2-2附合导线坐标计算
附合导线坐标计算
附合导线的坐标计算与闭合导线的坐标计算基本相同,仅在角度闭合差的计算与坐标增量闭合差的计算方
面稍有差别。导线的载流量对照表..
1.角度闭合差的计算与调整
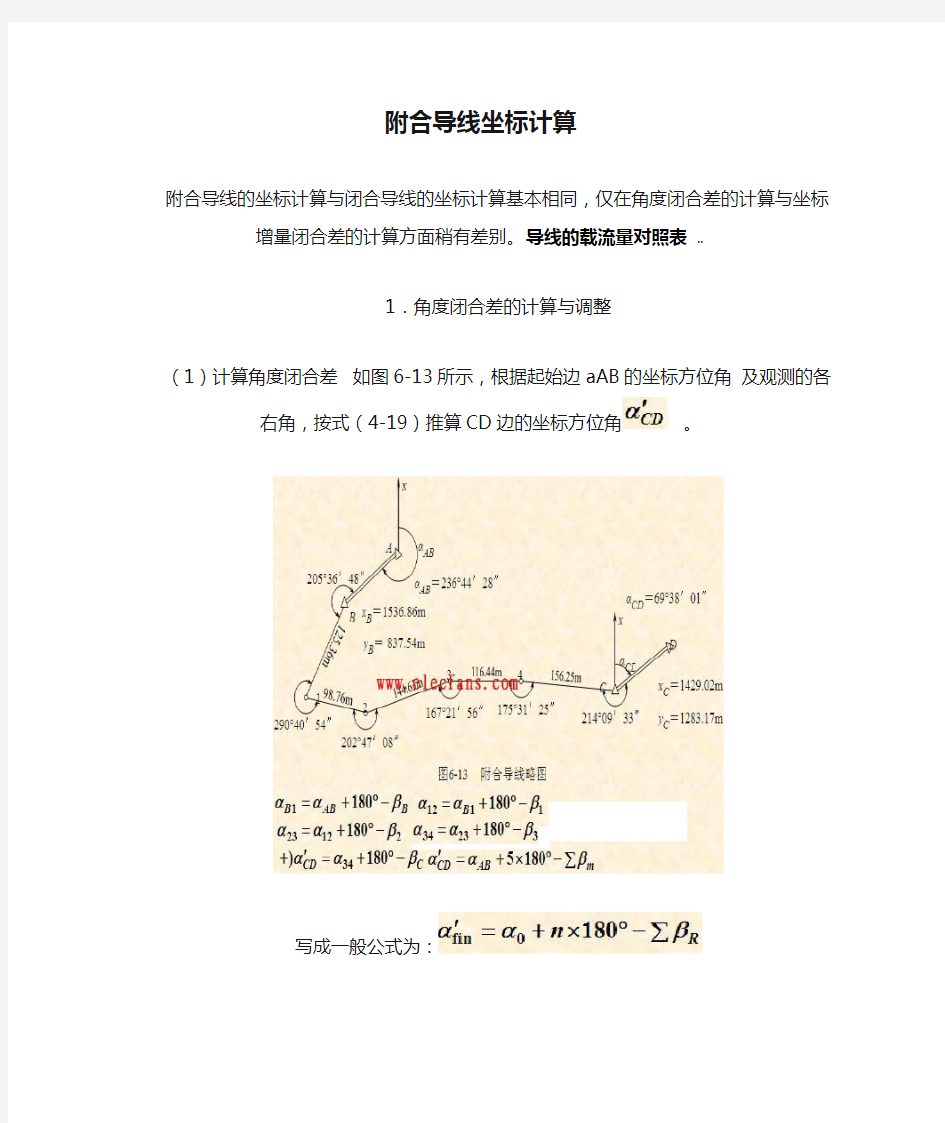
(1)计算角度闭合差如图6-13所示,根据起始边aAB的坐标方位角及观测的各右角,按式(4-19)
推算CD边的坐标方位角。
写成一般公式为:
若观测左角,则按下式计算:
附合导线的角度闭合差fβ为:
(2)调整角度闭合差当角度闭合差在容许范围内,如果观测的是左角,则将角度闭合差反号平均分配到各左角上;如果观测的是右角,则将角度闭合差同号平均分配到各右角上。
2.坐标增量闭合差的计算
附合导线的坐标增量代数和的理论值应等于终、始两点的已知坐标值之差,即
纵、横坐标增量闭合差为:
图6-13所示附合导线坐标计算,见表6-7。
表6-7 附合导线坐标计算表
最新导线测量的内业计算
导线测量的内业计算
第三节导线测量的内业 计算 导线测量内业计算的目的就是计算各导线点的平面坐标x、y。 计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。 一、坐标计算的基本公式 1.坐标正算 y 图6-10 坐标增量计算
根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。如图6-10所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。 直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。由图6-10可看出坐标增量的计算公式为: ?? ? =-=?=-=?AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos (6-1) 根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。坐标增量正、负号的规律如表6-5所示。 则B 点坐标的计算公式为:
?? ? +=?+=+=?+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos (6-2) 例6-1 已知AB 边的边长及坐标方位角为 456380m 62.135'''?==AB AB D α,,若A 点的坐标为 m 82.658m 56.435==A A y x ,,试计算终点B 的坐 标。 解 根据式(6-2)得 6 .792456380sin m 62.135m 82.658sin .457456380cos m 62.135m 56.435cos ='''??+=+=='''??+=+=AB AB A B AB AB A B D y y D x x αα2.坐标反算 根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。如图6-10所示,已知直线AB 两端点的坐标分别为(x A ,y A )和(x B ,y B ),则直线边长D AB 和坐标方位角αAB 的计算公式为: 2 2AB AB AB y x D ?+?= (6-3) AB AB AB x y ??=arctan α (6-4) 应该注意的是坐标方位角的角值范围在0?~360?间,而arctan 函数的角值范围在-90?~+90?间,两
(完整word版)导线测量及计算
导线测量 一、导线测量概述 导线——测区内相邻控制点连成直线而构成的连续折线(导线边)。 导线测量——在地面上按一定要求选定一系列的点依相邻次序连成折线,并测量各线段的边长和转折角, 再根据起始数据确定各点平面位置的测量方法。 主要用于带状地区、隐蔽地区、城建区、 地下工程、公路、铁路等控制点的测量。 导线的布设形式: 附合导线、闭合导线、支导线,导线网。 附合导线网自由导线网 钢尺量距各级导线的主要技术要求
注:表中n为测站数,M为测图比例尺的分母表6J-1 图根电磁波测距附合导线的技术要求 二、导线测量的外业工作 1.踏勘选点及建立标志
2.导线边长测量 光电测距(测距仪、全站仪)、钢尺量距 当导线跨越河流或其它障碍时,可采用作辅助点间接求距离法。 (α+β+γ)-180o 改正内角,再计算FG边的边长:FG=bsinα/sinγ 3.导线转折角测量 一般采用经纬仪、全站仪用测回法测量,两个以上方向组 成的角也可用方向法。 导线转折角有左角和右角之分。当与高级控制点连测时, 需进行连接测量。 三、导线测量的内业计算 思路: ①由水平角观测值β,计算方位角α; ②由方位角α及边长D, 计算坐标增量ΔX 、 ΔY; ③由坐标增量ΔX 、ΔY,计算X、Y。
(计算前认真检查外业记录,满足规范限差要求后,才能进行内业计算)坐标正算(由α、D,求X、Y) 已知A(x A,y A),D AB,αAB,求B点坐标x B,y B。 坐标增量: 待求点的坐标: (一)闭合导线计算 图6-10是实测图根闭合导线示意图,图中各项 数据是从外业观测手簿中获得的。 已知数据: 12边的坐标方位角:12 =125°30′00″;1点的坐 标:x1=500.00,y1=500.00 现结合本例说明闭合导线计算步骤如下: 准备工作:填表,如表6-5 中填入已知数据和 观测数据. 1、角度闭合差的计算与调整: n边形闭合导线内角和理论值: (1) 角度闭合差的计算: 例:fβ=Σβ测-(n-2)×180o=359o59'10"-360o= -50"; 闭合导线坐标计算表(6-5)
三、附合导线坐标计算
三、附合导线坐标计算 附合导线的坐标计算与闭合导线的坐标计算基本相同,仅在角度闭合差的计算与坐标增量闭合差的计算方面稍有差别。 1.角度闭合差的计算与调整 (1)计算角度闭合差 如图6-13所示,根据起始边AB 的坐标方位角 AB α及观测的各右角,按式(4-19)推算CD 边的坐标方位角CD α'。 B AB B βαα-?+=1801 1112180βαα-?+=B 1429.02m 1283.17m 图6-13 附合导线略图
21223180βαα-?+= 32334180βαα-?+= C CD βαα-?+='+180)34 ∑-??+='m AB CD βαα1805 写成一般公式为: ∑-??+='R n βαα1800fin (6-18) 若观测左角,则按下式计算: ∑+??+='L n βαα1800fin (6-19) 附合导线的角度闭合差f β为: fin fin ααβ-'=f (6-20) (2)调整角度闭合差 当角度闭合差在容许范围内,如果观测的是左角,则将角度闭合差反号平均分配到各左角上;如果观测的是右角,则将角度闭合差同号平均分配到各右角上。 2.坐标增量闭合差的计算 附合导线的坐标增量代数和的理论值应等于终、始两点的已知坐标值之差,即 ?? ? -=?-=?∑∑0fin th 0fin th y y y x x x (6-21) 纵、横坐标增量闭合差为:
? ? ? --?=?-?=--?=?-?=∑∑∑∑∑∑)()(0fin th 0fin th y y y y y W x x x x x W y x (6-22) 图6-13所示附合导线坐标计算,见表6-7。 表6-7 附合导线坐标计算表
附合导线平差教程
附合导线导线平差步骤 城市平面控制网的种类较多,有GPS网、三角网、边角组合网和导线网,其中导线网按等级划分为三、四等和一、二、三级。本文以附合导线的内业数据处理为例,说明控制点坐标平差处理的方法。 导线的内业计算,就是根据起始点的坐标和起始边的坐标方位角,以及所观测的导线边长和转折角,计算各导线点的坐标。计算的目的除了求得各导线点的坐标外,还有就是检核导线外业测量成果的精度。 在转入内业计算之前,应整理并全面检查外业测量的基础资料,检查数据是否完整,是否有记录错误和计算错误,是否满足精度要求,起算数据是否正确和完整,然后绘制相应导线的平面草图,并将相关数据标示于草图的对应部位。 如图2-21所示的附合导线,观测转折角为左角,计算的步骤如下: (1)填表。 计算之前,首先将示意图中各观测数据(观测角和边长)和已知数据(起始边和附合边的坐标方位角,起始点和终止点的坐标)填入相应表格之中,如表2-19所示。 (2)角度闭合差的计算与调整。 如图2-20所示的附合导线,观测转折角为左角,根据坐标方位角的推算公式可以依次计算各边的坐标方位角: αA1=αBA+180°+β A α12=αA1+180°+β 1 α2C=α12+180°+β 2 +)α CD ′=α 2C +180°+β C αCD′=αBA+43180°+∑β测左计算终边坐标方位角的一般公式为: α 终边′=α 始边 +n2180°+∑β测左(2-5) 式中n为导线观测角个数。 角度闭合差的计算公式为: f β测 =α终边′-α终边(2-6)
图2-21 附合导线计算示意图 角度闭合差f β的大小,表明测角精度的高低。对于不同等级的导线,有不同的限差(即f β容)要求,例如图根导线角度闭合差的允许值为: f β容=±60″n (2-7) 式中n 为多边形内角的个数。这一步计算见辅助计算栏,f β测=+41″, f β 容 =±120″。 若f β测≤f β容,说明测角精度符合要求,此时需要进行角度闭合差的调整。 调整是应注意:当用左角计算α终边 ′时,改正数的符号与f β测符号相反;当用右 角计算α 终边 ′时,改正数的符号与f β测符号相同。可将闭合差按相反符号平均分 配给各观测角,而得出改正角: β=β测-f β测/n (2-8) 式中n 为多边形内角的个数。按(-f β测/n )式计算的改正数,取位至秒,填入表格第3列。 当f β测>f β容时,则说明测角误差超限,应停止计算,重新检测角度。 (3)坐标方位角的推算 根据起始边的坐标方位角及改正角,用(2-5)式依次计算各边的坐标方位角,填入第5列。为了检核,最后应重新推算结束边的坐标方位角,它应与已知数值相等。否则,应重新推算。例如 α CD ′ =α 2C +180°+βC =139°50′18″+180°+49°02′38″=8°52′ 55″ (4)坐标增量的计算及闭合差调整 坐标增量计算,就是根据已经推算出的导线各边的坐标方位角和相应边的边长,按式(2-9)、(2-10)计算各边的坐标增量。 ΔX AB =D AB 2cos αAB (2-9)
导线坐标内业计算
第三节 导线测量的内业 计算 导线测量内业计算的目的就是计算各导线点的平面坐标x 、y 。 计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。 一、坐标计算的基本公式 1.坐标正算 根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。如图6-10 所示, y 图6-10 坐标增量计算
已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。 直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。由图6-10可看出坐标增量的计算公式为: ???=-=?=-=?AB AB A B AB AB AB A B AB D y y y D x x x α αsin cos (6-1) 根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。坐标增量正、负号的规律如表6-5所示。 表6-5 坐标增量正、负号的规律 则B 点坐标的计算公式为: ???+=?+=+=?+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x α αsin cos (6-2) 例6-1 已知AB 边的边长及坐标方位角为 456380m 62.135'''?==AB AB D α ,,若 A 点的坐标为
附合导线计算方法
附合导线计算方法 已知A (X=,Y=),B (X=,Y=),C (X=,Y=),D (X=,Y=)四点坐标,及a AB (起始边), AB =tan -1(XA XB YA YB --)=tan -1(2507.6983.229963.12158.1303--)=-22。59”’ =-22。59”’+180=157000”52’(计算方位 角为负,所以要加上180) 同理求出0”’ 1:用求出 AB ±观测角(左正右负)±180, 依次加减,得出最后的‘CD 方位角,用计算 的方位角‘CD -CD =闭合差值 B1方位角=157000”52’-192 。14,24,,+180=144。46,28,, 12方位角=144。46,28 ,,-236。48,36,,+180=87。57,52,, 23方位角=87。57,52,,-170 。39,36,,,+180=97。38,16,, 34方位角=97。38,16,,-180。
00,48,,+180=97。17,28,, 4C方位角=97。17,28,,-230。32,36,,+180=46。44,52,, ‘ -CD=46。44,52,, CD -46045”23’=-31” 将角度闭合差除与测边数分配到各观测角中即:-31÷5=”(角度闭合差调整中,观测角为左角时反符号平均分配到各观测角中,观测角为右角时,则按闭合差同符号分配到测角,如有小数,按长边少分,短边多分原则)即: B1观测角=192。14,24,,-6”=192。14,18,, 12观测角=236。48,36,,-6”=236。48,30,, 23观测角=170。39,36,,-6”=170。39,30,, 34观测角=180。00,48,,-7”=180。00,41,, 4C观测角=230。32,36,,-6”=230。32,30,, 用调整后的观测角计算方位角:
附合导线平差教程
. 附合导线导线平差步骤 城市平面控制网的种类较多,有GPS网、三角网、边角组合网和导线网,其中导线网按等级划分为三、四等和一、二、三级。本文以附合导线的内业数据处理为例,说明控制点坐标平差处理的方法。 导线的内业计算,就是根据起始点的坐标和起始边的坐标方位角,以及所观测的导线边长和转折角,计算各导线点的坐标。计算的目的除了求得各导线点的坐标外,还有就是检核导线外业测量成果的精度。 在转入内业计算之前,应整理并全面检查外业测量的基础资料,检查数据是否完整,是否有记录错误和计算错误,是否满足精度要求,起算数据是否正确和完整,然后绘制相应导线的平面草图,并将相关数据标示于草图的对应部位。 如图2-21所示的附合导线,观测转折角为左角,计算的步骤如下: (1)填表。 计算之前,首先将示意图中各观测数据(观测角和边长)和已知数据(起始边和附合边的坐标方位角,起始点和终止点的坐标)填入相应表格之中,如表2-19所示。 (2)角度闭合差的计算与调整。 如图2-20所示的附合导线,观测转折角为左角,根据坐标方位角的推算公式可以依次计算各边的坐标方位角: αα+β-180°= BAA1Aαα+β-180=° 12A11αα+180=°+β2 122C′αα+180+)=°+βC CD2C ′βαα°180×-=4+∑测左CDBA计算终边坐标方位角的一般公式为:nβαα 2-5)°′=+∑(-·180测左终边始边为导线观测角 个数。式中n 角度闭合差的计算公式为:αα 2-6 =f′(实测)-(理 论)()β测终边终边. . 2-21 附合导线计算示意图图 的大小,表明测角精度的高低。对于不同等级的导线,有不角度闭合差fβ f) 要求,例如图根导线角度闭合差的允许值为:同的限差(即β容n)(″2-7
导线计算
6.4.1 导线布设形式 (一)导线 将测区内相邻控制点连成直线而构成的折线,称为导线。这些控制点称为导线点。导线测量就是依次测定各导线边的长度和各转折角值;根据起算数据,推算各边的坐标方位角,从而求出各导线点的坐标。 用经纬仪测量转折角,用钢尺测定边长的导线,称为经纬仪导线;若用光电测距仪测定导线边长,则称为电磁波测距导线。 (二)闭合导线
以高级控制点A、B中的A点为起始点,并以AB边的坐标方位角αAB为起始坐标方位角,经过1、2、3、4点仍回到起始点A,形成一个闭合多边形的导线称为闭合导线。 (三)附合导线 以高级控制点A、B中的B点为起始点,以AB边的坐标方位角αAB为起始坐标方位角,经过5、6、7、8点,附合到另外两个高级控制点CD中的C点,并以CD边的坐标方位角αCD为终边坐标方位角,这样的导线称为附合导线。 (四)支导线 从一个高级控制点C和一条高级边的坐标方位角αCD出发延伸出去的导线称为支导线。由于支导线缺少对观测数据的检核,故其 边数及总长都有限制。 6.4.2 踏勘选点及建立标志 选点前,应调查搜集测区已有地形图和高一级的控制点的成果资料,把控制点展绘在地形图上,然后在地形图上拟定导线的布 设方案,最后到野外去踏勘,实地核对、修改、落实点位。如果测区没有地形图资料,则需详细踏勘现场,根据已知控制点的分 布、测区地形条件及测图和施工需要等具体情况,合理地选定导线点的位置。 实地选点时,应注意下列几点: (1) 相邻点间通视良好,地势较平坦,便于测角和量距;
(2) 点位应选在土质坚实处,便于保存标志和安置仪器; (3) 视野开阔,便于施测碎部; (4) 导线各边的长度应大致相等,除特殊情形外,对于二、三级导线,其边长应不大于350m,也不宜小于50m,平均边长如表6.3和表6.4所示; (5) 导线点应有足够的密度,分布较均匀,便于控制整个测区。
测绘中级 附合导线测量的内业计算的方法步骤
第三节 导线测量的内业计算 导线测量内业计算的目的就是计算各导线点的平面坐标x 、y 。 计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。 一、坐标计算的基本公式 1.坐标正算 根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。如图6-10所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。 直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。由图6-10可看出坐标增量的计算公式为: ? ??=-= ?=-=?AB AB A B AB AB AB A B AB D y y y D x x x α αsin cos (6-1) y 图6-10 坐标增量计算
根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。坐标增量正、负号的规律如表6-5所示。 表6-5 坐标增量正、负号的规律 则B 点坐标的计算公式为: ? ??+=?+=+=?+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x α α sin cos (6-2) 例 6-1 已知 AB 边的边长及坐标方位角为 456380m 62.135' ''?==AB AB D α ,,若 A 点的坐标为 m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。 解 根据式(6-2)得 m 62.792456380sin m 62.135m 82.658sin m 68.457456380cos m 62.135m 56.435cos ='''??+=+=='''??+=+=AB AB A B AB AB A B D y y D x x α α 2.坐标反算 根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。如图6-10所示,已知直线AB 两端点的坐标分别为(x A ,y A )和(x B ,y B ),则直线边长D AB 和坐标方位角αAB 的计算公式为: 2 2AB AB AB y x D ?+?= (6-3) AB AB AB x y ??=arctan α
附合导线坐标计算表和空白表格
A 224°02′ 52″843.4 1264.29 B(1)114°17′00″-2″114°16′58″640.93 1068.44 158°19′ 50″82.17 +0 -76.36 +1 +30.34 -79.36 +30.35 2 146°59′30″-2″146°59′28″564.57 1098.79 125°19′ 18″77.28 +0 -44.68 +1 +63.05 -44.68 +63.06 3 135°11′30″-2″135°11′28″519.89 1161.85 80°30′46″89.64 +0 +14.77 +2 +88.41 +14.77 +88.43 4 145°38′30″-2″145°38′28″534.66 1250.28 46°09′14″79.84 +0 +55.31 +1 +57.58 +55.31 +57.59 C(5)158°00′00″-2″157°59′58″589.97 1307.87 24°09′ 12″ D 793.61 1399.19 总和700°06′30″-10″700°06′20″328.93 -50.96 +239.38 -50.96 +239.43 辅助计算аAB=arctan A B A B x x y y - - = 224°02′52″ аCD= arctan C D C D x x y y - - =24°09′12″ а′CD=аAB+∑β测-N×180°=24°09′22″ β f=а′CD-аCD=24°09′22″-24°09′12″=+10″ 容 β f=±60" ± =134 5 ∑±= - - ? =00 .0 b c) (X X X f x ∑-= - - ? =05 .0 c ) ( B y Y Y Y f 05 .0 2 2- = + = y x D f f f 2000 1 6600 1 93 . 328 05 .0 ≤ = = = ∑D f K D 作图
(完整版)闭合及附合导线测量内业计算方法
闭合及附合导线测量内业计算方法(好东西) 1. 导线方位角计算公式 当β为左角时 α前=α后+β左-180° 当β为右角时 α前=α后-β右+180° 2. 角度闭合差计算 fβ=(α始-α终)+∑β左-n*180° fβ=(α始-α终)-∑β右+n*180° 3. 观测角改正数计算公式 Vβ=±fβ/ n 若观察角为左角,应以与闭合差相反的符合分配角度闭合差,若观察角为右角,应以与闭合差相同的符合分配角度闭合差。 4. 坐标增量闭合差计算 ∑△X=X终-X始 ∑△Y= Y终-Y始 Fx=∑△X测-∑△X FY=∑△Y测-∑△Y 5. 坐标增量改正数计算公式 VX=- Fx/∑D3Di VY=-FY/∑D3Di2 2 所以:∑VX= - Fx ∑VY= - FY 6. 导线全长绝对闭合差 F=SQR(FX^2+FY^2) 7. 导线全长相对闭合差 K=F/∑D=1/∑D/F 8. 坐标增量计算
导线测量的内业方法 本人不才悉心整理出来的望能给同行业人士提供点资料 (一)闭合导线内业计算 已知A点的坐标XA=450.000米,YA=450.000米,导线各边长,各内角和起始边AB的方位角αAB如图所示,试计算B、C、D、E各点的坐标。 1 角度闭合差: 图6—8 闭合导线算例草图 角度的改正数△β为:
2、导线边方位角的推算 BC边的方位角 CD边的方位角 AB边的方位角 右角推算方位角的公式: (校核) 3、坐标增量计算 设D12、α12为已知,则12边的坐标增量为: 4、坐标增量闭合差的计算与调整 因为闭合导线是一闭合多边形,其坐标增量的代数和在理论上应等于零,即: 但由于测定导线边长和观测内角过程中存在误差,所以实际上坐标增量之和往往不等于零而产生一个差值,这个差值称为坐标增量闭合差。分别用表示: 缺口AA′的长度称为导线全长闭合差,以f表示。由图可知: 图6—9 闭合导线全长闭合差 导线相对闭合差。 对于量距导线和测距导线,其导线全长相对闭合差一般不应大于1/2000。
2-1 闭合导线的坐标计算
闭合导线的坐标计算 现以图6-11所注的数据为例(该例为图根导线),结合“闭合导线坐标计算表”的使用,说明闭合导线坐标计算的步骤。 1.准备工作 将校核过的外业观测数据及起算数据填入“闭合导线坐标计算表”中,见表6-6,起算数据用单线标明。 2.角度闭合差的计算与调整 (1)计算角度闭合差?如图6-11所示,n边形闭合导线内角和的理论值为: 两者之差,称为角度闭合差,用 ? (26-3和表6-?,说明所测水平角不符合要求,应对水平角重新检查或重测。 如果,说明所测水平角符合要求,可对所测水平角进行调整。 (3)计算水平角改正数?如角度闭合差不超过角度闭合差的容许值,则将角度闭合差反符号平均分配到各观测水平角中,也就是每 个水平角加相同的改正数vβ,vβ的计算公式为:
计算检核:水平角改正数之和应与角度闭合差大小相等符号相反,即(4)计算改正后的水平角?改正后的水平角βi改等于所测水平角加上水平角改正数 (11 ??? 不等于零,从而产生纵坐标增量闭合差Wx和横坐标增量闭合差Wy,即 3)计算导线全长闭合差WD和导线全长相对闭合差WK???从图6-12b可以看出,由于坐标增量闭合差Wx、Wy的存在,使导线不能闭合,1-1′之长度WD称为导线全长闭合差,并用下 式计算仅从WD值的大小还不能说明导线测量的精度,
衡量导线测量的精度还应该考虑到导线的总长。将WD与导线全长∑D相比,以分子为1的分数表示,称为导线全长相对闭合差 WK,即 以导线全长相对闭合差WK来衡量导线测量的精度,WK的分母越大,精度越高。不同等级的导线,其导线全长相对闭合差的容许 值WKP参见表6-3和表6-4,图根导线的WKP为1/2000。 如果WK>WKP,说明成果不合格,此时应对导线的内业计算和外业工作进行检查,必要时须重测。 (4) 计算检核:纵、横坐标增量改正数之和应满足下式(5)计算改 本例中导线边 5.计算各导线点的坐标 根据起始点1的已知坐标和改正后各导线边的坐标增量,按下式依次推算出各导线点的坐标: 将推算出的各导线点坐标,填入表6-6中的第11、12栏内。最后还应再次推算起始点1的坐标,其值应与原有的已知值相等,以作为计算检核。附导线的载流量对照表. 表6-6?闭合导线坐标计算表
附合导线平差步骤
附合导线平差步骤 Prepared on 22 November 2020
控制点坐标平差处理 城市平面控制网的种类较多,有GPS网、三角网、边角组合网和导线网,其中导线网按等级划分为三、四等和一、二、三级。本文以附合导线的内业数据处理为例,说明控制点坐标平差处理的方法。 导线的内业计算,就是根据起始点的坐标和起始边的坐标方位角,以及所观测的导线边长和转折角,计算各导线点的坐标。计算的目的除了求得各导线点的坐标外,还有就是检核导线外业测量成果的精度。 在转入内业计算之前,应整理并全面检查外业测量的基础资料,检查数据是否完整,是否有记录错误和计算错误,是否满足精度要求,起算数据是否正确和完整,然后绘制相应导线的平面草图,并将相关数据标示于草图的对应部位。 如图2-21所示的附合导线,观测转折角为左角,计算的步骤如下: (1)填表。 计算之前,首先将示意图中各观测数据(观测角和边长)和已知数据(起始边和附合边的坐标方位角,起始点和终止点的坐标)填入相应表格之中,如表2-19所示。 (2)角度闭合差的计算与调整。 如图2-20所示的附合导线,观测转折角为左角,根据坐标方位角的推算公式可以依次计算各边的坐标方位角: α =αBA+180°+βA A1 α =αA1+180°+β1 12 α =α12+180°+β2 2C
+)αCD ′=α2C +180°+βC αCD ′=αBA +4×180°+∑β测左 计算终边坐标方位角的一般公式为: α终边′=α始边+n ·180°+∑β测左(2-5) 式中n 为导线观测角个数。 角度闭合差的计算公式为: f β测=α终边′-α终边(2-6) 图2-21附合导线计算示意图 角度闭合差f β的大小,表明测角精度的高低。对于不同等级的导线,有不同的限差(即f β容)要求,例如图根导线角度闭合差的允许值为: f β容=±60″n (2-7) 式中n 为多边形内角的个数。这一步计算见辅助计算栏,f β测=+41″,f β容 =±120″。 若f β测≤f β容,说明测角精度符合要求,此时需要进行角度闭合差的调整。调整是应注意:当用左角计算α终边′时,改正数的符号与f β测符号相反;当用右角计算α终边′时,改正数的符号与f β测符号相同。可将闭合差按相反符号平均分配给各观测角,而得出改正角: β=β测-f β测/n(2-8) 式中n 为多边形内角的个数。按(-f β测/n )式计算的改正数,取位至秒,填入表格第3列。 当f β测>f β容时,则说明测角误差超限,应停止计算,重新检测角度。 (3)坐标方位角的推算 根据起始边的坐标方位角及改正角,用(2-5)式依次计算各边的坐标方位角,填入第5列。为了检核,最后应重新推算结束边的坐标方位角,它应与已知数值相等。否则,应重新推算。例如 αCD ′=α2C +180°+βC =139°50′18″+180°+49°02′38″=8°52′55″ (4)坐标增量的计算及闭合差调整
全站仪闭合及符合导线测量内业计算方法(2014)
全站仪导线测量计算书 (一)闭合导线内业计算 已知A点的坐标X A=450.000米,Y A=450.000米,导线各边长,各内角和起始边AB的方位角αAB如图所示,试计算B、C、D、E各点的坐标。 1、角度闭合差的计算和调整 闭合导线的内角和在理论上应满足下列条件: 角度闭合差: 图6—8闭合导线算例草图 角度的改正数△β为: 2、导线边方位角的推算 BC边的方位角
CD边的方位角 ………………………………………… AB边的方位角(校核) 右角推算方位角的公式: 右角推算方位角的公式: 3、坐标增量计算 设D12、α12为已知,则12边的坐标增量为: 4、坐标增量闭合差的计算与调整 因为闭合导线是一闭合多边形,其坐标增量的代数和在理论上应等于零,即: 但由于测定导线边长和观测内角过程中存在误差,所以实际上坐标增量之和往往不等于零而产生一个差值,这个差值称为坐标增量闭合差。分别用表示: 缺口AA′的长度称为导线全长闭合差,以f表示。由图可知:
图6—9闭合导线全长闭合差 导线相对闭合差。 对于量距导线和测距导线,其导线全长相对闭合差一般不应大于1/2000。 调整的方法是:将坐标增量闭合差以相反符号,按与边长成正比分配到各条边的坐标增量中,公式为: 的改正数= 的改正数= 的改正数=米 的改正数=米 5、导线点的坐标计算 根据导线起算点A的已知坐标及改正后的纵、横坐标增量,可按下式计算B点的坐标:
起始点A的坐标已知,则B点的坐标为: (二)附合导线的内业计算 图6—10附和导线算例草图 1、角度闭合差的计算和调整 2、坐标增量闭合差的计算 由于A、E的坐标为已知,所以从A到E的坐标增量也就已知,即:
导线的概念及计算
导线测量导线测量的内业计算附合导线、闭合导线、支导线,导线网第二节导线测量 一、导线测量概述 导线——测区内相邻控制点连成直线而构成的连续折线(导线边)。 导线测量——在地面上按一定要求选定一系列的点依相邻次序连成折线,并测量各线段的边长和转折角, 再根据起始数据确定各点平面位置的测量方法。 主要用于带状地区、隐蔽地区、城建区、 地下工程、公路、铁路等控制点的测量。 导线的布设形式: 附合导线、闭合导线、支导线,导线网。 附合导线网自由导线网 钢尺量距各级导线的主要技术要求
注:表中n为测站数,M为测图比例尺的分母表6J-1 图根电磁波测距附合导线的技术要求 二、导线测量的外业工作 1.踏勘选点及建立标志
2.导线边长测量 光电测距(测距仪、全站仪)、钢尺量距 当导线跨越河流或其它障碍时,可采用作辅助点间接求距离法。 (α+β+γ)-180o 改正内角,再计算FG边的边长:FG=bsinα/sinγ 3.导线转折角测量 一般采用经纬仪、全站仪用测回法测量,两个以上方向组成的角也可用方向法。导线转折角有左角和右角之分。当与高级控制点连测时,需进行连接测量。 三、导线测量的内业计算 思路: ①由水平角观测值β,计算方位角α; ②由方位角α及边长D, 计算坐标增量ΔX 、 ΔY; ③由坐标增量ΔX 、ΔY,计算X、Y。
(计算前认真检查外业记录,满足规范限差要求 后,才能进行内业计算) 坐标正算(由α、D,求X、Y) 已知A(x A,y A),D AB,αAB,求B点坐标x B,y B。 坐标增量: 待求点的坐标: (一)闭合导线计算 图6-10是实测图根闭合导线示意图,图中各项数据是从外业观测手簿中获得的。 已知数据: 12边的坐标方位角:12 =125°30′00″;1点的坐标:x1=500.00,y1=500.00 现结合本例说明闭合导线计算步骤如下: 准备工作:填表,如表6-5 中填入已知数据和观测数据. 1、角度闭合差的计算与调整: n边形闭合导线内角和理论值: (1) 角度闭合差的计算: 例:fβ=Σβ测-(n-2)×180o=359o59'10"-360o= -50"; 闭合导线坐标计算表(6-5)
附合导线平差步骤
控制点坐标平差处理 城市平面控制网的种类较多,有GPS网、三角网、边角组合网和导线网,其中导线网按等级划分为三、四等和一、二、三级。本文以附合导线的内业数据处理为例,说明控制点坐标平差处理的方法。 导线的内业计算,就是根据起始点的坐标和起始边的坐标方位角,以及所观测的导线边长和转折角,计算各导线点的坐标。计算的目的除了求得各导线点的坐标外,还有就是检核导线外业测量成果的精度。 在转入内业计算之前,应整理并全面检查外业测量的基础资料,检查数据是否完整,是否有记录错误和计算错误,是否满足精度要求,起算数据是否正确和完整,然后绘制相应导线的平面草图,并将相关数据标示于草图的对应部位。 如图2-21所示的附合导线,观测转折角为左角,计算的步骤如下: (1)填表。 计算之前,首先将示意图中各观测数据(观测角和边长)和已知数据(起始边和附合边的坐标方位角,起始点和终止点的坐标)填入相应表格之中,如表2-19所示。 (2)角度闭合差的计算与调整。 如图2-20所示的附合导线,观测转折角为左角,根据坐标方位角的推算公式可以依次计算各边的坐标方位角: αA1=αBA+180°+β A α12=αA1+180°+β 1 α2C=α12+180°+β 2 +)αCD′=α2C+180°+β C αCD′=αBA+43180°+∑β测左 计算终边坐标方位角的一般公式为: α终边′=α始边+n2180°+∑β测左(2-5)式中n为导线观测角个数。 角度闭合差的计算公式为: fβ测=α终边′-α终边(2-6)
图2-21 附合导线计算示意图 角度闭合差fβ的大小,表明测角精度的高低。对于不同等级的导线,有不同的限差(即fβ容)要求,例如图根导线角度闭合差的允许值为: fβ容=±60″n(2-7)式中n为多边形内角的个数。这一步计算见辅助计算栏,fβ测=+41″, fβ 容=±120″。 若fβ测≤fβ容,说明测角精度符合要求,此时需要进行角度闭合差的调整。调整是应注意:当用左角计算α终边′时,改正数的符号与fβ测符号相反;当用右角计算α终边′时,改正数的符号与fβ测符号相同。可将闭合差按相反符号平均分配给各观测角,而得出改正角: β=β测-fβ测/n (2-8) 式中n为多边形内角的个数。按(-fβ测/n)式计算的改正数,取位至秒,填入表格第3列。 当fβ测>fβ容时,则说明测角误差超限,应停止计算,重新检测角度。 (3)坐标方位角的推算 根据起始边的坐标方位角及改正角,用(2-5)式依次计算各边的坐标方位角,填入第5列。为了检核,最后应重新推算结束边的坐标方位角,它应与已知数值相等。否则,应重新推算。例如 αCD′=α2C+180°+βC=139°50′18″+180°+49°02′38″=8°52′55″ (4)坐标增量的计算及闭合差调整 坐标增量计算,就是根据已经推算出的导线各边的坐标方位角和相应边的边长,按式(2-9)、(2-10)计算各边的坐标增量。 ΔX AB=D AB2cosαAB(2-9)
附合导线计算方法及心得
附合导线计算方法 已知A (X=2507.69,Y=1215.63),B (X=2299.83,Y=1303.8),C (X=2166.74,Y=1757.27),D (X=2361.71,Y=1964.32)四点坐标,及a AB (起始边),a CD (终止边)计算得出。 ?AB =tan -1( XA XB YA YB --)=tan -1(2507.6983.229963.12158.1303--)=-22。59”08.47’ =-22。59”08.47’+180=157000”52’(计算方位角为负,所以要加上180) 同理求出?CD 方位角坐标为46045”23 1:用求出 ?AB ±观测角(左正右负)±180,依次加减,得出最后的? ‘CD 方位角,用计算的方 位角?‘CD -?CD =闭合差值 B1方位角=157000”52’-192。14,24,,+180=144。46,28,, 12方位角=144。46,28,,-236。48,36,,+180=87。57,52,, 23方位角=87。57,52,,-170。39,36 ,,,+180=97。38,16,, 34方位角=97。38,16,,-180。00,48,, +180=97。17,28,, 4C 方位角=97。17,28,, -230。32,36,,+180=46。44,52,, ?‘CD -?CD =46。44,52,,-46045”23’ =-31” 将角度闭合差除与测边数分配到各观测角中即:-31÷5=-6.2”(角度闭合差调整中,观测角为左角时反符号平均分配到各观测角中,观测角为右角时,则按闭合差同符号分配到测角,如有小数,按长边少分,短边多分原则)即: B1观测角=192。14,24,,-6”=192。14,18,, 12观测角=236。48,36,,-6”=236。48,30,, 23观测角=170。39,36,,-6”=170。39,30,, 34观测角=180。00,48,,-7”=180。00,41,, 4C 观测角=230。32,36,,-6”=230。32,30,, 用调整后的观测角计算方位角: B1方位角=157000”52’-192。14,18,,+180=144。46,34,,