杭州电子科技大学运动控制系统实验报告

运动控制系统
实验报告
实验名称:实验一双闭环直流调速系统仿真实验实验二矢量控制变频调速系统仿真
实验三双闭环可逆直流脉宽调速系统
实验四数字开环SPWM控制系统
班级:
学号:
姓名:
指导老师:
实验一:双闭环晶闸管不可逆直流调速系统实验
一. 实验目的
(1)了解闭环不可逆直流调速系统的原理、组成及各主要单元部件的原理。 (2)掌握双闭环不可逆直流调速系统的调试步骤、方法及参数的整定。 (3)研究调节器参数对系统动态性能的影响。
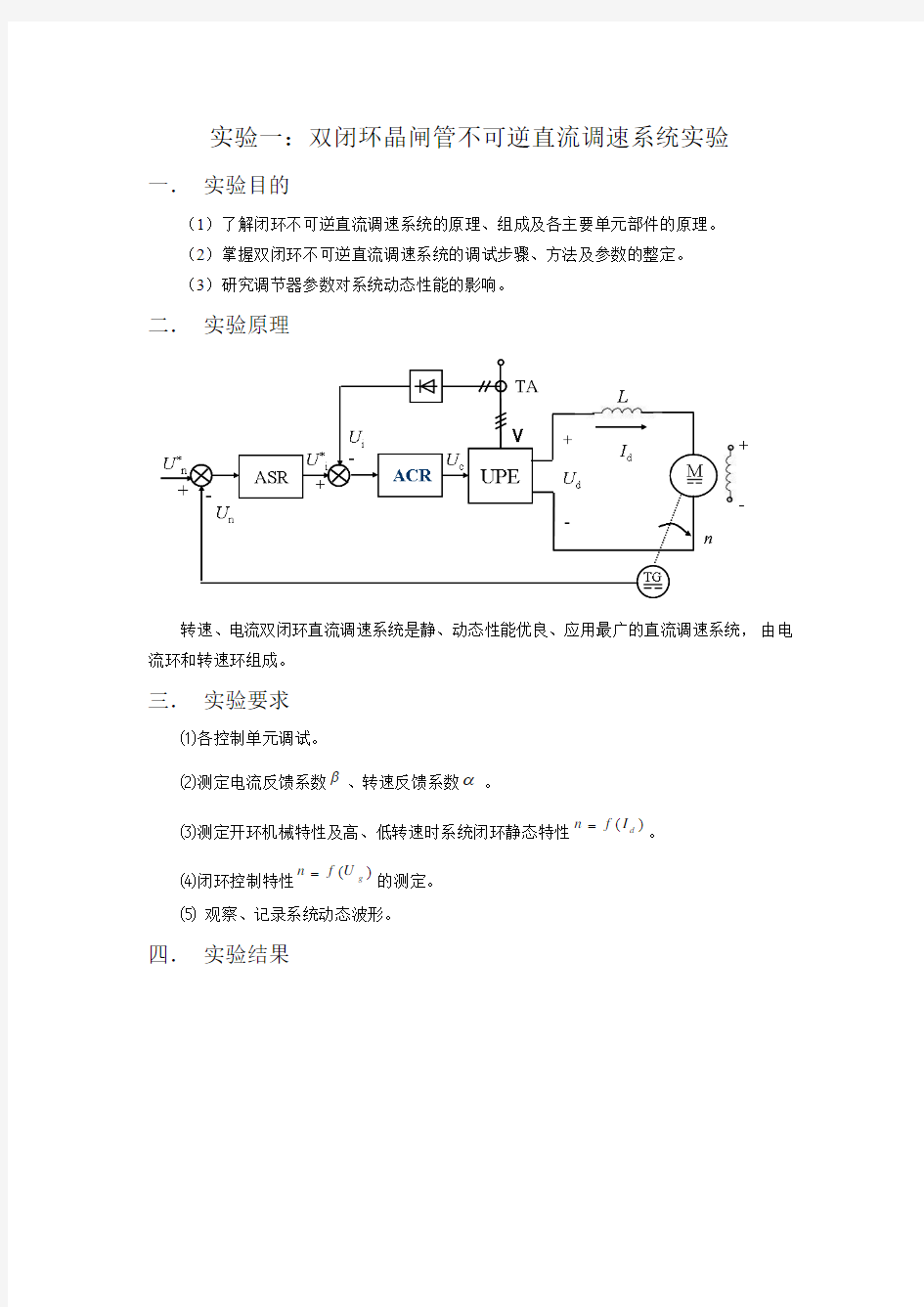
二. 实验原理
转速、电流双闭环直流调速系统是静、动态性能优良、应用最广的直流调速系统,由电
流环和转速环组成。
三. 实验要求
⑴各控制单元调试。
⑵测定电流反馈系数β、转速反馈系数α。
⑶测定开环机械特性及高、低转速时系统闭环静态特性()
d n f I =。
⑷闭环控制特性
()
g n f U =的测定。
⑸ 观察、记录系统动态波形。
四. 实验结果
图高、低转速时系统闭环静态特性仿真结果
实验二:三相异步电动机矢量控制变频调速系统实验
一.实验目的
⑴了解并熟悉异步电动机矢量控制变频调速系统的原理及组成。
⑵了解异步电动机矢量控制变频调速系统的调试步骤及方法。
⑶了解异步电动机矢量控制变频调速系统的静态与动态特性。二.实验原理
图三相异步电动机矢量控制变频调速系统原理三.实现要求
⑴各控制单元调试。
⑵测定双闭环交流调压调速系统的静态特性。
⑶测定双闭环交流调压调速系统的动态特性。
四.实验结果
图双闭环交流调压调速系统结构图
图双闭环交流调压调速系统仿真结果
实验三:双闭环可逆直流脉宽调速系统一.实验目的
1.掌握双闭环可逆直流脉宽调速系统的组成、原理及各主要单元部件的工作原理。
2.熟悉直流PWM专用集成电路SG3525的组成、功能与工作原理。
3.熟悉H型PWM变换器的各种控制方式的原理与特点。
4.掌握双闭环可逆直流脉宽调速系统的调试步骤、方法及参数的整定。
二.实验内容
1.闭环系统调试
2.系统静态特性测定
三.实验结果
(1)机械特性n=f(Id)的测定
系统正转时:
n(r/min) 1045 1043 1044 1041 1040 1040 I(A) 0 0.327 0.400 系统反转时:
n(r/min) -996 -996 -993 -992 -991 -990 I(A) 0.415
图n=f(Id)曲线
(2)闭环控制特性n=f(Ug)的测定
n(r/min) 317 611 922 1222 1523 Ug(V) 0 0.5 1.0 1.5 2.0
图闭环控制特性n=f(Ug)曲线
四.实验分析
1.从机械特性测定实验中可以发现,负载在一定范围内变化,直流电机的转速始终保
持恒定。
2.在额定转速之下调节给定Ug,输出的转速是线性的。
实验四:数字开环SPWM控制系统
一.实验目的
1.了解DSP开环SPWM控制三相异步电动机
二.实验结果
图转速436变化到845状态图
图转速1326变化到1282状态图
运动控制实验报告通用范本
内部编号:AN-QP-HT390 版本/ 修改状态:01 / 00 In Order T o Standardize The Management, Let All Personnel Enhance The Executive Power, Avoid Self- Development And Collective Work Planning Violation, According To The Fixed Mode To Form Daily Report To Hand In, Finally Realize The Effect Of Timely Update Progress, Quickly Grasp The Required Situation. 编辑:__________________ 审核:__________________ 单位:__________________ 运动控制实验报告通用范本
运动控制实验报告通用范本 使用指引:本报告文件可用于为规范管理,让所有人员增强自身的执行力,避免自身发展与集体的工作规划相违背,按固定模式形成日常报告进行上交最终实现及时更新进度,快速掌握所需了解情况的效果。资料下载后可以进行自定义修改,可按照所需进行删减和使用。 实验一晶闸管直流调速系统电流-转速调节器调试 一.实验目的 1.熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求。2.掌握直流调速系统主要单元部件的调试步骤和方法。 二.实验内容 1.调节器的调试 三.实验设备及仪器 1.教学实验台主控制屏。2.MEL—11组件3.MCL—18组件4.双踪示波器5.万用表
电子科技大学 汇编 实验报告
计算机专业类课程 实 验 报 告 课程名称:汇编语言程序设计 学院:计算机科学与工程 专业:计算机科学与技术 学生姓名:郭小明 学号:2011060100010 日期:2013年12月24日
电子科技大学 实验报告 实验一 学生姓名:郭小明学号:2011060100010 一、实验室名称:主楼A2-412 二、实验项目名称:汇编源程序的上机调试操作基础训练 三、实验原理: DEBUG 的基本调试命令;汇编数据传送和算术运算指令 MASM宏汇编开发环境使用调试方法 四、实验目的: 1. 掌握DEBUG 的基本命令及其功能 2. 学习数据传送和算术运算指令的用法 3.熟悉在PC机上编辑、汇编、连接、调试和运行汇编语言程序的过程五、实验内容: 编写程序计算以下表达式: Z=(5X+2Y-7)/2 设X、Y的值放在字节变量VARX、VARY中,结果存放在字节单元VARZ中。 1.编辑源程序,建立一个以后缀为.ASM的文件. 2.汇编源程序,检查程序有否错误,有错时回到编辑状态,修改程序中错误行。无错时继续第3步。 3.连接目标程序,产生可执行程序。
4.用DEBUG程序调试可执行程序,记录数据段的内容。 六、实验器材(设备、元器件): PC机,MASM软件平台。 七、实验数据及结果分析: 程序说明: 功能:本程序完成Z=(5X+2Y-7)/2这个等式的计算结果求取。其中X 与Y 是已知量,Z是待求量。 结构:首先定义数据段,两个DB变量VARX与VARY(已经初始化),以及结果存放在VARZ,初始化为?。然后定义堆栈段,然后书写代码段,代码段使用顺序程序设计本程序,重点使用MOV和IMUL以及XOR,IDIV完成程序设计。详细内容见程序注释。 程序清单:
电子科大电子技术实验报告
电子科技大学 电子技术实验报告 学生姓名:班级学号:考核成绩:实验地点:仿真指导教师:实验时间: 实验报告内容:1、实验名称、目的、原理及方案2、经过整理的实验数据、曲线3、对实验结果的分析、讨论以及得出的结论4、对指定问题的回答 实验报告要求:书写清楚、文字简洁、图表工整,并附原始记录,按时交任课老师评阅实验名称:负反馈放大电路的设计、测试与调试
一、实验目的 1、掌握负反馈电路的设计原理,各性能指标的测试原理。 2、加深理解负反馈对电路性能指标的影响。 3、掌握用正弦测试方法对负反馈放大器性能的测量。 二、实验原理 1、负反馈放大器 所谓的反馈放大器就是将放大器的输出信号送入一个称为反馈网络的附加电路后在放大器的输入端产生反馈信号,该反馈信号与放大器原来的输入信号共同控制放大器的输入,这样就构成了反馈放大器。单环的理想反馈模型如下图所示,它是由理想基本放大器和理想反馈网络再加一个求和环节构成。 反馈信号是放大器的输入减弱成为负反馈,反馈信号使放大器的输入增强成为正反馈。四种反馈类型分别为:电压取样电压求和负反馈,电压取样电流求和负反馈,电流取样电压求和负反馈,电流取样电流求和负反馈。 2、实验电路
实验电路如下图所示,可以判断其反馈类型累电压取样电压求和负反馈。 3.电压取样电压求和负反馈对放大器性能的影响 引入负反馈会使放大器的增益降低。负反馈虽然牺牲了放大器的放大倍数,但它改善了放大器的其他性能指标,对电压串联负反馈有以下指标的改善。 可以扩展闭环增益的通频带 放大电路中存在耦合电容和旁路电容以及有源器件内部的极间电容,使得放大器存在有效放大信号的上下限频率。负反馈能降低和提高,从而扩张通频带。 电压求和负反馈使输入电阻增大 当 v一定,电压求和负反馈使净输入电压减小,从而使输入电流 s
运动控制系统实验报告
运动控制系统实验报告 专业班级 学号 姓名 学院名称 运动控制仿真实验报告 一、实验内容与要求 1.单闭环转速负反馈 2.转速电流双闭环负反馈
3.晶闸管相控整流双闭环直流调速系统仿真模型搭建 具体要求:针对1 2 (1)仿真各环节参数 (2)仿真模型的建立 (3)仿真结果,分为空载还是负载,有无扰动 (4)仿真结果分析 二、Simulink 环境下的仿真 1.单闭环转速负反馈 1.1转速负反馈闭环调速系统仿真各环节参数 直流电动机:额定电压N U =220V ,额定电流dN I =55A ,额定N n =1000r/min ,电动机电动 势系数e C =0.192V ·min/r 。 假定晶闸管整流装置输出电流可逆,装置的放大系数s K =44,滞后时间常数 s T =0.00167s 。 电枢回路总电阻R=1.0Ω,电枢回路电磁时间常l T =0.00167s ,电力拖动统机电时间 常数m T =0.075s 。 转速反馈系数α=0.01V ·min/r 。 对应额定转速是的给定电压 n U =10V 。
1.2仿真模型的建立 图1-1单闭环转速负反馈直流调速系统的仿真模型 PI 调节器的值定为 =0.56, = 11.43。 图1-2单闭环转速负反馈直流调速系统加入扰动负载时的仿真模型 1.3仿真结果 p K 1
图1-3空载启动不加扰动转速和电流波形 图1-4空载启动加负载扰动转速和电流波形 1.4仿真结果分析 (1)空载启动无扰动:由空载启动不加扰动转速和电流波形可知,当 =0.56, = 11.43。系统转速有较大的超调量,但快速性较好的。空载启动电流的最大值有230A 左右,而额定电流 dN I =55A ,远远超过了电动机承受的最大电流。 (1)空载启动加负载扰动:由空载启动加负载扰动转速和电流波形可知,在空载启动1S 后加负载扰动,在1S 到1.5S 时间段,转速和电流有明显的下降,但系统马上进行了调节。 p K 1
电子科大TCPIP第三次实验报告材料
实用文档 电子科技大学实 验 报 告 名:学生姓号:学TCP/IP协议名课程称: 教指导师:2016 年 11 日期:月 26 日 OSPF实验项目名称:协议的多区域特性分:告报评教师签字:
实用文档 一、实验原理 OSPF 协议(RFC 2328)是一个基于链路状态路由选择的内部网关协议:路由器仅 在网络拓扑变化时使用洪泛法(flooding)将自己的链路状态更新信息扩散到整个自治系统中。为了增强 OSPF 协议的可伸缩能力(Scalability),OSPF 协议引入了区域的概念来有效并及时的处理路由选择。OSPF 区域是包含在 AS 中的一些网络、主机和路由器的集合,自治系统中所有 OSPF 区域必须连接到一个主干区域(Area 0)上。 区域内的 OSPF 路由器(内部路由器,IR)使用洪泛法(flooding)传送本区域内的链路状态信息,区域边界的 OSPF 路由器(区域边界路由器,ABR)将本区域的信息汇总发给其他区域,自治系统边界的 OSPF 路由器(自治系统边界路由器,ASBR)将自治 系统外的路由(外部路由)发布在自治系统中。主干区域中的 OSPF 路由器也称为“主干路由器”(BR)。ABR 不能向 OSPF 残桩区域(Stub Area)通告外部路由。在多址网络中,为了避免不必要的链路状态洪泛,需要选举 1 个指定路由器(DR)和 1 个备份指定路由器(BDR)。OSPF 协议有 5 种类型的报文,它们被直接封装在 IP 分组中多播发送。 - 问候(Hello)报文:用来建立并维护 OSPF 邻接关系。在建立了邻接关系后, OSPF 路由器会定期发送 Hello 报文,来测试邻站的可达性。 - 数据库描述(DBD)报文:描述 OSPF 路由器的链路状态数据库的概要信息,即数据库中每一行的标题,它在两台相邻路由器彼此建立邻接关系时发送的。 - 链路状态请求(LSR)报文:由需要若干条特定路由信息的路由器发送出的,它的回答是 LSU 报文。新接入的路由器在收到 DBD 报文后,可以使用 LSR 报文请求关于某些路由的更多信息。 - 链路状态更新(LSU)报文:OSPF 的核心。OSPF 路由器使用 LSU 报文通告链路状态更新信息(即链路状态通告,LSA)每一个 LSU 报文可包含几个 LSA。, OSPF 协议的 LSA 有 5 种常用类型:路由器链路 LSA、网络链路 LSA、汇总链路到网络 LSA、汇总链路到 ASBR LSA 和外部链路 LSA。 5 种类型的 LSA这由不同类型的 OSPF 路由器产生,在特定类型的区域范围内扩散。 - 链路状态确认(LSAck)报文:用来确认每一个收到的 LSU 报文,使得 OSPF 协议的路由选择更加可靠。 二、实验目的 1、掌握 OSPF 协议中区域的类型、特征和作用 2、掌握 OSPF 路由器的类型、特征和作用 实用文档 3、掌握 OSPF LSA 分组的类型、特征和作用 4、理解 OSPF 区域类型、路由器类型和 OSPF LSA 分组类型间的相互关系
【实验报告】单轴电机运动控制实验报告范文
单轴电机运动控制实验报告范文 实验一晶闸管直流调速系统电流-转速调节器调试 一.实验目的 1.熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求。2.掌握直流调速系统主要单元部件的调试步骤和方法。 二.实验内容 1.调节器的调试 三.实验设备及仪器 1.教学实验台主控制屏。2.MEL―11组件3.MCL―18组件4.双踪示波器5.万用表 四.实验方法 1.速度调节器(ASR)的调试 按图1-5接线,DZS(零速封锁器)的扭子开关扳向“解除”。 (1)调整输出正、负限幅值“5”、“6”端接可调电容,使ASR调节器为PI 调节器,加入一定的输入电压(由MCL―18的给定提供,以下同),调整正、负限幅电位器RP1、RP2,使输出正负值等于5V。 (2)测定输入输出特性将反馈网络中的电容短接(“5”、“6”端短接),使ASR调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画 图1-5 速度调节器和电流调节器的调试接线图
出曲线。 (3)观察PI特性 拆除“5”、“6”端短接线,突加给定电压(0.1V),用慢扫描示波器观察输出电压的变化规律,改变调节器的放大倍数及反馈电容,观察输出电压的变化。反馈电容由外接电容箱改变数值。 2.电流调节器(ACR)的调试按图1-5接线。 (1)调整输出正,负限幅值 “9”、“10”端接可调电容,使调节器为PI调节器,加入一定的输入电压,调整正,负限幅电位器,使输出正负最大值等于5V。 (2)测定输入输出特性 将反馈网络中的电容短接(“9”、“10”端短接),使调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画出曲线。 (3)观察PI特性 拆除“9”、“10”端短接线,突加给定电压,用慢扫描示波器观察输出电压的变化规律,改变调节器的放大倍数及反馈电容,观察输出电压的变化。反馈电容由外接电容箱改变数值。 一.实验目的 1.了解双闭环不可逆直流调速系统的原理,组成及各主要单元部件的原理。2.熟悉电力电子及教学实验台主控制屏的结构及调试方法。3.熟悉MCL-18,MCL-33的结构及调试方法
电子科大-系统结构实验-解决数据冒险
实 验 报 告 课程名称:计算机系统结构实验学院:计算机科学与工程学院专业:计算机科学与技术 指导教师:好老师 学生姓名:爱学习的小学生 20实验成绩: 日期:2017年5月19日
电子科技大学计算机学院实验中心 电子科技大学 实验报告 一、实验项目名称:解决数据冒险 二、实验室名称:主楼A2-412 实验时间:2017年5月19日 三、实验目的 在给出的流水线代码基础上,增加内部前推数据通路、暂停流水线数据通路和关闭写使能信号的数据通路,解决普通的数据冒险和load数据冒险,通过完成本次实验,更好地理解和掌握解决数据冒险的原理,学以致用,增强编写程序的能力。 四、实验原理 (一)数据冒险的定义 由于流水线上指令重叠执行,改变了原来串行执行的读/写操作数顺序,使得后面依赖前面指令结果的指令得不到准备好的数据,这样的现象叫做数据冒险(数据相关)。 回顾数据冒险的程序例子 I1: add r1,r2,r3 I2: sub r4,r1,r5 I3: and r6,r7,r1 I4: or r8,r1,r9 I5: addi r10,r1,100
I1下面有3条指令不能从寄存器r1读出正确的数据。 (二)数据冒险的解决方案 1、暂停流水线 如上图所示,暂停流水线到最初的指令执行完毕,可以解决数据冒险,但是会涉及到两个问题,即“如何检测出数据冒险”和“如何暂停流水线”。 如何检测数据冒险 a.比较器; I1指令写目的寄存器rd,I2和I3的源操作数是寄存器rs1或rs2中的数据,I2、I3的rs1或rs2与I1的目的寄存器号rd相等时才有可能发生数据冒险。 b.操作码参与检测; 由于指令格式中源寄存器号rs2与立即数部分重叠,而立即数是不会出现冒险的,因此,指令操作码必须要参与检测(区分是寄存器操作数还是立即数)。 c.WREG信号也应参与检测(实际上,WREG也是从操作码中得出的);
电子科大实验报告撰写格式规范
实验报告撰写格式规范 一、一般格式和顺序 1、封面: (1)题目:应能概括整个论文最重要的内容,具体、切题、不能太笼统,但要引人注目;题名力求简短,严格控制在25字以内。 (2)导师:指导教师的署名一律以批准招生的为准,如有变动应正式提出申请并报研究生院备案,且只能填写指导教师一名。 (3)学生姓名和学号。 2、摘要:论文第一页为中文摘要,约500-800字左右。 内容应包括工作目的、研究方法、成果和结论,语言力求精炼。 3、目录:应是实验报告的提纲,也是实验报告组成部分的小标题,其内容从第一章开始。 4、主要符号表:如果实验报告中使用了大量的物理量符号、标志、缩略词、专门计量单位、自定义名词和术语等,应编写成注释说明汇集表。假如上述符号和缩略词使用数量不多,可以不设专门的汇集表,而在论文中出现时加以说明。 5、引言(第一章):在实验报告正文前,内容为:该研究工作的实用价值或理论意义;实验报告所要解决的问题。 6、正文:是实验报告的主体。按照仿真的步骤来逐一完成。 7、结论(最后一章):应明确、精炼、完整、准确,使人只要一看结论就能全面了解实验报告的意义、目的和工作内容。 8、工作分工:阐述每个成员的工作。 9、参考文献:如有,在这里列出。 二、论文的书写 1、语言表述 (1)论文应层次分明、数据可靠、文字简练、说明透彻、推理严谨,立论正确,避免使用文学性质的带感情色彩的非学术性词语。 (2)论文中如出现一个非通用性的新名词、新术语或新概念,需立即解释清楚。 2、层次和标题 (1)层次要清楚:标题要重点突出,简明扼要。 (2)层次代号的格式如下: 第一章××××(居中书写) 1.1 ×××× 1.1.1 ×××× 3、页眉和页码 页眉: (1)对摘要、目录等前置部分,页眉全用各部分内容的标题。
运动控制仿真实验报告
运动控制仿真实验报告 姓名:班级:学号: ——晶闸管三相全控桥式整流仿真实验 ——实用 Buck 变换仿真实验 晶闸管三相全控桥式整流仿真实验(大电感负载) 原理电路:
R2 晶闸管三相可控整流仿真实验2原理电路框图 输入三相交流电,额定电压380伏(相电压220伏),额定频率50Hz,星型联接。输入变压器可省略。为便于理解电路原理,要求用6只晶闸管搭建全控桥。 实验内容: 1、根据原理框图构建Matlab仿真模型。所需元件参考下表: 仿真元件库:Simulink Library Browser 示波器Simulink/sink/Scope 要观察到整个仿真时间段的结果波形必须取消对输出数据的5000点限制。 要观察波形的FFT结果时,使能保存数据到工作站。仿真结束后即可点击仿真模型左上方powergui打开FFT窗口,设定相关参数:开始时间、分析波形的周期数、基波频率、最大频率等后,点Display即可看到结果。 交流电源SimPowerSystems/Electrical Sources/AC Voltage Source 设定频率、幅值、相角,相位依次滞后120度。 晶闸管SimPowerSystems/Power Electronics/Thyristor 6脉冲触发器SimPowerSystems/Extra Library/Control Blocks/Synchronized 6-Pulse Generator 设定为50Hz,双脉冲 利用电压检测构造线电压输入。Block端输入常数0. 输出通过信号分离器分为6路信号加到晶闸管门极,分离器输出脉冲自动会按顺序从1到6排列,注意按号分配给主电路对应晶闸管。 电阻、电容、电感SimPowerSystems/Elements/Series RLC Branch 设定参数 负载切换开关SimPowerSystems/Elements/Breaker 设定动作时间 信号合成、分离Simulink/Signal Routing/Demux,Mux 电流傅立叶分解SimPowerSystems/Extra Library/Discrete Measurements/Discrete Fourier 设定输出为50Hz,基波 有效值SimPowerSystems/Extra Library/Discrete Measurements/Discrete RMS value 设定为50Hz 位移功率因数计算Simulink/User-Difined Functions/Fcn 将度转换为弧度后计算余弦
运动控制综合实验报告
班级:学号:姓名:指导老师:
实验一不可逆单闭环直流调速系统静特性的研究一.实验目的 1.研究晶闸管直流电动机调速系统在反馈控制下的工作。 2.研究直流调速系统中速度调节器ASR的工作及其对系统静特性的影响。 3.学习反馈控制系统的调试技术。 二.预习要求 1.了解速度调节器在比例工作与比例—积分工作时的输入—输出特性。 2.弄清不可逆单闭环直流调速系统的工作原理。 三.实验线路及原理 见图4-7。 四.实验设备及仪表 1.MCL系列教学实验台主控制屏。 2.MCL—31A组件(适合MCL—Ⅲ)。 3.MCL—33(A)组件 4.MEL-11挂箱 5.MEL—03三相可调电阻(或自配滑线变阻器)。 6.电机导轨及测速发电机、直流发电机M01(或电机导轨及测功机、MEL—13组件)。 7.直流电动机M03。 8.双踪示波器。 五.注意事项 1.直流电动机工作前,必须先加上直流励磁。 2.接入ASR构成转速负反馈时,为了防止振荡,可预先把ASR的RP3电位器逆时针旋到底,使调节器放大倍数最小,同时,ASR的“5”、“6”端接入可调电容(预置7μF)。 3.测取静特性时,须注意主电路电流不许超过电机的额定值(1A)。 4.三相主电源连线时需注意,不可换错相序。 5.电源开关闭合时,过流保护发光二极管可能会亮,只需按下对应的复位开关SB1即可正常工作。 6.系统开环连接时,不允许突加给定信号U g起动电机。 7.起动电机时,需把MEL-13的测功机加载旋钮逆时针旋到底,以免带负载起动。 8.改变接线时,必须先按下主控制屏总电源开关的“断开”红色按钮,同时使系统的给定为零。 9.双踪示波器的两个探头地线通过示波器外壳短接,故在使用时,必须使两探头的地线同电位(只用一根地线即可),以免造成短路事故。
电子科技大学通信原理实验实验报告2
电子科技大学通信学院 最佳接收机(匹配滤波器) 实验报告 班级 学生 学号 教师任通菊
最佳接收机(匹配滤波器)实验 一、实验目的 1、运用MATLAB软件工具,仿真随机数字信号在经过高斯白噪声污染后最佳的恢复的方法。 2、熟悉匹配滤波器的工作原理。 3、研究相关解调的原理与过程。 4、理解高斯白噪声对系统的影响。 5、了解如何衡量接收机的性能及匹配滤波器参数设置方法。 二、实验原理 对于二进制数字信号,根据它们的时域表达式及波形可以直接得到相应的解调方法。在加性白高斯噪声的干扰下,这些解调方法是否是最佳的,这是我们要讨论的问题。 数字传输系统的传输对象是二进制信息。分析数字信号的接收过程可知,在接收端对波形的检测并不重要,重要的是在背景噪声下正确的判断所携带的信息是哪一种。因此,最有利于作出正确判断的接收一定是最佳接收。 从最佳接收的意义上来说,一个数字通信系统的接收设备可以看作一个判决装置,该装置由一个线性滤波器和一个判决电路构成,如图1所示。线性滤波器对接收信号进行相应的处理,输出某个物理量提供给判决电路,以便判决电路对接收信号中所包含的发送信息作出尽可能正确的判决,或者说作出错误尽可能小的判决。 图1 简化的接收设备 假设有这样一种滤波器,当不为零的信号通过它时,滤波器的输出能在某瞬间形成信号的峰值,而同时噪声受到抑制,也就是能在某瞬间得到最大的峰值信号功率与平均噪声功率之比。在相应的时刻去判决这种滤波器的输出,一定能得到最小的差错率。 匹配滤波器是一种在最大化信号的同时使噪声的影响最小的线性滤波器设计技术。注意:该滤波器并不保持输入信号波形,其目的在于使输入信号波形失 t输出信号值相对于均方根(输出)噪声值达到真并滤除噪声,使得在采样时刻 最大。
电子科技大学实验报告撰写模板
电子科技大学 实验报告 ( 2018 - 2019 - 2 ) 学生姓名:学生学号:指导老师: 实验学时:1.5h 实验地点:基础实验大楼425 实验时间:2019.4.9 14:30—16:00 报告目录 一、实验课程名称:电路实验I 1.实验名称:BJT放大器设计与测试 二、实验目的: 1. 了解BJT管的基本放大特性。 2. 掌握BJT共射放大电路的分析与设计方法。 3. 掌握放大电路静态工作点的测试方法。 4. 掌握放大电路放大倍数(增益)的测试方法。 5. 掌握放大电路输入、输出电阻的测试方法。 6. 掌握放大电路幅频特性曲线的测试方法。 三、实验器材(设备、元器件): GDS1152A型数字示波器一台。 EE1641B1型函数发生器一台。
通用面包板一个。 1kΩ电阻;10mH电感;0.047μF电容若干。 四、实验原理:
3、测试方法 (1)静态工作点调整与测试 对直流电压的测量一般用数字万用表。测量静态工作点时测出晶体管各管脚对地的电压。 (2)放大倍数的测试 用晶体管毫伏表或者示波器直接测量输出、输入电压,由 Av=vo/vi 即可得到。(3)放大器输入电阻的测试
在放大器输入端口串入一个取样电阻R,用两次电压法测量放大器的输入电阻Ri。 (4)放大器输出电阻的测试 在放大器输出端口选择一个合适的负载电阻RL,用两次电压法分别测量空载与接上负载时的输出电压,计算输出电阻Ro。 (5)放大器频率特性的测试 用点频法测试法测量放大器的频率特性,并求出带宽。 五、实验内容: (1)静态工作点的测试 (2)电压增益测试 (3)输入电阻测试 (4)输出电阻测试 (5)幅频特性测试 六、实验数据及结果分析: 1、静态工作点调整与测试 令VCC=+12V,用万用表测量VE、VB、VC,计算VBE、IEQ、VCE,数据记入表格中。 2、放大倍数的测试 用函数发生器输出一个正弦波信号作为放大器的输入信号,设置信号频率 f =1kHz,(有效值)Ui=5mV,测量U0 ,计算放大器的电压放大倍数(增益)Av。数据填入表中,定量描绘输出波形图。
电子科技大学微嵌实验最新版
电子科技大学微嵌实验最新版
电子科技大学 实验报告 修正了M00和旧版答案的错误,代码使用Keil uVision5 均已调试通过。课程名称微处理器系统结构与嵌入式系统设计_____________________ 实验名称ARM基础编程实验_____________________________________ 任课教师________ 实验教师 ________ 姓名 ______ 学号__________ 实验地点分组号时间年月日、实验目的 1.熟悉并掌握常用ARM匚编指令 2.熟悉并掌握C+汇编混合编程技术 3.熟练使用ARM软件开发调试工具Keil _、实验内容 1.学习使用Keil开发工具 2.使用ARM匚编语言,编程头现1+2+ ...... +N累加运算功冃匕 3.使用C调用汇编函数,实现字符串拷贝功能 4.使用汇编调用C函数,实现求和运算功能 5.使用ARM匚编语言,实现冒泡排序算法(选做) 三、实验步骤
1.实验1.1 :运行Keil ,建立工程文件,单步运行调试演示示例程 序,深刻理解每一条指令,观察寄存器,内存空间的变化。 2.实验1.2 :用汇编语言实现1+2+...+N的累加: a)建立新工程,加入实验1.2文件夹中的sum.s。 b)用汇编补充算法核心部分,代码参考流程图如下图 1.1所示。 c)使用单步调试,仔细观察过程中关键寄存器值的变化。 R0暂存累加和 图 3.实验1.3 : C调用汇编实现字符串拷贝功能: a)建立新工程,加入实验1.3文件夹中的ma in .c和 testfile.s(同一个工程下添加两个文件一起编 译)。 b)补充完成源代码中缺失的部分,分别实现 1.拷贝源字符串的一个字节到R2中; 2.将拷贝的字节复制到目标空间。 c)运行Debug进行调试。 4.实验1.4 :汇编调用C实现求和1+2+...+10 : a)建立新工程,加入实验1.4文件夹中的sum.c和 testfile.s(同一个工程下添加两个文件一起编 译)。 b)补充完成源代 码中缺失的部分,通过调用c函数 g()实现1+2+3+glovb1,结果存在R8中。 c)运行Debug进行调试
电子科大射频实验报告_
电子科技大学通信射频电路实验报告 学生姓名: 学号: 指导教师:
实验一选频回路 一、实验内容: 1.测试发放的滤波器实验板的通带。记录在不同频率的输入下输出信号的 幅度,并绘出幅频响应曲线。 2.设计带宽为5MHz,中心频率为39MHz,特征阻抗为50欧姆的5阶带 通滤波器。 3.在ADS软件上对设计出的带通滤波器进行仿真。 二、实验结果: (一)低通滤波器数据记录及幅频响应曲线 低通滤波器数据记录表 频率/MHz 0 0.5 1 1.5 2 2.5 3 3.5 4 幅度/mV 1020 1030 1060 1110 1120 1060 944 840 768 频率/MHz 4.5 5 5.2 5.4 5.6 5.8 6 6.2 6.4 幅度/mV 712 672 656 640 624 600 580 556 528 频率/MHz 6.6 6.8 7 7.2 7.4 7.6 7.8 8 8.2 幅度/mV 500 468 444 412 388 356 332 308 280 频率/MHz 8.4 8.6 8.8 9 9.5 10 10.5 11 11.5 幅度/mV 256 236 216 196 156 116 88 66 49.2 频率/MHz 12 12.5 13 13.5 14 14.5 15 15.5 16 幅度/mV 37.2 28.2 21.8 17 13.4 10.8 8.6 7.4 6 频率/MHz 16.5 17 17.5 18 18.5 19 19.5 20 幅度/mV 5.2 2.4 2.2 1.4 1.2 1.2 1.2 1.8
《MATLAB与控制系统。。仿真》实验报告
《MATLAB与控制系统仿真》 实验报告 班级: 学号: 姓名: 时间:2013 年 6 月
目录实验一MATLAB环境的熟悉与基本运算(一)实验二MATLAB环境的熟悉与基本运算(二)实验三MATLAB语言的程序设计 实验四MATLAB的图形绘制 实验五基于SIMULINK的系统仿真 实验六控制系统的频域与时域分析 实验七控制系统PID校正器设计法 实验八线性方程组求解及函数求极值
实验一MATLAB环境的熟悉与基本运算(一) 一、实验目的 1.熟悉MATLAB开发环境 2.掌握矩阵、变量、表达式的各种基本运算 二、实验基本原理 1.熟悉MATLAB环境: MATLAB桌面和命令窗口、命令历史窗口、帮助信息浏览器、工作空间浏览器、文件和搜索路径浏览器。 2.掌握MATLAB常用命令 表1 MATLAB常用命令 变量与运算符 3.1变量命名规则 3.2 MATLAB的各种常用运算符 表3 MATLAB关系运算符 表4 MATLAB逻辑运算符
| Or 逻辑或 ~ Not 逻辑非 Xor逻辑异或 符号功能说明示例符号功能说明示例 :1:1:4;1:2:11 . ;分隔行.. ,分隔列… ()% 注释 [] 构成向量、矩阵!调用操作系统命令 {} 构成单元数组= 用于赋值 的一维、二维数组的寻访 表6 子数组访问与赋值常用的相关指令格式 三、主要仪器设备及耗材 计算机 四.实验程序及结果 1、新建一个文件夹(自己的名字命名,在机器的最后一个盘符) 2、启动MATLAB,将该文件夹添加到MATLAB路径管理器中。 3、学习使用help命令。
计算机仿真实验报告实验
《计算机仿真》上机实验报告 姓名: 学号: 2012104021 专业:测控 班级: 12级
实验一常微分方程的求解及系统数学模型的转换一.实验目的 通过实验熟悉计算机仿真中常用到的Matlab指令的使用方法,掌握常微分方程求解指令和模型表示及转换指令,为进一步从事有关仿真设计和研究工作打下基础。 二. 实验设备 个人计算机,Matlab软件。 三. 实验准备 预习本实验有关内容(如教材第2、3、5章中的相应指令说明和例题),编写本次仿真练习题的相应程序。 四. 实验内容 1. Matlab中常微分方程求解指令的使用 题目一:请用MATLAB的ODE45算法分别求解下列二个方程。要求:1.编写出Matlab 仿真程序;2.画出方程解的图形并对图形进行简要分析;3.分析下列二个方程的关系。 1.2. 1.function fun=funl(t,x) fun=-x^2;
[t,x]=ode45('fun1',[0,20],[1]); figure(1);plot(t,x); grid 2.function fun=fun2(t,x) fun=x^2; [t,x]=ode45('fun2',[0,20],[-1]); figure(2);plot(t,x); grid
题目二:下面方程组用在人口动力学中,可以表达为单一化的捕食者-被捕食者模式(例如,狐狸和兔子)。其中1x 表示被捕食者, 2x 表示捕食者。如果被捕食者有无限的食物,并且不会出现捕食者。于是有1'1x x ,则这个式子是以指数形式增长的。大量的被捕食者将会使捕食者的数量增长;同样,越来越少的捕食者会使被捕食者的数量增长。而且,人口数量也会增长。请分别调用ODE45、ODE23算法求解下面方程组。要求编写出Matlab 仿真程序、画出方程组解的图形并对图形进行分析和比较。 1.ODE45
数字集成电路设计实验报告
哈尔滨理工大学数字集成电路设计实验报告 学院:应用科学学院 专业班级:电科12 - 1班 学号:32 姓名:周龙 指导教师:刘倩 2015年5月20日
实验一、反相器版图设计 1.实验目的 1)、熟悉mos晶体管版图结构及绘制步骤; 2)、熟悉反相器版图结构及版图仿真; 2. 实验内容 1)绘制PMOS布局图; 2)绘制NMOS布局图; 3)绘制反相器布局图并仿真; 3. 实验步骤 1、绘制PMOS布局图: (1) 绘制N Well图层;(2) 绘制Active图层; (3) 绘制P Select图层; (4) 绘制Poly图层; (5) 绘制Active Contact图层;(6) 绘制Metal1图层; (7) 设计规则检查;(8) 检查错误; (9) 修改错误; (10)截面观察; 2、绘制NMOS布局图: (1) 新增NMOS组件;(2) 编辑NMOS组件;(3) 设计导览; 3、绘制反相器布局图: (1) 取代设定;(2) 编辑组件;(3) 坐标设定;(4) 复制组件;(5) 引用nmos组件;(6) 引用pmos组件;(7) 设计规则检查;(8) 新增PMOS基板节点组件;(9) 编辑PMOS基板节点组件;(10) 新增NMOS基板接触点; (11) 编辑NMOS基板节点组件;(12) 引用Basecontactp组件;(13) 引用Basecontactn 组件;(14) 连接闸极Poly;(15) 连接汲极;(16) 绘制电源线;(17) 标出Vdd 与GND节点;(18) 连接电源与接触点;(19) 加入输入端口;(20) 加入输出端口;(21) 更改组件名称;(22) 将布局图转化成T-Spice文件;(23) T-Spice 模拟; 4. 实验结果 nmos版图
动态系统建模仿真 实验报告
动态系统建模仿真实验报告 实验二,实验四 姓名 学号
实验二直流电动机-负载建模及仿真实验 1实验内容 在运动控制系统中电机带动负载转动,电机-负载成为系统的被控对象。本实验项目要求根据电机工作原理及动力学方程,建立模型并仿真。 2实验目的 掌握直流电动机-负载的模型的建立方法; 3实验器材 (1)硬件:PC机。 (2)工具软件:操作系统:Windows系列;软件工具:MATLAB及simulink。 4实验原理 在很多应用场合中,直流电动机的输出轴直接与负载轴相连,转动部件固定在负载轴上,即为常见的电机直接驱动负载形式。如果不考虑传动轴在转动过程中的弹性形变,即把传动轴的刚度看作无穷大,就可以在系统设计过程中,将执行电机和负载视为一个整体对象,这样被控对象的模型就可以用如图2.1所示的 框图来表示。其中 U表示控制电压;a U,a L,a R分别表示电机的电枢电压,电 r 枢电感和电枢电阻; J为电机的转动惯量,L J为负载的转动惯量,包括由电机 m 驱动的转动体、轴承内圈、转动轴、轴套、速度测量元件、角度测量元件以及被测试件折合到电机轴上的转动惯量等; D、L D分别表示电机和负载的粘性阻尼 m 系数; k为电机的电磁力矩系数;e k为电机的反电势系数;mθ为电机-负载的转 m 角, θ 为电机-负载的角速度。 m 在这一实验中,认为电机与负载的转角是相同的,并考虑了电机及负载转动中产生的粘滞阻尼力矩,所以其电压方程、力矩方程变为如下形式
?????+=+--=+=-s s J J D D M s I k s k s E s s I T s I Ra s E s Ua m l m L m l m m e l )()()()()()())()(()()(θθ (2.1) 由方程组(2.1)可以得到相应的结构框图如图1所示。 图1直流电动机-负载数学模型结构框图 5实验要求: (1)建立从a u 到m θ 的传递函数模型,求其频率特性,并与项目1中的电机频率特性进行对比。 (2)分别取(Dm+D L )1=0.1(Dm+D L )和(Dm+D L )2=0.01(Dm+D L ),编制MATLAB 或simulink 程序,比较阻尼系数不同时电机-负载模型的频率特性。 (3)分别取J L1=0.1J L 和J L 2=10J L ,编制MATLAB 或simulink 程序,比较电机-负载模型的频率特性。 实验所需具体参数如下表。
电子科大计算机操作系统实验报告级
电子科技大学 实验报告 学生姓名:郫县LBJ 学号:指导教师:温柔可爱的刘杰彦 实验地点:主楼A2-413 实验时间:2017年4月22日上午 一、实验室名称:计算机学院主楼机房 二、实验项目名称:进程与资源管理 实验分工:郫县LBJ 进程管理设计 郫县小胖子资源管理设计 郫县威斯布鲁克进程调度与时钟中断设计 三、实验学时:2 四、实验原理: 此处的实验原理在指导书上非常丰富,因此不照搬过来,主要写出所要使用到知识点,具体实现过程中的原理分析见报告第八部分“实验步骤”处。 (一)总体设计 系统总体架构如图1所示,最右边部分为进程与资源管理器,属于操作系统内核的功能。要求能够设计与实现一个简单的进程与资源管理器,具有如下功能:完成进程创建、撤销和进程调度;完成多单元 (multi_unit)资源的管理;完成资源的申请和释放;完成错误检测和定时器中断功能。 图1 系统总体结构 (二) Test shell设计 应具有的功能: 1、从终端或者测试文件读取命令; 2、将用户需求转换成调度内核函数(即调度进程和资源管理器); 3、在终端或输出文件中显示结果:如当前运行的进程、错误信息等。
(三)进程管理设计 1、进程状态与操作 2、进程控制块结构PCB 3、主要函数:创建进程、撤销进程 (四)资源管理设计 1、主要数据结构RCB 2、请求资源 3、释放资源 (五)进程调度与时钟中断设计 关键:使用基于优先级的抢占式调度策略,在同一优先级内使用时间片轮转算法。 参考课上ppt: 五、实验目的: 设计和实现进程与资源管理,并完成Test shell的编写,以建立系统的进程管理、调度、资源管理和分配的知识体系,从而加深对操作系统进程调度和资源管理功能的宏观理解和微观实现技术的掌握。 六、实验内容: 设计与实现一个简单的进程与资源管理器,要求具有如下功能:完成进程创建、撤销和进程调度;完成多单元 (multi_unit)资源的管理;完成资源的申请和释放;完成错误检测和定时器中断功能。 通过编写测试脚本(test shell)来完成对进程与资源管理器的测试。 七、实验环境(设备、元器件): Windows 7、Visual Studio 2015 八、实验步骤: (一)系统功能需求分析: (二)总体框架设计: 1、具体原理和总体工作流程分析: 首先,通过test shell从测试文件中读入各种命令。
运动控制实验报告标准范本
报告编号:LX-FS-A69109 运动控制实验报告标准范本 The Stage T asks Completed According T o The Plan Reflect The Basic Situation In The Work And The Lessons Learned In The Work, So As T o Obtain Further Guidance From The Superior. 编写:_________________________ 审批:_________________________ 时间:________年_____月_____日 A4打印/ 新修订/ 完整/ 内容可编辑
运动控制实验报告标准范本 使用说明:本报告资料适用于按计划完成的阶段任务而进行的,反映工作中的基本情况、工作中取得的经验教训、存在的问题以及今后工作设想的汇报,以取得上级的进一步指导作用。资料内容可按真实状况进行条款调整,套用时请仔细阅读。 实验一晶闸管直流调速系统电流-转速调节器调试 一.实验目的 1.熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求。2.掌握直流调速系统主要单元部件的调试步骤和方法。 二.实验内容 1.调节器的调试 三.实验设备及仪器 1.教学实验台主控制屏。2.MEL—11组件3.MCL—18组件4.双踪示波器5.万用表
四.实验方法 1.速度调节器(ASR)的调试 按图1-5接线,DZS(零速封锁器)的扭子开关扳向“解除”。 (1)调整输出正、负限幅值“5”、“6”端接可调电容,使ASR调节器为PI调节器,加入一定的输入电压(由MCL—18的给定提供,以下同),调整正、负限幅电位器RP1、RP2,使输出正负值等于5V。 (2)测定输入输出特性将反馈网络中的电容短接(“5”、“6”端短接),使ASR调节器为P 调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画 图1-5 速度调节器和电流调节器的调试接线图 出曲线。
电子科技大学逆向工程实验报告作业资料
电子科技大学 实 验 报 告 学生姓名:马侬 学号:20152*03**0* 指导教师:何兴高 日期:2016.7.15
一.题目名称:简易记事本软件逆向分析 二.题目内容 由于记事本功能简单,稍有经验的程序员都可以开发出与记事本功能近似的小软件,所以在一些编程语言工具书上也会出现仿照记事本功能作为参考的示例。为了便于分析因此选取了一个简易的记事本,因此本实验将着重研究从源程序到机器码的详细过程而不注重程序本身的功能。另一方面简易源程序代码约130多行。本实验目的是了解源程序是怎么一步步变成机器码的又是怎么在计算机上运行起来的。 三.知识点及介绍 利用逆向工程技术,从可运行的程序系统出发,运用解密、反汇编、系统分析、程序理解等多种计算机技术,对软件的结构、流程、算法、代码等进行逆向拆解和分析,推导出软件产品的源代码、设计原理、结构、算法、处理过程、运行方法及相关文档等。随着用户需求的复杂度越来越高软件开发的难度也在不断地上升快速高效的软件开发已成为项目成败的关键之一。为了提高程序员的产品率开发工具的选择尤为重要因为开发工具的自动化程度可以大大减少程序员繁琐重复的工作使其集中关注他所面临的特定领域的问题。为此当前的IDE不可避地要向用户隐藏着大量的操作细节而这些细节包含了大量的有价值的技术。 四.工具及介绍: 在对软件进行逆向工程时,不可避免地需要用到多种工具,工具的合理使用,可以加快调试速度,提高逆向工程的效率。对于逆向工程的调试环节来说,没有动态调试器将使用的调试工作很难进行。可以看出,各种有效的工具在逆向工程中占据着相当重要的地位,有必要对它们的用法做一探讨。 PE Explorer简介:PE Explorer是功能超强的可视化Delphi、C++、VB程序解析器,能快速对32位可执行程序进行反编译,并修改其中资源。 功能极为强大的可视化汉化集成工具,可直接浏览、修改软件资源,包括菜单、对话框、字符串表等;另外,还具备有W32DASM 软件的反编译能力和PEditor 软件的PE 文件头编辑功能,可以更容易的分析源代码,修复损坏了的资源,可以处理PE 格式的文件如:EXE、DLL、DRV、BPL、DPL、SYS、CPL、OCX、SCR 等32 位可执行程序。该软件支持插件,你可以通过增加插件加强该软件的功能,原公司在该工具中捆绑了UPX 的脱壳插件、扫描器和反汇编器.,出口,进口和延迟导入表的功能,使您可以查看所有的可执行文件使用的外部功能,和其中包含的DLL或库的基础上进