数字相机时序模拟技术
摄像机模拟与数字方案的比较

报告结构
本报告将首先介绍摄像机模拟 与数字方案的基本概念和原理。
然后,我们将从性能、成本、 适用性和未来发展等方面对这 两种方案进行详细的比较。
最后,我们将得出结论,并提 出一些建议。
02
模拟摄像机方案介 绍
模拟摄像机工作原理
01
模拟摄像机通过光电转换将景物 光信号转换为电信号,然后经过 信号处理和传输,最终在监视器 上显示出来。
数字摄像机的缺点
价格较高
相对于模拟摄像机,数字摄像机的价格较高,尤其是高端数字摄 像机。
对光线和环境要求较高
数字摄像机对光线和环境的要求较高,需要在一定的光照条件下才 能获得较好的拍摄效果。
需要定期维护和保养
数字摄像机需要定期进行维护和保养,以确保其正常工作和延长使 用寿命。
04
模拟与数字摄像机 比较分析
模拟摄像机的缺点
传输距离受限
模拟摄像机的传输距离受 到同轴电缆长度的限制, 不易实现长距离传输。
易受干扰
模拟信号容易受到电磁干 扰和信号衰减的影响,导 致图像质量下降。
不易存储和检索
模拟摄像机采集的图像以 模拟信号形式存储在录像 带上,不易进行数字化存 储和检索。
03
数字摄像机方案介 绍
数字摄像机工作原理
性能比较
清晰度
数字摄像机通常具有更高的分 辨率,能够提供更清晰的图像
。
色彩再现
数字摄像机可以更准确地捕捉 和再现色彩,而模拟摄像机可 能存在色彩失真。
动态范围
数字摄像机可以捕捉更广泛的亮 部和暗部细节,而模拟摄像机可 能无法处理高对比度的场景。
稳定性
数字摄像机通常具有更稳定的 性能,不易受温度、湿度等环
02
CCD相机驱动电路设计和信号处理技术研究
第35卷,增刊、b1.35S uppl e m ent红外与激光工程I n厅a r e d锄d Las er E ngi ne er i ng2006年10月O ct.2006 C C D相机驱动电路设计和信号处理技术研究林秋月,宋秋冬,刘会通,李金龙(中国航天科工集团津航物理技术研究所,天津300192).。
摘要:介绍了一种ccD相机前端电路的软硬件设计与实现。
对ccD时序驱动电路和信号处理电路进行了分析‘,对拖影(§m e砷处理等难点问题进行了讨论,并介绍了针对B a yer彩色滤波阵列的彩色图像还原方法,给出了处理结果.关键词:C C D;驱动电路;信号处理;拖影;彩色插值中图分类号:TN7文献标识码:A文章编号:1007—2276(2006)增A-0476一07C CD cam er a dr i V i ng ci r cui t des i gn and r es ear ch ofs i gnal pr oces s i ng t e chnol ogyLI N Q i u一”e,SO N G Q i u—dong,LIU H i u-t on g,LI m-l ong(J i n h柚g I n鲥t ut e ofTe c h ni c al Ph ys i cs,C A SI C,Ti姐j in300192,C hi m)A bs t r act:TI l e des研锄d i l l l pl em ent at i on of C C D c锄era仔ont chui t ar e m ai l l l y desc曲ed,i ncludi ng C C D dr i Vi I l gci rcui t柚d s i gIl al proce ss i l l g c i rc ui t.T he s m ear pr ob l em is a l so de t a i l e dl y di s cus sed.Fi nal l y'i m ag e c ol or re st or at i on f or B ay er c ol or f i lt er a rr ay i s d印i cted and t he r e sul t i s pr esen t ed.K e y w or ds:C C D;D r i V证g ci rcui t;Si gnal pm ces s i ng;Sm ear;C ol or i nt e巾ol a t i onO引言C CD数字相机是可见光成像系统的核心,与传统胶片相机相比,其优点是:(a)容量大,处理周期短,实时性好。
无人机数据处理中的时序数据融合技术

无人机数据处理中的时序数据融合技术随着无人机技术的不断发展,以及其在军事、民用领域中的广泛应用,无人机数据处理技术也越来越受到人们的关注。
其中,时序数据融合技术是无人机数据处理中的重要环节之一。
本文将对无人机数据处理中的时序数据融合技术做一些简要介绍。
一、什么是时序数据融合技术时序数据融合技术是指将多个传感器获取的数据按照时间顺序进行融合,形成一个完整的数据流,从而提高数据的精度和准确性。
在无人机中,由于其高空飞行和高速移动的特点,需要使用多个传感器进行数据采集。
比如,在无人机拍摄照片时,需要使用相机进行拍摄,同时还要采集位置数据、气象数据等,这些数据采集的时间可能并不是完全同步的。
而时序数据融合技术正是将这些数据按照时间顺序进行整合,从而得到更为准确的数据。
二、时序数据融合技术的应用1. 无人机遥感数据处理无人机在农业、林业、测绘等领域中有着广泛的应用。
在这些应用中,需要处理大量的无人机遥感数据。
而这些数据往往包含多个传感器采集的信息。
通过时序数据融合技术,可以将不同传感器采集的信息相互补充,从而得到更为准确的数据,使得决策者能够更好的进行决策。
2. 无人机自主控制时序数据融合技术还可以应用在无人机自主控制领域。
无人机在飞行时会受到多种因素的影响,比如空气流动状况、外部光照等。
通过采集和融合多个传感器的数据,可以更准确地识别和分析这些因素的影响,从而对无人机的飞行进行更精准的控制。
三、时序数据融合技术的实现方法无人机时序数据融合技术的实现,涉及到多个方面的技术,主要包括:传感器数据采集、数据预处理、传感器时间同步、数据融合算法等。
其中,数据融合算法是关键环节之一。
数据融合算法主要有以下几种:1. 加权平均法加权平均法是一种简单的数据融合算法。
只需要将不同传感器采集的数据进行加权平均,就可以得到整体的数据。
这种算法实现简单,但是精度和鲁棒性相对较差。
2. 卡尔曼滤波法卡尔曼滤波法是一种常用的数据融合算法。
数字摄影技术及其应用

数字摄影技术及其应用数字摄影技术及其应用数字摄影技术正随着科技的不断发展而不断进步,这种现代化技术正在越来越多的领域被应用到。
数字摄影技术,是将传统的胶片摄影技术通过数码科技进行了革新,以数字形式记录画面的技术,它的应用已经渗透到了人们的日常生活的各个方面,为人们的生活与工作带来了很大的便利。
数字摄影技术的基本原理是利用光敏电子仪器将影像转化为电信号信号,数字摄影技术比传统的胶片摄影技术更加便捷快速。
数字摄影机可以随时随地进行拍摄,记录生活中任何时间的美好瞬间。
数字照片可以随时随地进行处理,修整和制作。
数字照片不需要放大耗费很多时间,只需要通过计算机一些简单的操作就可以进行。
数字摄影技术已经成为了各个领域的技术骨干,为人们的生活与工作带来了很多的帮助。
在旅游行业中,可以利用数字摄影技术记录游客的旅游瞬间,通过拍摄美好瞬间来吸引更多的游客,使得旅游行业更加兴旺。
在广告行业中,数字摄影技术可以帮助企业快速地进行商品拍摄和制作,提高企业消费真实感。
在设计领域中,数字照片可以派上很大的用场。
设计工作需要很多素材,需要视觉元素的制作和处理,数字摄影师能够抓住角度和光线的变化,创造出更加出色的视觉设计效果。
在新闻媒体中,通过数字照片更能直观地描述文章的内容,可以使读者对新闻事件有更加深入的了解和认识。
数字摄影技术也细分为多个领域,像航空摄影,体育摄影,野生动物摄影,人物摄影等等。
每个领域的数字摄影技术都需要具有其独特的技巧、技能和方法。
例如,野生动物摄影师需要有良好的人际交往能力,灵敏的胆略、良好的计划和组织能力等。
则航拍摄影要求摄影师要熟悉航空器的安全和控制飞行等技巧。
而摄影运动员需要精通不同的体育竞技项目,准确捕捉运动员的精彩瞬间。
总之,数字摄影技术在设计、广告、旅游、新闻、科学等领域的广泛应用,可以加速信息传递和交流速度,为人们提供更多的便捷,更有活力的生活。
数字摄影技术行业是一个非常活跃和快速变化的行业,需要我们不断地学习和更新知识技能,迎接技术的挑战和变革,才能成为一名优秀的摄影师。
航空照相机的数字成像技术

航空照相机的数字成像技术航空照相机作为一种重要的航空设备,广泛应用于航空领域。
随着科技的进步,数字成像技术的发展为航空照相机带来了巨大的改变和进步。
本文将探讨航空照相机的数字成像技术在航空领域中的应用,并对其技术特点和未来发展进行分析。
一、航空照相机的数字成像技术简介航空照相机的数字成像技术是指利用数字信号处理和图像传感器的技术,将光学图像转换为数字信号进行处理和存储。
相比传统的胶片照相机,数字成像技术具有更高的灵敏度、更低的噪声水平以及更快的数据传输速度。
数字成像技术的发展为航空照相机带来了更精准、高效、便捷的成像能力,能够满足航空领域对于高质量航空影像的需求。
二、航空照相机的数字成像技术在航空领域中的应用1. 航空测绘与遥感航空照相机的数字成像技术在航空测绘与遥感领域中起到了至关重要的作用。
通过数字成像技术,航空照相机可以获得高分辨率、高质量的航空影像,进而实现对地表地貌、水体分布、植被覆盖等地理信息进行准确和高效的获取与分析。
这对于土地规划、资源管理、环境监测等行业具有重要意义,可以帮助人们更好地理解和保护地球的自然环境。
2. 航空摄影与航空摄像航空照相机的数字成像技术也广泛应用于航空摄影与航空摄像领域。
利用数字成像技术,航空照相机能够实现对航空器周围景物的高清成像,从而帮助航空工作者快速准确地识别和判断目标,提高飞行安全性。
此外,数字成像技术还可为航空摄像带来更多创意和效果,让航空摄影师能够捕捉到更美丽、震撼人心的航拍景色。
3. 航空勘查与监测航空照相机的数字成像技术在航空勘查与监测领域也发挥着重要作用。
通过数字成像技术,航空照相机可以实时获取航空器所经过区域的图像,并将其传输到地面站进行实时分析和处理。
这种实时数据反馈能够帮助航空勘查人员实时了解目标区域的变化和情况,提高水域、林区、城市等地方的巡查效率和质量。
三、航空照相机的数字成像技术的技术特点1. 高分辨率航空照相机的数字成像技术能够获得高分辨率的成像效果,从而实现对细微细节的捕捉。
3-CameraLink接口-时序控制.doc
CameraLink接口1.CameraLink接口简介1.1C ameraLink标准概述Camera Link 技术标准是基于 National Semiconductor 公司的 Channel Link 标准发展而来的,而Channel Link 标准是一种多路并行 LVDS 传输接口标准。
低压差分信号( LVDS )是一种低摆幅的差分信号技术,电压摆幅在 350mV 左右,具有扰动小,跳变速率快的特点,在无失传输介质里的理论最大传输速率在 1.923Gbps 。
90 年代美国国家半导体公司( National Semiconductor )为了找到平板显示技术的解决方案,开发了基于 LVDS 物理层平台的 Channel Link 技术。
此技术一诞生就被进行了扩展,用来作为新的通用视频数据传输技术使用。
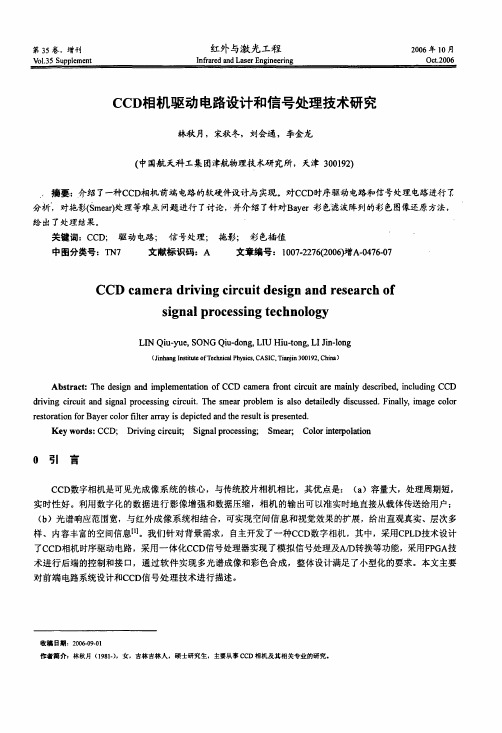
如图1.1所示, Channel Link 由一个并转串信号发送驱动器和一个串转并信号接收器组成,其最高数据传输速率可达 2.38G 。
数据发送器含有 28 位的单端并行信号和 1 个单端时钟信号,将 28 位 CMOS/TTL 信号串行化处理后分成 4 路 LVDS 数据流,其 4 路串行数据流和 1 路发送 LVDS 时钟流在 5 路 LVDS 差分对中传输。
接收器接收从 4 路 LVDS 数据流和 1 路 LVDS 时钟流中把传来的数据和时钟信号恢复成 28 位的CMOS/TTL 并行数据和与其相对应的同步时钟信号。
图1.1 camera link接口电路1.2C ameraLink端口和端口分配1.2.1端口分配在基本配置模式中,端口 A 、 B 和 C 被分配到唯一的 Camera Link 驱动器 / 接收器对上;在中级配置模式中,端口 D 、 E 和 F 被分配到第二个驱动器 / 接收器对上;在完整配置模式中,端口 A 、 B 和 C 被分配到第一个驱动器 / 接收器对上,端口 D 、 E 和 F 被分配到第二个驱动器 / 接收器对上,端口 G 和 H 被分配到第三个驱动器 / 接收器对上。
高速相机采样时序准确性检测方法

高速相机采样时序准确性检测方法杨亮;张宁;沈湘衡【摘要】A detection method on the accuracy of high -speed camera sampling sequence is proposed.Pulse signals are used to control and test the luminescence of the targets,and the detected targets are recorded with high speed cam-era.Through analyzing images and sampling sequence,the sampling frequency and time sequence of the high speed camera are obtained and verified.A set of sampling frequency detector was designed based on this method,and the frequency and time sequence of MS50K high -speed camera were analyzed with this detector.The results show that the frequency and time sequence of MS50K high speed camera are accurate,and the proposed method can be applied to the accuracy detection of sampling frequency and time sequence.The response time of this detector reaches 1μs af-ter modification,which can satisfy the requirements of the sampling sequence detection equipment.%提出了一种检测高速相机采样时序准确性的方法,该方法利用脉冲信号控制检测目标的发光状态,高速相机摄录检测目标,分析图像及采样时序,得到高速相机采样频率和时序是否准确可靠。
LCD用时序控制器(TCON)的技术与特征
31 ELECTRONIC ENGINEERING & PRODUCT WORLD 2020.1
Copyright©博看网 . All Rights Reserved.
责任编辑:毛烁
非常暗的区域,背光必须非常暗(如图4)。
笔记本电脑背光灯在面板边缘使用LED来减小面 板厚度。这些可以在1侧、2侧或全部4侧。每个边缘 都会增加成本和边框尺寸。
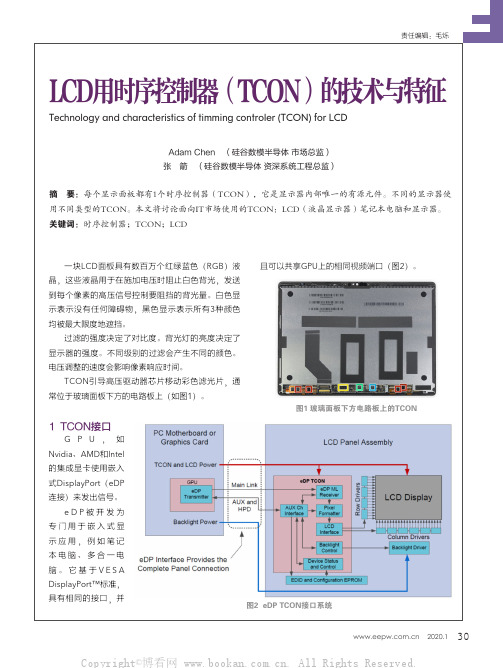
eDP被开发为 专门用于嵌入式显 示应用,例如笔记 本电脑、多合一电 脑。它基于VESA DisplayPort™标准, 具有相同的接口,并
图2 eDP TCON接口系统
2020.1 30
Copyright©博看网 . All Rights Reserved.
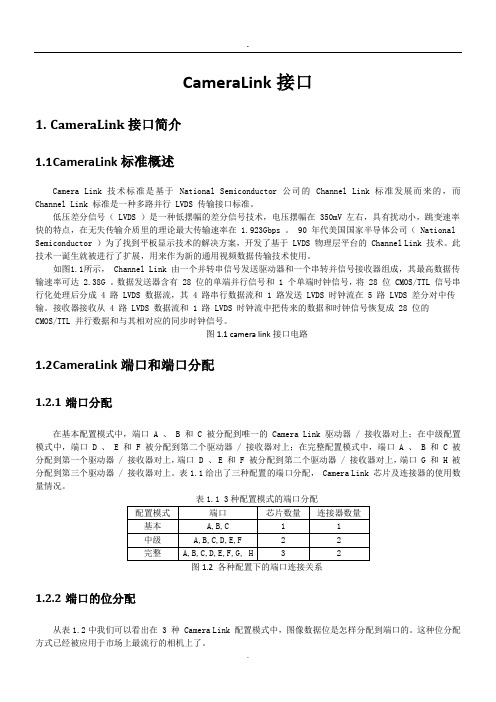
TCON引导高压驱动器芯片移动彩色滤光片,通 常位于玻璃面板下方的电路板上(如图1)。
且可以共享GPU上的相同视频端口(图2)。 图1 玻璃面板下方电路板上的TCON
1 TCON接口
GPU,如 Nvidia、AMD和Intel 的集成显卡使用嵌入 式DisplayPort(eDP 连接)来发出信号。
3)以60 Hz的频率刷新显示。但是,GPU会在 准备就绪时开始刷新显示。该技术通过动态更改刷新 率而无需更改任何模式,从而将GPU输出与显示刷 新同步,重点在于减少卡顿、撕裂和输入滞后(如图 10)。
Dynamic overdrive会根据情况更改超速参数。 Overdrive和PSR可以共享同一帧缓冲区。这增强了包 括游戏和视频编辑在内的各种应用程序的体验效果。 2.5 In-Cell Touch
图9 面板自刷新功能可延长电池寿命
33 ELECTRONIC ENGINEERING & PRODUCT WORLD 2020.1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.数字相机时序模拟技术简介
研究基于的数字相机时序模拟的原理与基本 技术。利用CPLD技术,可以模拟出CMOS图 像传感器场同步,行同步,像素时钟,像素 灰度值(8bit并行)等几种典型的CMOS图像 传感器时序信号,可为数字相机辅助电路调 试提供参考数据源。
数字相机时序模拟技术研究意义
1
2 9
入
IO/GCLK0
IO/GCLK1
I O
I O
1
I O
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I U3A
O
O
O
O
O
O
O
O
O
O
O
O
O
O
O
O
O
2
3
4
5
6
7
8
1
1
1
1
1
1
1
2
2
2
2
2
2
4
5
6
7
8
9
0
1
6
7
8
D12_CS_C
V3.3
GCLK1
D7_C
D6_C
D5_C
D4_C
D3_C
D2_C
D1_C
D0_C
1
VCC_C
VCC_C
C_TDI
C_TMS
C_TDO
C_TCK
3
6
1
1 9
3
3
U3C
VCCIO1
VCCIO1
VCCINT
(3.3V
or
2.5V)
VCCINT
(3.3V
or
2.5V)
1
R
0
4
K
1
R
0
2
K
1
R
0
1
K
VCC_C
CPLD
P
2
9
7
5
3
1
下
1
0 8
6
4
2
载
GNDINT
GNDINT
线
GNDIO
9
1
6
整个面(X,Y)
OV6620芯片简介
101376像素(352x288 ) 逐行扫描读出 8/16 bit视频数据:CCIR601, CCIR656, ZV端口 宽动态范围,抗模糊,零拖尾效应 电子曝光、增益、白平衡控制 图像增强:亮度、对比度、伽玛、饱和度、锐度、窗日等 内部/外部同步 帧曝光/行曝光选项 5V工作电压,低电源消耗 <80 mW工作功率 <10uA节电模式 伽玛校正(0.45/0.55/1.00) SCCB可编程(400kb/s) 色彩饱和度、亮度、对比度、白平衡、曝光时间、增益
数字相机的发展是日新月异,性价比不断改善。 因此CMOS图像传感器芯片获得了迅速的发展 和广泛应用 。而CMOS图像传感器的价格昂贵 而且极易损坏。对于CMO S图像传感器的实际 性能、外围电路的设计等方面都需要大量的试 验研究。 利用CPLD技术,模拟出CMOS图像传感器时序 信号,大大降低了试验成本、节约空间和降低 电路的复杂性,并且有效的提高了试验效率, 在实际应用中有重大意义。
16-bit数字图像输出时序图
3.利用CPLD输出时序信号
要想实现CMOS图像传感器的时序信号 的模拟,首先需要设计一个基于可编程 逻辑器件CPLD的时序信号发生器。
序列产生波形仿真图
VSYNC是垂直同步信号。HSYNC是水平同步信号。 PCLK是象素数据输出同步信号。 HSYNC为高时即可 开始有效数据采集,而PCLK下降沿的到来则表明数 据的产生,PCLK每出现一个下降沿,系统便传输一 位数据。在HSYNC为高电平期间,系统共可传输640 位数据。在一帧图像中,即VSYNC为低电平期间, HREF会出现480次高电平。而下一个VSYNC信号上 升沿的到来则表明分辨率640×480的图像采集过程 的结束。
IO/GCLK2
Y 4 7
7
I O
A14_C 8
7
5 1
SRAM_OE_C
I O O
I
A13_C 1 BANK 2
8
5 0
A15_C
I O O
I
A12_C 2
8
4 9Leabharlann A16_CI OI O
A11_C 3
8
4 8
A17_C
I O
I O
A10_C 4
8
4 7
A18_C
I O
I O
PWDN_T_C 5
8
4 4
CPLD模拟出OV6620时序信号
时钟信号用晶振电路
CPLD数据下载模块
C_TDI C_TMS C_TDO C_TCK
1
R
0
4
K
1
R
0
2
K
1
R
0
1
K
4.硬件设计电路部分
VCC_C
CPLD
P
2
9
7
5
3
1
下
1
0
8
6
4
2
载
线
VCC_C
电源模块
CPLD
Y
Y
A9_C
A8_C
A7_C
A6_C
A5_C
WE_C
Y
Y
Y
Y
SRAM_CE_C
A4_C
A3_C
A2_C
A1_C
A0_C
Y
EPM240T100C5 电
5
6
3
2
1
0
7
路
7
7
7
7
7
7
7
6
6
6
6
6
6
6
5
5
5
5
5
5
5
6
5
4
3
2
1
0
9
8
7
6
4
2
1
8
7
6
5
4
3
2
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
O
O
O
O
O
O
O
O
O
O
O
IO/GCLK3 O O O O O O O O
R18
5
VCC_C
0
GCLK1 POWER
DS5
总体设计电路
4 3 youyuanjingzhen JZ1 VCC O U T G 9 8 5 4 N N 4 0 9 5 D C EPM240T100C5 VCCIO2 VCCIO2 VCCIO2 VCCIO1 2 1 C_TMS C_TCK C_TDO C_TDI GNDIO GNDIO GNDIO GNDIO GNDIO 2 2 2 2 2 4 5 3 EPM240T100C5 U3B TMS TDO TDI 1 3 4 6 7 TCK 0 2 6 0 9
3
1
5
VCC_C
结论
本论文对CMOS图像传感器进行了研究,通过对 大量的有关图像传感器的学术论文和资料的学习 和分析,对图像传感器的发展过程,工作原理。 性能特点和使用方法有所掌握。独立完成整个系 统设计,大到从总体方案的设计小到分配与实现 每个管脚的功能。在实验中可以灵活运用调试工 具进行测试与分析,并以此为根据分析问题。完 成了对图像传感器OV6620和OV7620的研究。并 以此为根据利用VHDL语言和CPLD技术实现了 CMOS图像传感器的场同步,行同步,像素时钟, 像素灰度值等信号模拟技术。
2.数字相机相关理论概述
典型的CMOS图像传感 器由像素单元阵列及辅 助电路构成。其中像素 单元阵列主要实现光电 转换功能,辅助电路主 要完成驱动信号的产生、 光电信号的处理、输出 等任务。
初始化 设置YR 用同步信号复 位YL
启动行读出
Y=max?
启动列输出程序 设置列寄存器
从X=0到Xmax 下一行
I O
I O
图
Y1_T 2
9
3 7
I O
I O
像 Y2_T 5 9
3 6
CTRL_C
I O
I O
传
Y3_T 6
9
3 5
RD_C
I O
I O
感
Y4_T 7
9
BANK
1
3 4
CHANGE_C
器
I O
I O
Y5_T 8
9
3 3
OUT_ENABLE_C
信 I O
I O
Y6_T 9
9
3 0
号
I O
I O
Y7_T 0 0
TCK_C
I O
IO/DEV_CLRn
VSYNC_C 6
8
4 3
TMS_C
I O
IO/DEV_OE
HREF_C 7
8
4 2
TDO_C
I O
I O
PCLK_C 8
8
4 1
TDI_C
I O
I O
8 9
4 0
4040CLK_C
I O
I O
9 0
3 9
ADDRESS_C_C