智能圆弧半径测量仪的设计
圆度测量仪的设计及制作
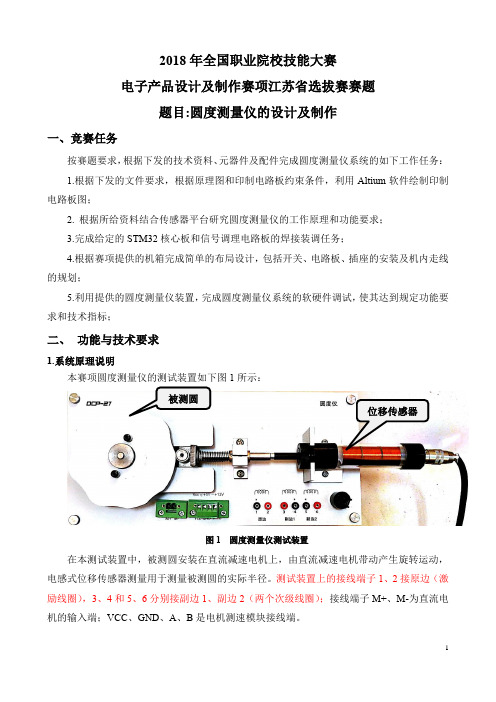
2018年全国职业院校技能大赛电子产品设计及制作赛项江苏省选拔赛赛题题目:圆度测量仪的设计及制作一、竞赛任务按赛题要求,根据下发的技术资料、元器件及配件完成圆度测量仪系统的如下工作任务:1.根据下发的文件要求,根据原理图和印制电路板约束条件,利用Altium软件绘制印制电路板图;2.根据所给资料结合传感器平台研究圆度测量仪的工作原理和功能要求;3.完成给定的STM32核心板和信号调理电路板的焊接装调任务;4.根据赛项提供的机箱完成简单的布局设计,包括开关、电路板、插座的安装及机内走线的规划;5.利用提供的圆度测量仪装置,完成圆度测量仪系统的软硬件调试,使其达到规定功能要求和技术指标;二、功能与技术要求1.系统原理说明本赛项圆度测量仪的测试装置如下图1所示:被测圆位移传感器图1 圆度测量仪测试装置在本测试装置中,被测圆安装在直流减速电机上,由直流减速电机带动产生旋转运动,电感式位移传感器测量用于测量被测圆的实际半径。
测试装置上的接线端子1、2接原边(激励线圈),3、4和5、6分别接副边1、副边2(两个次级线圈);接线端子M+、M-为直流电机的输入端;VCC、GND、A、B是电机测速模块接线端。
圆度是衡量实际圆对理想圆变动量的一项指标,其公差带是以公差值t为半径差的两同心圆之间的区域。
圆度公差属于形状公差,圆度误差值不大于相应的公差值,则认为合格。
在实际测量中,两同心圆圆心位置的确定有最小包容区域法、最小外接圆法、最大内切圆法和最小二乘圆法四种方法,其中最小二乘圆法也叫平均圆法,当被测圆上各测点或误差曲线上的点至某圆圆心的距离平方和为最小时,该圆即为最小二乘圆,各测量点到该圆心的最大距离和最小距离之差即为该被测圆的圆度误差。
在本赛项中假设直流减速电机的轴心即为同心圆的圆心位置。
圆度测量仪被测圆的半径测量采用电感式位移传感器,电感式位移传感器的结构示意图如图2所示:图2 电感式位移传感器结构示意图位移传感器由三个依次排列的线圈和可移动铁芯。
模具圆弧内径自动测量仪的设计

模具圆弧内径自动测量仪的设计
刘惠萍
【期刊名称】《自动化技术与应用》
【年(卷),期】2003(022)001
【摘要】本文提出了一种利用微计算机控制步进电机及位移传感器测量模具圆弧内径的方法,详细介绍了测量仪的组成,测量原理,硬件电路和程序框图.
【总页数】3页(P56-57,64)
【作者】刘惠萍
【作者单位】哈尔滨锅炉厂有限责任公司
【正文语种】中文
【中图分类】TP216+.1
【相关文献】
1.6204型轴承内径自动测量仪的研制 [J], 周丽丽;宋魁;张平宽
2.火炮身管内径测量仪的结构设计 [J], 崔秀梅;张青锋
3.套类零件全自动生产线在线内径测量仪的设计 [J], 陈桂芬
4.内径表测量圆弧半径的方法设计 [J], 李云虹;刘兴富
5.基于三坐标测量仪的双圆弧齿轮自动测量技术 [J], 宋利民;王伟东;李良燕;李吉伟;曹黎萍;任少英;姜宏奎;张宏建
因版权原因,仅展示原文概要,查看原文内容请购买。
数显圆弧半径测量仪
数显圆弧半径测量仪广州威而信精密仪器有限公司 刘兴富摘 要 本文运用传感器技术、微计算机技术和集成电路技术设计的圆弧半径测量仪,既可测量内、外圆弧,又能快速显示被测圆弧的半径尺寸,具有体积小、可手持测量的特点,适合在生产车间加工现场测量。
误差分析表明,数显测量仪可以满足一般精度圆弧半径的测量要求。
关键词 半径 测量仪 圆弧 数字显示 1 概述在机械制造、模具加工等工业生产领域中,经常会碰到工件非整圆的圆弧面半径的测量问题,如何测量非整圆的圆弧半径,已往的方法是:1)用圆弧样板(半径规)测量这种方法受圆弧样板数量的限制,大部分圆弧都找不到与其对应的圆弧样板,无法实现无级测量。
2)用普通卡尺测量通过测量直径得到半径,如果被测圆弧的圆心角小于180 ,则不能得到圆弧的半径。
如果通过控制弧高的方法,测量圆弧的弦长,则需通过数学计算才能得到圆弧的半径。
3)用光学仪器测量测量前需要装夹和找正,测量后还要通过数学计算求解半径,对测量者技术要求高,操作过程繁琐,仪器价值高、投资大。
笔者针对以上测量圆弧半径方法的不足和局限性,将机械技术、传感器技术、微计算机技术和集成电路技术有机结合起来,制成的数显圆弧半径测量仪,可直接显示被测圆弧的半径,测量范围大,可以实现无级测量;其结构简单、体积小、成本低。
可以弥补已往圆弧半径测量方法的不足。
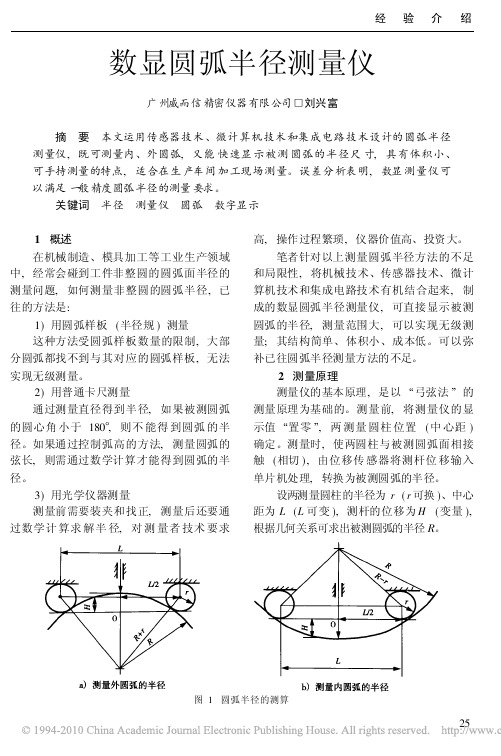
2 测量原理测量仪的基本原理,是以!弓弦法∀的测量原理为基础的。
测量前,将测量仪的显示值!置零∀,两测量圆柱位置(中心距)确定。
测量时,使两圆柱与被测圆弧面相接触(相切),由位移传感器将测杆位移输入单片机处理,转换为被测圆弧的半径。
设两测量圆柱的半径为r (r 可换)、中心距为L (L 可变),测杆的位移为H (变量),根据几何关系可求出被测圆弧的半径R。
图1 圆弧半径的测算25经验介绍由图1a)可得方程式(R +r )2-(L 2)2=(R -H +r )2解此方程式,可得外圆弧半径的计算公式R =f (r ,L,H )=L 2+4H28H -r (1)由图1b)可得方程式(R -r )2-(L 2)2=(R -H -r )2解此方程式,可得内圆弧半径的计算公式R =f (r ,L,H )=L 2+4H28H+r (2)还可以将式(1)、式(2)表示为R =f (r ,L,H )=L 2+4H28H#r(3)3 结构与电路测量仪的结构如图2所示。
一种圆弧半径测量仪[实用新型专利]
![一种圆弧半径测量仪[实用新型专利]](https://img.taocdn.com/s3/m/117db2f1a8114431b80dd859.png)
专利名称:一种圆弧半径测量仪专利类型:实用新型专利
发明人:闫悦
申请号:CN202021533050.3申请日:20200729
公开号:CN212320613U
公开日:
20210108
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种圆弧半径测量仪,包括基准板、与基准板的端部相连的转动板,所述圆弧半径测量仪在测量时基准板的下沿面和转动板的上沿面之间成30°夹角并相交于一点,圆弧半径测量仪与待测圆弧相接触使得基准板的下沿面和转动板的上沿面分别与待测圆弧相交产生交点,两个所述交点之间的直线距离等于待测圆弧的半径。
本实用新型具有圆弧半径测量方便,测量仪整体结构简单,适用于所有圆心角大于60°的圆弧半径测量等优点。
申请人:闫悦
地址:310000 浙江省杭州市下城区稻香园(南)9-3-403
国籍:CN
代理机构:杭州五洲普华专利代理事务所(特殊普通合伙)
代理人:南梦怡
更多信息请下载全文后查看。
圆弧半径测量尺[实用新型专利]
![圆弧半径测量尺[实用新型专利]](https://img.taocdn.com/s3/m/b896e3e0250c844769eae009581b6bd97e19bc76.png)
[19]中华人民共和国国家知识产权局[12]实用新型专利说明书[11]授权公告号CN 2765138Y [45]授权公告日2006年3月15日专利号 ZL 200520000602.3[22]申请日2005.01.10[21]申请号200520000602.3[73]专利权人吴天际地址100037北京市西三环北路105号首都师范大学物理系沈京玲转吴天际[72]设计人吴天际 [74]专利代理机构北京北新智诚知识产权代理有限公司代理人赵郁军[51]Int.CI.G01B 5/08 (2006.01)权利要求书 1 页 说明书 4 页 附图 3 页[54]实用新型名称圆弧半径测量尺[57]摘要本实用新型公开了一种圆弧半径测量尺,它由主尺和可在主尺上滑动的副尺组合而成。
所述主尺为圆弧型,在主尺上开有一圆弧型的滑槽,在滑槽的上边刻有表示被测圆弧半径大小的刻度;在主尺的左端有一小圆,该小圆与主尺圆弧边相切,且其圆心与主尺的0刻度点位于同一直线上。
所述副尺上粘贴有一与主尺左端小圆大小、厚度一致的小圆,该小圆与主尺的圆弧边相切,与主尺左端的小圆位于同一平面上;在副尺上刻有一条直线,小圆的圆心就位于这条直线上。
测量时,将被测圆弧夹在主尺和副尺上的小圆之间,使其同时与两个小圆和主尺圆弧边相切,通过副尺上的直线和主尺上的刻度线即可直接读出被测圆弧的半径。
本实用新型结构简单,实用性强。
200520000602.3权 利 要 求 书第1/1页 1、一种圆弧半径测量尺,其特征在于:它由主尺和可在主尺上滑动的副尺组合而成;所述主尺为圆弧型,在主尺上开有一圆弧型的滑槽,在滑槽的上边刻有表示被测圆弧半径大小的刻度;在主尺的左端有一小圆,该小圆与主尺圆弧边相切,且其圆心与主尺的0刻度点位于同一直线上;所述副尺由副尺底板、与主尺左端小圆大小、厚度一致的小圆和固定片组合而成;该小圆粘贴在副尺底板上,并且当副尺与主尺组合后,该小圆与主尺的圆弧边相切,与主尺左端的小圆位于同一平面上;在副尺底板上刻有一条直线,小圆的圆心就位于这条直线上;所述固定片嵌在所述主尺滑槽内,并可沿主尺滑槽滑动,所述固定片粘贴在所述副尺底板上。
智能圆弧半径测量仪的设计
智能圆弧半径测量仪的设计
刘春荣
【期刊名称】《机械设计与制造》
【年(卷),期】2009(000)010
【摘要】介绍了圆弧半径弓弦法测量原理.利用此原理,基于容栅传感器和89C51单片机设计了测量内、外圆弧半径的智能测量仪,进行了误差分析,并提出了测量仪几何精度的设计原则.该测量仪测量范围宽,适用于加工现场快速测量,能满足一定精度的测量要求.
【总页数】3页(P51-53)
【作者】刘春荣
【作者单位】陕西理工学院,汉中,723003
【正文语种】中文
【中图分类】TH12
【相关文献】
1.智能电阻电容测量仪的设计与制作 [J], 刘俞辰
2.一种智能体型体重测量仪的设计 [J], 黄立端; 赵娟
3.论智能化测量仪表设计理念 [J], 许恒源[1]
4.智能材料热膨胀系数测量仪的设计 [J], 李炎龙;谭方宁;熊小民;陈志颖;徐祖华
5.智能齿轮双啮测量仪软件设计 [J], 齐秉钧
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
智能圆弧半径测量仪的设计*刘春荣(陕西理工学院,汉中723003)Intelligent circular arc radius measuring instrument ’s designLIU Chun-rong(Shaanxi University of Technology ,Hanzhong 723003,China )文章编号:1001-3997(2009)10-0051-02【摘要】介绍了圆弧半径弓弦法测量原理。
利用此原理,基于容栅传感器和89C51单片机设计了测量内、外圆弧半径的智能测量仪,进行了误差分析,并提出了测量仪几何精度的设计原则。
该测量仪测量范围宽,适用于加工现场快速测量,能满足一定精度的测量要求。
关键词:圆弧半径;半径测量;测量仪;误差分析【Abstract 】Introduced the circular arc radius survey principle based on bowstring ing this principle ,based on capacitive bar sensor and the 89C51microcomputer design the intelligent measuring instrument that surveyed the inside and outside circular arc radius ,has carried on the error analysis ,and proposed the measuring instrument GDOP principle of design.This measuring instrument measuring range is wide ,is suitable in processes the scene rapid survey ,can satisfy certain precision the survey request.Key words :Circular arc radius ;Radius survey ;Measuring instrument ;Error analysis中图分类号:TH12文献标识码:A*来稿日期:2008-12-29*基金项目:陕西省重点实验室资助(05JS15)1引言在机械零件的制造和检验中,经常会碰到无法用直接法测量的半径测量问题,如大圆、圆心角小于180°的非完整圆,以及扇形齿轮等。
在生产现场要准确、方便、快捷地测出这类零件的圆弧半径,是非常困难的。
目前已有的测量方法主要有:圆弧样板测量法、卡尺法和弓弦法,基于这几种测量方法设计出来的测量装置都存在一定的不足和局限性。
针对这些不足,将传感器技术、单片机技术、机械传动技术有机结合起来,设计圆弧半径智能测量仪,直接数显被测圆弧的半径值。
该测量仪,实现了半径的无级测量、在线测量,具有结构简单、操作方便、测量范围大的特点,弥补了以往大圆及非完整圆半径测量方法的不足。
2测量原理2.1圆弧半径“弓弦法”测量原理由几何知识知:不在一条直线上的三个点唯一确定一个圆,如图1所示。
设被测工件横截面圆周上有A 、B 、C 三个点,C 为AB 弧段的中点,则有:R 2=(L )2+(R-H )2即:R =H 2+L 28H (1)由此可见:当圆弧的弦长L 确定后,只要测出其固定弦的高度H ,就可以间接获得被测弧的半径R ,此方法即为“弓弦法”圆弧半径测量原理,如图1所示。
2.2测量仪测量原理圆弧半径智能测量仪的基本原理是以上述“弓弦法”的测量原理为基础,如图2(a )、图2(b )所示。
装置结构中,为了保证测量时方便、快捷、可靠地找到被测零、工件的正截面,避免在线测量时测量脚尖部划伤工件表面,以及因磨损造成测量误差,因此将A 、B 两测脚设计成可转动圆柱,测杆设计成球头杆。
图1弓弦法测量原理图(a )外圆弧测量原量(b)内圆弧测量原量图2智能测量仪测量原理图设两测量圆柱的半径为r ,中心距为L ,测杆的位移为H 。
根Machinery Design &Manufacture机械设计与制造第10期2009年10月51据几何关系可求得被测圆弧半径R。
由图2(a)可得:(R+r)2=(L)2+(R-H+r)2则外圆弧半径的计算公式为:R=L2+4H28H-r(2)由图2(b)可得:(R-r)2=(L)2+(R-H-r)2则内圆弧半径的计算公式为:R=L2+4H28H+r(3)将(2)、(3)两式合并,得圆弧半径的计算公式为:R=f(R,H,r)=L2+4H28H±r(4)3测量仪结构设计圆弧半径智能测量仪的结构,如图3所示。
图3圆弧半径测量仪结构1.主尺2.左触头3.触轮4.销轴5.右触轮6.中触头(测杆)7.控制显示装置8.定位旋钮9.测量旋钮10.螺杆11.螺母12.机体13.被测圆弧主要由以下两个部分组成:(1)传动定位部分:主要由测量旋钮9、定位旋钮8、螺杆10和螺母11、机体12等组成,其作用是使控制装置采集到一个固定的弦长L。
测量半径前,松开定位旋钮8,旋转测量旋钮9,使螺杆10旋转,由螺母11带动左、右触头以中触头为中心,在基面上滑动并张开至合适的位置(根据被工件圆弧半径大小而定)后,拧紧定位旋钮8,可得到一个测量用的固定弦长L。
此值可从主尺上可直观看到,同时也被控制装置采集到单片机中,以备计算半径用。
(2)测量装置:主要由容栅传感器、控制数显装置7、左、中、右三个测量触头等组成。
三个测量触头构成3点确定一个圆,由传感器采集弦长L和弦高H,在控制装置中完成数据处理,并显示测量结果R。
4测量仪系统的设计测量仪的系统组成,如图4所示。
图4测量仪系统组成图测量仪选用容栅位移传感器。
容栅传感器具有好的抗干扰能力;测量速度快;对环境要求不高;能防尘,对空气湿度不敏感;结构简单、小巧,易于安装,适用于测量仪使用。
容栅位移传感器由动栅板和定栅板两部分组成,利用鉴相原理实现位移测量。
容栅传感器将位移转换成电容的变化,由测量电路将电容的变化转换为交流信号的相位变化,这样只要测出信号的相位变化量即可知道被测位移的大小。
处理电路包含了鉴相型测量专用集成电路和电平转换电路.经处理电路将传感器采集的数据送入单片机中,由单片机对数据进行计算、存储,并向LCD 输出测量结果。
智能测量仪在系统设计时,利用AT89C51的TXD 和RXD引脚信号,采用ICL232芯片与PC机的COM口进行串行通信,以适应现代工业控制逐渐从单机转向多机和联网的发展。
5测量仪的误差分析作为测量仪器,首先要满足测量精度。
5.1系统误差分析测量仪器在制造过程中的几何参数误差会引起仪器测量的系统误差。
这里主要分析测量触头对称度误差和测量读数误差对误差的影响。
由式(4)得直径计算公式为:D=f(L,H,r)=L2+4H2±2r(5)对式(5)求全微分得:d D=L d L+(1-L2)d H±2d r(6)设弦半长为a,则a=L/2,带入上式,则得:d D=2aHd a+(1-a2H2)d H±2d r(7)弓弦法圆弧半径测量属于间接测量,被测工件的极限测量误差取决于独立变量a、H和r的极限误差。
由于r引起的误差属于固定误差,且在测量前在平板上校对测杆的“零位”,因此d r不会产生测量误差;d a和d H属于随机误差。
根据误差理论,可得被测直径的极限误差为:δ(D)=2aH2δ2(a)+a2H2-12δ2(H)姨(7)由图1的几何关系知:a=R sinθH=R(1-cosθθ)代入式(7)中,整理可得:δ(D)=21-cosθ(sinθ·δ(a))2+(cosθ·δ(H))2姨(8)根据上式知:在大圆或非完整圆的被测弧长范围内,越大,则越小;、越小,则越小。
所以为了减小测量误差,提高测量仪器的测量精度,可采取以下途径:(1)提高制造精度,以减小左、右两测量触头的不对称度δ(a)。
(2)提高传感器精度来减小δ(H);(3)根据被测工件的弧长选择尽可能大测量弦长,以增大测量弧长所对应的圆心角2θ。
5.2精度设计原则对(8)式中,影响仪器的精度的主要因素作进一步分析,可得出如下δ(H)、δ(a)的设计原则。
(1)当固定弦长对应的圆心角2θ=90°时,和对仪器测量精度影响的权重系数相等;当固定弦长对应的圆心角2θ=74°~106°时,δ(H)和δ(a)对仪器测量精度影响的权重系数处理电路按键RS232通信接口LCD显示驱动2路容栅传感器CPU89C51第10期刘春荣:智能圆弧半径测量仪的设计52基于模糊优化设计的摩擦离合器接合性能分析*杨勇强张曼李香林(陕西科技大学机电工程学院,西安710021)Engagement performance analyses of friction clutch based on fuzzy optimization designYANG Yong-qiang ,ZHANG Man ,LI Xiang-lin(School of Mechanical &Electronic ,Shaanxi University of Science &Technology ,Xi ’an 710021,China )文章编号:1001-3997(2009)10-0053-03【摘要】在摩擦离合器模糊优化设计的基础上,建立了离合器接合过程的动力学模型,并分别对传统设计和模糊优化设计离合器的接合过程进行了仿真,得到了多种工况下接合过程摩擦片的角速度、滑摩功率变化规律。
仿真结果表明,应用模糊优化设计的离合器在保证工作体积最小、传递转矩性能最佳的基础上,在动力学性能方面也有明显改善。
关键词:模糊优化;仿真;动力学性能【Abstract 】Based on fuzzy optimization design ,engagement dynamic model of friction clutch is es -tablished ,clutch engagement of traditional design and fuzzy optimum design are simulated respectively ,and fiction plate ’s velocity and friction power rule in some work cases are obtained.Engagement dynamic Performance by fuzzy optimum design are improved by simulation results on the basis of the structure of clutch to be minimum and the dynamic transmission to be best of all.Key words :Fuzzy optimum ;Simulation ;Dynamic performance中图分类号:TH12,TP391.9文献标识码:A1引言摩擦离合器是各类离合器中应用广泛的一种,多用于机床、大中型牵引车和自卸汽车等。