一种区间系统容错控制设计的新方法
105. 测控技术中的容错机制如何设计?

105. 测控技术中的容错机制如何设计?105、测控技术中的容错机制如何设计?在当今高度复杂和精密的测控系统中,容错机制的设计至关重要。
容错机制就像是为系统穿上了一层“防护服”,能够在出现故障或错误的情况下,依然保证系统的正常运行或在可接受的范围内继续工作。
那么,如何设计出有效的容错机制呢?首先,我们要明确容错机制的目标和要求。
这包括确定系统能够容忍的故障类型和程度,以及在出现故障时系统需要保持的性能水平。
例如,在某些关键的测控应用中,可能要求系统在部分组件故障的情况下仍能保持高精度和高可靠性的测量与控制。
接下来,对系统进行全面的故障模式和影响分析(FMEA)是必不可少的。
这意味着要仔细研究系统的各个组成部分,预测可能出现的故障模式,评估每种故障对系统性能的影响。
通过 FMEA,我们可以确定系统中的薄弱环节和关键组件,从而有针对性地进行容错设计。
在硬件方面,采用冗余设计是一种常见的容错策略。
这可以是部件级的冗余,比如使用多个相同的传感器来测量同一物理量,然后通过比较和综合它们的输出值来提高测量的可靠性;也可以是系统级的冗余,例如配置备用的控制器或执行机构。
冗余设计虽然增加了硬件成本,但能显著提高系统的容错能力。
除了冗余,硬件的容错还可以通过采用纠错码技术来实现。
例如,在数据传输和存储过程中,使用纠错码可以检测和纠正一定数量的错误比特,确保数据的准确性和完整性。
在软件方面,容错机制的设计也有很多方法。
错误检测和恢复技术是其中的关键。
通过在软件中添加错误检测代码,可以及时发现系统中的异常情况。
当检测到错误时,能够采取相应的恢复措施,如重新初始化、切换到备用算法或使用备份数据。
为了提高软件的容错性,还可以采用模块化和结构化的设计方法。
将软件功能划分为独立的模块,每个模块具有明确的接口和职责。
这样,当某个模块出现故障时,不会影响到其他模块的正常运行,并且便于对故障模块进行定位和修复。
此外,设计良好的异常处理机制也是软件容错的重要部分。
构建具有容错能力的系统架构的方法和技巧

构建具有容错能力的系统架构的方法和技巧在现代技术的发展中,随着系统规模的增大和复杂度的提升,如何构建具有容错能力的系统架构成为了一个重要的问题。
容错能力可以保证系统在遭受异常情况或者部分故障时能够继续运行,并提供可靠的服务。
本文将介绍一些构建具有容错能力的系统架构的方法和技巧。
一、系统设计原则1. 松耦合松耦合是指系统中各个模块之间的依赖关系尽量减少。
通过模块的解耦,可以使得系统中某个模块的故障不会影响到其他模块的正常运行。
常用的实现松耦合的方法包括消息队列、接口设计等。
2. 备份和冗余备份和冗余是容错系统中常用的策略之一。
通过在系统中增加备份节点或者冗余组件,可以确保在某个节点故障时,系统能够自动切换到备份节点或者其他冗余组件继续提供服务。
常见的备份和冗余技术包括主备切换、集群技术等。
3. 错误处理合理的错误处理是构建容错系统中不可或缺的一部分。
在系统设计中,需要考虑各种可能的错误情况,并针对这些错误情况进行相应的处理。
常见的错误处理方式包括重试机制、错误码设计、异常捕获等。
二、容错技术1. 故障检测与自动恢复系统中的故障检测和自动恢复是建立容错能力的关键。
通过在系统中引入监控组件,可以实时检测系统的运行状态。
一旦发现故障,系统会自动触发相应的恢复机制,例如重启故障节点、切换到备份节点等。
2. 数据备份与恢复数据是系统中最宝贵的资源之一。
为了保证系统在故障发生时能够及时恢复,需要对系统中的数据进行备份。
常用的数据备份技术包括分布式数据库、数据同步机制等。
3. 负载均衡负载均衡是保证系统运行稳定的重要手段。
通过在系统中引入负载均衡组件,可以将请求均匀地分发到各个节点上,以避免某个节点负载过重或者故障导致系统崩溃。
常用的负载均衡算法包括轮询、加权轮询、最少连接等。
4. 容灾设计容灾设计是构建容错系统的最重要环节之一。
通过在系统中设置备份节点、冗余组件、跨机房部署等手段,可以确保在灾难发生时,系统能够继续提供服务。
控制系统的容错技术分析

控制系统的容错技术分析控制系统的容错技术是指在控制系统中对于可能发生故障或错误的情况进行预测和处理,以保证系统能够继续正常工作或者快速恢复。
容错技术在各个领域的控制系统中都具有重要的应用,特别是对于安全关键型控制系统,容错技术的可靠性和鲁棒性非常重要。
容错技术主要分为硬件容错和软件容错两大类。
硬件容错技术是通过多样化和冗余设计来增加控制系统的可靠性。
常见的硬件容错技术包括冗余设计、故障屏蔽和故障恢复。
冗余设计是在控制系统中增加冗余元件,如冗余传感器、冗余执行器和冗余通信通道等。
冗余设计能够提高系统的容错能力,当一个元件发生故障时,系统可以切换到备用元件继续工作。
冗余设计可以采用独立冗余、冗余FT(Fault Tolerant)和冗余NFT(Non-Fault Tolerant)等多种方式,具体选择取决于系统的需求和成本控制。
故障屏蔽是通过传感器冗余、数据滤波和信号处理等方式来屏蔽或降低故障对系统的影响。
故障屏蔽技术能够通过检测和判断故障信号的合理性,提高系统的容错能力和可靠性。
故障恢复技术是指在发生故障后,系统能够自动或者通过操作员干预快速恢复到正常工作状态。
常用的故障恢复技术包括检测和诊断、重构和重组系统等。
检测和诊断技术能够快速检测故障并定位到具体的故障位置,从而快速采取相应的措施。
重构和重组系统是指当系统发生故障时,系统能够自动调整系统结构和参数,恢复到一个更可靠和稳定的状态。
软件容错技术主要是通过增加错误检测和纠正机制来提高软件系统的可靠性。
常见的软件容错技术包括编码和检错、多版本软件和软件补丁等。
编码和检错技术是通过在软件设计中增加冗余信息,在传输和运行过程中检测和修正错误。
常见的编码和检错技术包括CRC(Cyclic Redundancy Check)、海明码等。
多版本软件是指将软件设计为多个版本,每个版本处理相同的输入并给出相同的输出,通过比较多个版本的输出来检测和纠正错误。
软件补丁是指在软件运行过程中修正错误或者添加新功能的一种方法,通过及时打补丁可以有效提高系统的容错能力。
【CN110018639A】基于区间二型TS模型的网络化控制系统的鲁棒容错控制方法【专利】
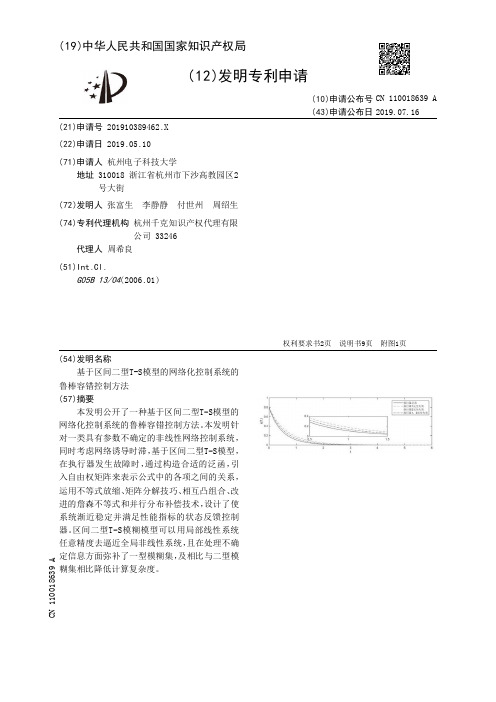
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910389462.X(22)申请日 2019.05.10(71)申请人 杭州电子科技大学地址 310018 浙江省杭州市下沙高教园区2号大街(72)发明人 张富生 李静静 付世州 周绍生 (74)专利代理机构 杭州千克知识产权代理有限公司 33246代理人 周希良(51)Int.Cl.G05B 13/04(2006.01)(54)发明名称基于区间二型T-S模型的网络化控制系统的鲁棒容错控制方法(57)摘要本发明公开了一种基于区间二型T -S模型的网络化控制系统的鲁棒容错控制方法。
本发明针对一类具有参数不确定的非线性网络控制系统,同时考虑网络诱导时滞,基于区间二型T -S模型,在执行器发生故障时,通过构造合适的泛函,引入自由权矩阵来表示公式中的各项之间的关系,运用不等式放缩、矩阵分解技巧、相互凸组合、改进的詹森不等式和并行分布补偿技术,设计了使系统渐近稳定并满足性能指标的状态反馈控制器。
区间二型T -S模糊模型可以用局部线性系统任意精度去逼近全局非线性系统,且在处理不确定信息方面弥补了一型模糊集,及相比与二型模糊集相比降低计算复杂度。
权利要求书2页 说明书9页 附图1页CN 110018639 A 2019.07.16C N 110018639A1.基于区间二型T -S模型的网络化控制系统的鲁棒容错控制方法,包括以下步骤:㈠:利用区间二型T -S模糊模型对网络控制系统建立模型,用IF -THEN规则描述网络控制系统如下:其中,N ai 是前件变量θa (x(t))(a=1,2,…,p)在第i(i=1,…,r)条规则下的模糊集;是系统状态向量;是控制输入向量;是干扰向量,且ω(t)∈L 2[0,∞);是输出向量;A i ,B 1i ,B 2i ,C i ,D i 是具有适当维数的常数矩阵;ΔA i ,ΔB 1i 是参数不确定性矩阵,且[ΔA i ΔB 1i ]=H i F(t)[E ai E bi ];Ηi ,E ai ,E bi 是已知矩阵,F(t)是未知矩阵,且满足F T (t)F(t)≤I;㈡:在不确定网络控制系统中加入隶属度函数,通过单点模糊化、乘积推理和中心平均去模糊化,上述网络控制系统的全局模型调整为:其中,[h i L (x (t ))h i U (x (t ))]是第i 条规则的激活强度;是θa (x (t ))的上下隶属度,且式(2)中的h i (x(t))如下定义:式(3)中是系统不确定相关的非线性函数,且满足㈢:在控制器中加入执行器容错控制矩阵:考虑执行器失效模型:u f (t)=M a u(t) (4)执行器容错矩阵:m ai和是一个标量;下面将给出不同执行器出现故障的情况:⑴:如果那么m ai =0这将代表着u i f (t)执行器完全失效;⑵:当那么m ai =1这将代表着u i f (t)执行器完全有效;⑶:当这将代表着u i f (t)执行器部分失效;假设传感器是时间驱动、控制器和执行器是事件驱动,网络控制时延τk =τk sc +τk c +τk ca ,这里的τk c 表示控制器的计算延迟时间,τk sc 表示传感器到控制器的延迟时间;τk ca 表示控制权 利 要 求 书1/2页2CN 110018639 A。
控制系统容错设计

控制系统容错设计控制系统在现代工程中起着至关重要的作用,它们用于监测、测量和控制各种物理系统,以确保其正常运行。
然而,由于各种原因,如设备故障、环境变化和人为错误,控制系统可能会出现故障。
为了保障系统的可靠性和稳定性,控制系统容错设计应运而生。
本文将探讨控制系统容错设计的概念、方法和应用。
一、概述控制系统容错设计是一种为系统引入容错机制以应对故障和异常情况的设计。
其主要目的是确保系统在故障情况下仍能够安全、有效地运行,从而保障系统性能和用户体验。
容错设计不仅仅是简单的故障检测和修复,它还涉及到系统的自我修复、冗余备份和恢复机制等方面。
二、容错设计的方法1. 备份和冗余通过引入备份和冗余机制,可以提高系统的可用性和容错性。
例如,可以使用双重控制器进行冗余,当一个控制器发生故障时,系统可以自动切换到备用控制器,确保系统的持续运行。
此外,还可以使用备用电源、备用传感器等冗余设备,以应对设备故障或损坏的情况。
2. 故障检测与诊断为了及时发现和诊断系统故障,可以在系统中引入故障检测和诊断模块。
该模块能够对系统的各种参数、设备状态进行监测和分析,通过与预设故障模型进行比对,判断系统是否存在故障,并尽可能给出故障的具体位置和原因。
这样,操作人员就可以快速采取相应的修复措施,以恢复系统的正常工作。
3. 自我修复和恢复机制对于一些简单的故障,系统可以通过自主进行修复和恢复。
例如,当某个传感器异常时,系统可以自动屏蔽该传感器的数据并切换到备用传感器。
当故障的设备恢复正常时,系统又可以自动切换回原来的配置。
这种自我修复和恢复机制能够有效地减少人为干预和维护工作,提高系统的可靠性和稳定性。
三、应用案例1. 工业自动化系统在工业自动化领域,控制系统容错设计至关重要。
例如,对于一个生产线控制系统,如果某个工作站发生故障,系统应该能够自动将任务切换到其他工作站,以确保生产的连续性。
此外,系统还应具备故障检测和诊断能力,以及自主修复和恢复的机制。
控制系统设计中的系统故障诊断与容错控制

控制系统设计中的系统故障诊断与容错控制引言:控制系统在现代工业中起着至关重要的作用。
然而,由于系统的复杂性和环境的不确定性,系统故障是无法避免的。
为了确保系统的可靠运行,系统故障诊断和容错控制成为控制系统设计中的重要组成部分。
本文将探讨控制系统设计中的系统故障诊断和容错控制的方法与技术。
一、系统故障诊断在控制系统中,故障诊断的目标是快速准确地检测和定位系统故障,以便及时采取纠正措施。
常用的故障诊断方法包括模型基准法、模式识别法和统计分析法。
1. 模型基准法模型基准法是一种通过与已知模型进行比较来诊断系统故障的方法。
该方法主要适用于已建立了系统的数学模型的情况。
通过比较模型输出与实际输出之间的差异,可以确定系统中的故障存在。
2. 模式识别法模式识别法是一种基于观测数据和模式识别技术来判断系统故障的方法。
该方法通过分析系统的输入和输出信号的模式以及信号的统计特性来检测和诊断系统故障。
3. 统计分析法统计分析法是一种基于统计学原理的故障诊断方法。
该方法通过对系统的输入和输出信号进行统计分析,如方差分析、相关性分析等,以判断系统是否存在故障。
二、容错控制容错控制是指在系统发生故障时,通过采取相应的控制策略,使系统能够继续正常工作或降低故障对系统性能的影响。
1. 重构控制重构控制是一种通过重建系统模型或重新设计控制器的方法来实现容错控制的策略。
当系统发生故障时,通过重新计算控制器参数或采用备用控制器来保证系统的正常运行。
2. 切换控制切换控制是一种通过在系统发生故障时切换到备用控制器或备用设备来实现容错控制的策略。
通过切换控制器或设备,系统可以继续工作而不影响整个系统的性能。
3. 容错算法容错算法是一种通过在控制系统中引入容错机制来实现容错控制的策略。
容错算法可以对系统的输入和输出信号进行纠正和调整,从而保证系统的鲁棒性和稳定性。
结论:系统故障诊断和容错控制是控制系统设计中必不可少的步骤。
通过合理选择故障诊断方法和容错控制策略,可以确保控制系统的可靠性和稳定性。
一种新的分布式控制系统容错调度算法
针对上述问题 ,本文将周期任务集根据处理机的数量划 分 为周期任 务子 集 ,每个处理机调度不 同的周期任务子集 ,
由于每 个处理机 上运行的周期任务不 同,因此计算出 的预留 时间也不同。 当非周期任务 由于频繁到来而难以充分响应时, 可 以将 这 些任务 调度到 那些 周期任 务负 担较轻 的处理机 运 行 ,这样既可以有效保证周期任务 的调度 ,也可 以充分响应 非周期任务 的要 求,从而提高 了控制系统容错调度 的效率 。
第3 6
计
算
机
工
程
21 00年 1 月
J n a y2 1 a u r 0 0
No 2 .
Co mp t r En i e r n u e gn e i g
博士论文 ・
一
文 编 o _3 8 o ) — 0 — 3 文 标 码: 章 号t o-4 ( l o 0 5 0 1 0 22 o2 l 一 献 识 A
中 分 号 P12 圈 类 l 3. T 1
种新 的分布 式控制 系统容错调 度 算法
盂庆春 ,刘云觯
( 国科学院力学研 究所 ,北京 1 0 9 ) 中 0 10
摘
要 :目前多数容错 调度算法在调度非周期任务 时采用预 留时间的方法 ,非周期任务无法得到充分响应 。针对该 问题 ,提 出一种新 的分
f ly r s o s e n n p ro i s s I r e o s l e t e p o l m n i n d a v , h sp p rp o o e e f ul t l r n c e u ea g rt m o u l e p n e t o — e d c t k . n o d rt o v r b e me t e bo e t i a e r p s sa n w a t o e a t h d l l o h f r h i a h o — s i d srb t d c n r y t m . tu e e me o f p ri o i g t e t s s t t x c t i e e t p ro i a k s b e n d fe e tp o e s r n o iti u e o t s se ol I s s t t d o a t i n n h a k e O e e u e d f r n e d c t s u s ti i r n r c s o s a d t h h t i g a a te e r r e s r sd fe e t e e ve me V h n t e n n p ro i a k sa t, e me o a c e u e i e e t l . s l m a ie t a u r n e ve y p oc s o i r n s r d t ha r i . g e o - e d c t s t rs t t d c n s h d l t f ci y Re u t n f sst t h i h h ve h n w t o a r v st e e i in y o ef u tt l r ts h d l . e me h d c n i mp o e f c e c f h a l o e a c e u e h t — n
一种新的容错控制方法
一种新的容错控制方法
李秀平;靳蕃
【期刊名称】《西南交通大学学报》
【年(卷),期】1995(030)003
【摘要】本文提出了一种新的容错控制方法,故障检测由神经网络构成,而容错控制器则采用模糊逻辑进行设计。
该方法对难于精确建模的对象和过程特别适用,且也能在一定程度上适用于非线性对象,仿真结果表明了该方法的有效性。
【总页数】6页(P336-341)
【作者】李秀平;靳蕃
【作者单位】不详;不详
【正文语种】中文
【中图分类】TP302.8
【相关文献】
1.一种新的基于Type-2模糊系统的模糊容错控制方法 [J], 钱冰冰
2.一种基于内外环结构的四旋翼飞行器容错控制方法 [J], 郑佳静;李平
3.一种故障干扰解耦的航天器主动容错控制方法 [J], 宗群;杨希成;张秀云;刘文静
4.一种开关磁阻电机无位置传感器低速起动冗余容错控制方法及应用 [J],
5.一种离线电子钱包交易的双向容错控制方法 [J], 杨平平
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 问题 描述
考 虑 的线性 不确 定连续 系统 为
f ( = xt+ ut十 ∞ , it A ( B ( D ( t) ) ) )
l( =C ( zt xt ) )
,、 1
J ,
其中: ∈ 为具有零初值的状态向量 ; ∈ 为控制变量 ;z R 为被控输出;∞ f∈ R” Rp ∈ ( R 为零均值高斯 ) 白噪声过程 , 其强度为 > 且 o t与零均值初始状态 () 0, J ) ( 0 不相关 ; , , D为具有适当维数的矩阵 , 一 一 A B C,
次.这些基于顶点或棱面的判据 ,计算量都相当庞大 , 通常仅具理论意义.因此 , 寻求简单而有效的区间 矩阵鲁棒稳定性判据仍然具有深远 的理论和实际意义.由于二次稳定性原理在处理不确定系统鲁棒稳定性 问题时的方便性和有效性,已有学者把其应用于区间系统的研究 中I . 本文把带有执行器故障的不确定系统转化为区间系统,应用区间系统 的相关理论解决了不确定系统的 容错控制问题.应用L I M 技术 ,把相关性能指标约束对应的不等式问题转化为凸优化问题 , 最后通过解线
第 3 卷 第 2 0 期
2 0 正 01
高 师 理 科 学 刊
J u n l fS in e fTe c es C ie e a d n v ri o r a o ce c o a h r olg n U iest y
V 13 No2 0. 0 .
3月
Ma . r
2 0 01
文章 编号 :10 — 8 2 1 0 — 0 4 0 07 9 3 1( 0 0) 2 0 0 — 6
一
种 区间系统容错 控制设计 的新方法
高有才 ,王树彬
(. 1 大庆 师范 学院 教 育科 学学院 ,黑 龙江 大 庆 13 1 ;2 672 ,中 国石油大 学 信息 与控 制工程 学 院 ,山东 东 营 2 76 ) 5o 2
阐述 ,并给出了区间系统的鲁棒控制在飞行控制上的应用. 目 ,研究区间系统的大部分都是保证区间矩 前 阵鲁棒稳定的充分条件.其中的充分必要条件 , 可分为2 类.一是基于区间矩阵的有限划分, 但在每一子 区 间上应用的仍然是充分条件 . ~ 二是基于所有顶点或棱面矩阵的判别 ( 如文献[ 提出了区间矩阵鲁棒稳定 , 6 】 当且仅 当所有的二维棱面稳定 ).文献[基于顶点矩阵的适当变换 ,提出了充分必要条件.通过关键顶点 7 ] 矩阵的引入 ,表面上似乎减少 了顶点判别数 ,但事实上其关键顶点的标识过程 已经把所有顶点都处理了一
{ RⅫ『 d ( , ) l, = 2 , , =7 RM d(,, , , I ie , f 1, n 7 =a … I 1 , … j {∈ 。 =a J ) ∈ J g 7 , , 6 J i … 印 仃 g < f1, , 1,,} l: 2 n = 2 p ’ ,… , , … .
第 2期
高有才 ,等 :一种 区间系统容错控制设计的新方法
5
A∈ , 1 Q .其 中:P < q( ’ 12 …, ) 这 里 P=(d, “ 以 < uf 『 , , n , , = p )A=( )a=(Ⅱ .把故障阵M 和输入 以 , q)
阵B的波动 结合 , 共同看成是 曰阵的波动. 假设矩阵B的波动范围是 :S<一< , B 表示为 ∈ S ] I, .
其中: = A = A A+ A; B+ B;△ A,A B是时变参数不确定性 ;C ,D 已知. 考虑 到 可能 的执行 器 故障 ,引入开 关 阵 M . 假设矩 阵 A 的波 动范 围是 : P< A< ,表 示 为 Q
收 稿 日期 家 自然科 学 基金资 助项 目 ( 07 0 2 654 8 ) 作者 简介 : 高有 才 ( 9 8 , , 16一) 男 黑龙 江 大庆 人 ,剐教授 , 士 , 硕 从事 最 优控制 、 智能 控制 、人 :神经 网络 应用研 究.E m i gh sh 6 . I 】 — al cbh@13C I : OI
即把 系统看 作是 一 区间系统 , A, 看 作 是 区间矩 阵.令 :P+Q ~ 下
,
H :下 P Q-
:
) 曰: , 。
,
G :
…
: ) 义 阵 , 矩 : 定
, × ), 口
,, ,, … 瓜 …
,, , : …瓜
,, …
,, …
,
F= ,其 中:P f 12 …, 为单位向量阵.进一步定义矩阵集 仃 = E ( _ , , n)
摘 要 :讨论 了一类线 性连 续时 间 区间 系统 的容错控 制 问题 .把 带有执 行 器故 障的不确 定连 续 系统 转化 为 区间 系统 ,在 此基础 上 ,提 出了极 点约束 条件 下的 保成 本容错 控制 .分析 了故 障 闭环 系统 满足 区域极 点约 束和具 有保性 能上 界和 满足 指标 的 充分条件 ,并建 立 了容错 控制 中上述 期望指标的相容性理论.运用线性矩阵不等式 ( MI 技术,给出了一种严格的线性矩阵不等式 L ) 设计方案 ,清楚地给 出了期望的状 态反馈容错控制律 的表达式.通过数值算例验证 了所给算法的 有效 性. 关 键 词 :容错 控制 ;区 间系统 ;极 点 约束 ; 保 成本容错 控 制 中图分 类号 :T 1 文献 标识码 :A P3 d i 03 6 6i n10 — 8 1 0 0 2 0 o :1 . 9 .s. 7 9 3 . 1. . 2 9 s 0 2 00 近 年来 ,关 于 区间系 统 的理 论研 究取 得 了一 定 的成果 .文献【] 区 间系统 的鲁棒控 制进行 了系统 的 1 对