃(1987—),男,汉,安徽合肥人,本科,助理工程师,主要研究方向:电子产品控制技术。
DOI:10.16661/ki.1672-3791.2015.35.033四旋翼飞行器的姿态解算及控制①戴青燃 李航宇(中国电子科技集团公司光电研究院 天津 300000)摘 要:四旋翼飞行器是一种新型的无人机,有着结构简单,灵活的优点,广泛应用于灾后搜救,目标跟踪及安全巡检,近年来,民用及军用市场的广泛需求更促进了四旋翼飞行器的发展,由于四旋翼飞行器的飞行姿态具有强耦合及不稳定的特性,而姿态控制又是飞行器控制系统的核心,该文简单介绍了四旋翼飞行器的姿态解算及控制方法,给出了互补滤波器融合系数的方法,在PID控制算法中使用串级PID控制,经过实验证明,所设计控制系统性能可靠,满足飞行器姿态控制的要求。
(转)一种常见的四轴飞行器姿态解算方法分析
(转)一种常见的四轴飞行器姿态解算方法分析全国各地已经陆续开放低空管制,北京也将在2015年全面开放低空领域,这对低空飞行器将是一个十分重大的好消息!低空飞行器也将迎来一个新的发展春天。
实际上,近年四轴飞行器发展相当迅速,国内的航拍水平越来越高,顺丰及亚马逊已在尝试将无人机用于快递行业。
越来越多的人开始关注并研究四轴飞行器。
本文将分析一种常见的四轴飞行器姿态解算方法,Mahony的互补滤波法。
此法简单有效,希望能给学习四轴飞行器的朋友们带来帮助。
关于姿态解算和滤波的理论知识,推荐秦永元的两本书,一是《惯性导航》,目前已出到第二版了;二是《卡尔曼滤波与组合导航原理》。
程序中的理论基础,可在书中寻找。
下面开始进入正题:先定义Kp,Ki,以及halfT 。
Kp,Ki,控制加速度计修正陀螺仪积分姿态的速度halfT ,姿态解算时间的一半。
此处解算姿态速度为500HZ,因此halfT 为0.001#define Kp 2.0f#define Ki 0.002f#define halfT 0.001f初始化四元数float q0 = 1, q1 = 0, q2 = 0, q3 = 0;定义姿态解算误差的积分float exInt = 0, eyInt = 0, ezInt = 0;以下为姿态解算函数。
参数gx,gy,gz分别对应三个轴的角速度,单位是弧度/秒;参数ax,ay,az分别对应三个轴的加速度原始数据由于加速度的噪声较大,此处应采用滤波后的数据void IMUupdate(float gx, float gy, float gz, float ax, float ay, float az){float norm;float vx, vy, vz;float ex, ey, ez;将加速度的原始数据,归一化,得到单位加速度norm = sqrt(ax*ax + ay*ay + az*az);ax = ax / norm;ay = ay / norm;az = az / norm;把四元数换算成“方向余弦矩阵”中的第三列的三个元素。
四轴飞行器姿态控制算法
姿态解算姿态解算(attitude algorithm),是指把陀螺仪,加速度计, 罗盘等的数据融合在一起,得出飞行器的空中姿态,飞行器从陀螺仪器的三轴角速度通过四元数法得到俯仰,航偏,滚转角,这是快速解算,结合三轴地磁和三周加速度得到漂移补偿和深度解算。
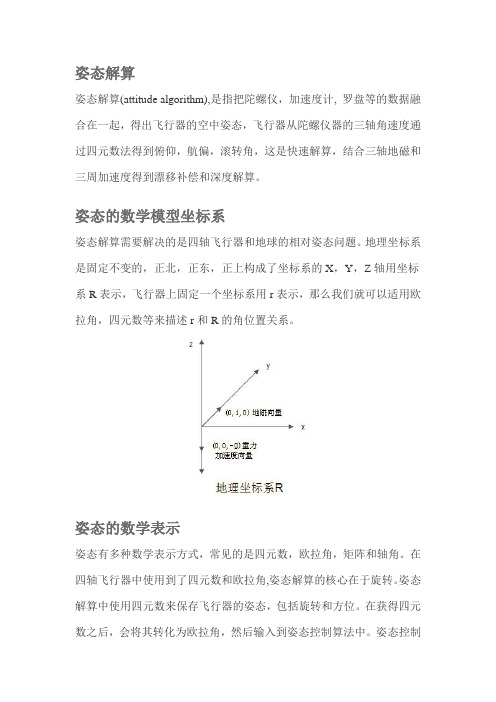
姿态的数学模型坐标系姿态解算需要解决的是四轴飞行器和地球的相对姿态问题。
地理坐标系是固定不变的,正北,正东,正上构成了坐标系的X,Y,Z轴用坐标系R表示,飞行器上固定一个坐标系用r表示,那么我们就可以适用欧拉角,四元数等来描述r和R的角位置关系。
姿态的数学表示姿态有多种数学表示方式,常见的是四元数,欧拉角,矩阵和轴角。
在四轴飞行器中使用到了四元数和欧拉角,姿态解算的核心在于旋转。
姿态解算中使用四元数来保存飞行器的姿态,包括旋转和方位。
在获得四元数之后,会将其转化为欧拉角,然后输入到姿态控制算法中。
姿态控制算法的输入参数必须要是欧拉角。
AD值是指MPU6050的陀螺仪和加速度值,3个维度的陀螺仪值和3个维度的加速度值,每个值为16位精度。
AD值必须先转化为四元数,然后通过四元数转化为欧拉角。
在四轴上控制流程如下图:下面是用四元数表示飞行姿态的数学公式,从MPU6050中采集的数据经过下面的公式计算就可以转换成欧拉角,传给姿态PID控制器中进行姿态控制.PID控制算法先简单说明下四轴飞行器是如何飞行的,四轴飞行器的螺旋桨与空气发生相对运动,产生了向上的升力,当升力大于四轴的重力时四轴就可以起飞了。
四轴飞行器飞行过程中如何保持水平:我们先假设一种理想状况:四个电机的转速是完全相同的是不是我们控制四轴飞行器的四个电机保持同样的转速,当转速超过一个临界点时(升力刚好抵消重力)四轴就可以平稳的飞起来了呢?答案是否定的,由于四个电机转向相同,四轴会发生旋转。
我们控制四轴电机1和电机3同向,电机2电机4反向,刚好抵消反扭矩,巧妙的实现了平衡, 但是实际上由于电机和螺旋浆本身的差异,造成我们无法做到四个电机产生相同的升力,这样飞行器起飞之后就会失去平衡。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
理论与算法
四旋翼无人机的姿态解算及实现
杨勇,张广有,李加杰 (河南科技大学机电工程学院,河南洛阳,471000)
摘要 :本文用现代控制理论中的状态空间模型去描述四旋翼无人机的输入、输入模型,给 Matlab 下的 Simulink 模型提 供了参照。紧接着介绍了四元数和姿态解算,给出了四元数怎么进行姿态解算,还给出了硬件的组机方案,最后我们在地 面站软件上完成基本的参数调试后,绕着操场进行了试飞,实现了良好的姿态控制、轨迹控制能力,达到了预期的要求。 关键字 :四旋翼无人机 ;飞行原理 ;状态空间 ;四元数及姿态解算
57
理论与算法
2019.09
经过计算后得到的四旋翼无人机的状态方程模型如下 :
.
x
.
x
=
.
x
.. x
.
φ
=
0 0
g
−
k m
(u1
+
) u2 + u3 + u4 −scψψssϕϕ++csψψssθθccϕϕ
0 引言
无 人 机 就 是 无 人 驾 驶 的 飞 机,是 一 种 靠 后 台 计 算 机远程监控和遥控且可以根据自身装配的飞行控制 系 统 进 行 遥 控 飞 行 或 者 自 主 飞 行 的 自 动 化 设 备。简 称 UnmannedAerialVehicle。即 UVA。微小型无人机为“Drone”。 而四旋翼无人机是一种非共轴、多旋翼式无人机,改变四个 旋翼产生的升力大小就可以实现姿态稳定及飞行控制,其结 构简单,体积较小,且飞行平稳,隐蔽性好、可用于救援搜索、 侦察监测。探查航拍任务,具有重要研究价值和广阔的应用 前景 [1]。同时,四旋翼无人机的可持续开发价值非常大。例 如,在视觉方面,可以利用四旋翼机载图像设备作为实验平 台,进行视觉定位与视觉导航系统的研究。[2]
ω yω z
Lk (u1 − u3 )
Iy
−
Iz
− Iy
Ix
ωzωx
b ( −u1
+
u2
−
PWM 波的占空比成正比,可将控制量 ui 的平方根经线性转换 为占空比送至电调。
图 1 模型参数
系统输入为 :
u
=
uu12 u3 u4
=
ωω1222 ωω
系统状态变量 :位移 x = x y zT ,速度 x = x y zT ,
The basic principle, attitude calculation and realization of quadrotor UAV
Yang Yong,Zhang Guangyou,Li Jiajie (School of Mechatronics Engineering,Henan University of Scienceand Technology, Luoyang Henan,471000)
在自动控制领域,作为一个具有四个控制量输入,六个 自由度输出的欠驱动系统,具有多变量、非线性、强耦合的 特性。同时,由于气动参数难以确定,该系统模型具有不确定 性,因此,它的建模和控制问题反映了当前四旋翼飞行器的 建模和控制问题中的各种难点 [3]。
1 状态空间模型
由四旋翼无人机的基本物理模型,接下来我们尝试做了 四旋翼无人机的状态空间模型。将旋翼转速的平方 ωi2 作为 一个整体 ui ,当作系统输入。四旋翼无人机基本上都是使用 无刷直流电机,搭配电子调速器 (BEC),则输出的电机转速与
Abstract: Based on the physical model, the state space in modern control theory is used. The model describes the input and input models of the quadrotor UAV, and provides a reference for the Simulink model under Matlab. Then introduced the quaternion and attitude solution, gave the quaternion how to solve the attitude, and also gave the hardware group plan, and finally we completed the basic parameter debugging on the ground station software, around The test flight was carried out in the playground, and the good attitude control and trajectory control ability were achieved, and the expected requirements were met. Keywords: quadrotor UAV; flight principle; state space; quaternion and attitude solution
姿态角 ϕ = φ θ ψ T ,三轴角速度 ω = ωx ωy ωz T 。
状态变量为 :
x1 x
x
=
x2 x3 x4
=
x
ϕ
ω
(2)
项目资助 :河南科技大学 2018 年度大学生研究训练计划(SRTP)项目 (2018014)。
cθ cϕ
1 0
0 cϕ
− cθ
sθ sϕ
−1
ω
0 −sϕ cθ cϕ
−
d
..
xx
m
( 3)
ω.
Lk (−u2 + u4 )
Ix
I
y
− Ix
Iz